直驅式四足機器人的結構優化設計與研究
2021-10-09 06:58:20劉明源馬建設
中國機械工程 2021年18期
關鍵詞:結構
劉明源 陳 平 馬建設
1.北京科技大學機械工程學院,北京,1000832.清華大學深圳國際研究生院,深圳,518055
0 引言
目前,輪式和履帶式移動機器人應用最為廣泛,履帶式機器人對崎嶇地面的適應力更強一些[1]。20世紀60年代,MOSTER[2]發明了四足步行車Walking Truck,自此以后,以哺乳動物為模型的腿足式機器人便成為研究熱點。一方面,腿足式機器人擁有獨立的落點,可以優化支撐和牽引力,機動性高;另一方面,腿足式機器人可以通過解耦身體和足端軌跡達到主動懸掛的效果,在復雜地形的移動效率明顯高于其他類型移動機器人[3]。
四足機器人的驅動方式主要有液壓驅動、氣動驅動和電力驅動[4],其中,電力驅動可按驅動電機有無含齒輪傳動系統的減速器分為非直驅式和直驅式。2016年,KENNEALLY等[5]首次提出直驅式四足機器人的概念,介紹了直驅式四足機器人高驅動帶寬和機械效率等優點。為了提高奔跑速度,BLACKMAN等[6-7]對直驅式四足機器人的三角形足端軌跡和步態進行優化,研究了腿部姿態對直驅式四足機器人奔跑與跳躍的影響。TOPPING等[8-9]對直驅式四足機器人的雙足姿態進行研究,驗證了直驅式四足機器人在不匹配環境中完成任務的可行性,實現了四足機器人開門與上樓梯動作。通過將直驅式四足機器人的三點足端軌跡優化為四點足端軌跡,AUSTIN等[10-11]將直驅式四足機器人奔跑速度提高了45%,改進的新型直驅式四足機器人甚至能以0.17 m/s的速度攀登垂直墻墻壁。為了選用最佳電機,BROWN等[12]提出基于動力學的一種直驅式四足機器人腿部設計方法。HAARNOJA[13]采用強化深度學習算法,使一輛無初始設定步態的直驅式四足機器人在2 h連續訓練后可穩定行走。
