雙有源橋變換器動態(tài)響應影響因素及改善對策
2021-09-23 08:24:06湯旭東王學梅
電氣自動化 2021年4期
關鍵詞:方法
湯旭東, 王學梅
(華南理工大學 電力學院,廣東 廣州 510640)
0 引 言
雙有源橋(dual active bridge,DAB)變換器最早在20世紀90年代由Dedoncker提出[1],是一種隔離型的雙向DC/DC變換器。擁有高功率密度、高效率、能量雙向傳輸特性和便于級聯(lián)與并聯(lián)等特點,近十年來得到了越來越多的關注和研究。目前,DAB變換器在微電網、固態(tài)變壓器、電動汽車和儲能系統(tǒng)等領域得到了大量的研究和應用[2-4]。
在實際應用中,要求DAB變換器具有高動態(tài)響應性能。在雙有源橋-超級電容(DAB-SC)混合儲能系統(tǒng)中,DAB變換器的動態(tài)響應速度對系統(tǒng)的整體動態(tài)響應起著關鍵的作用。當系統(tǒng)的輸入電壓或者負載發(fā)生擾動時,需要儲能系統(tǒng)快速穩(wěn)定電壓,即使是電壓的短時波動,也會導致系統(tǒng)的工作不正常[5]。當光伏發(fā)電短時出現(xiàn)陰影情況時需要對儲能系統(tǒng)進行功率補償,DAB變換器的動態(tài)響應速度會直接對輸出的穩(wěn)定性產生影響[6]。在多電飛機(more electric aircraft, MEA)電源系統(tǒng)中,電池儲能系統(tǒng)(battery energy storage system, BESS)通過DAB變換器與直流配電總線連接,由于BESS需要提供瞬態(tài)/突發(fā)功率給引擎啟動發(fā)電機,要求DAB變換器有足夠快的動態(tài)響應來保證負載功率連續(xù)[7]。對于后背式不間斷電源(uninterrupted power supply, UPS),一般都要求轉換時間在10 ms以內,需要DAB變換器擁有較高響應速度來滿足UPS的設計要求[8]。
因此動態(tài)響應性能是DAB變換器能否在相關場景應用并發(fā)揮其優(yōu)勢的關鍵。在輸入電壓或者輸出負載產生擾動或者突變時,DAB變換器的輸出應該超調盡量小,動態(tài)調節(jié)時間足夠短。近年來,許多中外學者致力于研究改善DAB變換器的動態(tài)響應的對策。因此,本文主要目的是深入理解當前DAB變換器的動態(tài)控制策略,對改善動態(tài)響應速度的對策進行全面的比較和分析,并針對現(xiàn)有控制策略存在的局限性,展望其未來的發(fā)展方向。
