基于UWB+LoRa的料堆環境監測系統
2021-10-10 02:56:44孟慶志
物聯網技術 2021年9期
孟慶志,劉 庚
(濟南祥控自動化設備有限公司,山東 濟南 250101)
0 引 言
封閉料場中的料堆,如煤堆、糧食堆、秸稈垛、煙草堆垛等,由于長時間堆放、堆內通風性差等原因,溫度容易升高,導致自燃、霉變、釋放有毒有害氣體等,給企業造成經濟損失[1-3]。因此,對料堆表面及內部進行實時精確定位監測很有必要。
物聯網技術的發展與應用,為料堆實時精確定位監測提供了更多技術選項。超寬帶(UWB)技術采用極窄的脈沖信號進行信息傳遞,無需使用載波信號進行調整,由于其特殊的通信方式,其定位精度可達厘米級,相較于紅外線、射頻收發、WiFi、ZigBee、視覺定位等室內定位技術,UWB定位具有高定位精度、高穿透力、高時間分辨率和較強的抗多路徑能力等優點[4-5]。
在低功耗廣域網(LPWAN)產生之前,遠距離和低功耗兩者只能有取舍。LoRa是LPWAN通信技術中一種基于擴頻技術的超遠距離無線傳輸方案。LoRa技術具有遠距離、低功耗、多節點、低成本等特性,改變了以往關于傳輸距離與功耗的折衷考慮方式,為用戶提供了一種簡單的能實現遠距離、延長電池壽命、大容量的系統,擴展了傳感網絡[6]。
本文運用UWB室內無線定位技術和LoRa無線傳輸技術,設計了一種料堆環境監測系統,以實現靈活改變料堆監測位置、即插即獲取環境數據、可靠無線傳輸和精確坐標定位等環境監測功能。
1 系統設計
料堆環境監測系統主要包括智能無線探桿、UWB定位基站、現場監控主機和上位機。系統拓撲結構如圖1所示。
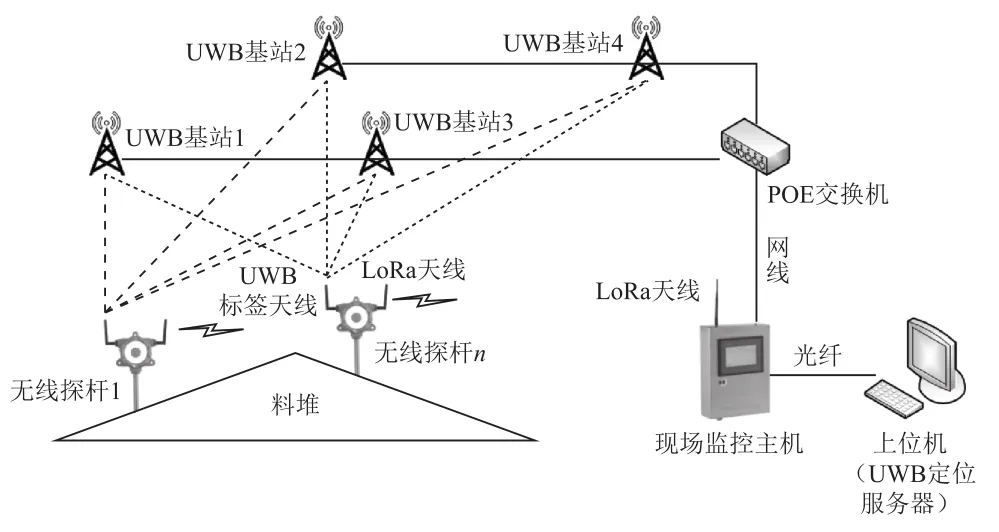
圖1 系統拓撲結構
智能無線探桿用于采集料堆環境數據,并將數據通過LoRa無線模塊傳輸至現場監控主機,同時通過UWB定位標簽向UWB定位基站發送通信幀。
