基于MATLAB的重型商用車轉向輪擺振運動分析及優化
2021-09-26 19:40:19張博奇,吳鐵鋒
汽車科技 2021年4期
張博奇,吳鐵鋒

摘? 要:通過建立車輪運動過程中擺振運動數學模型,使用MATLAB軟件進行建模分析,分析車輪擺振運動的相關影響參數,以及各參數因素的影響程度,結合整車實際工況,優化各參數因素的設計方案,減緩或消除車輪擺振,解決實際工程難題。
關鍵詞:重型商用車;轉向輪擺振;擺振運動模型;
中圖分類號:U461.6+1? ?文獻標識碼:A? ?文章編號:1005-2550(2021)04-0087-05
The Research and Optimization of Steering Wheel Shimmy Motion of Heavy Commercial Vehicles
ZHANG Bo-qi, WU Tie-feng
( Zhejiang Geely New Energy? Commercial? Vehicle? Group? CO.,LTD.
Hangzhou 310000, China )
Abstract: By establishing the mathematical model for wheel shimmy motion in the process of motion and using MATLAB software for modeling analysis, analyzed the influence parameters of wheel shimmy motion and the influence degree of each parameter factors , combined with the actual vehicle working conditions, optimized the design scheme of each parameter factor to slow down or eliminate wheel shimmy and solve practical engineering problems.
隨著物流行業的競爭加劇,物流運輸的高效性受到行業的關注度不斷提升。為了追求運輸的高效性,客戶對運輸載具的高速安全性和穩定性提出更為嚴格的要求。重型商用車作為公路運輸的主要運輸載具,承擔著絕大部分的高速運輸市場的需求,為了滿足市場不斷提升的高速安全性和穩定性的需求,國內主要的商用車主機廠都在研究商用車的高速性能,尤其是整車的高速行駛穩定性。目前市場上反饋部分重型商用車在高速下存在車輪擺振現象。本文從力學運動方向,對車輪擺振的現象進行分析,并進行優化設計。
1? ? 車輪擺振現象的基本原理
轉向車輪擺振現象是一種受迫振動,轉向輪端在驅動力矩的作用下,產生周期性振動。驅動力矩主要由兩部分組成:
①車輪總成在高速下產生的擺振力矩:
車輪總成在實際生產過程中,由于生產誤差、裝配誤差等累積,車輪的質心偏離幾何旋轉中心。實際生產中用車輪總成的不平衡量來衡量車輪的質心偏離幾何旋轉中心的程度。車輪總成的偏心質量在高速旋轉運動中產生離心力,驅動輪胎振動;
②輪胎的徑向力波動產生的擺動力矩:
由于輪胎的材料特性、生產誤差等,輪胎在運動中的徑向力存在一定的波動,左、右轉向輪的徑向力波動導致兩側轉向輪的徑向力出現差值,產生一種擺振驅動力。
2? ? 系統模型
2.1 系統驅動力矩模型
由于輪胎的徑向力波動涉及輪胎特性,本文只著重分析由車輪總成的偏心質量在旋轉過程中產生的擺振驅動力矩。
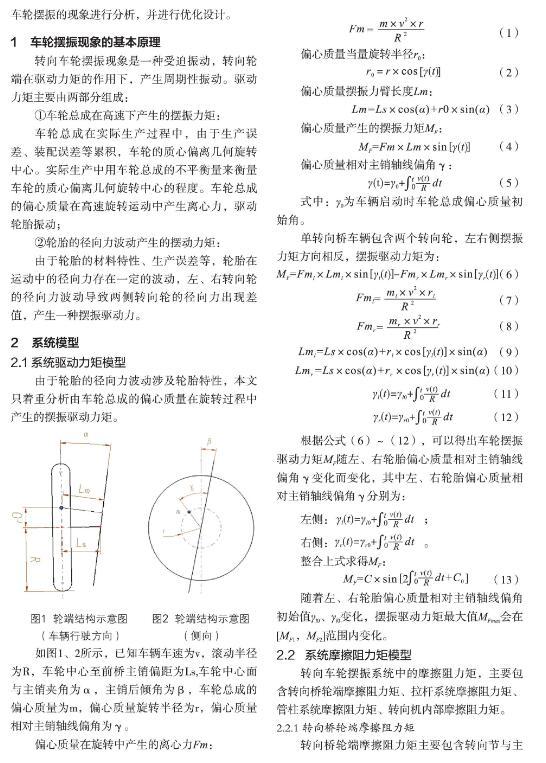
如圖1、2所示,已知車輛車速為v,滾動半徑為R,車輪中心至前橋主銷偏距為Ls,車輪中心面與主銷夾角為α,主銷后傾角為β,車輪總成的偏心質量為m,偏心質量旋轉半徑為r,偏心質量相對主銷軸線偏角為γ。
偏心質量在旋轉中產生的離心力Fm:
(1)
偏心質量當量旋轉半徑r0:
(2)
偏心質量擺振力臂長度Lm:
(3)
偏心質量產生的擺振力矩MF:
(4)
偏心質量相對主銷軸線偏角γ:
(5)