1 雙有源橋DC-DC變換器
DAB變換器一般使用移相調制,單移相(single-phase-shift,SPS)是其最早被提出時就使用的調制方法,之后學者還提出了擴展移相(extended-phase-shift,EPS)[9]、雙重移相(dual-phase-shift,DPS)[10]以及三重移相(triple-phase-shift,TPS)[11]等基本調制方法,可提高DAB變換器效率,但控制相對復雜。目前的動態(tài)控制方法多基于SPS調制。
DAB電路拓撲如圖1所示。圖1中:n為變壓器變比;Uin和Uo為輸入輸出電壓。設k=nUin/Uo為電壓傳輸比,k=1時為理想匹配狀態(tài),所有開關管都工作在零電壓開關(ZVS)狀態(tài),k≠1時稱為電壓失配;L為輔助電感和變壓器漏感的總和。DAB變換器SPS調制電壓電流波形如圖2所示:Uab和Ucd為H橋的端電壓;iL為電感電流;D為Uab和Ucd之間的移相占空比;fs為開關頻率,如果移相比大于零,Uab超前Ucd,能量從原邊傳遞給副邊,反之移相比小于零,則能量從副邊傳遞到原邊。電感電流iL的波形對稱,圖1中I0=-I2,I1=-I3。D為SPS調制的唯一控制變量。SPS調制下的傳輸功率P為:
(1)
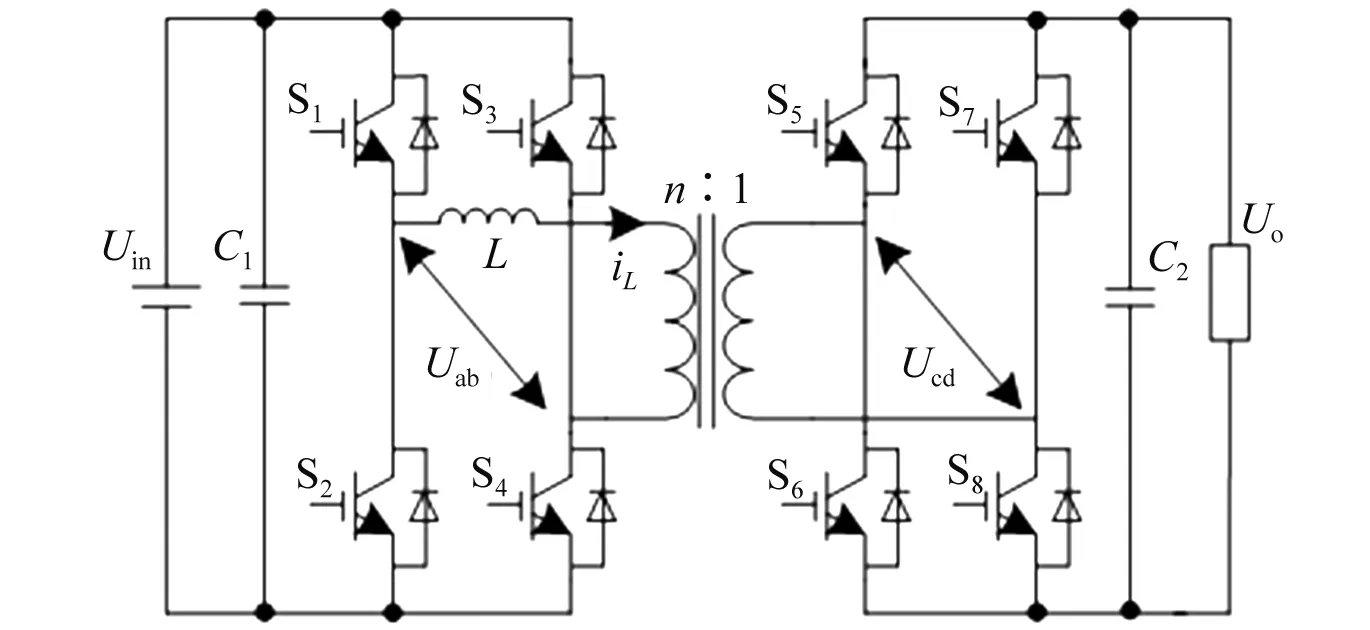
圖1 DAB變換器拓撲
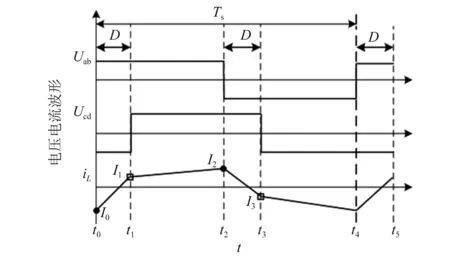
圖2 DAB變換器單移相調制波形圖
2 DAB變換器動態(tài)響應的影響因素
2.1 直流偏移
DAB變換器發(fā)生擾動時,移相比產生突變ΔD,電感電流產生直流偏移。通過對SPS調制DAB變換器移相比突增、突減和正/負反向四種瞬態(tài)過程的電流進行分析[12]3206,移相比突增時:
(2)
式中:Idc為直流偏移量;ΔD為移相比突增量。
顯然,ΔD越大,直流偏移越大。移相比從0.1跳變至0.5時仿真波形如圖3所示,電感電流整體向上偏移,瞬態(tài)過程出現(xiàn)了較大的尖峰。在控制環(huán)路不穩(wěn)定時,移相比的頻繁抖動也可能引起微小直流偏移的累積,最終導致不可忽視的直流偏移。
