撿拾輸送集草機設計與試驗研究*
2021-09-23 14:05:32張麗張寧孟玉剛包德勝郭喜燕王聰偉
中國農機化學報 2021年9期
張麗,張寧,孟玉剛,包德勝,郭喜燕,王聰偉
(中國農業機械化科學研究院呼和浩特分院有限公司,呼和浩特市,010010)
0 引言
隨著我國“糧改飼”農業結構調整的深入推進,飼草料種植規模逐漸加大,產業迅速發展。隨之,對飼草料收獲機具的需求也日益增加。摟草機是傳統的牧草收獲機具之一[1]。目前國內外廣泛采用的是指輪式摟草機和水平旋轉摟草機[2]。國外指輪式摟草機代表性的機型有約翰迪爾WR10系列摟草機、法國庫恩SR100GⅡ/SR300/SR600GⅡ系列快速摟草機、凱斯—紐荷蘭WR、WRX系列指輪式摟草機,水平旋轉摟草機典型機型有法國庫恩GA系列摟草機、德國CLASS公司LINER系列摟草機[3]。國外機型種類較多,系列化程度高,自動化水平高,電、液控制系統技術成熟[4]。國內有劉建福、李正陽、賈紅超等人研發的指輪式摟草機[5],李明珍、杜韌研發的水平旋轉摟草機[6-7]以及中國農機院呼和浩特分院研發的指輪式摟草機和5.3/6.0型水平旋轉摟草機[8-9]。國內摟草機系列化程度低、地面仿形功能較差,設備的可靠性較低,收集后的牧草花葉損失較多,牧草營養價值較低。
針對我國牧草摟集技術現狀以及市場需求,中國農機院呼和浩特分院在“十三五”國家重點研發計劃項目中研制了一種新型的牧草收集機具——9JSC-7.0型撿拾輸送集草機,其優點在于對草皮的破壞小、牧草的花葉損失少,最大程度保持牧草的營養價值,其強大的地面仿形功能可隨地面起伏。
