北斗系統星載原子鐘周期性波動的頻譜分析校正方法*
2021-10-10 04:16:02李驍逸于美婷孫廣富
國防科技大學學報 2021年5期
關鍵詞:系統
李驍逸,龔 航,彭 競,于美婷,孫廣富
(國防科技大學 電子科學學院, 湖南 長沙 410073)
系統時間基準是衛星定位系統實現定位功能的前提。目前北斗衛星導航系統(簡稱北斗三號系統,BDS-3)的系統時間基準由地面站原子鐘通過綜合原子時算法計算生成。一旦地面站出現異常,系統時間基準的生成就會中斷。為了保證系統時間基準的穩定可靠,必須降低對地面站的依賴。
北斗衛星導航系統衛星載有高精度的國產新型銣鐘和被動型氫原子鐘。根據北斗三號系統衛星數目及單個衛星星載原子鐘數目可知,北斗三號系統星載原子鐘總數已經超過100顆。大量的星載原子鐘為北斗三號系統時間基準生成計算擺脫對地依賴提供了可能。將星載原子鐘逐步納入系統時間基準的計算,最終實現完全基于星載原子鐘的系統時間基準生成是衛星定位系統時間基準生成的發展方向。
由于受到太空環境的影響,星載原子鐘進入軌道后的實際性能與地面鐘存在較大差距。目前已有的研究探明了衛星原子鐘性能受到太空環境負面影響的主要表現為鐘差數據中的周期性波動[1-3]。Kenneth等指出星載原子鐘鐘差數據中存在的周期性波動與衛星的軌道周期有一定一致性但又未嚴格符合,同時還與日食周期、測量性能等多種因素相關[4]。對于北斗二號(BDS-2)衛星星載原子鐘鐘差數據的研究表明,不同的原子鐘對工作環境的敏感程度不同,由此導致其鐘差數據受到環境干擾而產生周期性波動時,其周期性波動的周期和幅度都各不相同[5-7]。雖然北斗三號系統的星載原子鐘相比于北斗二號系統已經有了顯著的性能提升,但是鐘差數據中的周期性波動依然存在[8-9]。根據上述已有研究可以確定,不論何種衛星類型或原子鐘類型,其鐘差數據都存在周期性波動。在未能消除周期性波動前不應將星載原子鐘納入系統時間基準的計算,以攜帶周期性波動的衛星鐘差進行系統時間基準計算會將上述波動引入系統時間。對于這一問題,本文提出了一種對鐘差數據中的周期性波動進行校正的方法。該方法不能提升衛星原子鐘的性能,但卻可以提升原子鐘輸出的鐘差數據的性能,從而避免將衛星原子鐘的周期性波動引入系統時間。本文基于國際衛星導航服務組織(International GNSS Service, IGS)對北斗系統衛星由2020年5月1日至5月30日之間連續30 d的鐘差觀測數據計算了北斗系統衛星的幅頻特性、相頻特性及頻率穩定度性能,并提出了消除星載原子鐘鐘差數據中周期性波動的方法。
1 北斗系統星載原子鐘特性分析
1.1 時域特性分析
能夠體現原子鐘時域特性的因素包括相位、頻率和頻率漂移。通常情況下,原子鐘的相位差數據(即鐘差)模型采用包含這三個因素的二次多項式模型。
x(t)=x0+y0t+0.5z0t2+ε(t)
(1)
