基于Solidworks的搬運機(jī)器人拾取機(jī)構(gòu)的運動仿真與分析
2021-09-24 08:44:49周登攀
內(nèi)燃機(jī)與配件 2021年18期
周登攀

摘要:采用Solidworks軟件,對搬運機(jī)器人拾取運動中典型的曲柄搖塊機(jī)構(gòu)進(jìn)行建模、裝配,利用Solidworks Motion模塊中添加約束、加載馬達(dá)等功能,對曲柄搖塊機(jī)構(gòu)主動件進(jìn)行運動分析,通過運動仿真,可及時顯示運動軌跡與運動參數(shù),驗證是否符合要求。該方法可為工程技術(shù)人員進(jìn)行初始設(shè)計提供參考依據(jù),對機(jī)構(gòu)的優(yōu)化設(shè)計提供可靠的基礎(chǔ),提高設(shè)計效率。
Abstract: Solidworks software is used to model and assemble the typical crank rocker mechanism in the picking motion of the handling robot, and Solidworks motion module is used to analyze the motion of the loading motor of the crank rocker mechanism active part. Through motion simulation, the motion trajectory and motion parameters can be displayed in time to verify whether they meet the requirements. This method can provide a reference for engineering and technical personnel to carry out the initial design, provide a reliable basis for the optimal design of the mechanism, and improve the design efficiency.
關(guān)鍵詞:Solidworks;拾取機(jī)構(gòu);運動仿真;運動分析