1 總體結構及工作原理
1.1 總體結構
9JSC-7.0型撿拾輸送集草機由機架、左(右)側輸送機構、左(右)側撿拾機構、行走輪、仿形浮動機構、液壓系統、左(右)擋草板以及滑掌等組成。總體結構如圖1所示。機架上裝有升降油缸、折疊油缸等,從上往下看機架呈T型布置[10]。左、右側輸送機構分別置于機架兩側,左、右側撿拾機構分別位于左、右側輸送機構前方,仿形浮動機構掛接在左、右側輸送機構的底部,保證機器對地面的仿形功能和減震能力。滑掌安裝于撿拾機構后面下端,防止撿拾器與地面硬性接觸,可對撿拾機構起到保護作用。機架與拖拉機掛接,拖拉機動力輸出軸與液壓泵連接,液壓泵帶動整個液壓系統運行。
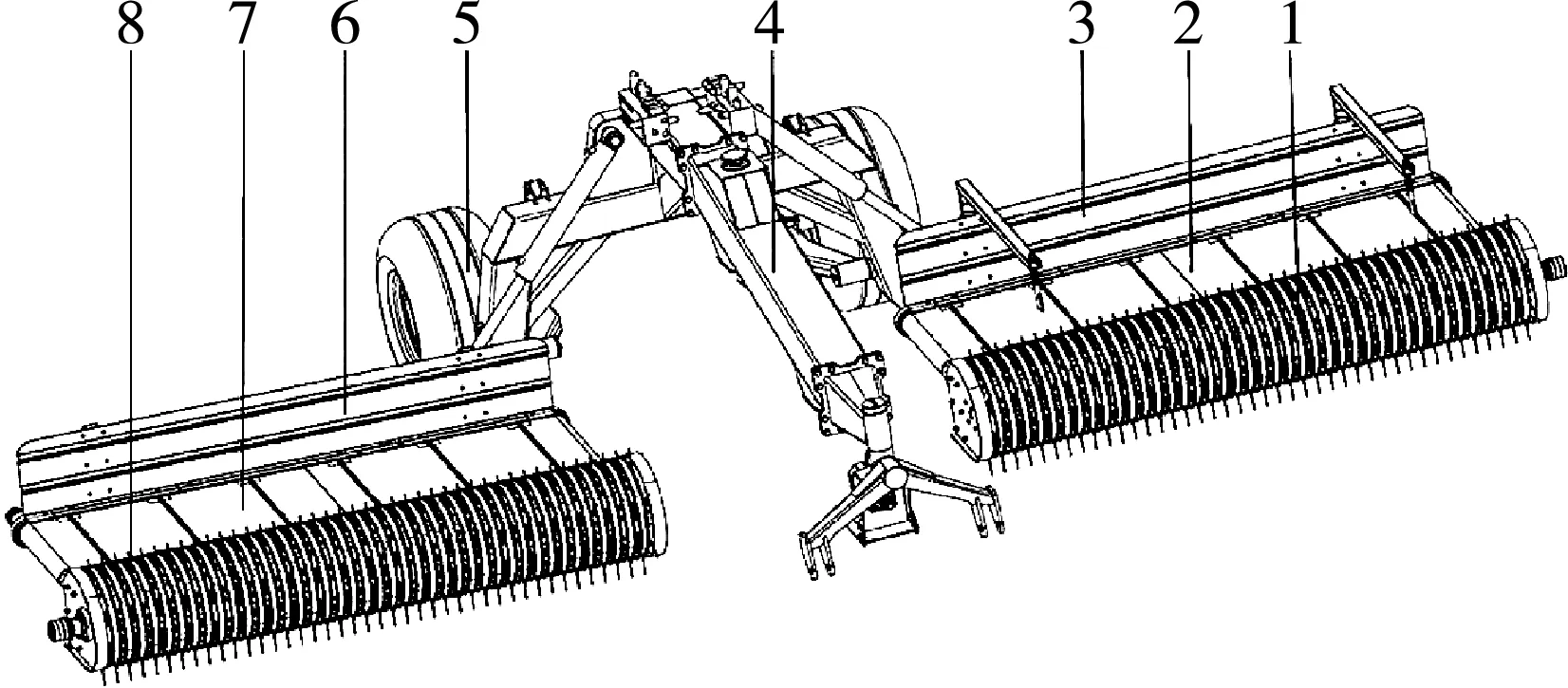
(a) 軸側圖
9JSC-7.0型撿拾輸送集草機的主要技術參數,如表1所示。
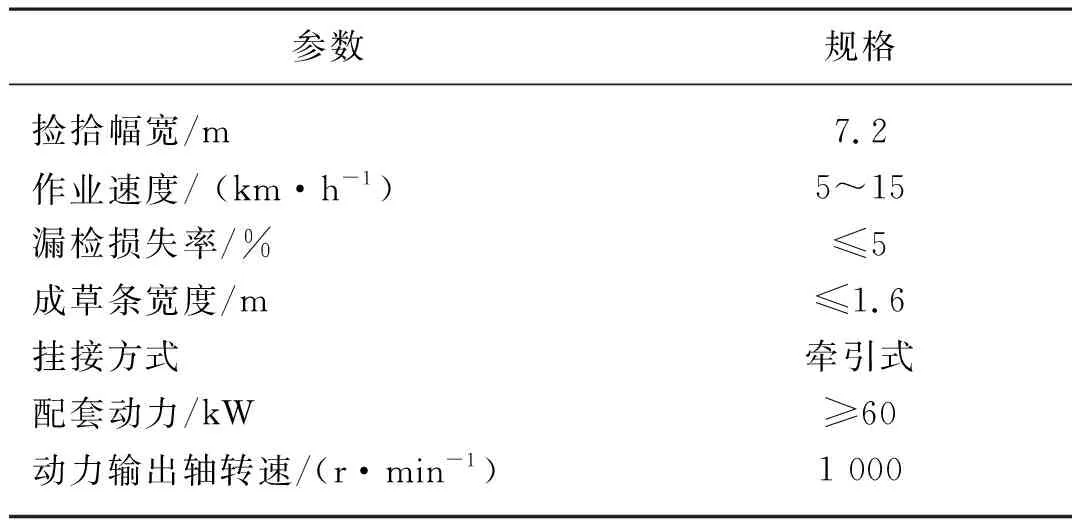
表1 9JSC-7.0型撿拾輸送集草機主要技術參數Tab. 1 Major technical parameters of grass picking and collecting machine
1.2 工作原理