驅動電機的熱量損失、減速器的機械損失、與環境交互的沖擊損失是四足機器人的主要能量損失模式[14]。以Minitaur為代表的直驅式四足機器人舍棄減速器,避免了由其帶來的機械損失,采用簡單的機械結構設計,減小了質量,減少了沖擊損失,控制難度也大大降低[5]。目前,對直驅式四足機器人的結構優化研究都集中于獲得奔跑與跳躍的最佳性能,忽略了結構對能量利用率的影響。為了獲得兼顧能量利用率和穩定性的最優結構參數,筆者對直驅式四足機器人進行機械結構的優化設計,建立五桿同軸腿剛度特性的分析模型,建立五桿同軸腿模型并進行運動學分析,最后搭建直驅式四足機器人實驗平臺進行跳躍和奔跑實驗。
1 直驅式四足機器人的結構優化設計
直驅式四足機器人的結構設計從驅動電機選型開始,由驅動電機的轉矩可推算出腿部連桿的最大尺寸,由腿部連桿的尺寸可推算出身體結構的最小尺寸。
1.1 電機選型
驅動電機選型應遵從熱量損失小、質量小、半徑小、轉矩大的原則。熱比轉矩
(1)
式中,Kt、m、Rth、R分別為驅動電機的轉矩常數、質量、線圈熱阻和線圈電阻。
熱比轉矩表示驅動電機在峰值轉矩下的熱耗散能力,其值越大,電機熱量損失越小。為防止驅動電機半徑過大造成的腿部有效活動空間過小,驅動電機的熱比轉矩與半徑的比值不應小于4.39 N·m/(kg/K)[5]。
選用T-MOTOR公司研發的R16型盤式無刷電機,可得驅動電機的熱比轉矩與半徑之比值為5.294 N·m/(kg/K),符合選型要求。
1.2 腿部結構設計
如圖1所示,直驅式四足機器人的五桿同軸腿機構由2個驅動電機、1個對軸連接件、2個大腿連桿、2個小腿連桿和1個腳掌組成。將2個驅動電機安裝在機器人身體上,使腿部連桿質量盡可能小,以確保符合彈簧倒立擺模型的無重腿假設,方便分析、控制[15]。
