基于MLP模型和模糊控制的盆栽灌溉系統
2021-10-08 00:46:07鄧力元劉桂波戶秋月顧潔瓊劉衍斌
計算機時代 2021年9期
鄧力元 劉桂波 戶秋月 顧潔瓊 劉衍斌
摘? 要: 不同的植物、土壤和花盆下的盆栽環境具有不一樣的特性,故難以使用一套恒定不變的控制算法來實現不同盆栽環境下的精準灌溉需求。文章結合當今農業灌溉系統的實現方法和經驗,設計并實現一種基于MLP模型和模糊控制的自動灌溉算法,針對實地盆栽環境,可調節控制系統參數以適應在不同盆栽環境下的精準灌溉需求。實驗表明,該控制系統能夠自適應盆栽環境的特性,灌溉后的實際土壤濕度值與預期值偏差小。
關鍵詞: MLP模型; 模糊控制; 精準灌溉; 自適應; 盆栽系統
中圖分類號:TP273+.2;S24? ? ? ? ? 文獻標識碼:A ? ?文章編號:1006-8228(2021)09-34-05
Abstract: Different plants, soils and potted environments have different characteristics, so it is difficult to use a set of constant control algorithm to realize the requirement for precise irrigation in different potted environments. Combined with the implementation method and experience of present agricultural irrigation system, this paper designs and realizes an automatic irrigation algorithm based on MLP model and fuzzy control. According to the field potted environment, the parameters of the control system can be adjusted to meet the precise irrigation requirements in different potted environments. The experiment shows that the control system can adapt to the characteristics of potted environment, and the deviation between the actual soil moisture value after irrigation and the expected value is small.