作業時,拖拉機與機器牽引架掛接,拖拉機動力輸出通過PTO軸與液壓泵連接,為整個機器提供動力,拖拉機牽引機器前進。左、右撿拾馬達驅動左、右撿拾機構,將鋪放在田間的牧草撿拾,分別拋至左、右兩側輸送機構,液壓馬達驅動輸送機構,將牧草輸送至所需側,形成蓬松的草條。仿形浮動機構隨起伏不平的地面實現對地面的仿形。工作完畢后,通過液壓系統使撿拾機構和輸送機構升起,立于支撐架上方兩側,且基本與輪胎同寬,達到運輸狀態,保證運輸安全,如圖2所示。

圖2 運輸狀態
2 主要工作部件設計
2.1 機架設計
機架由牽引架、中間梁、懸掛架、右轉架以及左轉架等組成,如圖3所示。牽引架與拖拉機掛接,中間梁上裝有液壓油箱,懸掛架與行走輪連接,通過行走輪懸掛油缸調節行走輪的高度。左轉架、右轉架分別與左、右輸送撿拾機構連接,通過橫向旋轉油缸和縱向折疊油缸實現輸送撿拾機構水平旋轉和垂直方向的折疊。
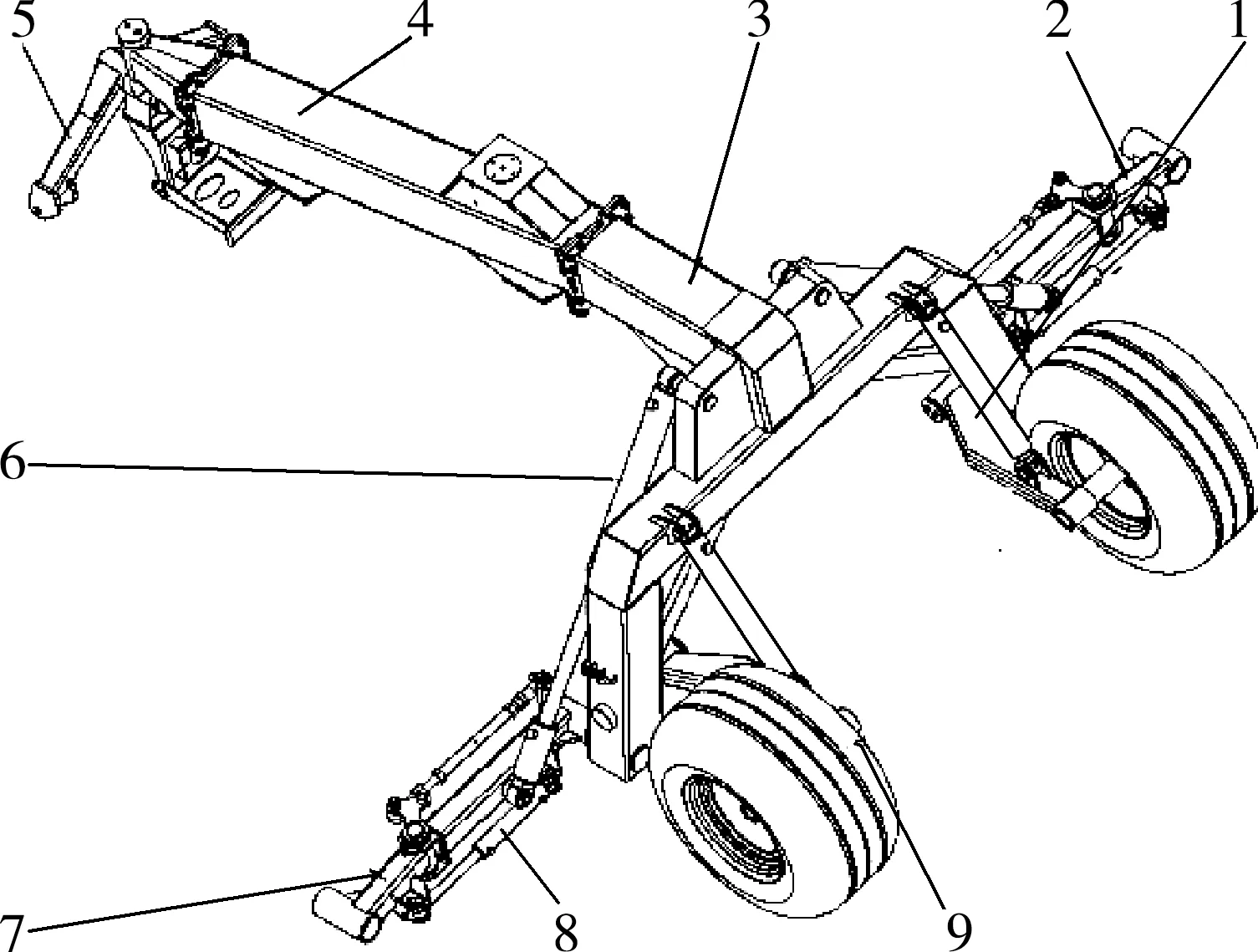
圖3 機架
2.2 撿拾機構設計
撿拾機構的結構和性能應滿足如下牧草收獲工藝要求:草條要撿拾干凈,撿拾損失率一般不應大于5%,撿拾起來的物料中陳草及其他雜質要少。彈齒對牧草的打擊要輕,牧草花、葉的損失少,要具有良好的地面仿形和緩沖性能。當草條被撿拾提升到護板、彈齒收縮到護板內部時,彈齒不應拖帶牧草[11]。
集草機上撿拾機構的結構型式是彈齒滾筒式,它主要由撿拾馬達、撿拾器側板、彈齒、彈齒護圈、撿拾器橫梁、彈齒梁和撿拾器軸等組成,如圖4所示。與方草捆撿拾壓捆機[11]上的撿拾器結構相比,該撿拾機構沒有凸輪盤。撿拾馬達驅動撿拾器軸旋轉,從而帶動彈齒撿拾草條并將草條拋送到輸送機構上[12]。