如果不采取措施應對直流偏移,由于存在線路阻抗Rs,在足夠的時間內Idc也會逐漸減小到零,Rs越小,瞬態(tài)調節(jié)時間越長。因此直流偏移影響DAB變換器的動態(tài)響應速度。

圖3 瞬態(tài)電感電流波形(D從0.1到0.5)
2.2 死區(qū)效應
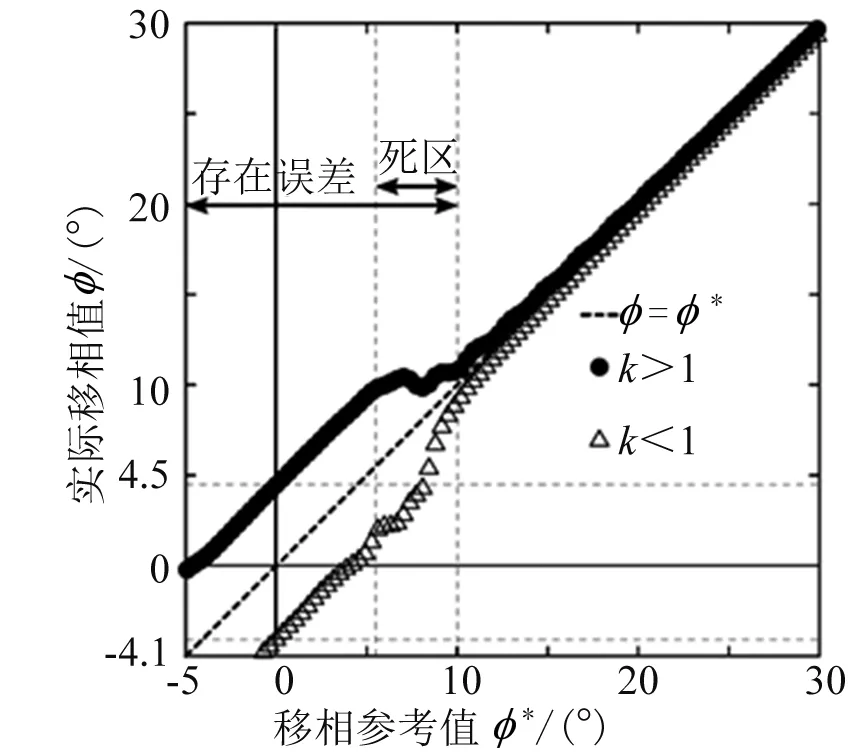
圖4 死區(qū)效應帶來的移相誤差[17](k=nUin/Uo)
死區(qū)是為了防止同一橋臂開關管直通而設置的一個時間段。隨著DAB變換器向高頻化發(fā)展,死區(qū)效應會更加突出。死區(qū)效應導致相位漂移、電壓極性反轉和電壓暫降等現(xiàn)象,這些現(xiàn)象造成功率傳輸模型不精確,導致移相誤差[13]。文獻[14]中死區(qū)時間設置為0.6 μs(fs=20 kHz時約為4.3°相移量),DAB的移相實際值與參考值的關系如圖4所示。當移相參考值<10°時,移相實際值與參考值始終存在約等于死區(qū)時間(4.3°)的誤差,移相誤差會導致電感電流的直流偏移。此外在“死區(qū)”范圍內,移相實際值不受控,會限制DAB變換器的動態(tài)調節(jié)能力。
2.3 非線性特性
DAB變換器的強非線性特性,對建模和控制帶來了一定的挑戰(zhàn)。DAB變換器的電感電流為純交流,傳統(tǒng)的狀態(tài)空間平均法難以用于DAB建模,一般有兩種平均建模方法來解決這個問題。第一種是消除開關頻率交流成分的降階平均模型[15-16],但是誤差較大且無法利用電感電流進行控制;第二種是增加狀態(tài)變量階數,采用全階連續(xù)或者離散模型[17-18],但是離散模型不利于進行控制器設計。
由于DAB變換器的非線性特性,在輕載時需要的控制器增益較小,在重載時需要的控制器增益較大[19]。傳統(tǒng)線性控制器,比如PI控制器,需要特定工作點的線性化小信號模型。PI控制器由于其增益固定,當變換器的輸入或者負載產生較大的變化時發(fā)生飽和,動態(tài)性能較差。此外電壓電流采樣時,ADC的采樣率有限且低通濾波器限制控制器帶寬,會影響動態(tài)響應速度。
3 動態(tài)響應的改善對策
將改善DAB變換器動態(tài)響應的對策分為兩類:第一類直接以DAB變換器的電感電流直流偏移抑制為目標;第二類是針對傳統(tǒng)線性控制的局限,以改善輸入和負載突變的動態(tài)響應為目標的改進型閉環(huán)控制器。
3.1 抑制直流偏移