Key words: Solidworks;pick up mechanism;motion simulation;analysis
中圖分類號:TP242.2? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)18-0098-03
0? 引言
搬運機(jī)器人由于可模仿人的肢體運動、替代人類完成重復(fù)的物料輸送、傳遞等搬運功能,具有很廣泛的使用場景。設(shè)計中,可給搬運機(jī)器人安裝不同的末端執(zhí)行器來完成各種不同形狀和狀態(tài)的工件搬運,是實現(xiàn)生產(chǎn)自動化的有效途徑之一。搬運機(jī)器人主要原理是利用電機(jī)驅(qū)動執(zhí)行件進(jìn)行物料的拾取和搬運任務(wù),其各種功能需要設(shè)置拾取機(jī)構(gòu)來實現(xiàn)。靈活度高、精密度高的機(jī)械手臂是工業(yè)生產(chǎn)搬運中通常采用的機(jī)械裝備,因其控制系統(tǒng)復(fù)雜、價格高昂,在實際生活生產(chǎn)應(yīng)用中并不廣泛。
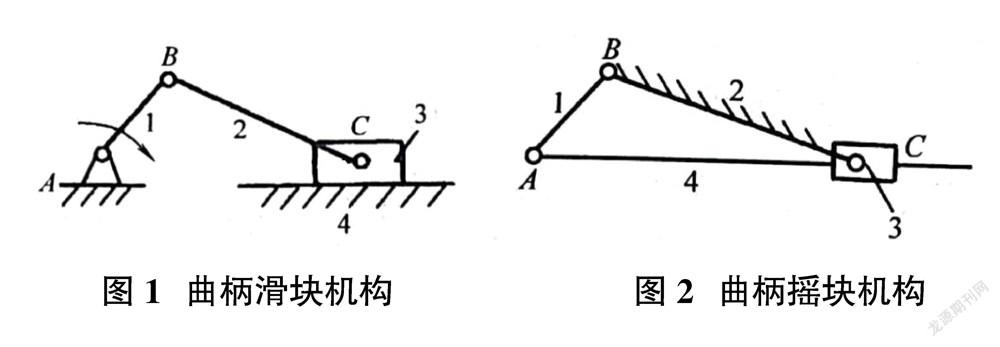
本文研究對象是基于曲柄滑塊機(jī)構(gòu)的機(jī)器人拾取機(jī)構(gòu),其結(jié)構(gòu)如圖1所示。曲柄滑塊機(jī)構(gòu)可通過曲柄和滑塊來實現(xiàn)轉(zhuǎn)動和移動相互轉(zhuǎn)換,該機(jī)構(gòu)能滿足多種運動軌跡、運動規(guī)律的要求,同時便于制造、裝配方便、工作穩(wěn)定,在傳動系統(tǒng)中廣泛使用。本文利用計算機(jī)輔助設(shè)計軟件Solidworks 2020建立曲柄滑塊機(jī)構(gòu)模型,為得到機(jī)構(gòu)的運動規(guī)律,可利用軟件的Motion模塊對拾取機(jī)構(gòu)進(jìn)行運動仿真分析。充分利用分析結(jié)果可使設(shè)計分析者及時論證機(jī)構(gòu)設(shè)計的可行性,并對產(chǎn)品的制造成本進(jìn)行控制,有效縮短產(chǎn)品開發(fā)周期。
1? 搬運機(jī)器人拾取機(jī)構(gòu)的工作原理