圖4 撿拾機構
撿拾機構的基本參數有撿拾幅寬、彈齒桿數量和彈齒齒端線速度。據有關資料,割草機和切割壓扁機等收獲后鋪放的草條寬度為1.2~2.4 m[13],撿拾幅寬應大于草條寬度,本集草機選擇一側撿拾機構的撿拾幅寬為2.7 m,既降低了牧草在撿拾機構兩側的漏檢率,又提高了撿拾機構的適用范圍。
機器作業速度一般小于或等于撿拾器彈齒端點的線速度[2],彈齒在撿拾牧草時理論上作勻速圓周運動,其線速度
(1)
式中:V——彈齒的線速度,m/s;
R——彈齒端點回轉半徑,選擇R=317 mm;
N——撿拾機構滾筒轉速,r/min。
取集草機的作業速度v=6.48 km/h=1.8 m/s,彈齒線的速度

彈齒齒端線速度
2.3 輸送機構
輸送機構位于撿拾機構后方,主要由輸送馬達、輸送帶以及輸送架等組成,如圖5所示。它的功能是將撿拾機構拋送上來的牧草輸送至地面。輸送機構上裝有擋草板,保證撿拾機構拾起的牧草全部落到輸送帶上。通過控制輸送馬達,可驅動輸送帶不同方向的輸出,從而實現四種不同的草條鋪放位置,如圖6所示。
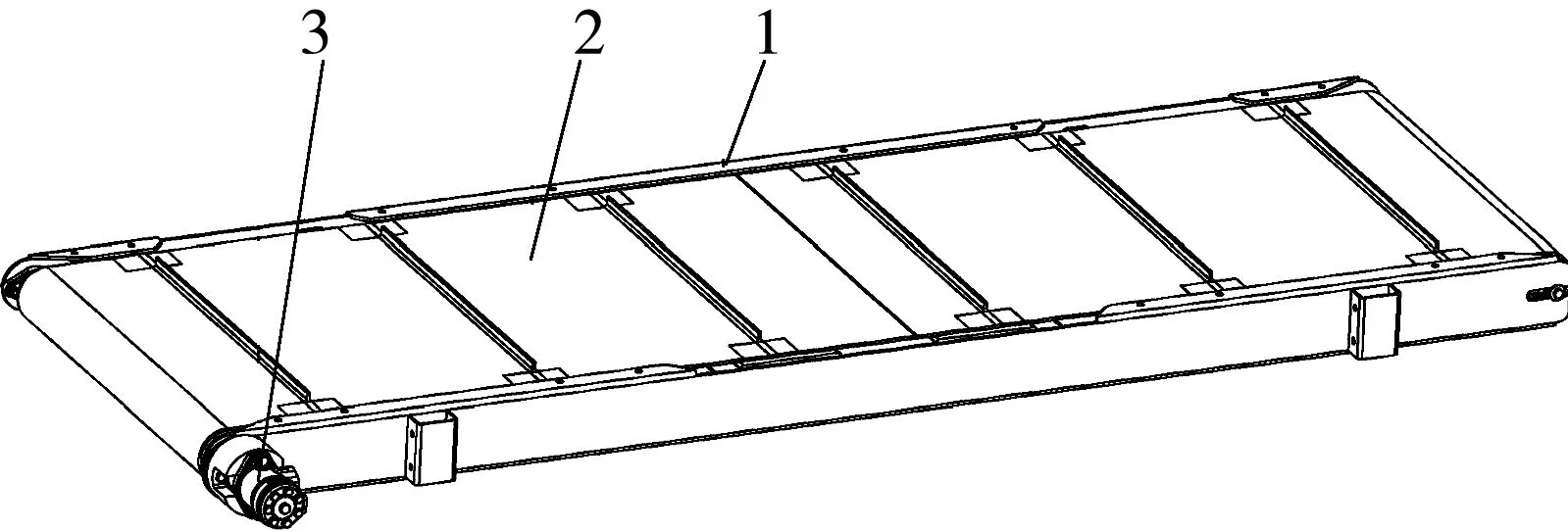
圖5 輸送機構

(a) 中間集草 (b) 右側集草
輸送機構采用橡膠輸送帶,其輸送能力與輸送帶寬和輸送速度有關,關系如式(2)所示。
Q=B2KdKvKβVγ
(2)
式中:Q——輸送能力,t/h;
Kd——斷面系數,取145;
Kv——速度系數,輸送速度≤1.6時,取1;