其中:x0和y0是相位和頻率偏差;z0表示頻率偏差的線性變化,通常稱為老化或頻率漂移;ε(t)是隨機噪聲;t為鐘差數據x(t)的采樣時間序列。
但是星載原子鐘的相位差數據還包含多種周期性波動。星載原子鐘周期性波動項的來源較為復雜,受到地月運行、地球公轉、相對論及溫度光壓和相對論效應等多種因素的影響,在原子鐘相位差數據的常規表達式中需要增加周期項來表達星載原子鐘的周期性波動。因此星載原子鐘的相位差數據被描述為以下等式:
(2)
其中,Al是周期性波動的振幅,ωl是周期性波動的頻率,φl是周期性波動正弦變化的相移。
1.2 頻率穩定度分析
本文首先對衛星鐘差數據進行了預處理,消除了相位跳變、頻率跳變和野值,然后以阿倫偏差來計算各星載原子鐘的頻率穩定度。各衛星進行校正前的原始頻率穩定度如圖1所示。
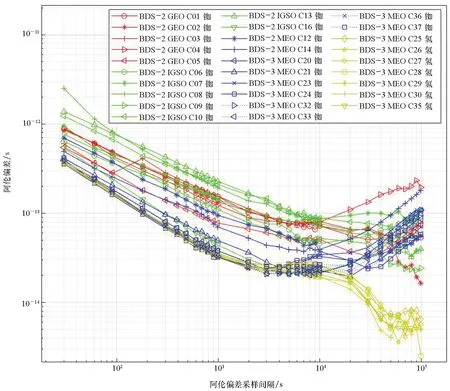
圖1 阿倫偏差計算結果Fig.1 Calculated results of Allan deviation
圖1中橫軸為頻率穩定度采樣間隔,縱軸為頻率穩定度計算結果。其中,紅色曲線為地球同步軌道(GEOstationary, GEO)衛星頻率穩定度,藍色曲線為星載原子鐘為銣鐘的中軌道(MEdium Orbit, MEO)地球衛星頻率穩定度,黃色曲線為星載原子鐘為氫鐘的MEO衛星頻率穩定度,綠色曲線為傾斜地球同步軌道(Inclined GeoSynchronous Orbit, IGSO)衛星頻率穩定度。
頻率穩定度計算表明,衛星軌道類型對星載原子鐘的性能具有顯著影響。在星載原子鐘同為銣鐘的情況下,IGSO衛星的頻率穩定度在萬秒以下穩定度計算步長上比MEO衛星和GEO衛星更差,而在萬秒以上數值則與MEO衛星和GEO衛星相當。GEO衛星的短期穩定度弱于MEO強于IGSO,萬秒以上穩定度與MEO和IGSO相當。MEO衛星在萬秒以下平均時間中具有最好的頻率穩定度性能,但是在萬秒以上平均時間下性能比GEO衛星差。
比較三類衛星的頻率穩定度性能可以發現,北斗三號系統的MEO衛星具有最集中的性能分布。而北斗二號的GEO衛星、IGSO衛星和MEO衛星的性能分布更加松散,且北斗二號的C12、C14號MEO衛星的性能相比于GEO衛星和IGSO衛星優勢并不顯著。這一結果表明,即使同為銣鐘,北斗三號系統的銣鐘性能也優于北斗二號系統的銣鐘。
頻率穩定度計算結果也表明,星載原子鐘的類型對星載原子鐘的性能也具有顯著影響。除去搭載銣鐘的衛星,北斗三號系統還擁有部分星載鐘為氫鐘的MEO衛星。這一類衛星不僅萬秒以下穩定度和銣鐘衛星中短期穩定度性能最好的北斗三號銣鐘MEO衛星相當,在萬秒及更長的平均時間中更是表現出了所有衛星中最好的性能。