3.1.1 瞬態(tài)移相調制
不同于SPS調制保持50%占空比不變,瞬態(tài)移相調制同時改變驅動脈沖的移相和占空比。文獻[20]在SPS調制的基礎上提出了非對稱式雙邊調制(asymmetric double-side modulation,ADSM)。ADSM調制方法波形如圖5所示。設移相比突增ΔD,通過調節(jié)驅動脈沖使原邊電壓Uab提前(1-x)ΔD·Ts,副邊電壓Ucd延后xΔD·Ts。移相系數x為:
(3)
調節(jié)后電感電流迅速轉換到穩(wěn)態(tài),調節(jié)時間與線路阻抗Rs大小無關。文獻[21]進一步將該方法應用到了EPS調制。基于SPS調制,文獻[22]提出的動態(tài)控制方法(fast transient control, FTC)通過單獨控制開關管S1~S8的移相比來保證伏秒平衡,可在半個周期之內消除直流偏移。但該方法需要DAB變換器電壓匹配,只考慮了能量單向傳輸的情況。還有作者提出考慮了移相比突增、突減和正/負反向四種瞬態(tài)模式的瞬態(tài)移相更新(transient phase-shift updating, TPSU)調制算法[12]3207。該算法的優(yōu)勢是可靈活運用在需要能量雙向傳輸的場合。
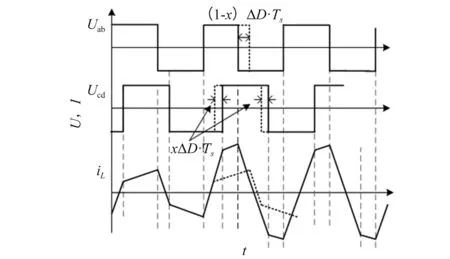
圖5 移相比增加的非對稱式雙邊調制方法波形
3.1.2 預測電感電流控制
電感電流控制具有快速響應和容易實現(xiàn)過流保護的特點。文獻[23]提出了預測電感電流控制器(predictive duty cycle mode,PDCM),使用預測方程計算移相占空比d1和d2,控制方法如圖6所示。移相比計算公式如式(4)、式(5)所示。
(4)
(5)

圖6 預測占空比控制器電流采樣點與參考點

通過電流控制使電感電流保持對稱I0=I2,變換器到達穩(wěn)態(tài)時d1=d2,因此抑制了直流偏移。該方法需要每個周期完成兩次電流采樣和占空比的計算,控制頻率是開關頻率的兩倍。為了避免在電感電流轉折點采樣帶來的噪聲影響,文獻[24]提出了中點電流模式的無差拍電流控制器(middle current mode, MCM),該方法可作用于功率傳輸在正反兩個方向切換的情況。
3.1.3 直流偏移抑制方法的比較
瞬態(tài)相移調制和預測電感電流控制都通過改變占空比可使電感電流在一個開關周期之內達到穩(wěn)定,與線路阻抗Rs的大小無關。兩種方法對比如下:
