基于麥克納姆輪的萬向式可臥升降輪椅設計研究
2021-09-28 11:27:18尹杰朱雪明嚴正陽李志明畢清林輝
中國設備工程 2021年18期
關鍵詞:老年人
尹杰,朱雪明,嚴正陽,李志明,畢清,林輝
(1.江漢大學智能制造學院;2.江漢大學工程訓練中心;3.江漢大學人工智能學院,湖北 武漢 430000)
20世紀90年代以來,中國的老齡化進程加快。隨著年齡的增加,老年人整體健康水平下降,健康問題逐漸突出。由于年齡的原因,老人的體溫代謝以及體溫中樞都已經衰老,代謝緩慢,出現身體抵抗力降低等情況,所以導致老年人很容易腿腳不便,需要經常坐在輪椅上。因此我們設計了一款新型輪椅,該輪椅摒棄了普通輪椅輪子,采用麥克納姆輪可以實現全向移動,即使在狹小的房間內,使用者也可以很好地移動位置;輪椅升降可以控制,可以調整到合適高度方便使用者從輪椅上下來,還能升高輪椅方便老人拿夠不著的物品;輪椅的背板轉動和腳托可以實現聯動,控制背板轉動的同時能夠向外推進腳托,使用者可以躺在輪椅上休息。這款產品具有市面上產品所不具備的功能,更有利于解決老年人在坐輪椅時的種種不便利,相信會比市場上同等產品更有優勢。
1 輪椅的結構設計
1.1 輪椅的整體性要求
為了方便老年人隨時隨地可以躺下來休息,因此輪椅需要有坐臥兩種狀態,考慮到老年人行動不太方便,因此需要在坐臥轉換機構上加上電驅動功能,實現一鍵坐臥轉換;家里活動空間相對于輪椅較為狹小,因此輪椅需靈活自如,方便使用;為使老年人能夠不用起身就可以拿到一定高度的東西,輪椅必須具有升降功能。基于上述功能需求,本文將采用麥克納姆輪與輪椅結合,作為該輪椅的主要行走機構,其能夠在任意的水平方向上實現平移和旋轉;采用絲杠螺母副和六連桿結構實現輪椅的坐臥兩種狀態的轉換,該結構可以實現在90~180°任意角度的轉換,并且有良好的自鎖性;采用絲杠螺母副和剪差式機構實現輪椅的升降功能。同時使用基于STC89C52單片機作為輪椅的控制系統的核心,再搭配點動式按鍵開關、電機驅動模塊和微型直流減速電機共同構成一個完整的開環控制系統,實現輪椅的各項運動。
總體結構如圖1所示。

圖1 輪椅結構總圖
1.2 行走機構設計
為了實現輪椅能靈活自由地移動,現有兩種方案:方案一:使用萬向輪;方案二:使用麥克納姆輪(全向輪)。
兩種方案進行對比:(1)萬向輪結構簡單,制作成本低,具有省時省力、耐磨耐劃、耐水蒸氣、耐沖擊、耐老化、抗腐蝕等一系列優點,安裝在助老輪椅上能使輪椅在房間里360°自由旋轉移動,但是,萬向輪承載能力一般,適用于平坦光滑的路面,廣泛應用于機械設備、電子設備、大型超市、醫療設備等。而且萬向輪不能與電機驅動配合。(2)麥克納姆輪(全向輪)結構復雜,所有的轉動部位都使用軸承,所以制作成本較大。行走機構設計采用麥克納姆輪與輪椅結合,該輪可采用全向驅動技術,加之麥克納姆輪的獨特運行方式,能使輪椅在任意方向上實現平移和原地旋轉。可以實現前行、橫移、斜行、旋轉及其組合等運動方式。借助這一強大的機動性,輪椅可以在狹小的空間內自由任意地移動。而且麥克納姆輪承載能力較好。
對比兩種方案,因為更需要的是自動可控制機構,所以選擇麥克納姆輪作為輪椅的行走機構。
移動原理分析:麥克納姆輪由一般輪子在外圓的輪廓上,按45°角斜放著許多可以轉動的鼓形輥子,當輥子與地面接觸的時候,地面會給車輪45°夾角的摩擦力,也就是沿輥子軸線方向的摩擦力。左前方和右后方的輪子為左旋輪,左后方和右前方的輪子為右旋輪。四個輪子有四個電機單獨控制,控制四個輪子的轉向和轉速即可控制輪椅的平動或者旋轉。