Kβ——傾角系數,平行帶時,取1;
V——輸送帶速度,m/s,輸送苜蓿的速度為1~3.15,選1.6 m/s;
γ——物料單位容積質量,t/m3,取0.05。
當前,我國普遍使用的割草機收獲人工種植苜蓿時,其草條質量為2.5~4 kg/m之間,收獲時牧草含水率為40%左右,取機器作業速度為1.8 m/s,撿拾機構輸送至輸送機構的牧草量為4.5~7.2 kg/s。由式(2)推導得出
所以選取輸送帶寬度為0.8 m。
2.4 仿形浮動機構
影響集草機撿拾效果的重要因素之一是撿拾機構的彈齒與地面之間的離地間隙。仿形浮動機構能夠在起伏不平的地面條件下使彈齒與地面間保持應有的間隙[15],保證機器良好的仿形能力和撿拾效果。仿形浮動機構是由仿形輪、浮動架、浮動彈簧、浮動軸以及調節塊等組成[16],如圖7所示。
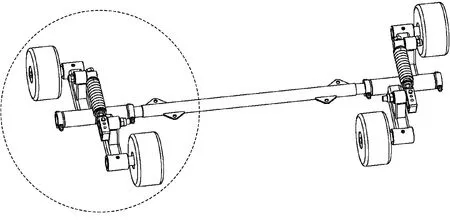
(a) 機構整體圖
2.5 液壓系統設計
液壓系統是集草機非常重要的一部分,主要包括液壓泵、撿拾馬達、輸送馬達、橫向旋轉油缸、縱向折疊油缸、貼地懸掛油缸以及行走輪懸掛油缸等,液壓泵是液壓系統的核心元件[17],如圖8所示。
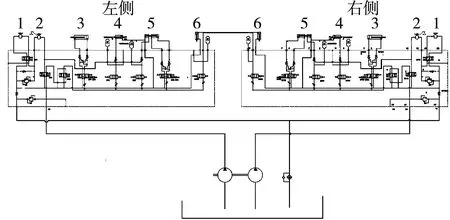
圖8 液壓系統圖