曲柄搖塊機(jī)構(gòu)由基于曲柄滑塊機(jī)構(gòu)進(jìn)行二次設(shè)計而成,如圖2所示。曲柄滑塊機(jī)構(gòu)中的連桿2設(shè)定為機(jī)架時,滑塊3的運動軌跡為繞C點進(jìn)行往復(fù)擺動,從而演化為曲柄搖塊機(jī)構(gòu)。曲柄搖塊機(jī)構(gòu)是具有一個曲柄和一個搖塊的平面連桿機(jī)構(gòu)。運動的轉(zhuǎn)化是將曲柄的旋轉(zhuǎn)運動通過連桿作用轉(zhuǎn)導(dǎo)為搖塊和連桿的相對滑動,或作相反的運動變換。本文中設(shè)計的拾取機(jī)構(gòu),是由機(jī)械臂(從動件AB)進(jìn)行驅(qū)動,在結(jié)構(gòu)設(shè)計部分,采用導(dǎo)桿為主動件,該機(jī)構(gòu)的運動在0°至90°范圍內(nèi)擺動。
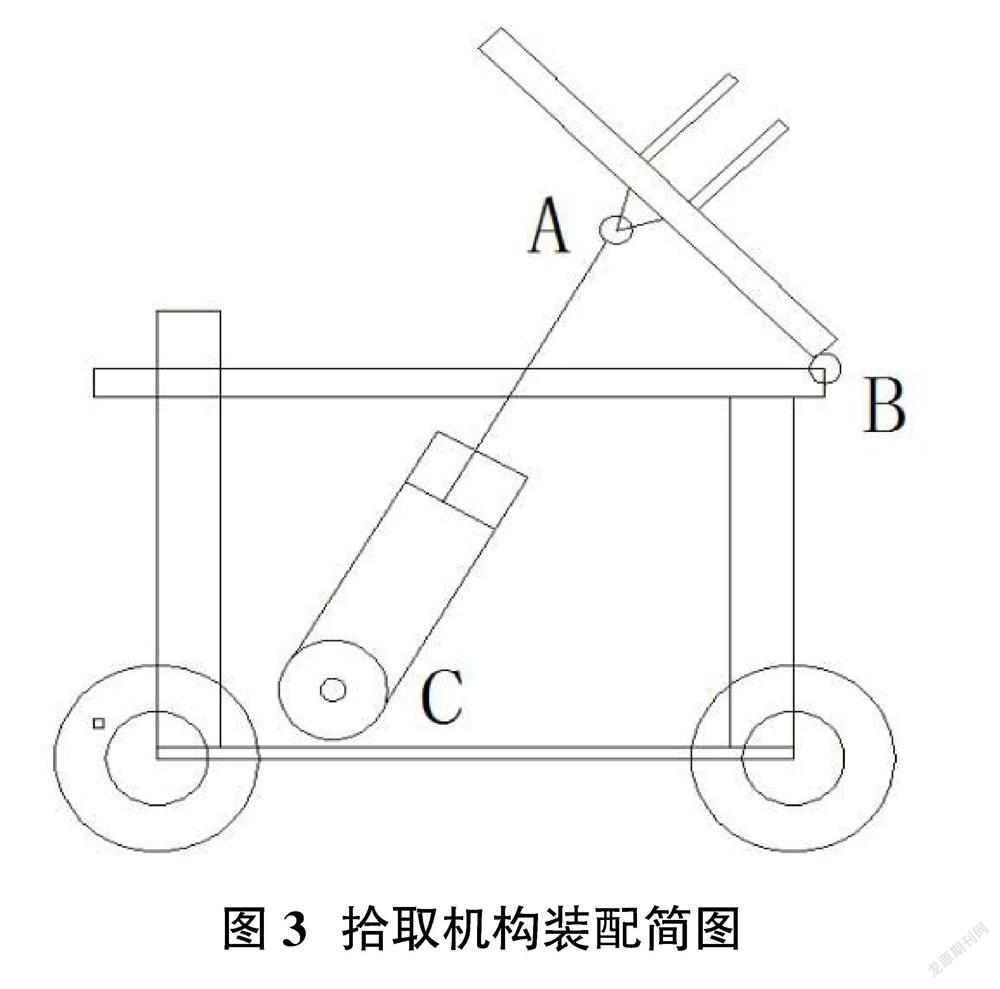
曲柄搖塊機(jī)構(gòu)是該拾取機(jī)構(gòu)的主體部分,主要由固定座、機(jī)械臂、活塞桿、活塞氣缸等幾個部分組成。其裝配簡圖如圖3所示,在機(jī)構(gòu)設(shè)計中,設(shè)計主動件導(dǎo)桿AC作為活塞桿,從動件AB設(shè)定為機(jī)械臂,擺動搖塊即為活塞氣缸。
初始狀態(tài)下,機(jī)械臂處于水平位置(此時設(shè)定為0°),隨后開始運動,氣缸中的活塞桿(主動件導(dǎo)桿AC)會作伸出運動,在活塞桿的推力下,機(jī)械臂(從動件AB)會繞固定座的B點做轉(zhuǎn)動,機(jī)械臂會在轉(zhuǎn)動過程中從水平位置旋轉(zhuǎn)至垂直位置(此時為90°),完成拾取動作,由機(jī)械臂前端的抓取機(jī)構(gòu)抓緊物品,隨后在活塞氣缸(擺動搖塊)的擺動下,使得活塞桿(主動件導(dǎo)桿AC)縮回,完成物品拾取和90°的搬運。通過運動過程可知,運用活塞桿(主動件導(dǎo)桿AC)在活塞氣缸內(nèi)的移動,導(dǎo)致機(jī)械臂(從動件AB)的轉(zhuǎn)動和移動,實現(xiàn)了機(jī)械臂對物品的拾取搬運功能,配合機(jī)構(gòu)底部滾輪可對機(jī)構(gòu)進(jìn)行移動。相比于傳統(tǒng)的電機(jī)齒輪驅(qū)動方式,具有精度高、低成本、可移動等優(yōu)點。
2? 建模與裝配
