基于CCD 成像的便攜式光學遠程清障系統設計
2021-10-10 03:56:14呂艷霞張首軍吳志群賈豐榕趙子明
電子設計工程 2021年19期
呂艷霞,張首軍,吳志群,賈豐榕,趙子明
(國網黑龍江省電力有限公司鶴崗供電公司,黑龍江鶴崗 154101)
對于高處、深處、危險等人為無法清障的位置,常常積累很多障礙物。例如電網放入金屬絲通過桿塔被置于空中,風、風箏線、塑膠片、廣告布等漂浮的異物很容易吹落到裸露金屬線上,容易造成短路現象[1]。以往光學清障是利用激光傳感器輻照燃燒異物,并將雜質蒸發掉,從而與待清障物體分離,實現遠程清除,從而簡化了工作流程,提高了工作人員的安全性[2]。但是,目前的光學障礙清除方法很難掌握激光傳感器的光束輻照時間長度,也很容易導致激光傳感器和燃燒梁的異物輻照,而光束和激光傳感器將繼續照射,不僅造成浪費,甚至造成網面熔化[3]。采用低功率密度的激光清障技術,可實現補光、照明等功能;采用中等功率密度的激光清障技術,可通過其熱效應等作用,加速冰層融化和膠體凝固;采用高功率密度的激光清障技術,可使被照射物體燃燒、碳化、熔化,從而達到清障的目的。但是現在市場上的清障設備功能單一,攜帶不便,無法滿足使用要求。針對現有技術的不足,設計出了一種便攜式CCD 成像光學遠距離清障系統,可快速設定CCD 傳感器的發射功率和發散角度,攜帶方便。
1 系統硬件結構設計
基于CCD 成像技術,設計了一種便攜式遠距離清障系統[4-6]。內裝重箱小車上設有電池盒,電池裝在蓄電池盒內,重箱小車的前接觸頭設置有平/斜/平/斜,通過平移/傾斜翻蓋上端連接的CCD 傳感器發射器[7]。CCD 傳感器發射裝置具有一外殼,該外殼內裝有CCD 傳感器,傳感器的前端連接光學瞄準器[8]。