(1) 對變換器參數的敏感性。瞬態(tài)相移調制與電感L、變壓器變比等參數無關,避免了參數變化的影響。而預測電感電流控制,由式(4)可知,占空比的計算與電感L有關,一般較難獲得L的精準值, 導致一定的控制誤差。PDCM方法使用PI控制器對控制誤差進行補償,但對PI參數要求較高。
(2) 對輸入和輸出的要求。移相占空比的計算需要輸入輸出電壓保持不變。瞬態(tài)相移調制和預測電感電流控制都只適合輸入輸出連接電壓源的情況,DAB變換器工作按電流源模式傳輸功率。
抑制直流偏移的特點如表1所示。MCM控制方法可以工作在功率雙向變化的場合,且設計了死區(qū)補償和參數自動補償算法,因此具有更好的控制效果。
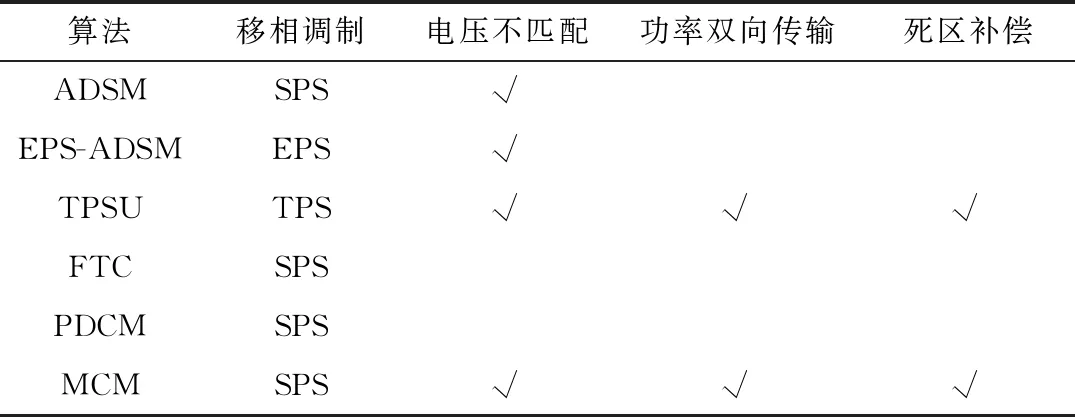
表1 抑制直流偏移的控制方法
3.2 改進的閉環(huán)控制器設計
DAB變換器的動態(tài)性能主要取決于閉環(huán)控制器的設計。改進方法主要分為線性電壓控制器、負載電流前饋控制、功率控制和模型預測控制。
3.2.1 線性電壓控制器
傳統(tǒng)PI電壓控制結構簡單,但動態(tài)性能較差。文獻[25]提出了自適應PI增益控制器,根據不同的工作點D自動調節(jié)增益,提升了負載突變時的動態(tài)性能。文獻[26]提出了魯棒PI控制,利用線性矩陣不等式(LMI)來計算PI控制器的增益,該方法在工作點D發(fā)生較大范圍變化時能獲得更小的超調和動態(tài)響應時間。文獻[27]提出了基于LMI的線性二次型調節(jié)器控制方法,也可提高負載突變動態(tài)響應速度。然而在這些方法都比較復雜,且DAB變換器的動態(tài)響應僅由負載瞬態(tài)變化時的電壓誤差決定,因此對輸入和負載突變的動態(tài)響應能力提升有限。
3.2.2 負載電流前饋控制
變換器負載發(fā)生突變時,輸出電壓不會發(fā)生突變,但負載電流可以迅速反應負載的變化情況,因此引入負載電流前饋控制可以有效改善DAB變換器的負載突變動態(tài)響應。分為以下三種方法。
(1) 文獻[28]基于諧波模型利用負載電流io計算前饋移相比Df,與PI外環(huán)的補償移相比相加后作為SPS調制的移相比D。作者引入了死區(qū)補償來減輕移相誤差,負載突變時輸出電壓調節(jié)時間從3.5 ms縮短至1 ms。移相占空比Df與io的關系通過式(6)計算。