UWB定位系統由UWB定位標簽、UWB基站和定位服務器組成。UWB基站安裝在封閉的料場室內頂部,基站位置和定位精度強相關,需要進行精準測量校正。
基站通過POE交換機和現場監控主機的光端機將定位數據傳輸至上位機。上位機兼具UWB定位服務器的功能,可通過定位算法解算出每個無線探桿的精確位置坐標。
現場監控主機實時接收、處理和顯示各無線探桿上傳的傳感器數據,并將環境數據傳輸至上位機,同時讀取上位機解算出的各無線探桿的位置坐標數據。
2 硬件設計
2.1 智能無線探桿設計
智能無線探桿采用不銹鋼探桿和表頭結構。不銹鋼探桿內有多個溫度傳感器節點,使用時可將不銹鋼探桿插入料堆內部,實現料堆內部測溫。探桿末端可集成溫濕度傳感器,用于需要測量料堆內部濕度或水分含量的場合。對于需要測量料堆表面釋放有毒有害氣體濃度的場景,可將不銹鋼探桿更換成氣體傳感器探頭。
無線探桿由微控制器、溫濕度傳感器接口、溫度傳感器接口、氣體傳感器接口、電池管理單元、觸發按鍵接口、LoRa通信模塊、UWB定位標簽模塊組成,硬件結構如圖2所示。
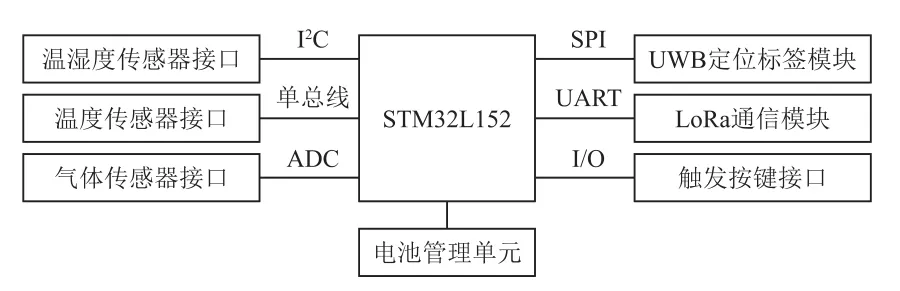
圖2 智能無線探桿硬件結構
微控制器選用意法半導體公司出品的STM32L152超低功耗單片機,該單片機內部集成有低功耗實時時鐘(RTC)和一組在待機模式下仍然通電的備份寄存器,用于芯片定時喚醒。集成的LCD控制器有一個內置的LCD電壓發生器,允許驅動多達8個多路LCD,方便數據顯示。
無線探桿采用可充電鋰電池供電,電池管理單元用于電池充放電,以及各傳感器接口、LoRa通信模塊、UWB定位標簽模塊的低功耗省電管理。
探桿設計有外部觸發按鍵接口,可實現外部實時喚醒和實時時鐘定時喚醒2種軟件喚醒模式。
2.1.1 傳感器接口設計
傳感器接口設計有溫濕度傳感器接口、溫度傳感器接口和氣體傳感器接口,可根據實際項目功能要求更換傳感器探頭類型。