Key words: MLP model; fuzzy control; precise irrigation; adaptive; potted system
0 引言
智能盆栽作為智能家居的新寵,從技術范疇上屬于精準農業的一個技術分支,是現代化農業管理策略和農業操作技術的一種[1],精準灌溉逐漸成為規模化盆栽種植中的灌溉要求。而在當今市場所售的盆栽自動灌溉器中,大多仍采用閾值檢測或定時灌溉的方式,一些學者也對盆栽灌溉方案進行研究,包括預測用水量和智能灌溉控制等[2-4],但不同的盆栽環境具有不一樣的特性,恒定的灌溉方案并不能滿足不同盆栽環境下的精準灌溉需求。因此,制定一個既能保持精準灌溉,又能根據實地盆栽環境調節控制參數的灌溉系統,勢在必行。
在農業灌溉技術中,模糊控制作為應用比較廣泛的方法之一,近年來灌溉技術的不斷發展,又產生了各類技術結合模糊控制的灌溉方案。楊昊[5]設計了基于BP神經網絡和模糊控制的智能灌溉系統,李嵩等[6]設計了基于PSO優化Fuzzy_PID的精量水肥灌溉機,劉斌等[7]設計了基于Smith預估模糊控制的溫室灌溉系統,馮兆宇等[8]設計了基于灰色神經網絡與模糊控制的寒地水稻灌溉系統。以上系統結合了實地應用作物環境的特點,針對進行了算法設計與改進,解決了灌溉過程中的不確定性與時滯性,實現精準灌溉的要求。本文結合以上研究成果的經驗,設計一種基于模糊控制并能夠實時調節自身控制參數的灌溉算法,在保證精準灌溉的基礎上,同時能夠適應不同的實地盆栽環境。
1 灌溉系統軟件設計
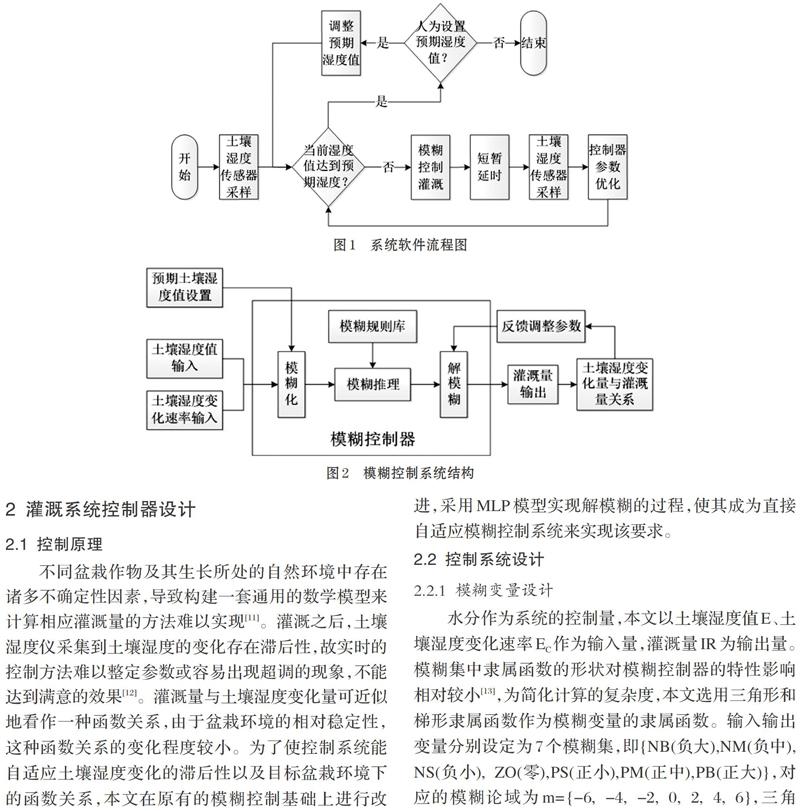
盆栽作物的生長受光照強度、溫濕度、土壤含水率等環境因素的影響,其中土壤含水率能夠直接影響到作物生長[9]。本文主要研究土壤含水率對作物生長的影響,灌溉系統通過傳感器采集的土壤濕度值,計算出土壤濕度變化速率,根據模糊規則推理出相應的灌溉量,并在每輪灌溉結束后,優化模糊控制器的控制參數。系統軟件流程圖如圖1所示。
本模糊控制系統為雙輸入單輸出的模糊控制系統,以土壤濕度、土壤濕度變化速率作為輸入量,灌溉量作為輸出量[10]。系統通過土壤濕度實際變化值反饋于模糊控制器,調整模糊化過程中的控制參數,進而增大或減小指定土壤濕度變化值所需的灌溉量,適應當前盆栽環境下,灌溉量與對應的土壤濕度變化量的特點。模糊控制系統總體結構如圖2所示。
2 灌溉系統控制器設計
2.1 控制原理