(6)
式中:io為負載電流;Df為前饋移相比;ω為開關角頻率。

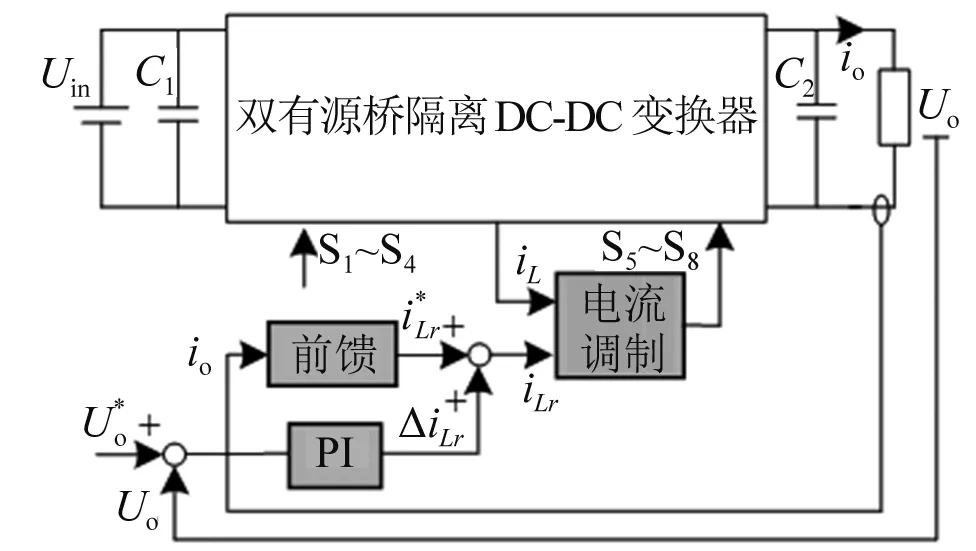
圖7 電感電流調制的負載前饋控制框圖
(3) 使用高速AD進行電流采樣會增加成本,且低通濾波器會減小環(huán)路帶寬降低動態(tài)響應速度。文獻[30]設計了非線性擾動觀測器來估計負載電流并進行前饋控制,引入死區(qū)補償減小電流估計誤差。文獻[31]提出了使用降階比例積分觀測器的負載電流前饋方法,觀測器的電流估計精度可高達98%。兩種方法都使用觀測器估計負載電流,結合負載電流前饋實現(xiàn)了快速負載突變動態(tài)響應。
負載電流前饋可以顯著改善負載突變的動態(tài)響應,不過由于受輸出濾波器時間常數的影響,輸出電壓波動無法完全消除,且不能抑制輸入電壓突變的影響。上述三種負載電流前饋控制對比如下。
(1) 諧波模型負載電流前饋需要查表,難以使用DSP等微處理器在線計算。
(2) 引入電感電流控制內環(huán)具有更高的響應速度,但需對電感電流、輸出電流和輸出電壓采樣,成本有所上升,且對電感電流采樣非常敏感。
(3) 使用電流觀測器可以省去電流傳感器,該方法成本較低,但要保證觀測器電流估計精度需要比較復雜的設計,且會加重控制器的運算負擔。
3.2.3 功率控制
直接功率控制(direct power control, DPC)由瞬時功率理論和直接轉矩控制的思想結合發(fā)展而來,廣泛應用于整流器和逆變器中。由式(1)可知,假設Uin和Uo在一個控制周期內不變,瞬時傳輸功率P僅與移相比D有關。因此保證輸出功率不變,負載一定時,輸出電壓也能保持穩(wěn)定。文獻[32]將該方法用于DAB變換器,移相比D為:
(7)
式中:p*為功率指令。試驗顯示,輸入電壓跳變時該方法的輸出電壓基本沒有波動。
文獻[33]結合DPC和前饋控制,提出了虛擬直接功率控制(virtual direct power control,VDPC),該方法需要同時采樣Uin、Uo和io。功率指令p*為:
(8)
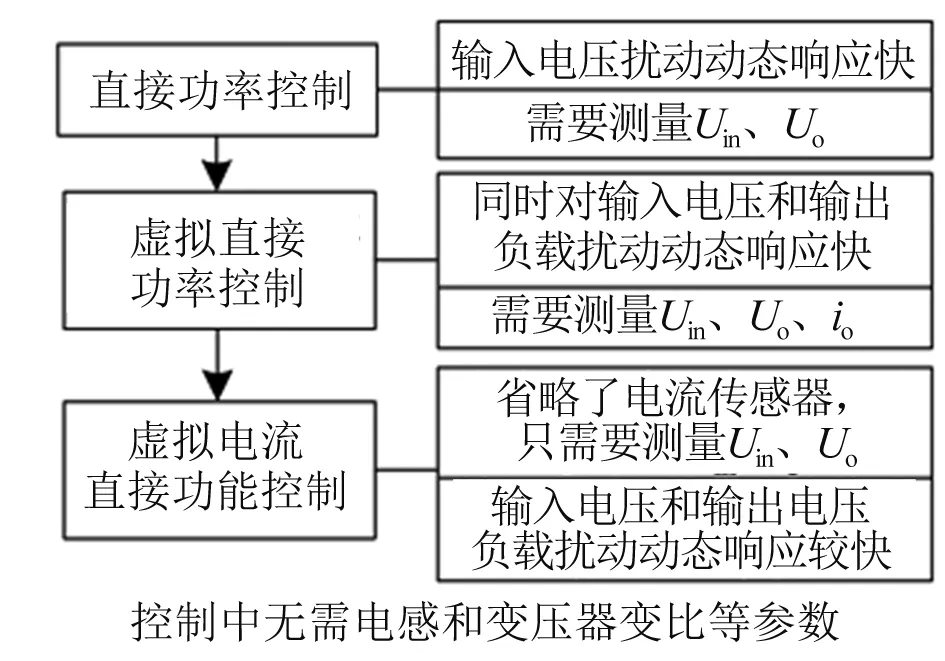
圖8 功率控制方法的聯(lián)系與特點

功率控制方法的聯(lián)系與特點如圖8所示。從式(7)可知,功率控制方法的計算中無需電感和變壓器變比等參數,因此避免了參數誤差的影響。
3.2.4 模型預測控制