液壓泵與拖拉機動力輸出軸連接,為整個液壓系統提供動力,撿拾馬達驅動撿拾機構撿拾牧草并拋送至輸送帶上。輸送馬達驅動輸送機構將物料輸送至地面,通過調整馬達轉向可以改變輸送帶的輸出方向。橫向旋轉油缸將機器的一側沿水平方向旋轉90°。縱向折疊油缸可將機器的一側提升并垂直旋轉90°,達到運輸狀態。作業前,行走輪懸掛油缸可將機器調整至離地合適的位置,達到最佳作業狀態。后輪懸油缸可將兩個行走輪提升,便于運輸。
3 試驗研究
3.1 試驗條件
試驗前,試驗樣機進行試運轉,達到正常工作狀態,試驗期間機器工況應保持穩定;試驗場地滿足各項試驗的要求,備有可靠的消防設施。環境風速不應大于4 m/s,環境空氣的相對濕度應不大于30%。試驗用儀器、儀表應經檢驗合格,并在檢定有效期內。試驗條件[18]如表2,滿足試驗要求。
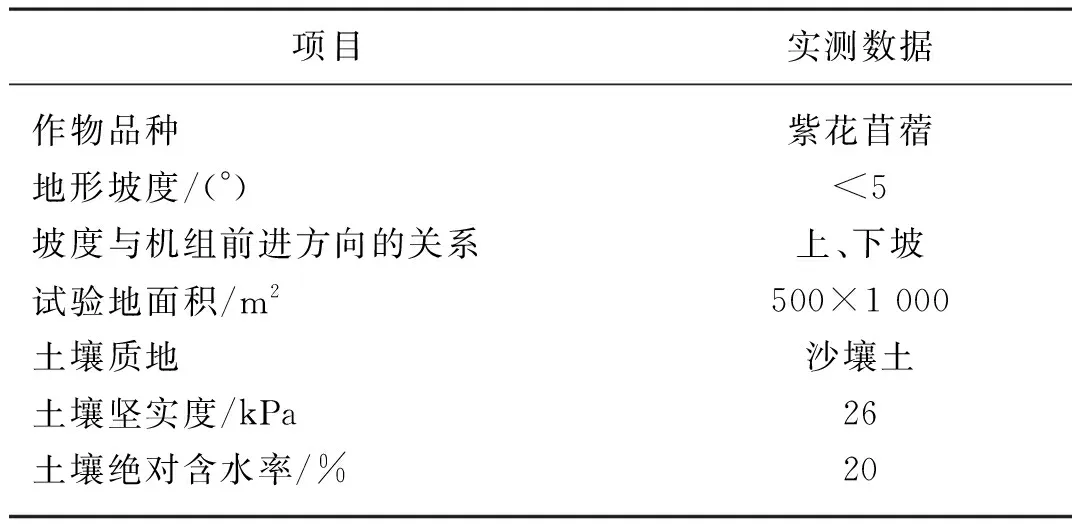
表2 試驗條件Tab. 2 Table of experiment condition
依據《GB/T 14247—2015摟草機試驗方法》[19]以及《JB/T 10905—2008旋轉摟草機》[20]的規定對機器進行性能試驗及檢測。作業對象為田間晾曬數日的苜蓿,其含水率為40%左右。9JSC-7.0型撿拾輸送集草機由60 kW以上拖拉機牽引,動力輸出軸轉速為1 000 r/min。
3.2 性能試驗
試驗前按文獻[18]的規定劃分試驗區,對樣機進行了試運轉和調試,并將樣機調整到最佳狀態。在機器正常工作狀態下進行性能試驗,主要進行撿拾幅寬、草條密度變異系數、漏撿損失率以及成草條寬度的測定,并對測定結果進行分析。田間試驗照片如圖9所示。

圖9 田間試驗