光學瞄準器包括靜態瞄準器和動態瞄準器,利用CCD 傳感雷達收集外來物體數據,并對其進行實時圖像處理,使工作人員能夠觀察物體在CCD 傳感光線下燃燒或蒸發的程度,從而確定CCD 傳感物體的照射時間。圖1 為系統硬件結構。
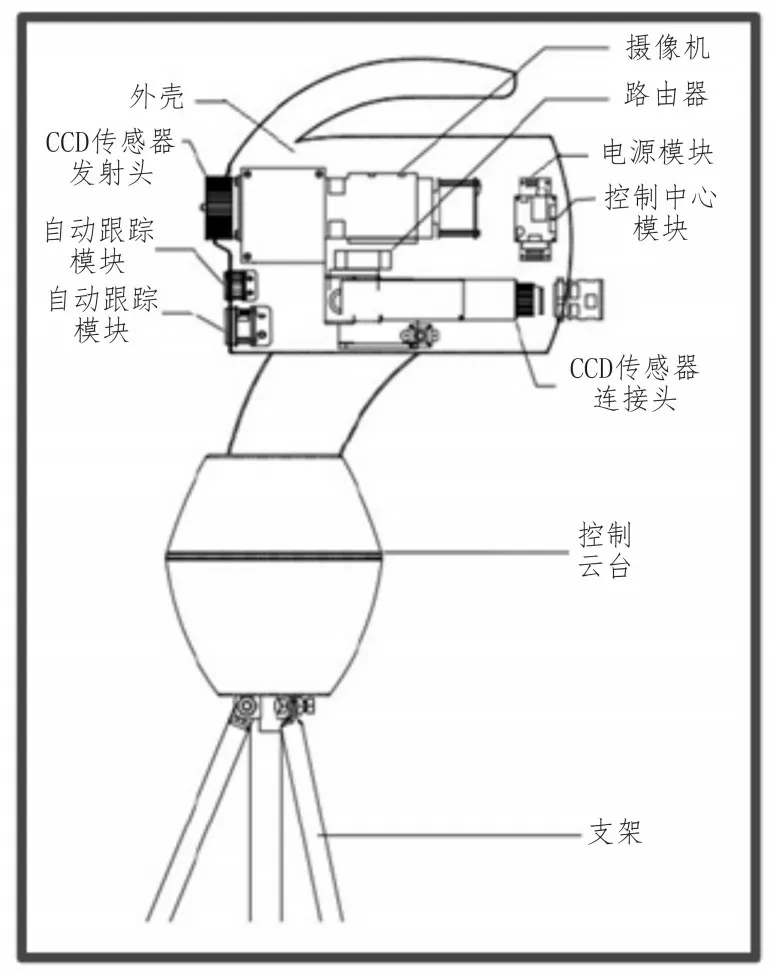
圖1 系統硬件結構
如圖1 所示,控制中心模塊通過通信模塊與智能設備通信,智能設備控制和連接攝像機[9]。在CCD傳感器清洗系統的同時,攝像機將目標圖像傳送給智能裝置,建立包含目標的視野,在自動跟蹤模塊收集到數據信息的外來對象后,通過控制中心模塊,實現對外來對象的自動跟蹤、自動清理功能,達到協同控制[10]。
1.1 CCD傳感器
CCD 傳感器是一種半導體器件,能夠將光學圖像轉換為信號形式,模擬電荷為載體,可得到真實圖像[11-12]。利用信號放大和模數轉換技術,將光信號轉換成數字信號,便于存儲和處理。該傳感器具有體積小、功耗低、抗沖擊振動、性能穩定、響應速度快等特點。圖2 為CCD 設備結構,包括輸入、傳輸和輸出3 個部分。
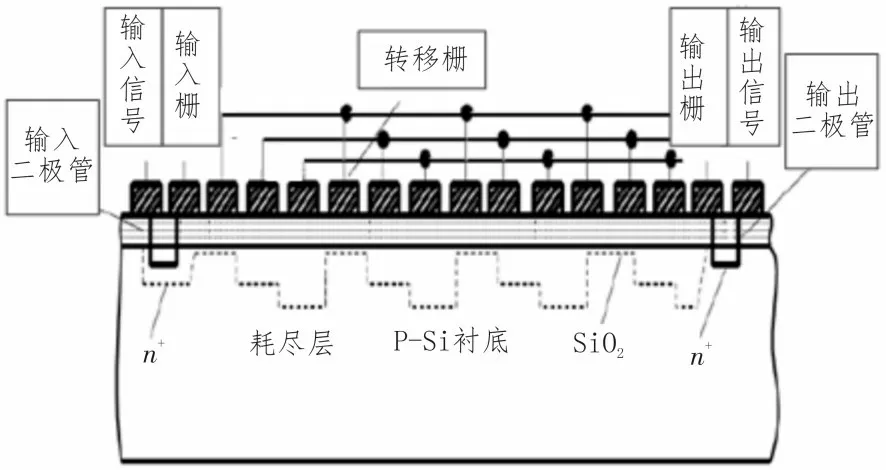
圖2 CCD傳感器結構
由圖2 可知,與以電流或電壓為信號的其他設備不同,CCD 以電荷為信號,其基本功能就是儲存和傳輸光或電刺激產生的信號電荷[13-14]。在固定時間內加載脈沖信號,能夠通過CCD 定向傳輸,為電荷產生、儲存、傳輸提供幫助[15]。
1.2 光譜采集子系統