計算結果顯示MEO衛星上的氫鐘比銣鐘在萬秒及更長采樣間隔下的頻率穩定度性能上具有極大的性能優勢。計算結果同時顯示,在同為銣鐘的情況下,IGSO衛星和GEO衛星在天及更長的采樣間隔上的頻率穩定度性能優于MEO衛星,這表明IGSO衛星軌道和GEO衛星軌道比MEO更有利于保持原子鐘的長期頻率穩定度性能。因此,將IGSO衛星和GEO衛星上的銣鐘也更換為氫鐘是值得嘗試的,IGSO衛星和GEO衛星上的氫原子鐘極有可能獲得比MEO衛星氫鐘更好的長期頻率穩定度性能。
由于MEO衛星星載被動型氫鐘的性能在各個平均時間下的頻率穩定度都具有最佳性能。在星座自主守時的設計中,應當以使用被動型氫鐘的MEO衛星作為綜合原子時計算的參考鐘或時間基準物理信號的生成鐘。同時根據系統的設計指標,靈活運用IGSO衛星、GEO衛星和載有銣鐘的MEO衛星,根據具體需求決定這三類衛星在聯合守時中的權重。
1.3 頻域特性分析
本文在去除鐘差數據的二次趨勢項之后,對獲得的鐘差殘差數據進行快速傅里葉變換獲得衛星鐘差的周期特性。由于篇幅限制,本文在所有衛星中選擇了13顆衛星,使例證包含了全部衛星類型和星載原子鐘類型。本文選擇GEO衛星C02(銣鐘)、C05(銣鐘),IGSO衛星C07(銣鐘)、C13(銣鐘),北斗二號系統的MEO衛星C11(銣鐘)、C12(銣鐘)以及北斗三號系統的MEO衛星C23(銣鐘)、C36(銣鐘)、C25(氫鐘)、C29(氫鐘)為例。衛星鐘差幅頻曲線如圖2、圖3所示。
從圖2和圖3可以看出,北斗二號系統及北斗三號系統所有類型的各衛星均有不同程度的24 h、12 h、8 h、6 h等多種周期項。比較北斗二號系統各衛星與北斗三號系統各衛星可以發現,北斗二號系統各衛星星載原子鐘更容易受到多重外部因素的影響且自身噪聲更大,導致周期性波動項不僅更多,且在幅頻曲線中難以顯著地體現出來。北斗三號系統各衛星原子鐘自身噪聲較小導致其周期性波動項相對北斗二號系統格外顯著,同時其周期性波動項數量更少,表明對環境因素也具有更好的耐受性。由于北斗系統的授時精度在20 ns左右[10],為了滿足衛星定位系統的精度需求,在進行周期性波動項校正時,不能僅僅計算少數幾個主要周期項,而應以周期性波動幅度為考慮因素。本文將幅頻曲線中所有幅值大于0.01 ns的周期項全部作為校正目標。

(a) GEO C02 銣鐘(a) GEO C02 Rb (b) GEO C05 銣鐘(b) GEO C05 Rb (c) IGSO C07 銣鐘(c) IGSO C07 Rb

(a) MEO C23 銣鐘(a) MEO C23 Rb (b) MEO C36 銣鐘(b) MEO C36 Rb
2 北斗三號系統星載原子鐘周期性波動校正
2.1 周期性波動校正時域模型
本文基于式(2)所示星載原子鐘鐘差模型公式,構建如式(3)所示的星載原子鐘相位差數據校正模型。
(3)
其中:x′(t)為經過校正后的鐘差數據;Al為求得的各周期性波動項幅值;ω′為求得的各周期性波動項頻率;φ′l為求得的各周期性波動正弦變化的相移。