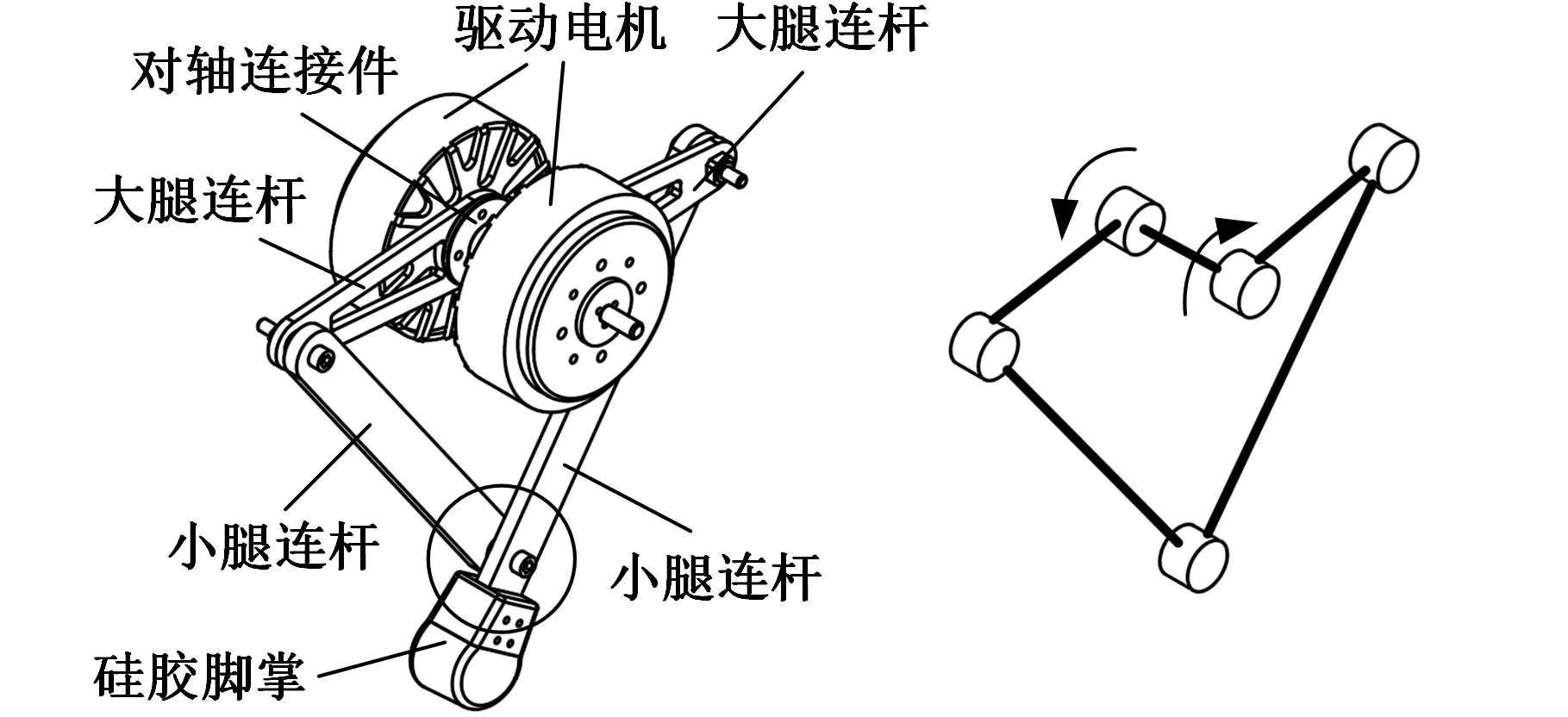
(a)機構組成 (b)機構簡圖
驅動電機之間的對軸連接件用來保證腿部大腿連桿旋轉軸的同軸度。電機轉子和定子之間的氣隙極小,在承受大沖擊時,對軸連接件可使電機機械結構保持穩定。連桿之間采用細牙螺栓、微型推力球軸承、絲杠軸承鎖緊螺母鉸接,鉸接處涂覆潤滑脂以減少機械磨損。腳掌由E605型液態人體硅膠(黏度3000 MPa·s,邵氏硬度(5±2)HA,撕裂強度(8±2)kN/m,伸長率400%)倒模而成,可有效地減少足端打滑的情況。
1.2.1剛度特性分析
直驅式四足機器人的足端在執行相同的規劃軌跡時,電機的驅動帶寬(電機有效工作的信號頻段)和腿部剛度是影響足端運動軌跡穩定性的兩個主要因素。相比于非直驅式四足機器人,輸入相同頻率正弦電壓信號時,直驅式四足機器人的靈敏度更高。四足機器人運動得越快,執行一個周期足端軌跡的時間越短。非直驅式四足機器人的驅動電機會在未達到當前指定位置時就轉向下一個指定位置,足端軌跡產生偏差。直驅式四足機器人驅動電機沒有減速器,可穩定工作的速度上限更大。運動過程中,機器人足端受力超過極限,使腿部結構發生變形。腿部剛度越小,腿部變形量越大,足端位置偏移越大,實際足端軌跡與理論上穩定的足端軌跡差異越大,四足機器人的運動越不穩定,較大的腿部剛度可以減小腿部的變形量。
簡化腿部模型如圖2所示,定義桿長OA=OB=l1,AC=BC=l2,∠AOC=∠BOC=φ,∠OAC=∠OBC=θ。五桿同軸腿的剛度主要取決于結構參數l1、l2、φ、θ。足端腳掌的結構不可變,剛度特性分析時可以不考慮。
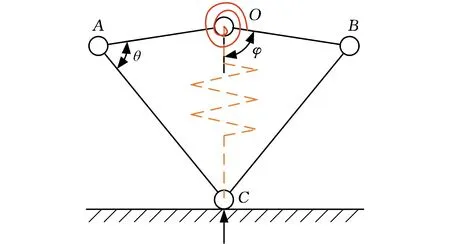
圖2 剛度特性模型
