AES加密在無人機數據鏈上的設計與應用
2021-09-29 14:45:28天津航天中為數據系統科技有限公司張志科張曉君
電子世界 2021年14期
天津航天中為數據系統科技有限公司 張志科 楊 晨 張曉君
為了解決無人機數據鏈傳輸過程中的數據安全問題,采用AES算法對數據進行加解密。加解密采用單獨板卡設計,介紹了AES加密四種變換和密鑰擴展算法在FPGA上的實現方法,并根據無人機數據鏈數據幀格式的特點,設計了一種適合無人機數據鏈數據幀特點的AES加解密方案,最后在上位機上編寫自收發測試軟件,搭建系統回環測試環境,在明態和密態下進行對比。系統測試結果表明,加解密過程運行穩定,由加解密帶來的系統延時只占數據鏈本身延時的3%。
無人機數據鏈是實現無人機與地面站之間雙向傳輸信息的無線通信系統, 主要完成機載視頻的實時下傳、載荷控制及狀態回報和遙控遙測信息的分發。目前無人機與地面站的數據通信大多以明文形式傳輸,一旦數據鏈通信體制被人了解,就可以很輕松的共享無人機飛行數據,甚至劫持無人機,使我們不得不關注無人機數據鏈數據安全問題。在數據編碼調制之前對數據進行加密,可有效防止數據鏈數據被截獲和篡改,即使被截獲,截獲者也無法在可見的時間內將其破譯。
針對數據鏈的加密研究很早已經開始,張興凱等人總結了無人機信息傳輸系統的體系結構和特點,采用一種混合加密體制實現了對無人機上行數據鏈加密;張興凱等人在無人機遙控指令加密方式的研究中設計了一種基于序列密碼的一次一密加密方案;王劍等人設計了一種基于國密SM4算法的ACARS數據鏈信息的加密方案,實現了對報文的加密;胡子杰等人提出一種針對民用無人機的遙控數據保護方法,并從安全性和實現性方面對AES、PRESENT和RC4這3種加密算法的可行性進行了分析,得出AES算法易實現、安全性高。上述研究都是對上行遙控低速數據的加密方案,而對下行視頻和載荷等高速復合數據的加密有些力不從心,并且沒有對加解密系統引入的延時進行分析,本文提出一種基于AES算法的無人機數據鏈加密方案,該方案可實現對上行遙控和下行復合數據加密,并且加密速率快、安全性高,系統延時只增加3%。
1 系統總體方案
無人機數據鏈的數據以幀的形式傳輸,數據幀的幀頭、幀長在一般是確定不變的,所以分組密碼十分適合無人機數據加密;在分組密碼中Rijndael算法以其安全性、速度性能、實現的方便實用性、通用性和靈活性被選為AES標準(高級加密標準),并被廣泛應用。
無人機數據鏈分為地面終端和機載終端,地面終端完成上行遙控幀的加密和下行復合幀的解密,機載終端完成上行遙控幀的解密和下行復合幀的加密。加解密框圖如圖1所示。

圖1 加解密框圖
加解密采用單獨的板卡設計,增強通用性;AES算法在加解密板的FPGA上采用verilog語言實現,加密向量、密鑰和S盒存放在加解密板的flash中,可定期修改,保證安全性;加解密板和收發終端之間采用LVDS接口進行數據交互,目前無人機數據鏈數據速率一般在64M以下,LVDS接口足以滿足無人機數據鏈速率的要求。加解密板原理框圖如圖2所示。