溫濕度傳感器接口支持瑞士ScnSirion公司出品的SHT11數字溫濕度傳感器芯片,該芯片同時集成有溫度和濕度傳感器,可提供溫度補償的濕度測量值和高質量的露點計算功能。芯片在測量和通信結束后自動轉入低功耗模式。
溫度傳感器接口支持DS18B20溫度傳感器多節點工作模式,可實現料堆內部多個位置的溫度測量。DS18B20溫度傳感器為美國DALLAS公司出品的支持多點組網功能的數字溫度傳感器芯片,芯片采用先進的單總線數據通信方式,多個DS18B20可并聯在唯一的三線接口上,實現多點組網測溫。芯片測溫范圍為-55~125 ℃,在-10~85 ℃時精度可達±0.5 ℃,可滿足絕大多數料堆的溫度測量要求。
氣體傳感器接口采用模擬量輸入方式,可通過更換氣體探頭實現CH4、CO、CO2、PH3等常見料堆釋放氣體類型的濃度檢測。
2.1.2 LoRa模塊設計
LoRa模塊采用有人物聯網公司出品的WH-L101-L模塊。模塊支持點對點通信協議,可實現UART轉LoRa數傳功能;傳輸距離可達3 500 m;支持低功耗工作模式;接收靈敏度可達-138.5 dBm,接收靈敏度高,抗干擾性強;支持數據加密傳輸,安全性高;支持AT指令配置,內置看門狗,穩定運行不死機;小尺寸SMT封裝,便于嵌入使用。LoRa模塊接口電路如圖3所示。
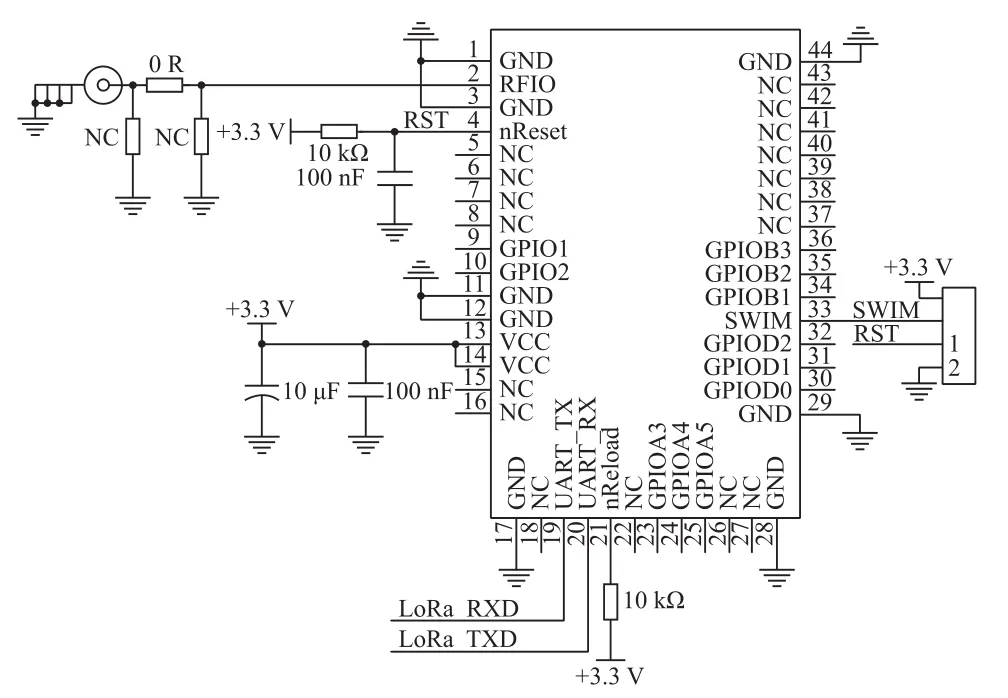
圖3 LoRa模塊接口電路
2.1.3 UWB定位標簽設計
UWB定位標簽選用DWM1000模塊,模塊基于Decawave公司出品的DW1000 超寬帶收發芯片,并將天線、全射頻電路、電源管理和時鐘電路集成在一個模塊上,可用于雙向測距或時差(TDOA)定位系統,實現10 cm精度定位,支持高達6.8 Mb/s數據傳輸[7-8]。
UWB定位標簽模塊集成在智能無線探桿內部采集電路板上,其向周圍發送納秒級脈沖信號,固定安裝在周圍的UWB基站接收并測量上述脈沖信號,經過濾波等處理,各自計算得到脈沖信號的到達時刻等定位測量信息。UWB定位標簽模塊接口電路如圖4所示。