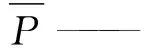
3.2.1 草條密度變異系數
草條密度變異系數是衡量草條鋪放質量的重要指標。在試驗現場對各測定點選定長度為1 m的草條,用斷面測定儀測定2個端面的表面形狀和底寬,求出平均斷面面積和平均高,然后截取該段草條稱量,用式(1)~式(4)計算草條密度、標準差及草條密度變異系數。測定結果如表3。
(1)
式中:Pt——各測點的草條密度,kg/m3;
mt——各點的每米草條質量, kg/m;
Ft——各測點的斷面積,m2。
(2)
n——測定點數。
(3)
式中:S——草條密度標準差,kg/m3。
(4)
式中:Vt——草條密度變異系數。
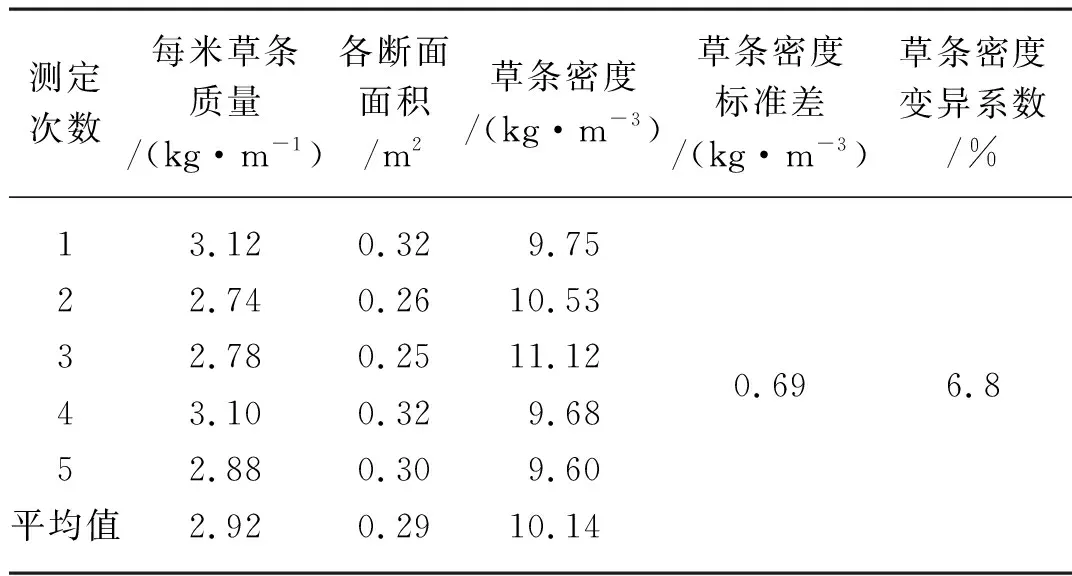
表3 草條密度變異系數測定表Tab. 3 Variation coefficient of windrow uniformity
3.2.2 漏撿損失率
漏撿損失率是衡量集草機工作效率的重要指標。試驗時,在每一測定行程取5 m,分別將集草機通過區域內未撿到的且長度大于7 cm的牧草稱重,按式(5)計算漏撿損失率。測定結果如表4,由表4可知,該機漏檢損失率為3.7%,低于文獻[20]中規定的漏檢損失率小于5%的技術指標。測定結果如表4。
(5)
式中:B——漏撿損失率,%;
m1——所測各行程5 m內漏撿的牧草質量之和,kg;
m2——所測各行程5 m內牧草質量之和,kg。
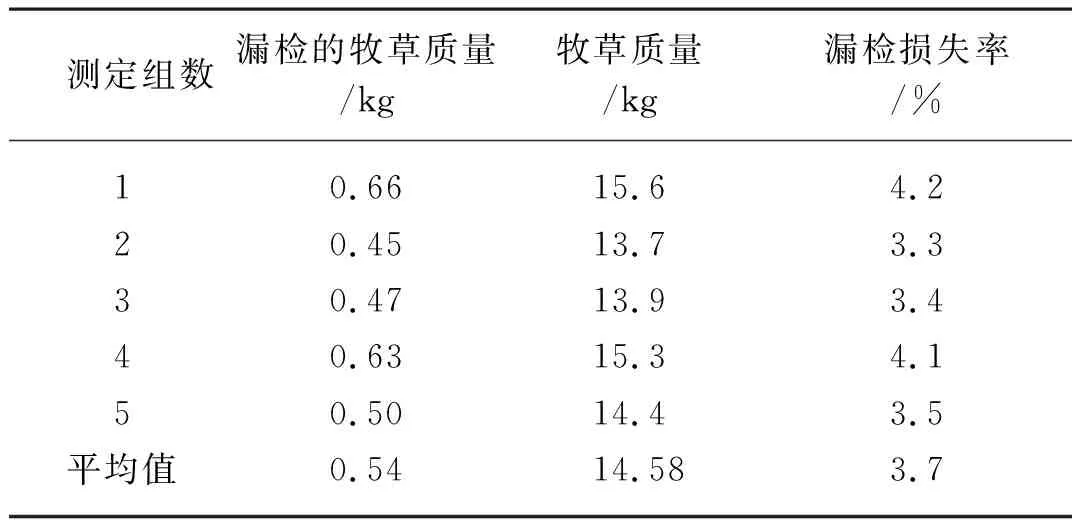