引入彈簧負載倒立擺模型,定義無質量彈性虛擬腿長OC=l,地面作用力為F。將恒定轉矩為τ的驅動電機看作剛度系數(定值)為c的扭簧,定義扭簧和對應連桿的初始角度為φ0、無質量彈性虛擬腿的初始長度為l0。將不同長度無質量彈性虛擬腿的地面作用力F與10%壓縮程度時的地面作用力F10%進行比較,得到五桿同軸腿的剛度特性:
(2)
Δl=l-l0τ=cΔφΔφ=φ-φ0
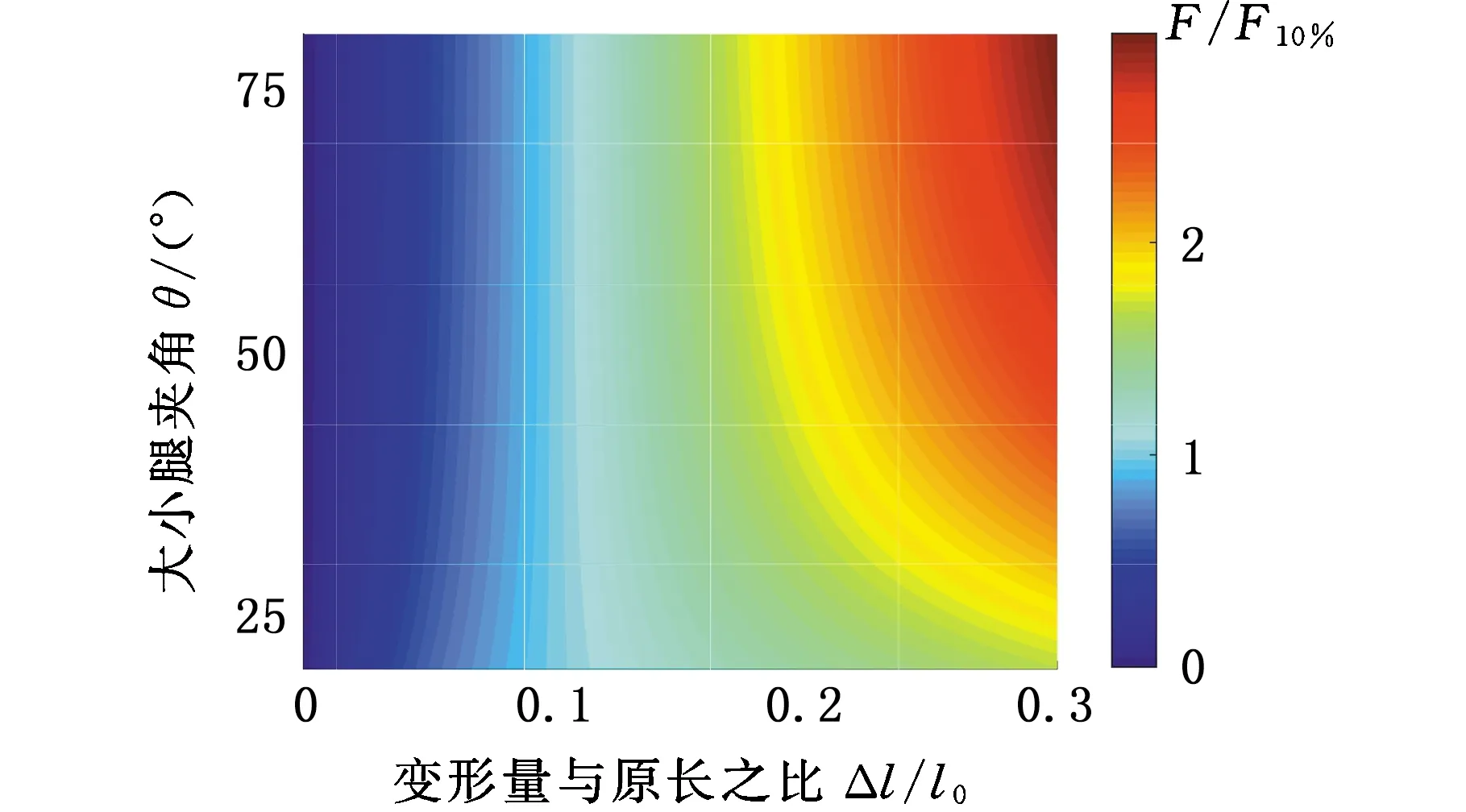
在直驅式四足機器人消耗相同能量且l1、l2一定的條件下,比較運動過程中A、B兩點在O點下方和上方的穩定區域。大腿連桿平衡位置在O點下方時,機器人穩定域最大[7],即φ<90°時的四足機器人相對比較穩定。因此設定φ為20°、40°、60°、80°,觀察五桿同軸腿在桿長比l2/l1為1、2、2.5時的剛度特性曲線(圖3),得仿真結果如圖4所示。
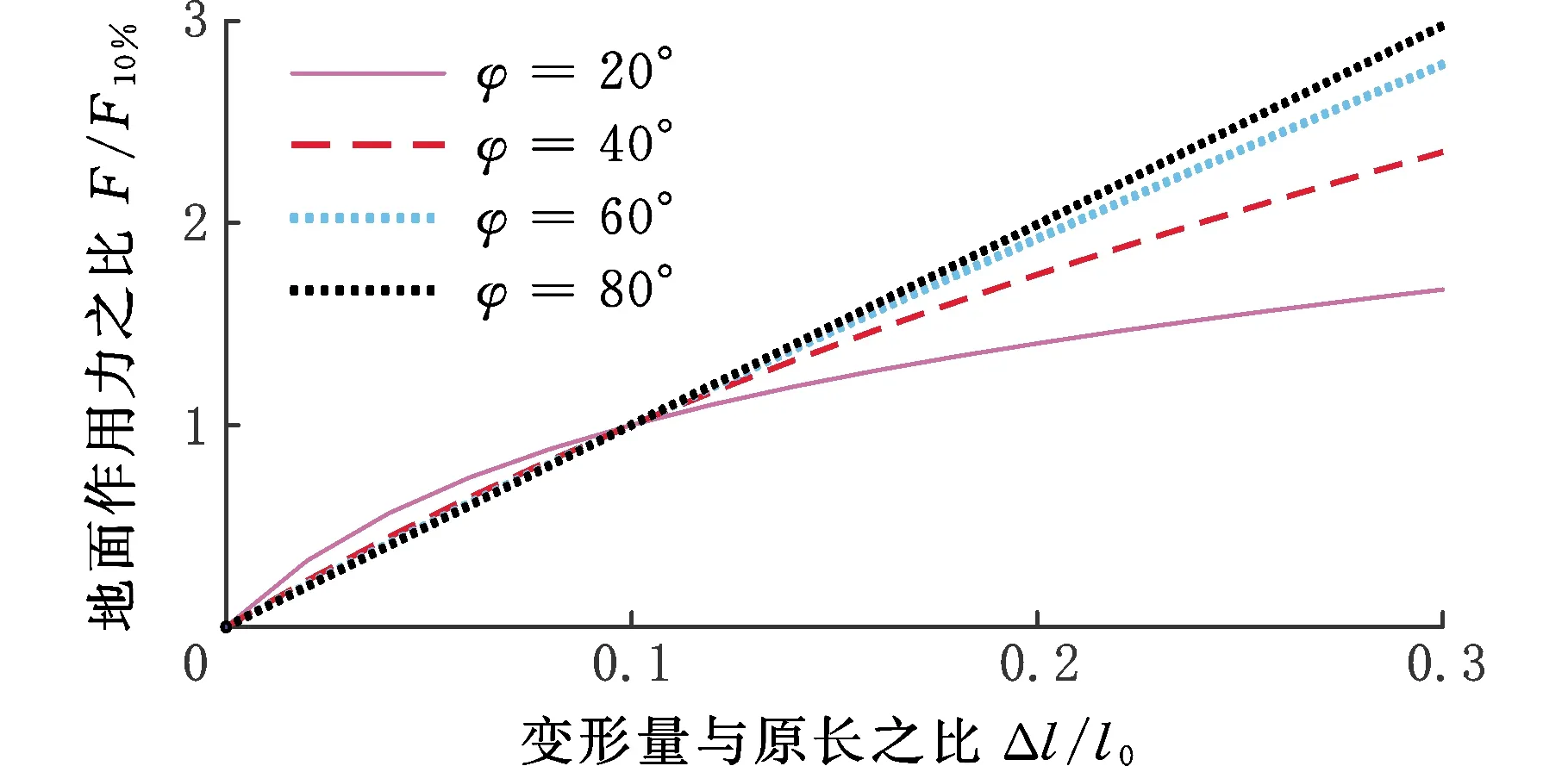
(a)l2/l1=1
由圖3、圖4可知,l2/l1一定且Δl/l0>0.1時,隨著φ的增大,腿部變形Δl所需的地面作用力F增大,腿部剛度特性越好。在結構無法改變的情況下,考慮直驅式四足機器人的運動穩定性和控制精度,φ的最優區間為[80°,90°]。φ一定且Δl/l0>0.1時,隨著l2/l1的增大,F/F10%增大,腿部剛度特性越好。大桿長比會減小足端有效活動空間,對電機的峰值轉矩的要求也會提高。對比圖3b、圖3c發現,φ=60°時,l2/l1從2增長到2.5,剛度特性曲線相差不大。在l2/l1增大到一定值時,由增大l2/l1帶來的腿部剛度增量會逐漸減小。
(a)l2/l1=1
1.2.2結構優化分析
為得出五桿同軸腿能量利用率最優的桿長比,選取耗能最大的一維豎直跳躍動作,借助ADAMS平臺進行結構優化仿真分析。優化設計的目標函數是五桿同軸腿在一維豎直跳躍運動中所消耗的能量,優化變量為l2/l1。如圖5所示,將整個跳躍運動分為兩部分:第一階段是由初始姿態(圖5a)到起跳姿態(圖5b),電機轉動使腿部姿態角由φ0變為φ1,消耗一定能量;第二階段是由起跳姿態(圖5b)到騰空姿態(圖5c),此時腿部姿態角φ1不變,不消耗能量,身體位置變化至最大高度hmax。