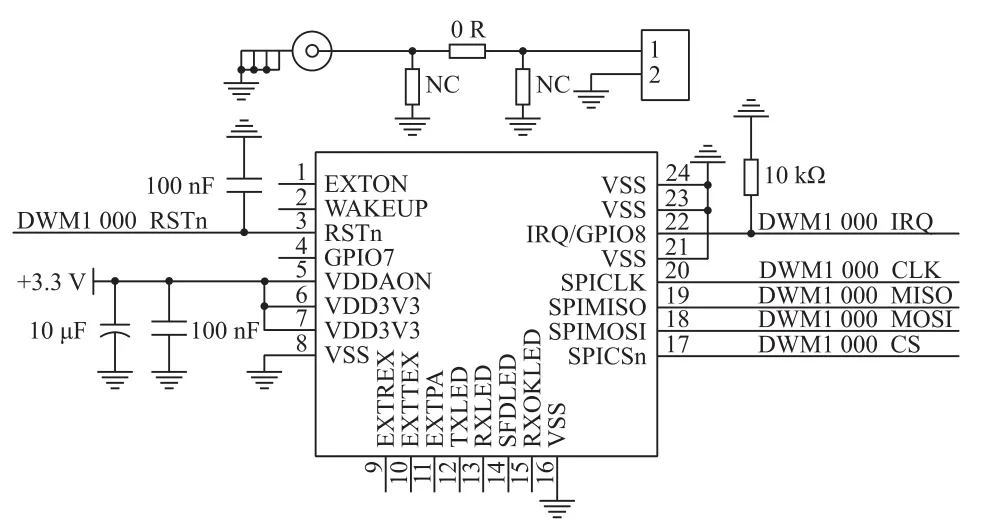
圖4 UWB定位標簽模塊接口電路
UWB定位基站選用市面上采用DW1000 超寬帶收發芯片技術的成熟定位基站,以實現與UWB定位標簽的性能適配。
2.2 現場監控主機
現場監控主機硬件結構如圖5所示,主要包括電源管理單元、控制板、觸摸屏顯示器、聲光報警接口、上位機通信接口、LoRa通信模塊和功能按鈕接口。
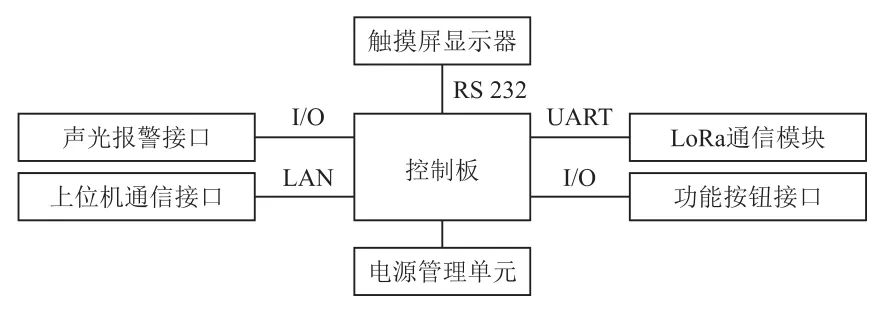
圖5 現場監控主機硬件結構
控制板通過LoRa通信模塊接收各無線探桿上傳的傳感器數據,并通過上位機通信接口定時從上位機讀取各無線探桿的位置坐標信息和響應上位機的探桿數據讀取命令。當探桿傳感器數據超出報警閾值時,控制板啟動主機聲光報警器進行超限聲光報警。
觸摸屏顯示器實時讀取控制板數據寄存器區的各無線探桿的傳感器數據和定位數據,并進行畫面顯示。觸摸屏顯示器通過存儲卡實現數據存儲,可進行歷史報警記錄、歷史數據及趨勢圖查看等。
現場監控主機可通過功能按鈕執行切換畫面、報警確認、就地手動控制等操作。
3 軟件設計
3.1 無線探桿軟件設計
無線探桿軟件流程如圖6所示。探桿上電后首先進行系統時鐘、RTC實時時鐘和各模塊初始化,然后傳感器進行數據采集,并通過LoRa通信模塊將傳感器數據上傳至現場監控主機,通過UWB定位標簽向料場內的基站發射探桿位置信號,隨后無線探桿進入休眠模式。
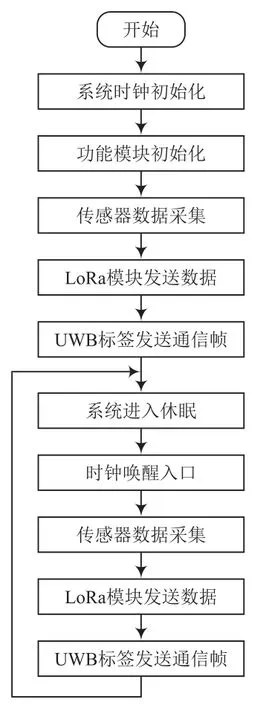
圖6 無線探桿軟件流程
休眠期間,微控制器內集成的低功耗實時時鐘持續計時,每次計時周期結束后,實時時鐘自動喚醒微控制器,微控制器被喚醒后從實時時鐘喚醒入口繼續執行傳感器數據采集、LoRa無線傳輸、UWB定位信號發送等程序,程序執行完畢后再次進入休眠模式,等待下一次計時周期喚醒。