圖2 加解密板框圖
2 AES加密算法的FPGA實現
AES是一種基于替換和置換的迭代對稱密鑰分組加密算法。置換是數據的重新排列,而替換是用一個單元數據替換另一個。AES使用了幾種不同的技術來實現置換和替換,包括:字節替換(SubBytes),行移位(ShiftRows),列混合(MixColumn),密鑰加(AddRoundKey),這種替換、置換和迭代算法十分適合FPGA實現。AES的數據和密鑰分組長度可分為128bits、129bits和256bits,本設計中選擇128bits。AES128算法中數據和密鑰都可以看作是一個以字節為單位的4X4的矩陣,經過10輪變換后得到密文數據。
2.1 四種變換
(1)字節替換(SubBytes)
字節替換是一種非線性的變換,也稱為S盒變換,將數據以查表方式替換為S盒中的數據。S盒的設計是AES安全性中很重要的一環,它的強度決定了AES加密算法的強度。許多學者對AES算法的改進主要體現在S盒算法的研究上,本設計中不討論S盒的生成,但為了適應后續S盒技術的升級,將S盒存放在flash中,可根據S盒技術的最新研究成果修改AES算法所使用的S盒,而不必修改程序。每次上電后,將S盒數據從flash中讀出,在加密過程中進行字節替換,S盒變換過程如圖3所示。
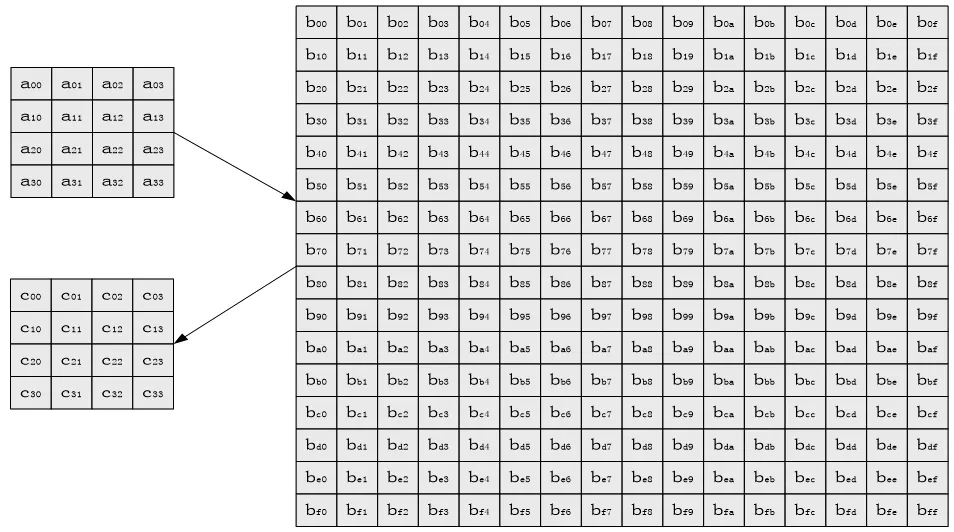
圖3 字節替換
(2)行移位(ShiftRows)
在行循環移位變換中,AES128算法第一行不變,第二行循環移位1個字節,第三行循環移位2個字節,第四行循環移位3個字節,生成新的矩陣。
(3)行移位(ShiftRows)
列混合運算在數學上可以看作是數據矩陣a(x)的每一列與多項式矩陣c(x)的乘法,結果對x4+1取模,即:b(x)=c(x) * a(x)(mod x4+1);

矩陣展開:

由上式可以看出,與02相乘相當于左移1位,矩陣乘法可以拆分為加法、異或和移位運算。
(4)密鑰加(AddRoundKey)
輪密鑰加是將種子密鑰擴展出的密鑰與數據矩陣按位異或,無特殊變換。
可以看出AES四種變換的實質就是簡單的查表、移位、相加和異或運算,易于FPGA實現。
2.2 密鑰擴展
在AES128中,種子密鑰為一個4X4矩陣,記作ω[0:3],ω[0]為第一列,密鑰擴展就是將矩陣ω擴展40個新列,構成4X44的擴展密鑰矩陣,擴展矩陣按照以下方式遞歸產生:

其中T變換,由三種變換組成:字節循環移位、字節替換和輪常量異或:
(1)字節循環移位:將ω[i-1]中的4個字節循環移位1個字節,即將[b0,b1,b2,b3]變換為[b1,b2,b3,b0]。
(2)字節替換:字節循環移位后的結果使用S盒進行字節替換。
(3)輪常量異或:將前兩步的結果同輪常量Rcon[j]進行異或,j表示輪數。

表1 輪常量Rcon[j]
可見,密鑰擴展算法也是一些簡單的移位、替換和異或,易于FPGA實現。
3 AES在無人機數據鏈的應用
為解決無人機數據鏈數據安全問題,發送端在數據發送之前對數據采用AES算法加密,接收端接收到數據后再對數據進行解密,實現數據加密傳輸。無人機數據鏈數據以幀的形式進行數據傳輸,接收端需要通過幀頭和幀長進行數據同步,所以無人機數據鏈的AES加密要做到以下幾點:
(1)數據幀的幀頭不加密,且可以適應不同幀頭;(2)數據傳輸中不能傳輸密鑰,保證安全性;(3)每個數據幀使用不同的密鑰加密;(4)可對幀長不是128bits幀數倍的數據幀加密,且不增加數據量;(5)低延時。
3.1 無人機數據鏈幀格式
為滿足無人機數據鏈數據加密需求,需對無人機數據鏈幀格式作詳細定義。無人機數據鏈數據幀包括:幀頭、密鑰同步字和待加解密數據三部分。幀頭的內容和長度一般固定;密鑰同步字長度固定,在固定位置存放加密向量編號、密鑰編號和待加解密數據的長度。幀長存放在密鑰同步字中兼容不同幀長的數據格式,加密向量和密鑰存放在加解密板的flash中,在數據鏈中只傳輸編號,保證安全性。在本設計中,flash中存放著256組加密向量和密鑰,每幀隨機取一組加密向量和密鑰對數據進行加密,保證每幀使用不同的密鑰加密。
3.2 收發終端和加解密板之間的數據交互
無人機收發終端和加解密板之間的也是以幀的形式進行數據交互,由圖1所示,收發終端和加解密板之間每個通道有6對LVDS線,收發各3對,發送和接收的3對LVDS線分別傳輸:時鐘、幀頭指示和數據,數據傳輸幀格式如圖4所示。

圖4 數據傳輸格式
時鐘以固定的速率不間斷發送;幀頭指示拉高標識此時的數據為幀頭,表示加解密板不需要加密的數據,以便接收端做數據同步和數據提取;密鑰同步字是加解密板要解析的內容,加解密板從中提取加密向量的編號、密鑰的編號和待加解密數據長度,對數據數據進行加密。最后將幀頭、密鑰同步字和加解密數據發送給收發終端,完成加解密。
3.3 數據加解密過程
采用AES算法的輸出反饋模式(OFB)對數據進行加解密,可有效解決待加解密數據不是128幀數倍的問題,該模式下加密和解密過程相同。
加解密板提取待加密向量編號、密鑰編號和待加解密數據長度后,開始對數據進行加解密,加密過程如圖5所示。

圖5 AES加密過程
由圖5所示,加解密板收到加密向量編號和密鑰編號后,開始生成向量密文;AES實際是對加密向量進行加密,加密生成向量密文,待加密分組數據和向量密文進行異或后輸出密文數據;本設計中每組加密向量生成一組向量密文后,加密向量向左循環移位1bit,保證每幀中不同分組數據異或的向量密文不同;對于最后不是128bits幀數倍的分組數據根據待加密數據長度,將后面超出部分舍棄,保證加密不增加數據量,實現幀長自適應。
解密的過程和加密過程是相同,接收端根據加密向量編號和密文編號生成與發送端相同的向量密文,再和密文數據異或,即可得到明文數據。
4 系統測試
系統測試基于一套上行速率為51.2Kbps的無人機數據鏈,上位機模擬無人機遙控數據,遙控數據幀長為128B,每幀數據中包含幀計數和CRC校驗,在上位機上編寫自收發測試軟件,測試軟件通過UART接口將遙控數據發送給地面終端,并記錄遙控數據幀發送時間,地面終端通過無線將數據發送給機載終端,然后機載終端接收到遙控數據后再通過UART接口發送給上位機的測試軟件,上位機接收到完整遙控數據幀后通過幀計數和CRC校驗判斷遙控幀的連續性和正確性,并通過幀計數記錄接收到遙控幀的時間,與發送時間對比得出系統延時,完成回環測試環境,測試軟件統計發送幀數、接收幀數、誤碼率和延時,測試系統框圖如圖6所示。