表4 漏檢損失率測定表Tab. 4 Table of the loss rate of pickup strips
3.2.3 成草條寬度
試驗時,在各個草條間隔均勻取3點,作業后測量形成草條的寬度,求取平均值。測定結果見表5。
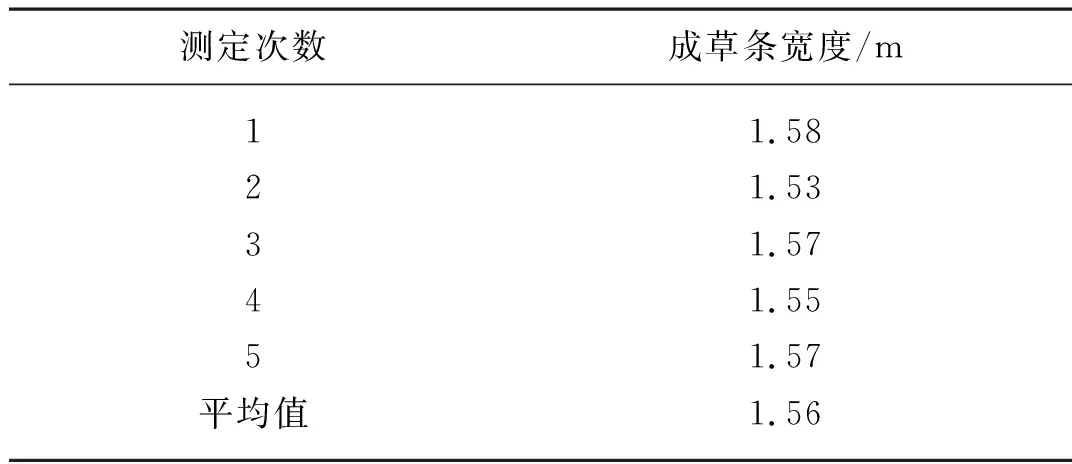
表5 成草條寬度測定表Tab. 5 Table of windrowers width
集草機田間試驗檢測結果匯總表如表6。
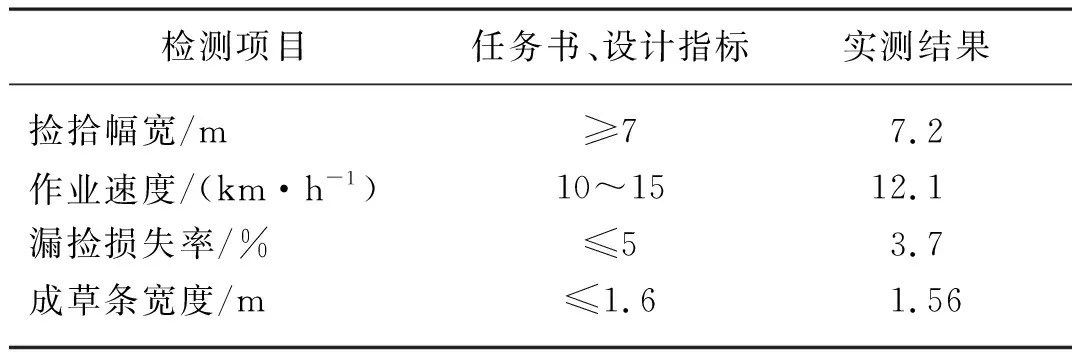
表6 檢測結果匯總表Tab. 6 Summary table of experiment results
從試驗檢測結果可以看出,撿拾幅寬為7.2 m,作業速度為5~15 km/h,漏檢損失率低;形成的草條蓬松,密度均勻;機具工作穩定、其各項技術指標均達到項目任務書和設計的要求。
4 結論
1) 9JSC-7.0型撿拾輸送集草機是“十三五”國家重點研發計劃項目中研發的新產品,本文闡述了其總體結構和工作原理,滿足我國飼草料機械化收獲的發展需求。
2) 介紹了9JSC-7.0型撿拾輸送集草機的機架、撿拾機構、輸送機構、仿形浮動機構、液壓系統等主要工作部件的結構。
3) 苜蓿田間試驗及性能檢測表明:撿拾幅寬為7.2 m,作業速度為5~15 km/h,漏檢損失率為3.7%,機具工作穩定可靠,各項技術指標達均到了項目任務書和設計的要求。