不同盆栽作物及其生長所處的自然環境中存在諸多不確定性因素,導致構建一套通用的數學模型來計算相應灌溉量的方法難以實現[11]。灌溉之后,土壤濕度儀采集到土壤濕度的變化存在滯后性,故實時的控制方法難以整定參數或容易出現超調的現象,不能達到滿意的效果[12]。灌溉量與土壤濕度變化量可近似地看作一種函數關系,由于盆栽環境的相對穩定性,這種函數關系的變化程度較小。為了使控制系統能自適應土壤濕度變化的滯后性以及目標盆栽環境下的函數關系,本文在原有的模糊控制基礎上進行改進,采用MLP模型實現解模糊的過程,使其成為直接自適應模糊控制系統來實現該要求。
2.2 控制系統設計
2.2.1 模糊變量設計
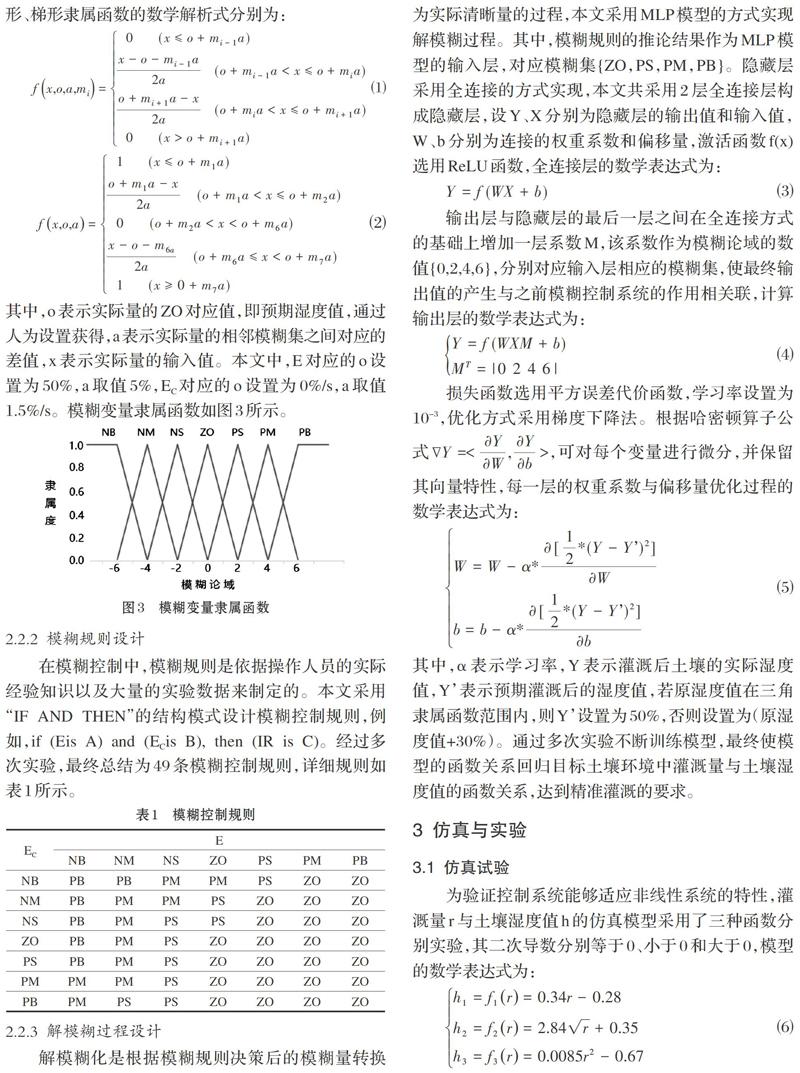
水分作為系統的控制量,本文以土壤濕度值E、土壤濕度變化速率EC作為輸入量,灌溉量IR為輸出量。模糊集中隸屬函數的形狀對模糊控制器的特性影響相對較小[13],為簡化計算的復雜度,本文選用三角形和梯形隸屬函數作為模糊變量的隸屬函數。輸入輸出變量分別設定為7個模糊集,即{NB(負大),NM(負中),NS(負小), ZO(零),PS(正小),PM(正中),PB(正大)},對應的模糊論域為m={-6, -4, -2, 0, 2, 4, 6},三角形、梯形隸屬函數的數學解析式分別為:
其中,o表示實際量的ZO對應值,即預期濕度值,通過人為設置獲得,a表示實際量的相鄰模糊集之間對應的差值,x表示實際量的輸入值。本文中,E對應的o設置為50%,a取值5%,EC對應的o設置為0%/s,a取值1.5%/s。模糊變量隸屬函數如圖3所示。
2.2.2 模糊規則設計
在模糊控制中,模糊規則是依據操作人員的實際經驗知識以及大量的實驗數據來制定的。本文采用“IF AND THEN”的結構模式設計模糊控制規則,例如,if (Eis A) and (ECis B), then (IR is C)。經過多次實驗,最終總結為49條模糊控制規則,詳細規則如表1所示。
2.2.3 解模糊過程設計
解模糊化是根據模糊規則決策后的模糊量轉換為實際清晰量的過程,本文采用MLP模型的方式實現解模糊過程。其中,模糊規則的推論結果作為MLP模型的輸入層,對應模糊集{ZO,PS,PM,PB}。隱藏層采用全連接的方式實現,本文共采用2層全連接層構成隱藏層,設Y、X分別為隱藏層的輸出值和輸入值,W、b分別為連接的權重系數和偏移量,激活函數f(x)選用ReLU函數,全連接層的數學表達式為:
輸出層與隱藏層的最后一層之間在全連接方式的基礎上增加一層系數M,該系數作為模糊論域的數值{0,2,4,6},分別對應輸入層相應的模糊集,使最終輸出值的產生與之前模糊控制系統的作用相關聯,計算輸出層的數學表達式為:
損失函數選用平方誤差代價函數,學習率設置為10-3,優化方式采用梯度下降法。根據哈密頓算子公式[?Y=],可對每個變量進行微分,并保留其向量特性,每一層的權重系數與偏移量優化過程的數學表達式為:
其中,α表示學習率,Y表示灌溉后土壤的實際濕度值,Y表示預期灌溉后的濕度值,若原濕度值在三角隸屬函數范圍內,則Y設置為50%,否則設置為(原濕度值+30%)。通過多次實驗不斷訓練模型,最終使模型的函數關系回歸目標土壤環境中灌溉量與土壤濕度值的函數關系,達到精準灌溉的要求。
3 仿真與實驗
3.1 仿真試驗
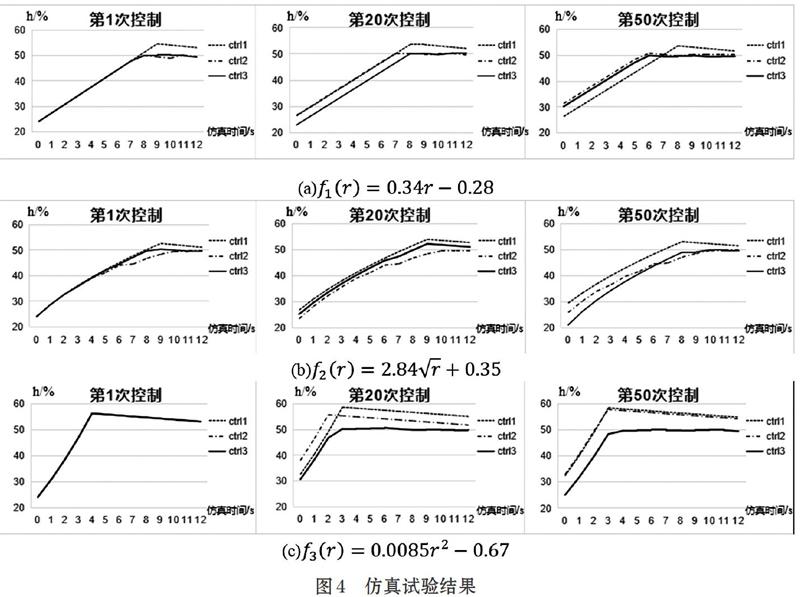
為驗證控制系統能夠適應非線性系統的特性,灌溉量r與土壤濕度值h的仿真模型采用了三種函數分別實驗,其二次導數分別等于0、小于0和大于0,模型的數學表達式為:
設置計算范圍為[0,100],初始值取值范圍為[20,33],為模擬土壤濕度變化的滯后性,將原傳入給控制系統的土壤濕度值減3后再傳入。仿真試驗采用閾值控制ctrl1、模糊控制ctrl2、結合MLP模型的模糊控制ctrl3三種控制方式實現。其中,ctrl2與ctrl3的模糊控制部分的控制方式及參數一致,只是ctrl2的解模糊過程采用了傳統的面積重心法實現,且并不存在反饋調節控制參數的機制。仿真試驗以迭代控制50次為一組,試驗結果如圖4所示。
仿真結果顯示,閾值檢測的控制方式在所有仿真模型中均有明顯的超調現象,可知閾值檢測這類實時性的控制方式不能適應土壤灌溉這種滯后性較強的系統。對于ctrl2和ctrl3,在三種仿真模型中二者控制效果最初沒明顯差距,但在圖(b)第50次控制中,ctrl3完成控制的時間少于ctrl2,以及在圖(c)中第20次控制開始后,ctrl3隨著控制次數的增加逐漸減弱并消除了超調的現象,而ctrl2的方式仍存在超調。
由圖(b)(c)可知,ctrl3控制方式能夠適應[f''r>0]和[f''r<0]的被測模型,根據反饋調整控制系統的參數,增大或減小單次控制的輸出量,使得每輪試驗中減少控制算法的調用次數或降低超調的現象,保證較高的精度。
3.2 實驗結果
為驗證系統的有效性,本文搭建模型進行實地實驗。硬件主控芯片采用STM32F103C8T6微控制器,土壤濕度傳感器選取大連祺峰科技有限公司的SMTS-II-100傳感器,水泵采用直流電機水泵,花盆直徑6cm、高5.8cm,土壤類型為砂質土,STM32通過MAX485并基于Modbus協議獲取傳感器數據。
恒定水泵的灌溉速率,通過改變灌溉時間得到不同的灌溉值,土壤濕度傳感器采集數據間隔時間為1s,目標濕度值設置為50%,允許誤差設置為1%,即當實際濕度值達到49%以上時結束灌溉。通過多次灌溉實驗,記錄土壤濕度傳感器采集的濕度值,分析土壤濕度變化值和灌溉量,驗證控制系統的性能。實驗數據如表2所示,系統性能數據如表3所示。