2.1 曲柄搖塊機(jī)構(gòu)的數(shù)學(xué)模型
根據(jù)裝配簡圖,建立一個曲柄搖塊機(jī)構(gòu)數(shù)學(xué)模型,如圖4所示, AB=60mm,BC=90mm,AC=100mm,BC桿固定(即機(jī)架),活塞氣缸為擺動搖塊。為便于對數(shù)學(xué)模型進(jìn)行分析,設(shè)定曲柄AB桿的轉(zhuǎn)動方向為順時針,將設(shè)定AB桿與BC桿形成夾角的啟始夾角為0°,夾角的定義為作順時針轉(zhuǎn)動的曲柄AB桿,在轉(zhuǎn)動后與BC桿所形成夾角的角度。測量的夾角的取值范圍在0°至90°。
2.2 各構(gòu)件模型的創(chuàng)建
利用Solidworks軟件對各構(gòu)件進(jìn)行建模。利用軟件繪圖功能創(chuàng)建 AB 桿、BC桿、AC桿和滑塊C的三維模型,并將AB桿上兩銷孔的中心距設(shè)置為60mm、BC桿、AC桿和滑塊上兩銷孔的中心距為 90mm、100mm。
3? 運動仿真與分析
Solidworks Motion 是Solidworks軟件里面一個重要的仿真模塊,利用模塊插件中的運動算例可以從模型進(jìn)入到仿真頁面。在對裝配體添加原動力作為驅(qū)動、添加相應(yīng)約束和作用力后,即可對裝配體狀態(tài)進(jìn)行仿真,對之前設(shè)計環(huán)節(jié)進(jìn)行驗證是否正確,從而掌握機(jī)構(gòu)設(shè)計的可行性。
3.1 曲柄搖塊機(jī)構(gòu)傳動模型
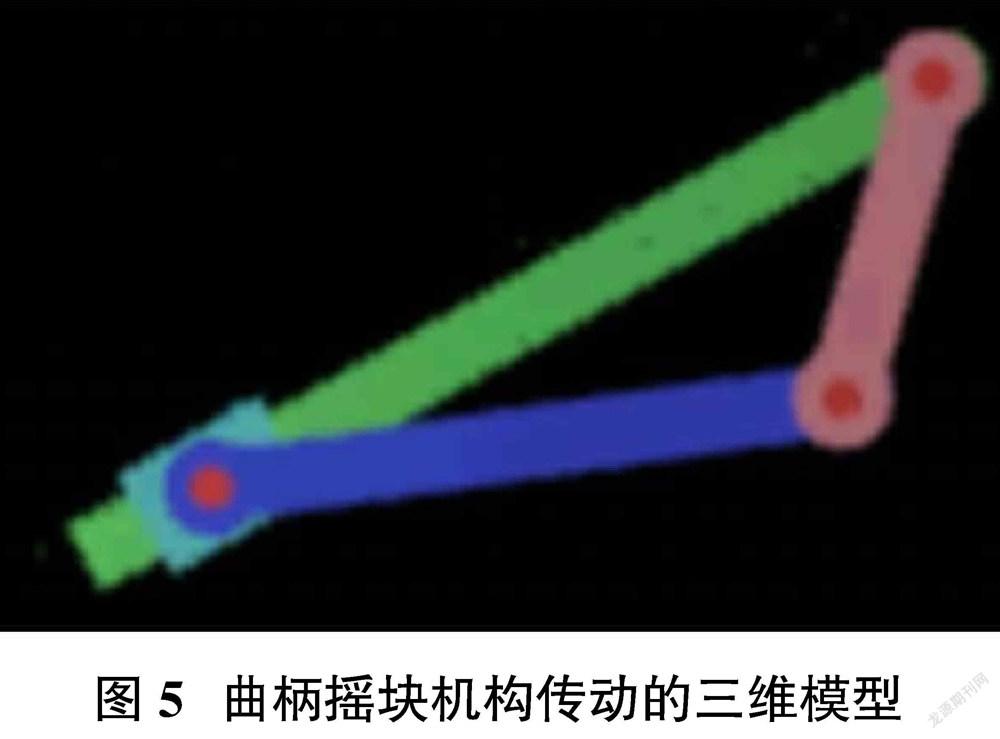
在Solidworks軟件中完成構(gòu)件的裝配體,按照配合要求,對零件圓柱銷簡化,確定各構(gòu)件之間位置關(guān)系,完成該曲柄搖塊機(jī)構(gòu)傳動的三維模型,如圖5所示。
3.2 曲柄搖塊機(jī)構(gòu)運動仿真
在軟件的拾取機(jī)構(gòu)裝配圖中,對搖塊C、AC桿及BC桿施加定位及約束,對AC桿添加“馬達(dá)”,在軟件界面左下角單擊“運動算例”,在“Motion Manager”中選擇“Motion分析”,添加引力,點擊“馬達(dá)”按鈕,在屬性管理器中設(shè)置馬達(dá)的位置、定義AC桿為主動件,設(shè)定AC桿為逆時針旋轉(zhuǎn),模擬機(jī)構(gòu)運動。設(shè)定馬達(dá)恒定轉(zhuǎn)速60r/min,完成添加配合及驅(qū)動。