具體方法為,在式(2)所示的星載原子鐘鐘差數據時域模型上添加周期項,使新添加的周期項與星載原子鐘固有的周期項頻率幅度相同而相位相反,從而將衛星鐘差固有的周期性波動抵消。通過傅里葉變換求得精確的A′l、ω′l、φ′l數值,即可通過式(3)消除星載原子鐘鐘差數據內的周期性波動項,同時無須考慮該周期性波動的成因和來源。
2.2 校正后鐘差數據頻率穩定度分析
圖4和圖5分別為校正前后的北斗二號系統和北斗三號系統衛星星載原子鐘鐘差數據頻率穩定度計算結果對比。
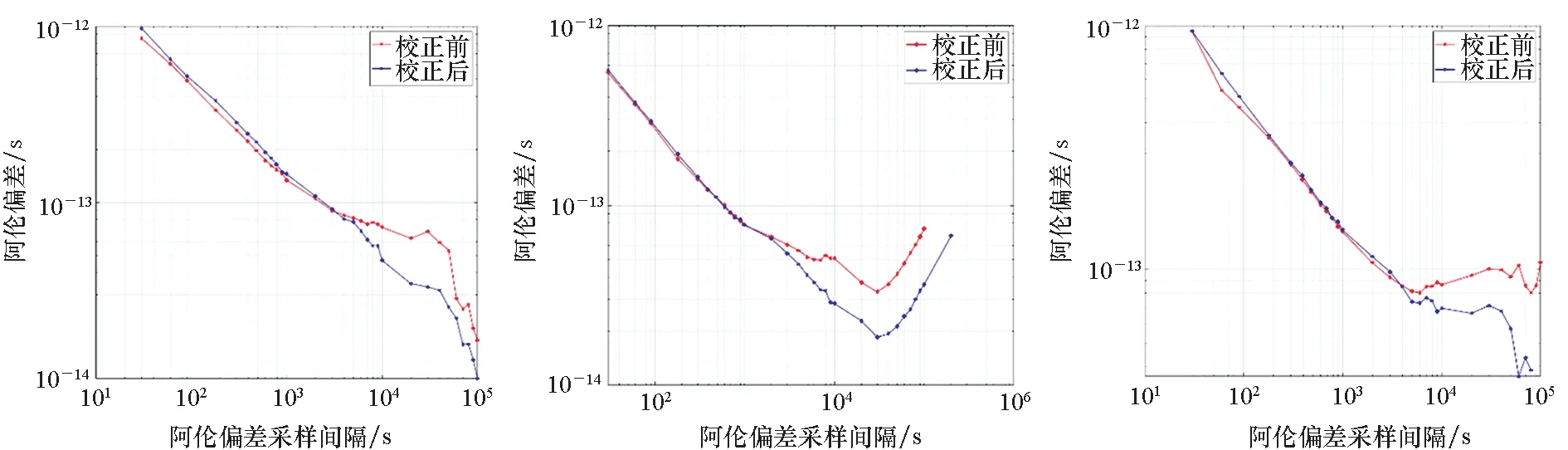
(a) GEO C02 銣鐘(a) GEO C02 Rb (b) GEO C05 銣鐘(b) GEO C05 Rb (c) IGSO C07 銣鐘(c) IGSO C07 Rb
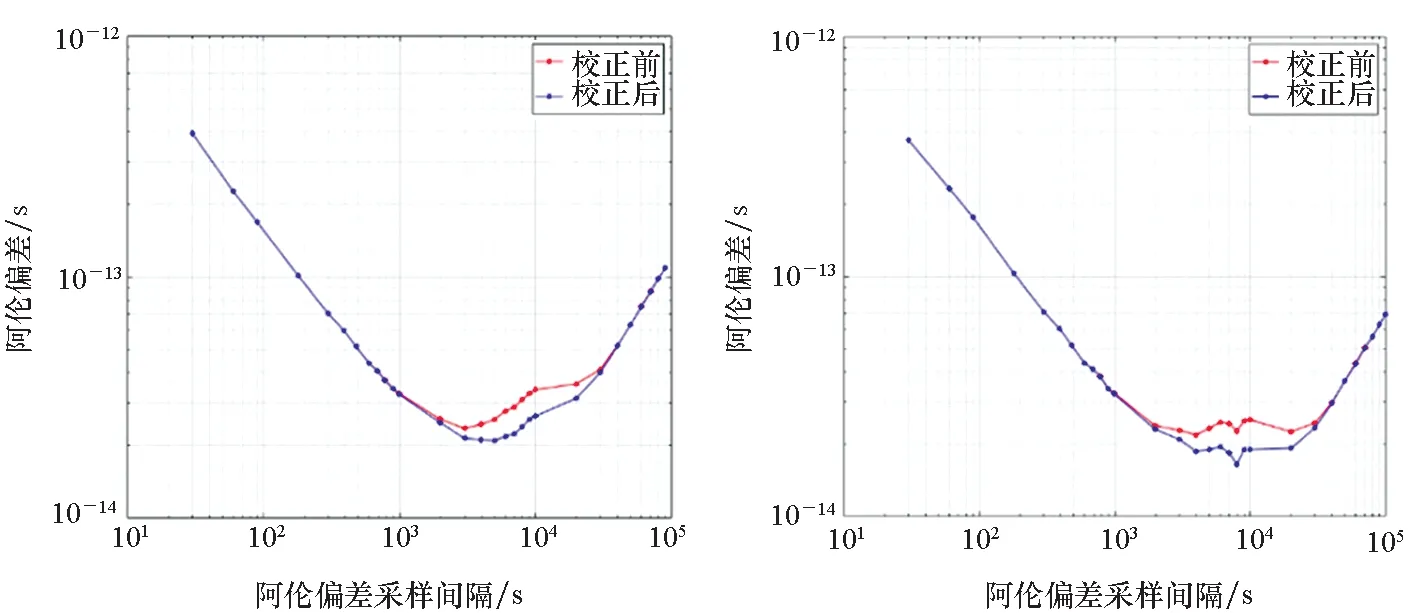
(a) MEO C23 銣鐘(a) MEO C23 Rb (b) MEO C36 銣鐘(b) MEO C36 Rb
由圖4和圖5可以看出,所有的衛星都產生了顯著的性能提升效果。從衛星軌道類型上來看,GEO衛星的性能提升效果最佳,其次是IGSO衛星,MEO衛星的提升效果在三種衛星中最弱。從原子鐘類型上來看,北斗二號系統銣鐘的性能提升效果最佳,其次是北斗三號系統的銣鐘,北斗三號系統的氫鐘性能提升最弱。但是不論是何種軌道類型、何種原子鐘類型的衛星,校正后的穩定度曲線都正確地削去了原穩定度曲線的異常隆起,校正后的穩定度曲線有較大改善。
穩定度數據的具體提升數值如表1所示。

表1 星載原子鐘性能提升效果
由表1可以看出,所有衛星的頻率穩定度性能都獲得了顯著的提升,萬秒頻率穩定度提升范圍在14%~45%不等。其中,C02衛星的提升效果最為顯著,萬秒頻率穩定度由7.2×10-14s提升到4.6×10-14s,在10萬秒頻率穩定度已達到1.0×10-14s,與地面站銫原子鐘相當。其余各衛星在萬秒穩定度及最佳穩定度步長下的穩定度性能也都達到了地面站銫原子鐘的性能(萬秒頻率穩定度7×10-14s,5071A型銫原子鐘),差于地面站氫鐘(萬秒頻率穩定度2×10-15s,MHM-2010型氫原子鐘)。
3 結論
通過比較校正前后星載原子鐘鐘差數據的頻率穩定度性能差異,本文所述方法能夠成功消除由衛星運行環境引起的衛星鐘差數據周期性波動,提高星載原子鐘鐘差數據的計算性能。通過該方法校正后,系統中不同軌道類型的衛星星載原子鐘的性能都得到了顯著的提升。其中,GEO C05衛星星載原子鐘的萬秒頻率穩定度提升45%,MEO C29衛星星載原子鐘的萬秒頻率穩定度提升30%,IGSO C07衛星星載原子鐘的萬秒頻率穩定度提升20%。通過本文所述方法的校正,北斗二號和北斗三號星載原子鐘普遍達到了地面站銫鐘的頻率穩定度性能,為北斗系統基于星載原子鐘的星座自主守時提供了支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