圖6 系統測試框圖
在明態和密態下分別測試15萬幀數據,在明態下測試軟件統計15萬幀遙控數據的誤碼率和平均延時,密態下測試軟件同樣統計15萬幀遙控數據的誤碼率和平均延時,通過明態平均延時和密態平均延時對比得出由于加解密帶來的系統延時,測試結果如圖7、8所示,明態和密態結果對比見表2所示。
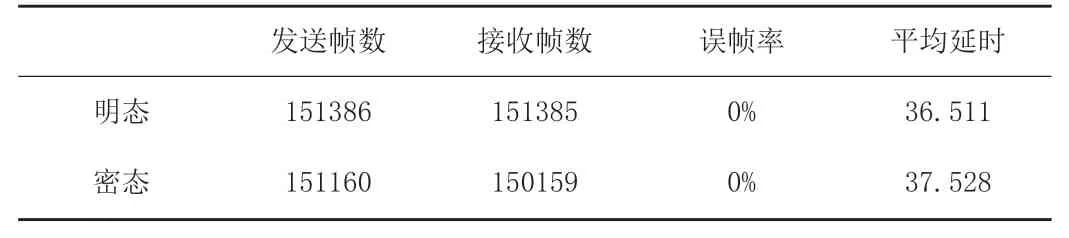
表2 測試結果分析
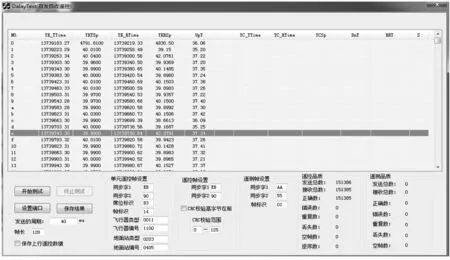
圖7 明態測試結果
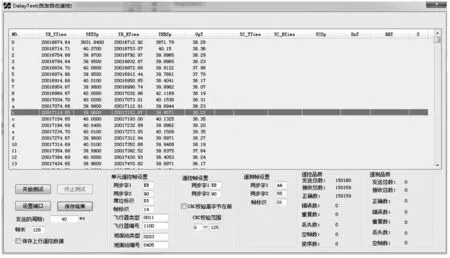
圖8 密態測試結果
由測試結果,15萬數據誤幀率為0%,平均延時密態比明態增加1.017ms,測試結果表明,加解密運行穩定,由加解密過程帶來的延時占系統延時不到3%。
結論:本設計首先討論了AES四種變換和密鑰擴展算法的結構特點,經分析AES算法結構簡單,非常適合在FPGA上實現;然后詳細討論了無人機數據鏈數據特點,根據無人機數據鏈的數據特點,提出無人機數據加密的要求;最后根據無人機數據鏈數據加密要求,設計了一種基于AES的無人機數據鏈數據加密方案。本設計中解決了無人機數據鏈數據幀長不是128bits整數倍,加密不增加數據量和低延時等問題;加密向量和密鑰存放在flash中,數據幀中只傳輸編號,保證安全性,并實現一次一密;S盒存放在flash中,可以隨著S盒技術的進步升級S盒,而不必修改FPGA程序,增強通用性。本設計經過長時間拷機測試,加解密運行穩定,延時滿足無人機數據鏈數據要求。