3.3 曲柄搖塊機(jī)構(gòu)運動分析
AC桿的運動軌跡為在平面內(nèi)進(jìn)行往復(fù)的擺動,搖塊C的運動軌跡為繞著圓柱銷做擺動。運動分析主要是分析主動件的位移、速度和加速度,有X、Y和Z三個方向。在 Motion 插件里選擇 “結(jié)果和圖解” 命令,確定要分析計算的參數(shù)。對于需要求解的AC桿進(jìn)行分析,在“位移/速度/加速度”選項的子類別中選擇對應(yīng)的 “線性位移”、“線性速度”、“線性加速度”選項,設(shè)置運動算例屬性、運算仿真、檢查運動,可圖解顯示AC桿的位移曲線,速度曲線和加速度曲線。
3.3.1 主動件AC桿的位移分析
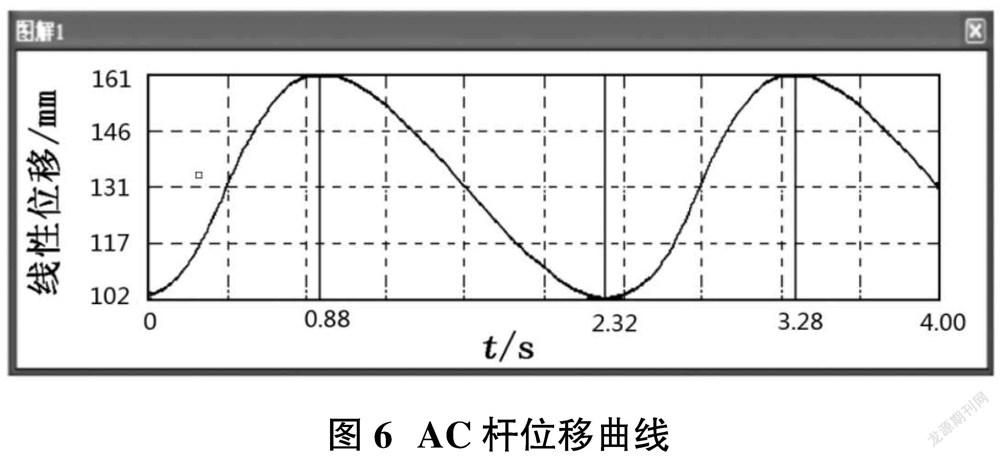
利用軟件的Motion插件進(jìn)行位移分析,可圖解顯示AC桿(主動件)位移曲線,得出AC桿位移曲線如圖6所示。拾取機(jī)構(gòu)需要有良好的運動平穩(wěn)特性,由圖分析可知,在拾取及搬運90°的運動過程中,拾取速度較慢。說明設(shè)計的拾取機(jī)構(gòu)具有良好的運動平穩(wěn)特性。
3.3.2 主動件AC桿的速度分析
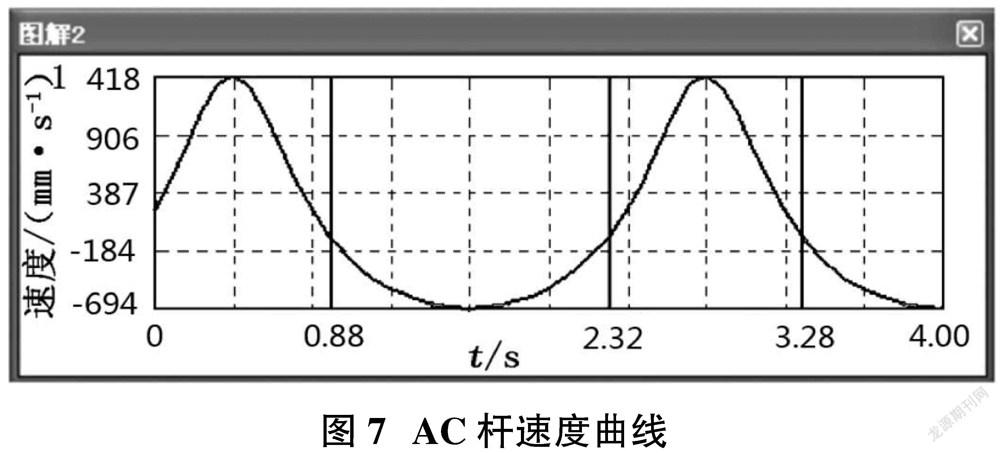
利用軟件的Motion插件進(jìn)行速度分析,可圖解顯示AC桿(主動件)速度曲線,如圖7所示,速度曲線呈完整的周期運動,在0.88~2.32s區(qū)間內(nèi),AC桿速度較慢,在2.32~3.28s區(qū)間內(nèi),AC桿速度較快。AC桿的速度曲線符合拾取機(jī)構(gòu)的運動特性要求。
3.3.3 主動件AC桿的加速度分析
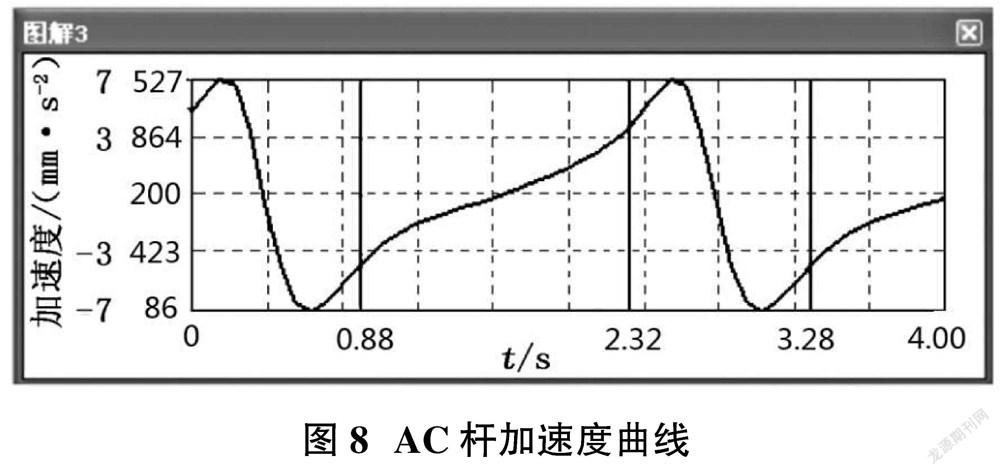
在往復(fù)、高速的運動機(jī)械中,零件強(qiáng)度及機(jī)械的工作性能往往受慣性力的影響很大,因而有必要分析主動件的加速度曲線。主動件AC桿加速度曲線如圖8所示, 2.32~3.28s區(qū)間為空行程,圖解顯示該區(qū)間段內(nèi)AC桿的加速度變化大,顯示機(jī)構(gòu)運動的急回特性;0.88~2.32s區(qū)間為工作行程,圖解顯示該區(qū)間段內(nèi)AC桿的加速度變化平穩(wěn),符合機(jī)械設(shè)備拾取物料運動。