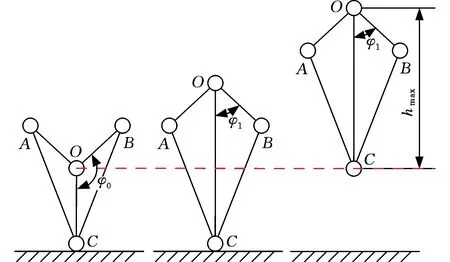
(a)初始姿態 (b)起跳姿態 (c)騰空姿態
設定腿部姿態角φ0和φ1為定值,目標函數為第一階段2個驅動電機所需的主動轉矩:
(3)
式中,τ1、τ2分別為兩個電機的轉矩。
在ADMAS中建立仿真模型,設定不變量l1=100 mm,通過改變l2使桿長比由1.48變化至2.94,考慮結構不干涉的最大腿部姿態角變化值,設置仿真參數φ0=150°、φ1=30°,桿OA、OB的密度為2700 kg/m3。

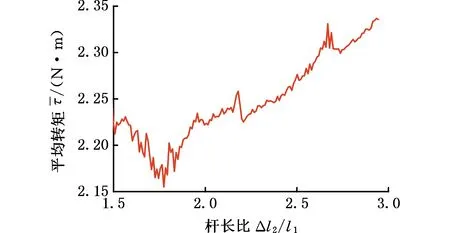
(a)跳躍平均轉矩

1.3 身體結構設計
為減少機器人的沖擊能量損失,直驅式四足機器人的主體在保證結構穩定的情況下,質量應盡可能小。
Minitaur四足機器人的身體結構采用數塊鋁合金板拼接而成[6],鋁合金板材在受到沖擊時容易變形,不易恢復。將8根碳纖維方管穿插在4塊碳纖維橫梁板中,用POM材質的小塊進行限位,在連接處采用1309丙酸結構AB膠加固,保證身體框架的一體性,優化后的結構如圖7所示。ANSYS中設置的仿真參數如表1所示,簡化腿部結構為一個鋁材連接件,身體結構尺寸與前文中的結構尺寸相同,每個足端豎直方向受力均為50 N時的仿真結果如圖8所示,Minitaur身體結構最大變形量為0.019 mm、鋁材優化身體結構最大變形量為0.017 mm、碳纖維優化身體結構的最大變形量為0.006 mm。相比于鋁合金板材拼接的框架結構,碳纖維材料結構的整體剛度更大、結構更簡單、質量更小。
