缺陷汽車玻璃檢測方法
2021-10-05 12:53:48梁椅輝
智能計算機與應用
2021年5期
陳 晨,董 帥,梁椅輝,鄒 昆
(電子科技大學 中山學院,廣東 中山528400)
0 引 言
隨著汽車行業的高速發展,汽車玻璃需求大增,每年以20%的增長率不斷增加,中國汽車玻璃在全球市場份額占比高達25%以上。汽車玻璃生產過程中由于尺寸大、設備切割不精細,容易引起不規則斷裂、劃痕、輪廓不方正等缺陷如圖1所示,給企業生產效率造成較大影響。目前很多企業依靠人眼識別,不僅無法保障識別準確率,同時也浪費巨大人力。
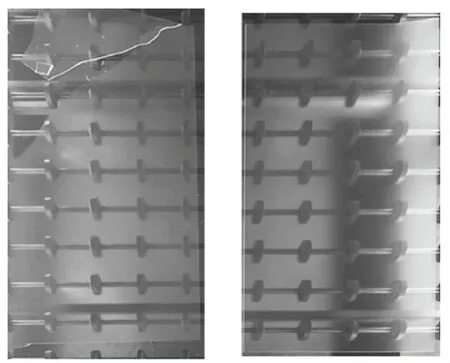
圖1 玻璃斷裂、輪廓不方正等缺陷Fig.1 Defects such as glass breakage and irregular contour
隨著計算機技術的飛速發展,很多學者提出采用計算機視覺方法進行檢測,張彩霞結合邊緣檢測、Otsu閾值分割、K均值聚類算法對缺陷標記[1];Rosli提出傳統圖像處理方法檢測[2];Zhou,Xianen提出利用小波變換和頻域方法進行檢測[3];Yao則使用特殊的光配合視覺算法進行檢測[4]。近些年隨著深度學習的興起,許多學者使用深度學習來提高識別準確度,例如Xiong,Honglin提出多尺度卷積神經網絡進行玻璃表面檢測[5];亓手動設計特征提取和識別,再使用簡單的BP網絡進行缺陷分類[6];Tao,Zhang提出提取玻璃的敲擊聲,并通過復雜變換提取特征,最終使用神經網絡進行缺陷分類[7],該方法主要針對玻璃內部結構缺陷,非表面缺陷。總體而言深度神經網絡相關方法優于傳統方法,但其準確率是需要足夠多的缺陷樣本支撐,本文也提出相應方法解決該問題,同時在神經網絡分類功能部分使用多分類,有效提高檢測準確率。
1 缺陷樣本自動生成
眾所周知,深度學習的強大來源于大量高質量的數據作為驅動,因此采集大量高質量玻璃正負樣本可以有效提高模型對缺陷的識別率。……
登錄APP查看全文
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
