列控車載設備測速測距仿真測試方法與應用
2021-10-04 00:49:32鮑鵬宇寧云轉
鐵路通信信號工程技術 2021年9期
鮑鵬宇,寧云轉
(1.北京全路通信信號研究設計院集團有限公司,北京 100070;2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
列控車載設備測速測距是車載設備的關鍵單元,負責測量列車運行速度和距離,其性能直接影響著列控系統車載設備的安全性、可靠性和可用性[1-2]。為實時獲取列車速度、距離信息,主要使用3 種傳感器:轉速計傳感器(速傳)、多普勒雷達傳感器(雷達)以及慣性加速度傳感器(加傳)。然而,單純的算法仿真并不能完全模擬傳感器數據,半實物平臺測試又無法覆蓋特殊工況[3-7]。為解決此問題,本文設計了一種列車測速測距系統仿真方法,既可滿足傳感器數據的真實性,又可覆蓋特殊工況,保證算法和軟件安全可靠運行。
1 測速測距仿真系統結構
測速測距仿真系統主要包含5 個部分,列車運行控制單元、傳感器模擬單元、數據注入單元、測速測距待測試單元和測速測距仿真控顯界面,如圖1 所示。
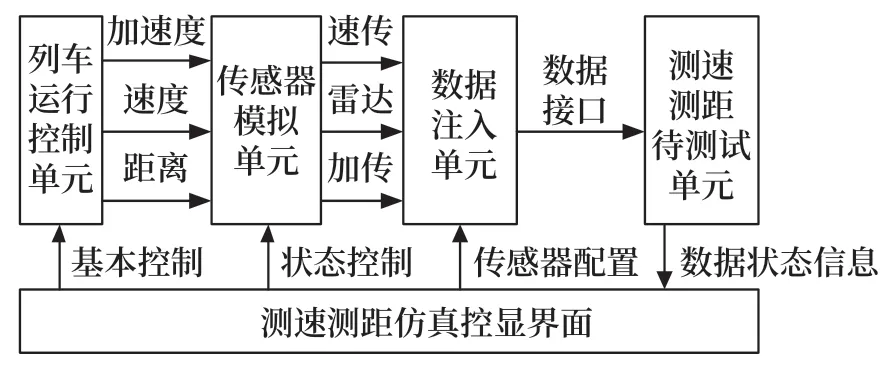
圖1 測速測距仿真系統結構Fig.1 Structure of simulation system for speed and distance measurement
2 仿真系統子功能單元
下面分別對各單元的功能進行詳細描述。
2.1 測速測距仿真控顯界面
測速測距仿真環境的主操作界面上可以完成所有測試環節。通過在界面上進行操作,實現列車加減速、傳感器配置、傳感器狀態等信息的控制,并將待測試的測速測距軟件運行結果顯示在界面上。
如圖2 所示,控顯界面包含4 個區域:列車控制區域、列車運行狀態顯示區域、傳感器控制區域和運行結果顯示區域。各區域功能如下。
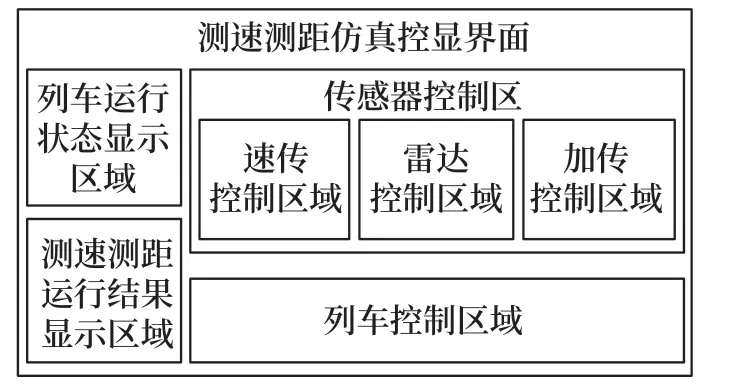
圖2 測速測距仿真控顯界面結構Fig.2 Interface of control and display of speed and distance measurement simulation
列車控制區域:模擬列車的牽引制動手柄,并通過牽引制動手柄輸入列車的牽引制動信息,實現列車加速和減速的仿真。
列車運行狀態顯示區域:顯示模擬的列車真實運行速度、距離、加速度等信息,便于與計算結果進行對比。