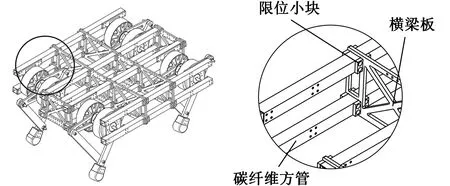
(a)整體結構 (b)局部放大圖
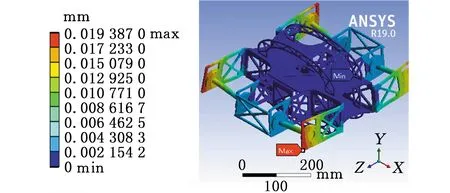
(a)Minitaur身體結構
受加工誤差、裝配誤差和控制誤差等影響,直驅式四足機器人的4條腿在站立或行走時,無法長時間絕對垂直于地面。直驅式四足機器人在直線行走過程中發生側傾時,身體會向傾斜方向小幅轉動,由誤差造成的轉向趨勢會使機器人偏離預定的行動軌跡。為防止各種誤差引起的不必要轉向,使直驅式四足機器人足端落點在身體垂直投影之外,此時的腿部受力如圖9所示。定義腿部偏轉角度為δ,足端受力50 N、腿部姿態角為90°、l1為100 mm時的腿部電機作用力矩與橫梁偏角的關系如圖10所示。δ從0°增大到5°時,作用力矩由2.50 N·m變為2.51 N·m。δ>5°后,作用力矩增大迅速,極大地增大了電機的工作載荷,故偏角應控制在2°~5°。δ=3°時,機器人身體結構中的橫梁板如圖11所示。
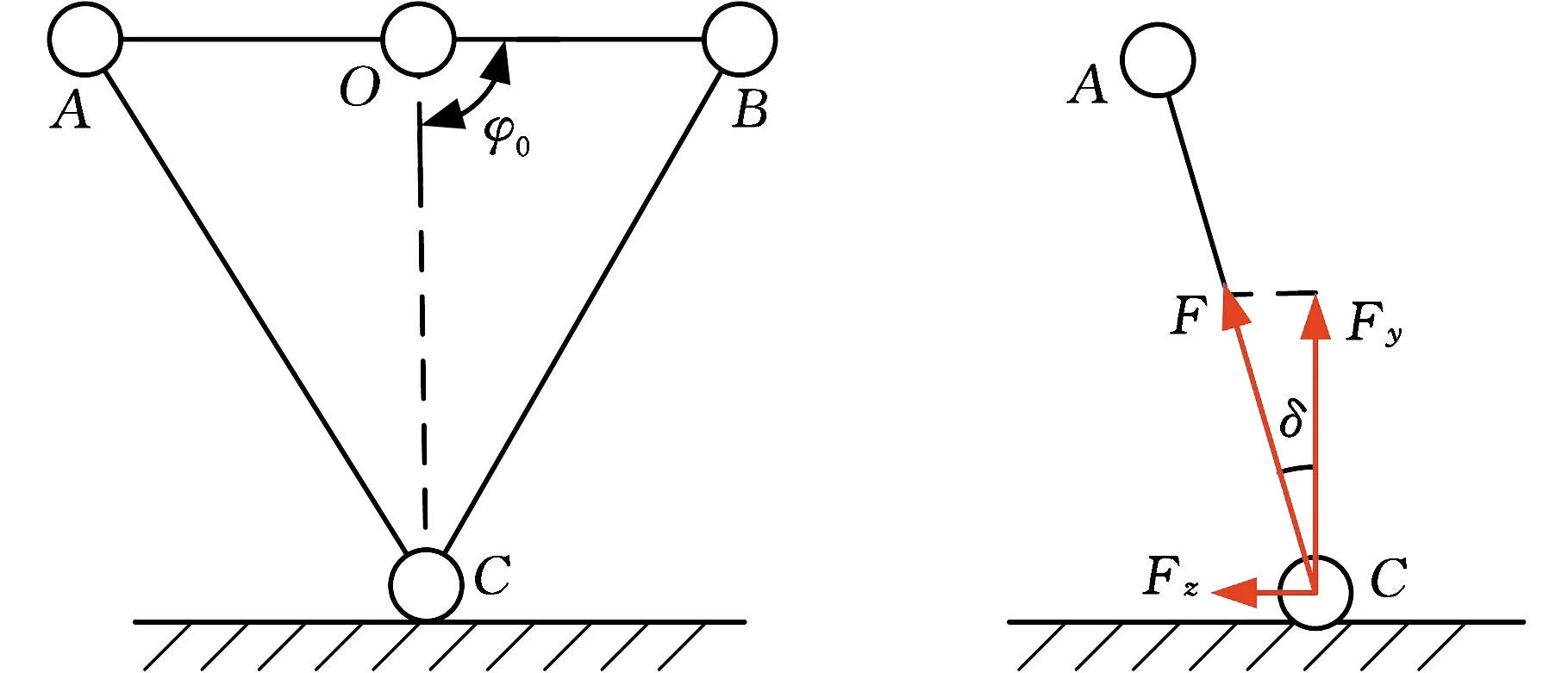
(a)正視圖 (b)側視圖
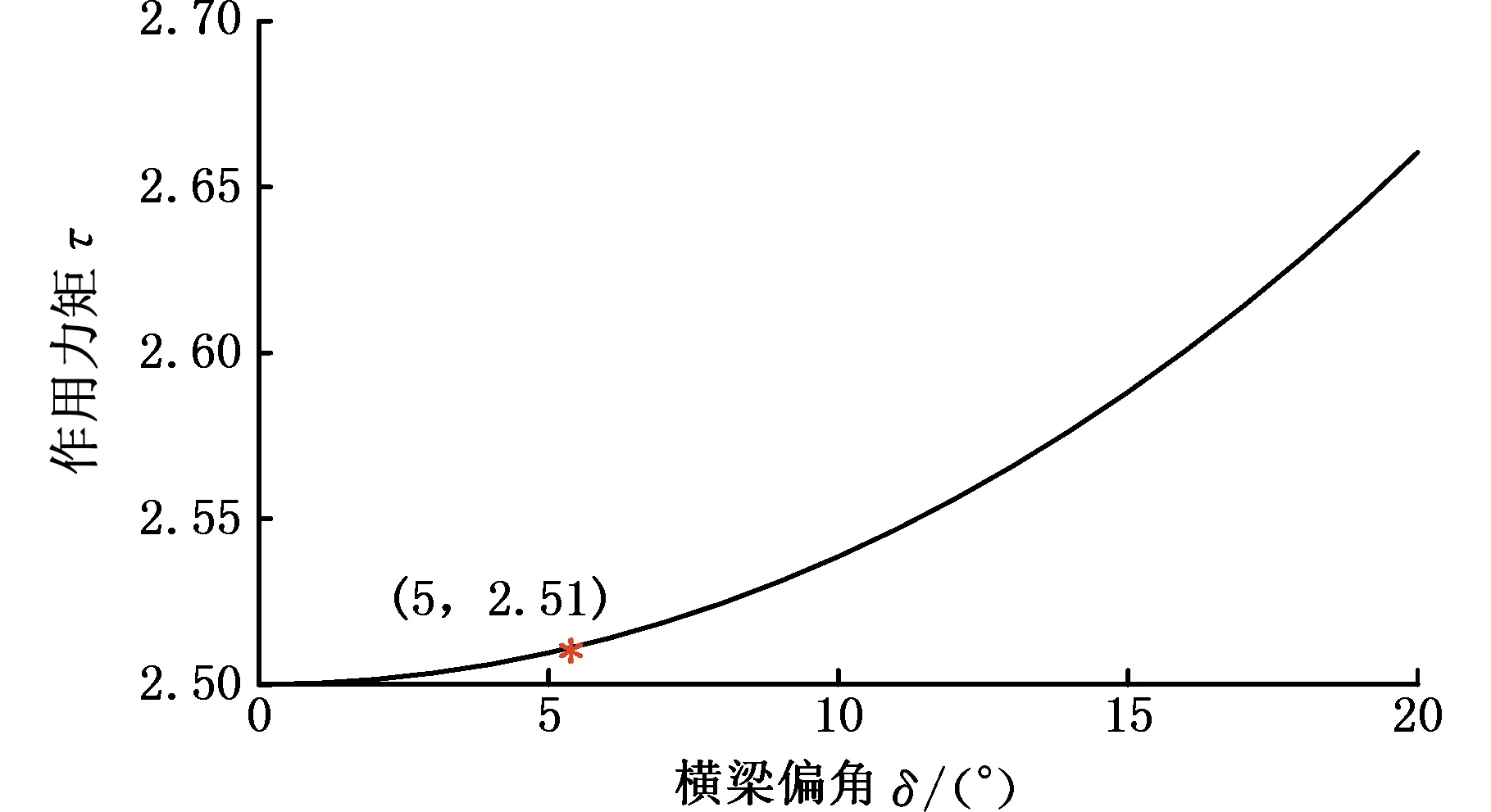
圖10 偏角與作用力矩關系圖
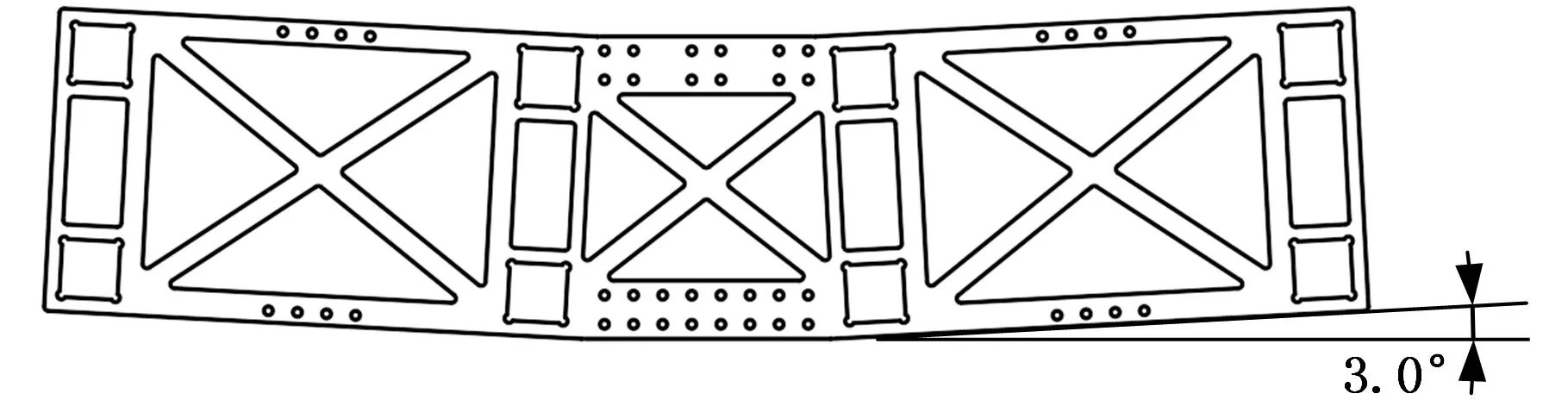
圖11 橫梁板
2 直驅式四足機器人的運動學分析
單腿的運動特性可以反映對角小跑步態下四足機器人的整體運動特性。采用對角小跑步態的四足機器人在絕大部分的時間里,同一時刻只有對角的兩只腳著地,將對角的兩只腿看作一只虛擬腿,則四足機器人的步態可以映射為雙足機器人的單腿步態。由直驅式四足機器人的正向運動學分析可得驅動電機電流和足端支撐力的關系,由逆向運動學分析得到的驅動電機轉動角度與足端位置的關系是機器人位置控制算法的基礎。
2.1 正向運動學分析