3.2 通信喚醒機制
為滿足低功耗要求,最大限度延長電池使用時間,無線探桿每次通信結束后自動進入休眠狀態,同時將各傳感器接口、LoRa模塊接口和UWB定位標簽接口斷電。系統設計有2種喚醒通信機制:外部按鍵中斷觸發喚醒和RTC實時時鐘定時喚醒。
外部按鍵中斷觸發喚醒:通過外部按鍵中斷觸發微控制器立即喚醒,繼續執行程序,對于需要即時獲取料堆監測點傳感數據和定位信息的應用,可執行外部按鍵中斷觸發喚醒機制。
RTC實時時鐘定時喚醒:通過微控制器內部集成的RTC模塊執行定時喚醒程序,執行完畢后,重新進入休眠狀態。
3.3 UWB無線定位算法
按照測量參數的不同,UWB的定位方法可以分為接收信號強度法(RSSI )、到達角度法(AOA)、到達時間法(TOF)和到達時間差法(TDOA)等[9-10]。
TDOA定位是一種利用時間差進行計算的方法。精準的絕對時間相對較難測量,通過比較信號到達各UWB定位基站的時間差,計算出信號到各定位基站的距離差,即可做出以定位基站為焦點,距離差為長軸的雙曲線,三組雙曲線的交點即為定位標簽位置,如圖7所示。不同于TOF,TDOA通過檢測信號到達2個基站的時間差,而不是通過到達的絕對時間來確定移動臺的位置,因此降低了系統對時間同步的要求。本系統采用TDOA定位算法進行智能無線探桿定位。
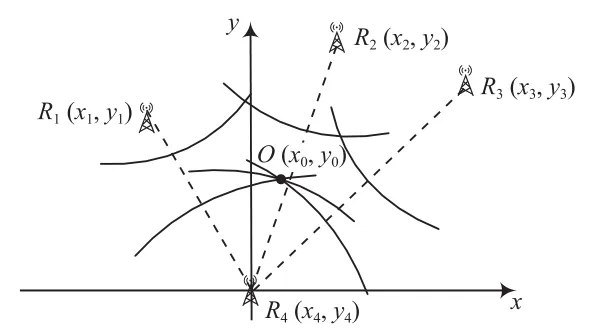
圖7 TDOA算法標簽定位示意圖
如圖7所示,UWB定位基站的坐標分別為R1(x1, y1),R2(x2, y2),R3(x3, y3),R4(x4, y4),基站R1,R2,R3,R4在 安裝部署時位置固定且坐標已知,所求定位標簽的坐標為O(x0, y0)。
假設脈沖信號從定位標簽O到達基站R1、R2、R3、R4的時間為 t1、t2、t3、t4,分別以 (R1、R4),(R2、R4),(R3、R4)作為焦點,定位標簽O發送的信號到兩基站間的距離差為常數,可以得到3組雙曲線,雙曲線的交點即為定位標簽O的坐標。