傳感器控制區域:選擇使用的傳感器,以及傳感器的工作狀態等信息。例如,設置速傳的空轉打滑、方向、斷線等狀態;設置雷達的反射信號、擾動等狀態。通過此區域的設計,可模擬傳感器的不同工況,實現傳感器組合故障狀態測試。
測速測距運行結果顯示區域:顯示測速測距軟件計算列車運行的速度、距離、加速度、空轉打滑狀態、方向和測速測距系統工作狀態等信息。
2.2 列車運行控制單元
列車運行控制單元是仿真系統的驅動,通過接收控顯界面的列車控制區域輸入的加減速狀態,實現列車運行速度和距離的仿真,仿真方法如下。
牽引力對應的加速度為a,列車當前的速度為v0,已運行的距離為d0,仿真周期為T,則本周期的速度v和距離d的計算方法如公式(1)所示。

2.3 傳感器模擬單元
傳感器模擬單元根據仿真界面輸出的狀態控制信息,并結合各傳感器的特點,模擬速傳、雷達和加傳的數據,如圖3 所示,主要包含兩個部分:傳感器基本數據模擬和傳感器狀態模擬。
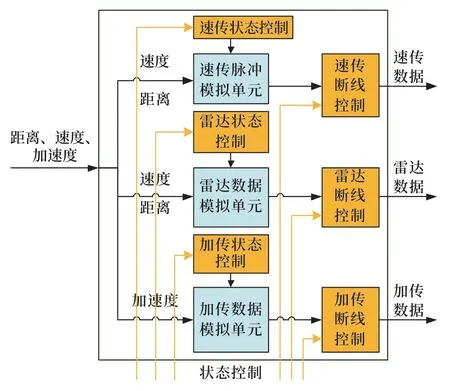
圖3 傳感器模擬單元結構Fig.3 Structure of sensor simulation unit
傳感器基本數據模擬單元可模擬速傳、雷達、加傳的數據,具體方法如下。
1)速傳脈沖模擬單元根據速度、距離信息,產生一定頻率的脈沖數據,并將脈沖數據以測速測距主程序可識別的協議進行輸出;
2)雷達數據模擬單元根據速度距離信息,產生雷達數據,并將雷達數據以測速測距主程序可識別的協議進行輸出;
3)加傳數據模擬單元根據加速度信息,產生加傳數據,并將加傳數據以測速測距主程序可識別的協議進行輸出。
傳感器狀態控制包含各傳感器的狀態控制和斷線控制。其中速傳的狀態主要為空轉打滑可通過改變速傳脈沖頻率的形式實現,雷達和加傳的狀態可通過改變雷達(加傳)數據模擬單元生成的通信數據狀態信息的形式實現,從而達到傳感器狀態控制的目的。各傳感器的斷線控制可通過停止輸出傳感器數據進行實現。
2.4 數據注入單元
數據注入單元接收來自仿真界面輸出的傳感器配置信息,選擇特定的傳感器配置組合,如“2 速傳+2 雷達”、“2 速傳+2 加傳”、“3 速傳”等,并為測速測距待測試軟件單元提供相應的數據接口。
2.5 測速測距待測試單元
測速測距待測試單元周期調用待測試的測速測距軟件,使用數據注入單元提供的軟件接口獲取傳感器數據,并將測速測距的運行結果發送到仿真界面。