當四個輪子均向前或者向后轉動時,其左右分力會相互抵消,輪椅就會向前移動;同理斜對角兩輪同向轉動,另外,兩輪反向轉動時,前后分力會抵消,輪椅就會向前運動。原地旋轉時四輪形成兩對同向力矩時,輪椅零半徑原地旋轉。合理調整各輪轉速和轉向,即可實現任意方向上的移動。
1.3 升降機構設計
升降姿態轉換通過絲杠螺母副和剪差式機構實現。電機通過聯軸器和絲杠連接在一起,電機轉動帶著絲杠一起轉動,絲桿法蘭、剪叉式支架和滑塊一起鏈接在同一根桿上,絲杠轉動,絲桿法蘭通過連桿帶動束型導軌上的滑塊運動,同時連桿也推動剪叉式支架運動,坐板與剪叉式支架同樣用直線導軌鏈接,以此實現輪椅的升降功能。
剪叉式機構在座板上升過程中,上平面始終和下平面保持平行,而且高度穩定,能夠緩慢平穩地上升、下降,并且承載一定的重量,老年人可以用手扶住扶手,更加安全。該機構有良好的自鎖性,可以在任意高度固定。
絲杠傳動精度比較高,從而可以保持上升或下降時的平穩。絲桿傳動還有很強的停留功能,只要信號一停止,絲桿可以很穩定地停留在某一位置。直線導軌采用束型導軌,束型導軌每個面都可以承受側向力,可以承受比較復雜的力,從而可以保證老人在輪椅上面的穩定。直線導軌和滑塊之間帶有滾珠,可以很大程度上減少摩擦。
1.4 坐臥機構設計
輪椅坐臥機構采用連桿機構,傳動機構為絲桿螺母副和直線導軌。通過減速電機帶動絲桿螺母副運動,從而帶動與絲桿螺母副鏈接的底桿做直線運動。底桿的另一端使用直線導軌約束,保證底桿在水平方向平動。
此時,底桿充當多連桿機構的動力桿,帶動多連桿運動,實現背板和腳板的聯動運動。坐臥機構圖如圖2所示。
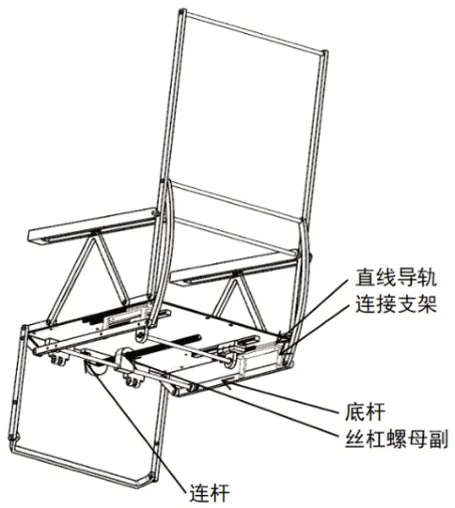
圖2 坐臥機構圖
使用多連桿機構,保證背板和腳板能同時轉動,使躺下時既平穩又安全。
動力裝置采用絲杠螺母副結構傳動,既能保證較大的傳動力矩,又能保證傳動的平穩性。
坐臥機構同時與扶手聯動,加強了結構的穩定性。
2 結語
現在社會對老年人的生活質量越來越關注,隨著科技水平的不斷提高,針對老年人生活起居的產品設計將不斷推動我國助老產業的發展。本文設計的一種基于麥克納姆輪的萬向式可臥升降輪椅,極大地方便了老年人的日常生活。該輪椅可以實現全向移動,實現坐臥姿態轉換,能夠升降,對改善老年人生活質量有極大的意義。
猜你喜歡
保健醫苑(2022年1期)2022-08-30 08:40:44
公民與法治(2022年4期)2022-08-03 08:20:26
保健醫苑(2022年6期)2022-07-08 01:25:16
保健醫苑(2022年4期)2022-05-05 06:11:20
中老年保健(2021年4期)2021-08-22 07:10:20
保健醫苑(2021年7期)2021-08-13 08:47:44
公民與法治(2020年18期)2020-10-28 08:48:10
保健醫苑(2020年1期)2020-07-27 01:58:14
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:28
海峽姐妹(2018年1期)2018-04-12 06:44:24