基于高分辨率遙感影像的交通流參數提取
2021-09-23 00:47:20婁文,郭杜杜
交通科技與管理 2021年22期
婁文,郭杜杜





摘 要:利用面向對象方法,研究了如何提取車輛信息,并進一步提取交通流參數。首先,對圖像進行增強處理,其次選取合適的分割、合并閾值進行圖像分割,然后根據車輛的特征信息制定規則,依次提取車輛信息,最終獲取交通流參數。試驗證明利用面向對象方法可以實現對遙感圖像中的車輛信息的提取,并且能夠獲取交通密度、道路空間占有率、車速及交通量參數,是對高分辨率遙感影像提取交通信息的有益探索。
關鍵詞:高分辨率遙感;面向對象;車輛檢測;交通流參數
0 引言
隨著高分辨率影像的使用范圍越來越廣,高光譜影像使得定量分析地物成分成為可能,高分辨率影像則使得提取地物信息、制作大比例尺地圖成為可能[1]。遙感圖像質量不斷提高、成像覆蓋面積擴大,可以大范圍地檢測路網信息和車輛信息,以解決出現的交通問題,評價道路規劃及安全情況等。
1 車輛信息提取
在進行車輛提取前,依然通過2%線性增強方法,提高車輛與道路的對比度,為車輛提取做準備。利用軟件完成車輛提取,首先,在選擇數據時,除了載入圖像數據,還需在掩膜文件選項中,選擇之前提取到的道路矢量數據,限制車輛提取的區域范圍,以便減少工作量和提高提取的精度。
1.1 圖像分割與合并
通過實時預覽觀察圖像分割與合并效果,選擇分割閾值為78,選擇合并閾值為45。
1.2 車輛特征提取
對車輛提取時,分別描述明車與暗車的特征,特征描述如下:
(1)對明車進行提取,主要利用光譜均值信息,設置光譜均值范圍為大于1 285,經預覽可知,能夠提取出明色車輛。
(2)對暗車進行提取,主要利用光譜均值信息及面積。設置光譜均值范圍為小于1 000,同時限制面積范圍為5.6~35.0。
1.3 車輛特征提取
分別利用兩條規則對車輛進行提取,最終結果如圖1所示。
1.4 精度評價
經目視判讀可得,該路段上車輛數為20,其中明色車輛數為12,暗色車輛數為8。將面向對象車輛提取結果與目視結果相對比,繪制了面向對象車輛提取結果精度評價表,如表1所示。由此可知,該試驗利用面向對象的車輛提取方法,總體的正確率與檢測率較高,提取效果好。
2 交通流參數獲取
2.1 交通密度
本試驗中的道路共有兩條路段,即由南向北路段和由北向南路段。由道路信息及車輛數可計算得到試驗區的交通密度,如表2所示。
2.2 道路空間占有率
根據車輛檢測試驗結果,從中可以得到車輛的長度信息,相應可以獲取道路空間占有率,如表3所示。由表可知,該試驗區道路空間占有率較小,說明道路上車輛較為稀疏。
2.3 車輛提取
在試驗區域內,車輛總數為20,車輛總長度為103.84 m,經計算可得平均車輛長度為5.192 m。在該道路阻塞路段,觀察到阻塞車輛間的距離,如表4所示,可知該道路上阻塞時的同車道車輛間的平均距離為1.373 m。由阻塞密度與平均車頭間距的關系式,計算得到道路的阻塞密度為152.3輛/km。
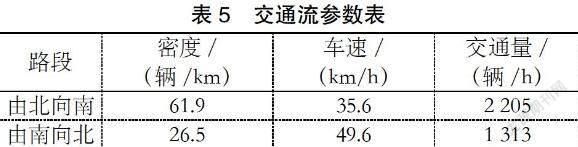
經查閱資料,該道路暢行速度約為60 km/h。由格林希爾茲提出的速度-密度線性關系模型以及交通流三要素的基本關系,最后估算獲得的交通流參數如表5所示。
3 結束語
隨著高分辨率遙感圖像質量的提高,利用遙感圖像提取道路和車輛信息,獲取交通流參數及其他交通信息,進而應用于城市交通的合理規劃和評價變得越來越有可能。本文利用面向對象的圖像信息提取方法,利用wordview-2衛星數據進行試驗,從圖像中獲取了道路及車輛信息,然后通過計算獲取了交通密度、道路空間占有率且估算了車速及交通量參數,實現了利用高分辨率遙感影像對交通流參數提取。
參考文獻:
[1]韋玉春,湯國安,楊昕.遙感數字影像處理教程[M].北京:科學出版社,2013:8.
[2]鄧書斌,陳秋錦,杜會建,等.ENVI遙感圖像處理方法 第2版[M].北京:高等教育出版社,2014.10.