模型預測控制(model predictive control,MPC)是一種非線性控制算法,擁有易于增加約束、魯棒性強和動態(tài)響應快等優(yōu)勢。隨著微處理器計算性能的提升,MPC逐漸被應用到電力電子變換器中。
文獻[35]提出了基于動態(tài)矩陣控制(dynamic matrix control, DMC)的模型預測控制,DMC能夠根據系統(tǒng)的階躍響應對變換器進行控制,無需復雜的建模過程。但是由于DMC控制算法計算量較大,在高頻時可能出現(xiàn)算力不足。文獻[36]在SPS調制的基礎上提出了一種模型預測控制算法,在輸入和負載變化時其輸出電壓幾乎沒有波動,擁有非常顯著的動態(tài)響應能力。文獻[37]使用離散狀態(tài)有限控制集(moving discretized control set,MDCS)模型預測控制用于提升負載突變動態(tài)響應,取得了良好的控制效果。同時比較了算法的運算速度,該算法運算時間為17.4 μs,相比50 μs的控制周期(20 kHz),有足夠的時間來完成采樣、通信和濾波等其他功能,算法運算速度較快。
3.2.5 改進型閉環(huán)控制器的比較
VDPC與MDCS-MPC試驗結果顯示在輸入電壓和輸出負載突變時,其輸出電壓基本沒有波動,具有最好的控制效果。改進的閉環(huán)控制方法的對比如表2所示。對比結果如下:
(1) 負載電流前饋控制對負載擾動時的動態(tài)響應改善效果明顯,但是無法對輸入擾動獲得較好的效果。
(2) 功率控制方法與系統(tǒng)的參數無關,DPC對輸入電壓擾動具有很強的抑制效果,而VDPC同時在啟動速度,輸入電壓輸出負載突變等情況都具有較好的動態(tài)調節(jié)能力,提升全面。
(3) 非線性控制的MPC具有較好的性能,控制參數可以適應較大的工作點范圍,但傳統(tǒng)MPC對模型精度要求高,且控制器的結構比較復雜,在高頻場合可能面臨控制器算力不夠的問題。

表2 改進的閉環(huán)控制方法的對比
4 結束語
DAB變換器的動態(tài)響應性能是其能否在儲能系統(tǒng)、電力電子變壓器和電動汽車等領域應用并發(fā)揮其優(yōu)勢的關鍵。本文梳理了直流偏移、死區(qū)效應和非線性特性等影響DAB變換器動態(tài)響應性能的因素,并對各種改善對策進行了對比分析,這些方法可以有效改善動態(tài)性能,但控制策略還存在較大的優(yōu)化空間,未來控制算法可以向以下方向發(fā)展。