省略直驅式四足機器人的身體軀干,建立OXY坐標系,可得五桿同軸腿機構運動簡圖(圖12)。若OA=OB,AC=BC,則認為腿部機構對稱。相比于不對稱的腿部結構,對稱的五桿同軸腿在驅動電機相同的情況下可承受更大的地面反力,在足端支撐力相同的情況下,驅動電機產生熱量更小[14],即能量損耗更小,所以采用對稱設計。其中,OA=OB=l1,AC=BC=l2,CD=l3。
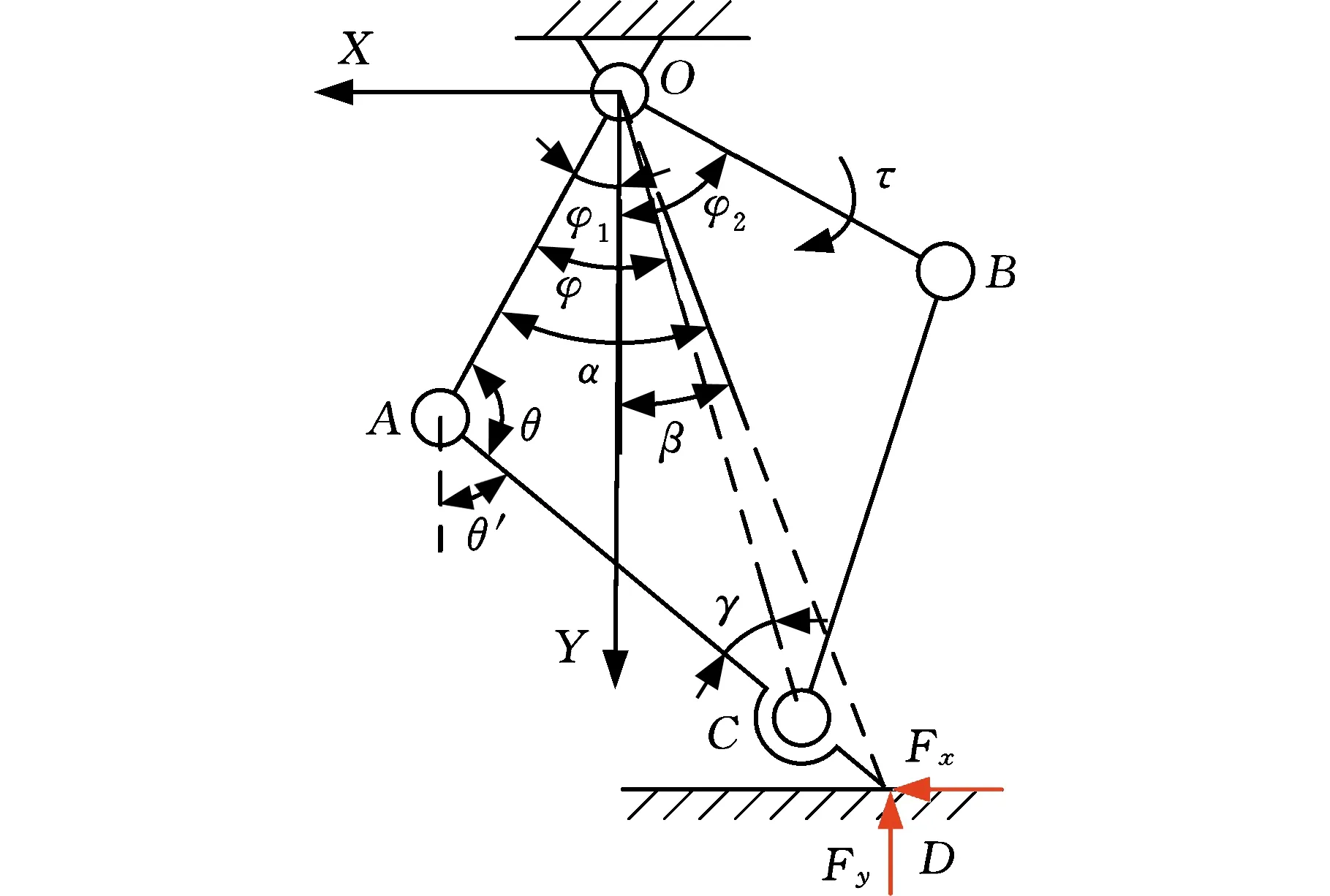
圖12 五桿同軸腿機構運動簡圖
定義OA與Y軸的夾角為φ1,OB與Y軸的夾角為φ2,則C、D兩點的坐標分量為
(4)
對足端位置D點坐標微分可得
(5)
式中,J為五桿同軸腿的雅可比矩陣。
定義五桿同軸腿2個驅動電機的力矢量為τ,虛位移為?α,足端的作用力矢量為F,虛位移為?D,由虛功原理可得
τT?α-FT?D=0
(6)
?D=J?α
五桿同軸腿足端力向驅動電機扭矩映射的線性關系可表示為
(7)
定義驅動電機的扭矩常數為Kt,電機的有效電流為I,可得足端受力與驅動電機有效電流的線性關系如下:
(8)
通過實時獲取電機驅動器的有效輸出電流,依靠式(8)分析得到足端的有效支撐力,可提高直驅式四足機器人對路面障礙的檢測能力和足端受力的檢測精度,降低控制的難度。
2.2 逆向運動學分析
一般情況下,直驅式四足機器人的控制是先規劃好足端軌跡,再根據逆向運動學解出驅動電機的角度φ。如圖12所示,已知足端D點坐標(xD,yD),定義OD和Y軸的夾角為β,考慮直驅式四足機器人在運動過程中yD>0恒成立,可得直驅四足機器人的位置控制算法數學模型:
(9)
將對角兩條腿視為一組,使兩組腿部的運動周期差為足端軌跡一個完整周期的1/2,即可實現對角小跑步態。
3 奔跑與跳躍實驗