由表2、表3可知,基于MLP模型和模糊控制器的控制系統,能夠在每輪灌溉結束后優化自身的控制參數,使得下一輪的控制結果更加接近于目標濕度值,并縮短控制所需時間。其中第三輪控制中濕度值變化有起伏現象,是濕度值變化的滯后性和二次調用控制算法造成的結果。每輪控制的優化比例均在17.9%左右,即系統模型具有穩定性,符合仿真結果的特性。
4 總結
通過計算機仿真和實驗操作表明,基于MLP模型和模糊控制的灌溉系統能夠對盆栽灌溉進行有效控制,根據每次灌溉的結果優化自身的控制參數,直至將灌溉量控制在能夠達到預期濕度值的數值,濕度誤差值小。整個控制過程無需構建相關數學模型,適應盆栽市場中用戶盆栽環境各不相同,從而難以數學建模、系統控制參數不同的特點。經實驗證實,該系統模型滿足實際所需要求。
參考文獻(References):
[1] 張娜.智能花盆技術的研究[D].吉林農業大學,2016:9-12
[2] 李玲,熊曉蕓,王金龍,等.基于時間序列分析的盆栽澆灌智能系統[J].計算機應用,2014.34(S1):120-123
[3] 李松敏,王仰仁,張輝.盆栽負壓灌溉供水規律與效果的試驗研究[J].節水灌溉,2016.3:21-23
[4] 鄧健志,程小輝.智能盆栽澆灌裝置的設計[J].農機化研究,2012.34(5):143-146
[5] 楊昊.基于BP神經網絡和模糊控制的智能灌溉系統設計[D].安徽理工大學,2019:35-48
[6] 李嵩,周建平,許燕.基于PSO優化Fuzzy-PID精量灌溉控制系統設計[J].節水灌溉,2019.3:90-93
[7] 劉斌,謝煜,孫藝哲等.基于Smith預估模糊控制的溫室灌溉決策系統設計[J].中國農機化學報,2019.40(8):149-153
[8] 馮兆宇,崔天時,張志超等.基于灰色神經網絡與模糊控制的寒地水稻灌溉制度[J].灌溉排水學報,2018.37(4):71-79
[9] 王楚.影響多肉植物生長著色環境因素分析[J].農家參謀,2019.1:97
[10] 董瑋.基于Qt精準灌溉系統的設計與實現[D].北京林業大學,2018:33-34
[11] 匡迎春,沈岳,段建南等.模糊控制在水稻節水自動灌溉中的應用[J].農業工程學報,2011.27(4):18-21
[12] 劉洪靜,李黎,高金輝.基于模糊PID控制的節水灌溉智能控制系統設計[J].節水灌溉,2020.2:88-91,95
[13] 謝家興,高鵬,莫昊凡等.荔枝園智能灌溉決策系統模糊控制器設計與優化[J].農業機械學報,2018.49(8):26-32,58