(1) 向控制算法集成及智能算法發(fā)展。分析可知,各種改善動態(tài)響應的對策都具有一定的局限性,未來可集成不同的控制方法,發(fā)揮各自算法的優(yōu)勢。例如文獻[38]將直接功率控制和滑模控制相結合,在簡化了滑模控制器設計的同時顯著改善了DAB變換器動態(tài)性能。另外隨著微控制器的運算性能提升,神經網絡和深度學習等智能算法的在線應用成為可能,可針對DAB變換器在不同場景的應用,對系統(tǒng)的運行數據進行分析學習,優(yōu)化控制規(guī)則,進一步改善動態(tài)性能。
(2) 向多個控制目標發(fā)展。高效率和高動態(tài)響應是DAB最重要的兩個控制目標。目前改善動態(tài)響應的方法多以SPS調制為基礎,只有一個控制變量缺乏靈活性,可將動態(tài)控制算法推廣到擁有更多控制變量的EPS、DPS或TPS等調制方法。文獻[39]將模型預測控制應用至EPS調制,提高了DAB變換器的效率和動態(tài)性能。將動態(tài)控制算法結合效率優(yōu)化策略實現(xiàn)效率和動態(tài)響應的聯(lián)合優(yōu)化,可更大程度發(fā)揮移相控制的潛能。
(3) 向提高算法的效率發(fā)展。隨著SiC、GaN等寬禁帶半導體器件的應用,DAB變換器向著高頻化發(fā)展,但更高的頻率會帶來更高的處理器算力要求,要求高計算效率的控制算法。目前如MPC等算法在線計算效率相對較低,導致控制速率降低,而離線查表法由于保存的是離散的工作點,在一些場景比如連續(xù)負載轉換的時候準確度下降。文獻[40]提出一種Parabolic Carrier的方法與直接功率控制策略結合,使DSP可以不用進行開平方根運算,有潛能運用在基于寬禁帶半導體的DAB變換器上。通過對算法復雜度的優(yōu)化,可以提高計算效率,節(jié)約內存容量,使用更便宜的控制器節(jié)約成本。
(4) 向能量雙向傳輸動態(tài)控制算法發(fā)展。在電力電子變壓器、V2G和儲能系統(tǒng)等應用中都要求能量的雙向傳輸。目前的動態(tài)控制策略大多只分析能量單向流動的情況,沒有分析能量雙向傳輸時的變換器動態(tài)性能。因此,有必要在研究控制方法的時候考慮能量雙向切換的場景,分析能量正負切換的動態(tài)響應性能。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