4? ?結(jié)語
利用Solidworks軟件可快速繪制機(jī)構(gòu)三維模型并完成機(jī)構(gòu)的裝配體,Solidworks Motion作為虛擬原型機(jī)仿真工具,可幫助設(shè)計人員在設(shè)計前期判斷設(shè)計是否能達(dá)到預(yù)期目標(biāo)。本文針對搬運機(jī)器人拾取運動中典型的曲柄搖塊機(jī)構(gòu),采用Solidworks Motion模塊對該機(jī)構(gòu)進(jìn)行運動仿真分析,通過圖解掌握主動件的位移、速度和加速度曲線。Solidworks廣泛應(yīng)用于機(jī)構(gòu)的開發(fā)設(shè)計,使得機(jī)構(gòu)形象具體、直觀。通過Solidworks Motion工具,使得機(jī)構(gòu)的運動分析過程精確、高效,同時便于在產(chǎn)品設(shè)計前期通過運動仿真分析找出問題,消除傳統(tǒng)設(shè)計中的繁瑣問題。降低機(jī)構(gòu)制作成本,提高生產(chǎn)效率。使用Solidworks Motion工具相應(yīng)功能使得機(jī)構(gòu)設(shè)計的求解過程變得快捷方便,為后期優(yōu)化曲柄搖塊機(jī)構(gòu)提供基礎(chǔ)。
參考文獻(xiàn):
[1]何偉,李震,王建彬,張建華.基于鉸鏈四桿機(jī)構(gòu)運動學(xué)的解析法及ADAMS仿真[J].巢湖學(xué)院學(xué)報,2011(06).
[2]李雅昔.基于Solidworks的平面鉸鏈四桿機(jī)構(gòu)的運動仿真分析[J].機(jī)械制造與自動化,2016,45(04).
[3]王孝平,龍偉,耿靜華,陳毅.平面四桿機(jī)構(gòu)的優(yōu)化設(shè)計及運動仿真[J].機(jī)械工程師,2009(01).
[4]孫健,張豪,楊青.基于Solidworks Motion的平面四桿機(jī)構(gòu)運動分析[J].機(jī)械工程與自動化,2018(01).
[5]張曉露.基于Solidworks的雙擺桿擺角放大機(jī)構(gòu)運動仿真分析[J].機(jī)械研究與應(yīng)用,2014,27(01).