采用碳纖維優化身體結構和對稱五桿同軸腿結構搭建直驅式四足機器人實驗平臺,選用STM32單片機、CAN-USART轉接板和開源ODrive電子調整器的控制系統如圖13所示。ODrive電子調整器的額定電壓48V,最大持續輸出電流60A。電機背面安裝AMT-103型增量電容式模塊化編碼器來反饋電機位置信息。
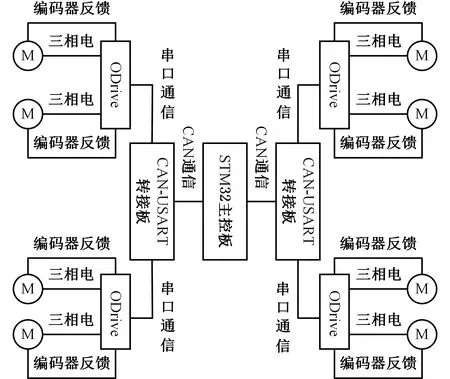
圖13 控制系統框圖
3.1 奔跑實驗
設定步態參數如表2所示,采用對角小跑步態進行圖14所示的直線奔跑,直線奔跑的平均速度可達1.05 m/s。運動過程中,身體軀干的晃動少,運動軌跡非常接近直線,穩定性較好。
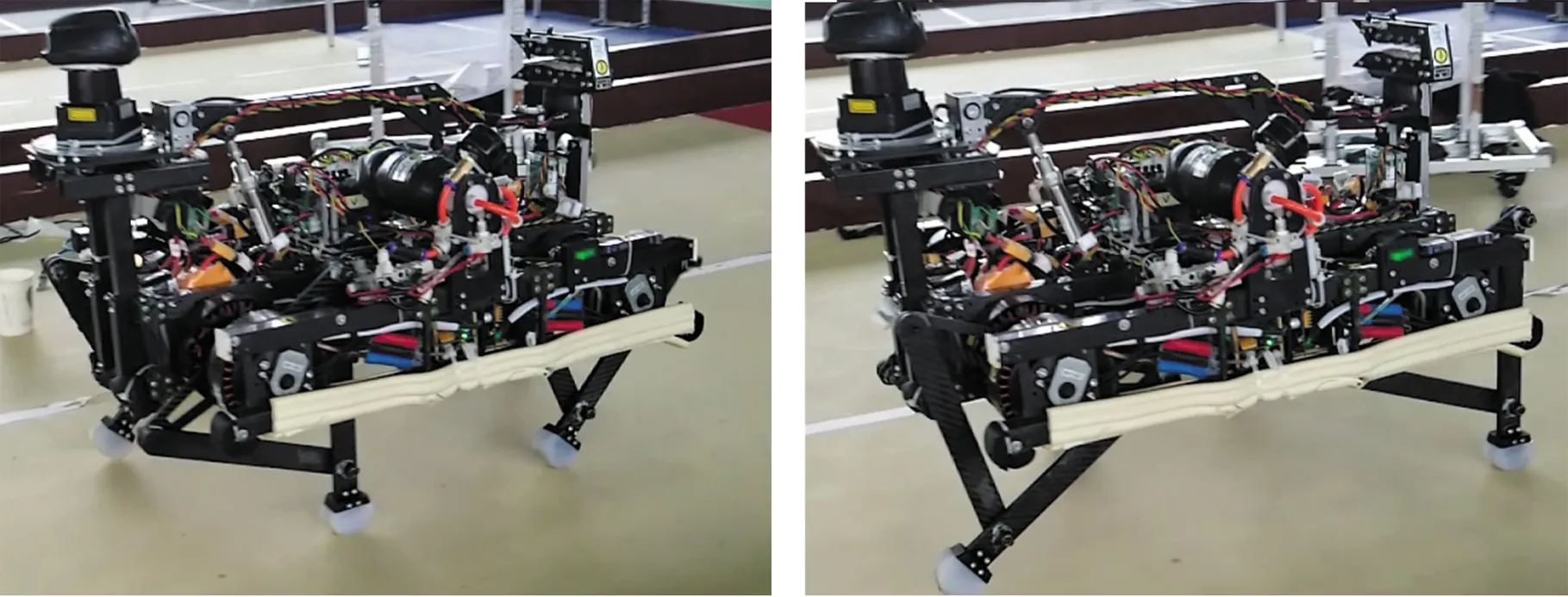
(a) (b)
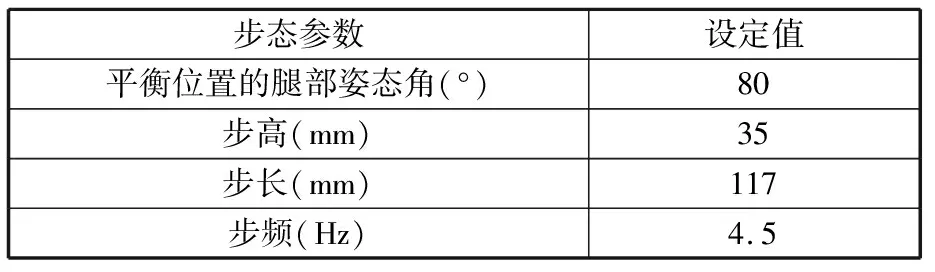
表2 步態參數
3.2 跳躍實驗
設定腿部姿態角變化初始值φ0為120°,終值φ1為60°,進行圖15所示的跳躍運動,最大跳躍高度為380 mm。
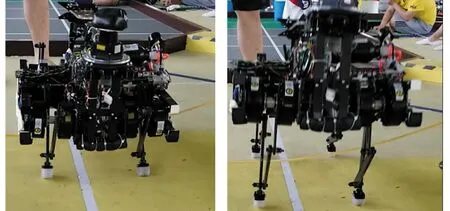
(a) (b)
4 結論
通過對直驅式四足機器人的理論分析、仿真和實驗驗證,可以得到以下結論:影響直驅式四足機器人穩定性的主要結構參數為腿部姿態角、腿部桿長比、身體結構剛度,影響直驅式四足機器人能量利用效率的主要參數為驅動電機的熱比轉矩、腿部桿長比。當腿部姿態角小于90°時,增大腿部姿態角可以優化腿部剛度特性,腿部桿長比的增大也可以優化腿部的剛度特性,但當桿長比大于1.772時,跳躍高度下降、跳躍平均轉矩增大,即能量利用效率降低。優化設計的Minitaur直驅式四足機器人可以實現1.05 m/s的奔跑和380 mm豎直跳躍,驗證了結構設計的可行性。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