式中:γ0為車輛啟動時車輪總成偏心質量初始角。
單轉向橋車輛包含兩個轉向輪,左右側擺振力矩方向相反,擺振驅動力矩為:
(6)
(7)
(8)
(9)
(10)
(11)
(12)
根據公式(6)~(12),可以得出車輪擺振驅動力矩MF隨左、右輪胎偏心質量相對主銷軸線偏角γ變化而變化,其中左、右輪胎偏心質量相對主銷軸線偏角γ分別為:
左側:? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ;
右側:? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 。
整合上式求得MF:
(13)
隨著左、右輪胎偏心質量相對主銷軸線偏角初始值γl0、γl0變化,擺振驅動力矩最大值MFmax會在[MF1,MF2]范圍內變化。
2.2? ?系統摩擦阻力矩模型
轉向車輪擺振系統中的摩擦阻力矩,主要包含轉向橋輪端摩擦阻力矩、拉桿系統摩擦阻力矩、管柱系統摩擦阻力矩、轉向機內部摩擦阻力矩。
2.2.1 轉向橋輪端摩擦阻力矩
轉向橋輪端摩擦阻力矩主要包含轉向節與主銷摩擦力矩、輪端止推軸承產生的摩擦阻力矩。
如圖3所示,單側輪胎載荷為G,主銷內傾角為θ,主銷與轉向節襯套壓力FZ、轉向節與止推軸承壓力Fg分別為:
(14)
(15)
轉向節與主銷摩擦力矩為Mu1:
(16)
轉向節與止推軸承摩擦力矩為Mu2:
(17)
式中:u1為轉向節與主銷摩擦系數,u2為轉向節與止推軸承摩擦,r1為主銷半徑,r2為止推軸承當量旋轉半徑。
2.2.2 拉桿系統摩擦阻力矩
車輪擺振時拉桿系統摩擦阻力矩主要為球銷轉動摩擦力矩Mu3,根據實測結果,單個球銷轉動摩擦力矩為mu1,直拉桿包含2個球銷,橫拉桿總成含有2個球銷,直拉桿總成、橫拉桿總成相對輪端的傳動比分別為i0、i1。
車輪擺振時,需要克服的拉桿系統摩擦力矩:
(18)
2.2.3 管柱系統摩擦阻力矩
管柱系統內包含十字銷萬向節,單個十字銷萬向節轉動力矩0.25N.m,管柱系統一般包含兩個十字銷萬向節,管柱系統摩擦阻力矩為mu2,從輪端至管柱系統的傳動比為i2。
車輪擺振時管柱系統逆向運行,需要克服的管柱摩擦力矩:
(19)
2.2.4 轉向機內部摩擦阻力矩
重型商用車采用循環球式液壓轉向機,車輪擺振時轉向機發送逆向轉動,轉向機內部摩擦力矩為mu3,從輪端至轉向機的傳動比為i3。
車輪擺振時轉向機逆向運行,需要克服的轉向機內部摩擦力矩:
(20)
2.3? ?系統阻尼力矩模型
轉向車輪擺振運動系統中,包含有液壓轉向機、輪胎總成,部分車型前橋輪端還匹配阻尼軸承,以上三種零部件均含有阻尼力,在車輪擺振時產生阻尼力。液壓轉向機、輪胎總成中的阻尼力很小,本文中僅重點考慮輪端阻尼軸承阻尼力矩。
2.3.1輪端阻尼軸承阻尼力矩
車輪擺振時前橋轉向節相對前軸以相同的角速度運動,轉向節與前軸間匹配阻尼軸承,阻尼軸承因轉向節與前軸的相對運動產生阻尼力距Mc:
(21)
式中:c為阻尼軸承阻尼系數,φ為車輪擺振角速度,rc為阻尼軸承當量旋轉半徑。
2.4? ?輪胎扭轉阻力矩模型
轉向車輪擺振運動系統中,輪胎是彈性零件,車輪擺振時輪胎會出現扭轉,產生扭轉力矩,輪胎的扭轉剛度為K,
1)輪胎相對地面的彈性擺角為φ0,輪胎扭轉阻力矩Mk:
(22)
式中:sk為輪胎著地點至主銷軸線距離。
2.5? ?系統運動方程
根據輪端的受力情況以及輪端特性,確定車輪擺振的運動方程為:
當車輪擺振時輪胎沒有側滑時,輪胎相對地面的彈性擺角≤φ0,此時轉向輪端系統的擺振振動方程為:
1)當MF≥Mu時,車輪擺振。
(23)