求解坐標(x0, y0)的方程如下:
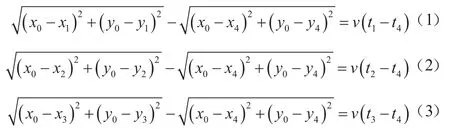
式中,v為脈沖信號的傳播速度。通過上述公式即可求出定位標簽坐標O(x0, y0)的解。
3.4 現場監控主機通信報文
由于現場監控主機數據不僅要上傳至上位機電腦,有些工業現場還需為DCS系統、組態軟件提供數據,所以本系統現場監控主機與上位機通信采用通用的Modbus TCP通信協議。Modbus協議是一項應用層報文傳輸協議,包括ASCII、RTU、TCP三種報文類型,Modbus TCP是由施耐德公司推出的基于以太網TCP/IP的Modbus協議。標準的Modbus協議物理層接口有RS 232、RS 422、RS 485和以太網接口,采用Master/Slave方式通信。上位機的軟件設計在本文中未涉及。現場監控主機數據寄存器區單個無線探桿的通信報文格式見表1所列。
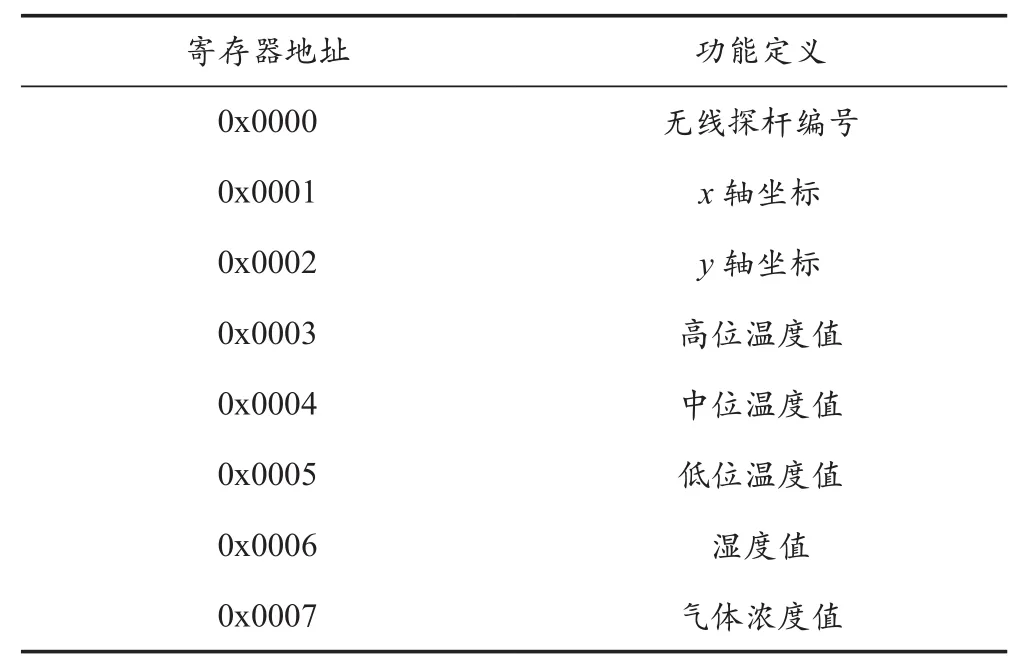
表1 數據寄存器區定義
4 系統運行
系統以封閉煤場中的煤堆作為運行測試對象,煤場內有4個并排布置的條形煤堆,分別標記為1#、2#、3#、4#料堆,將煤場左上角作為定位坐標原點,并將每個煤堆按照實際測量長度劃分為8個相等區域。智能無線探桿的UWB定位標簽接入煤場堆取料機UWB定位基站系統。系統運行結果如圖8所示,8個智能無線探桿通過LoRa無線模塊傳輸的數據正確、穩定,改變任意無線探桿的探測區域位置,UWB定位系統均能精確定位,并在界面中對應區域顯示探桿名稱。
5 結 語
本文結合料堆監測需求,運用UWB室內無線定位技術和LoRa無線傳輸技術設計了一種料堆環境監測系統,該系統實現了靈活改變料堆監測位置、即插即獲取環境數據、可靠無線傳輸和精確坐標定位等環境監測功能。項目運行測試結果表明,系統運行效果良好,可滿足實際料堆監測的需要。