3 空轉打滑控制方法
速傳的空轉打滑現象是影響速傳測速測距精度的關鍵因素,因此對測速測距系統空轉打滑現象的測試尤為重要[8-9]。目前,主要通過在鋼軌上噴涂減摩液,在通過減摩液的區域時進行制動和啟動的方法實現空轉打滑的測試。這種測試方式既消耗大量的人力物力,又無法確保一定出現打滑現象。因此,通過軟件模擬打滑的方式顯得尤為重要。
如圖4 所示,空轉打滑通過單獨設置某個速傳的加速度,實現加入ABS 功能的速傳空轉打滑仿真,具體方法如下。
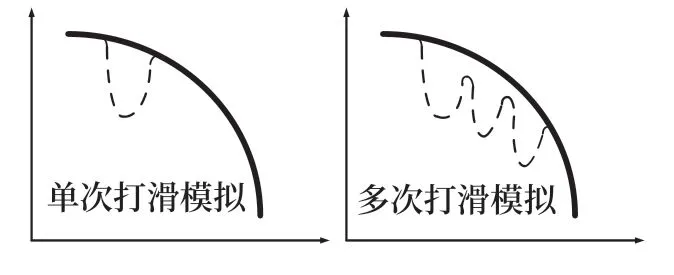
圖4 空轉打滑仿真方法Fig.4 Method to simulate idle running and sliding
1)單次打滑控制
a.改變被設置速傳的加速度至a1;
b.經過時間t1后,將加速度變為0;
c.改變被設置速傳的加速度至a2;
d.若打滑速傳速度與實際列車速度相同,則恢復為黏著狀態。
2)多次打滑控制
a.執行1)單次打滑的a.~c.步驟;
b.經過時間t2后,將加速度變為0,同時確保打滑速傳速度低于實際列車速度;
c.重復執行2)多次打滑的a.、b.步驟;
d.直至恢復打滑,執行1)單次打滑的d.步驟;
3)空轉模擬與打滑類似,可類比打滑的實現方式,將減速過程改為加速過程即可。
4 測速測距仿真界面
應用上述方法,設計測速測距仿真測試平臺軟件如圖5 所示。
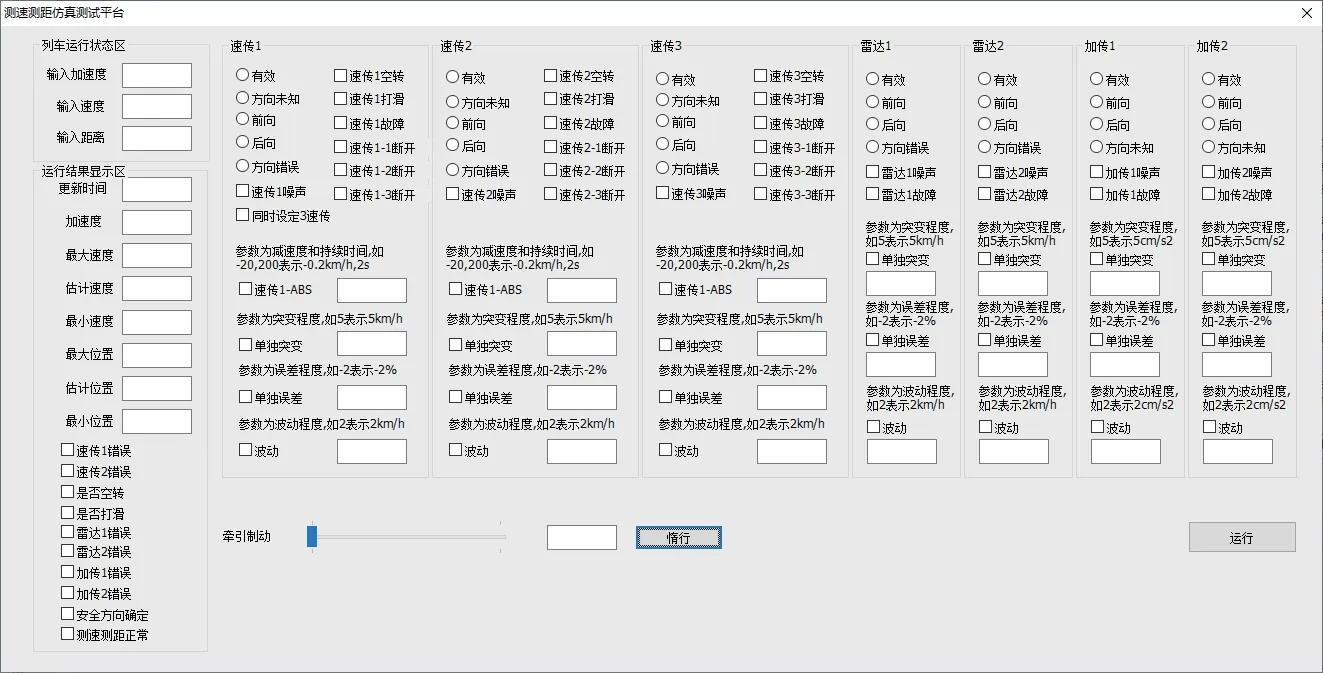
圖5 測速測距仿真測試平臺軟件Fig.5 Software of simulation test platform for speed and distance measurement
該測速測距仿真平臺可實現以下功能。
1)空轉打滑模擬仿真,包括單速傳空轉打滑、多速傳空轉打滑,以及空轉打滑類型(單周期,多周期)設置,空轉打滑時延設置;
2)傳感器斷線仿真,包括單傳感器斷線、多傳感器斷線;
3)傳感器狀態控制,包括雷達、加傳狀態的設置;
4)傳感器數目控制,包括速傳、雷達、加傳的數目控制,速傳的通道控制;
5)測速測距數據的顯示和記錄;
6)可進行上述功能的任意組合測試:如“單速傳空轉+雷達斷線”,“單速傳斷線+加傳失效”等。
5 結論
本文設計的測速測距仿真方法和測試平臺,可通過軟件設置的方法覆蓋各類特殊工況和組合故障模式,實現測速測距軟件的全面測試,保證算法和軟件安全可靠運行。