2)當MF (24) 上式中: (25) (26) 式中:I0為輪端繞主銷轉向慣量,c為阻尼軸承阻尼系數,K為輪胎的扭轉剛度。 從整車行駛安全角度,若因車輪擺振導致輪胎側滑,會嚴重整車直線行駛穩定性,因此設計時應保證車輪擺振時輪胎沒有出現側滑。 求解系統運動方程,得出車輪擺振的穩態運動方程: (27) (28) (29) 3? ? 系統仿真驗證 根據建立的系統運動模型,使用Matlab/Simulink 功能,進行系統仿真分析,驗證車輪擺陣運動與數學模型的一致性。 車輪擺陣運動仿真結果顯示,車輪擺振運動狀態與公式(27)數學模型一致,構建的車輪擺陣運動數學模型符合車輪擺振運動實際工況。 4? ? 車輪擺振現象優化 由于零部件的成產、裝配誤差,轉向輪端上不可避免的存在質心偏離問題,車輛在高速運動時不可避免的出現一定大小的擺振驅動力矩。 根據公式(6)~(13),可以得出車輪擺振驅動力矩MF隨左、右輪胎偏心質量相對主銷軸線偏角γ變化而變化,隨著左、右輪胎偏心質量相對主銷軸線偏角初始值γl0、γl0變化,擺振驅動力矩最大值MFmax會在[MF1,MF2]范圍內變化。 根據擺振運動現象,車輪擺振運動分為三類: 1.車輪偶爾出現擺振,擺振消失,簡稱偶發擺振。 當擺振系統阻力距Mu滿足MF2 車輪的偶發擺振是車輛運動過程中不可避免的現象,存在時間短,振動影響小、危害小,可以不做應對措施。 2.車輪有時出現長時間擺振,有時長時間沒有擺振現象,簡稱間歇擺振。 當擺振系統阻力距Mu滿足MF1 間歇擺振的根源是擺振系統阻力距Mu處于驅動力距MF最大值MFmax的變化范圍[MF1,MF2]內。間歇擺振會影響整車高速行駛穩定性,造成駕駛員的精神緊張和疲勞,需要重點關 注。 間歇擺振情況下,驅動力距MF與擺振系統阻力距Mu差值較小,可以通過重新匹配轉向橋左、右車輪的平衡塊,減小車輪不平衡量進行解決。 3.車輪一直出現擺振現象,簡稱長期擺振。 當擺振系統阻力距Mu滿足Mu≤MF1時,即系統擺振驅動力矩明顯大于系統阻力矩,車輛達到一定車速后車輪就會一直出現擺振。 長期擺振會嚴重危害整車行駛安全,需要重點解決,主要從兩方面進行: 1)減小系統擺振驅動力矩Mu的振幅C。 根據公式(1)~(13),擺振驅動力矩MF的振幅C的大小與車速v、輪胎滾動半徑R、車輛中心偏Ls、左、右車輪總成的偏心質量m、左、右車輪偏心質量旋轉半徑r的大小相關,影響最大的因素是左、右車輪總成的偏心質量m、左、右車輪偏心質量旋轉半徑r、車輪中心至前橋主銷偏距Ls、車速v,其中車速v與車輛工況相關,無法約束。 因此減小系統擺振驅動力矩MF的主要措施如下: ①控制輪端均勻性,減小左、右輪端的偏心質量m; ②控制輪端均勻性,減小左、右車輪偏心質量旋轉半徑r; ③優化設計方案,合理減小車輪中心至前橋主銷偏距Ls; 2)優化轉向系統設計,減小車輛擺振運動幅度。 根據公式(27)~(29),可以得出車輛擺振運動幅度φc轉向系統參數輪端繞主銷轉向慣量I0、阻尼軸承阻尼系數c、輪胎的扭轉剛度K相關,因此轉向系統設計優化的主要措施如下: ①合理設計車輪中心至前橋主銷偏距Ls,避免輪端繞主銷轉向慣量I0過大; ②適量增大阻尼軸承阻尼系c,減小車輛擺振運動幅度φc; ③車輛保證輪胎胎壓,避免輪胎的扭轉剛度K減小; 5? ? 結束語 重型商用車轉向輪擺振運動數學模型的建立,為轉向及前橋系統的設計提供了理論參考,對轉向系統相關參數的設計優化有一定指導意義。通過采用MATLAB建模分析可以直觀觀察各個因素對車輪擺振運動的影響,提升設計能力。但車輪擺振運動涉及大量相關零部件,與相關零部件的性能參數相關,本文的轉向輪擺振運動數學模型未能全部體現各個性能參數,理論設計方案需要與臺架試驗、整車道路試驗驗證結合,尋找符合整車實際工況需求的優化設計方案。 參考文獻: [1]王霄鋒.汽車底盤設計.北京:清華大學出版社,2010.4. [2]王望予.汽車設計.4版.北京:機械工業出版社,2004. [3]陳家瑞.汽車構造:下冊.3版.北京:機械工業出版社,2009.2. [4]余志生.汽車理論[M].北京: 機械工業出版社,1996. [5]韓利竹,王華. MATLAB 電子仿真與應用[M]. 北京: 國防工業出版社,2003. [6]郭孔輝.汽車操縱動力學[M].長春:吉林科學技術出版社,1991. [7]靳曉雄,張立軍,江浩.汽車振動分析.上海:同濟大學出版社,2002. 張博奇 畢業于湖南大學,車輛工程專業,本科學歷,現就職浙江吉利新能源商用車集團有限公司商用車研究院,重卡中心底盤開發部,任轉向系統主管工程師。主要研究重卡轉向系統設計方法,從事商用車轉向系統設計8年,完成多款車型平臺設計開發。