利用CCD 測量物質吸收光譜的基本思想,是根據散射器件波長,在CCD 有效像素上分散單色光。隨著CCD 有效像素增加,色散器件色散能力增強,頻譜采集系統分辨率提高[16-19]。第一個光源使用了色散器(通常是光柵和其他單色裝置),根據不同波長色散位置分散入射單色光。圖3 為TCD1208AP 光譜采集子系統。
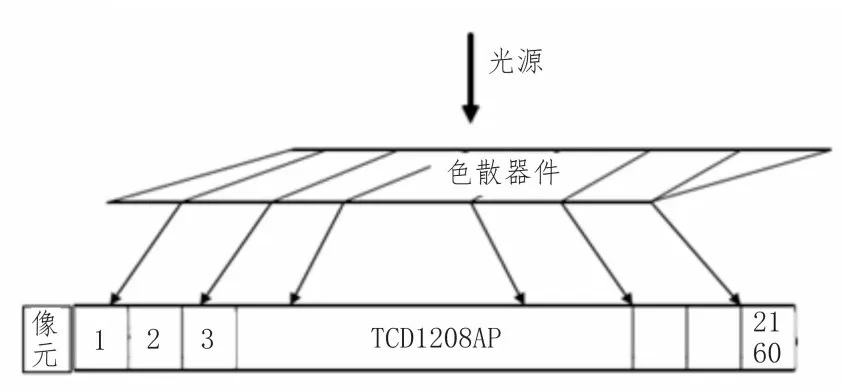
圖3 TCD1208AP光譜采集子系統
1.3 LED驅動電路設計
發光二極管驅動電路的主要作用是提供對內窺鏡操作的照明,因為內窺鏡沒有光源,所以無法獲取真實圖像。為此,設置內窺鏡,保證接口上光源成為內窺鏡設計的必要照明條件。使用發光二極管,可將電流轉換為光能,采用大功率輸出方式,可滿足光源需求。圖4 為LED 驅動電路。
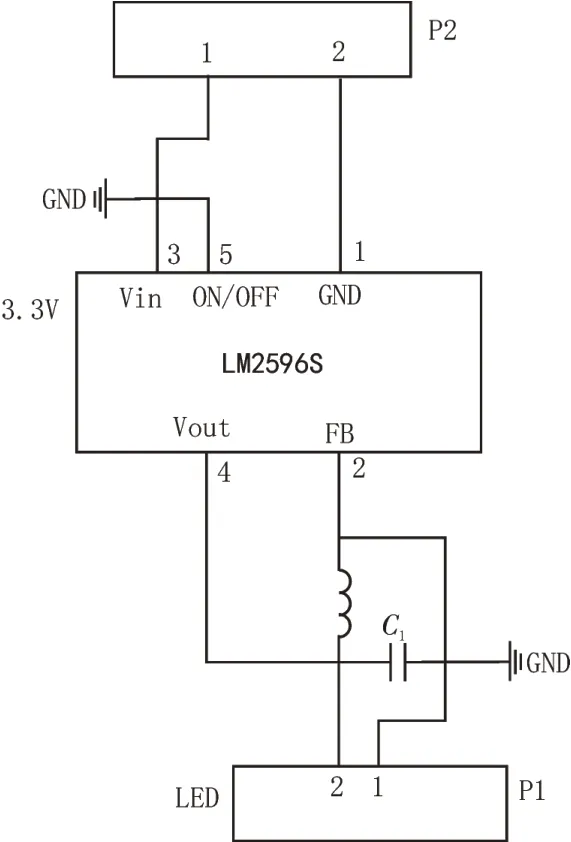
圖4 LED驅動電路
因為高功率LED 在工作時會釋放出大量的熱量,LED 需要焊接在鋁基板上,而鋁基板需要通過導熱潤滑脂與熱傳導器連接來實現導熱。發光二極管驅動電路的主要元件為LM2596S 開關穩壓器,可穩定輸出3 A 驅動電流,線性度好,負載調節特性好。
2 系統軟件部分設計
2.1 基于CCD成像電荷分析
攝像機內部由三晶片CCD 捕捉,相機內沒有使用彩色濾鏡,通過分光棱鏡的光信號可以得到紅、綠、藍3 種光。由3 個相同的光束采集的紅、綠、藍3 種光,分別被反射兩次,這種收集方法屬于完全收集和無損接收。就清晰度和色彩重現而言,它遠超單片成像系統,圖5 為三晶片CCD 成像原理圖。
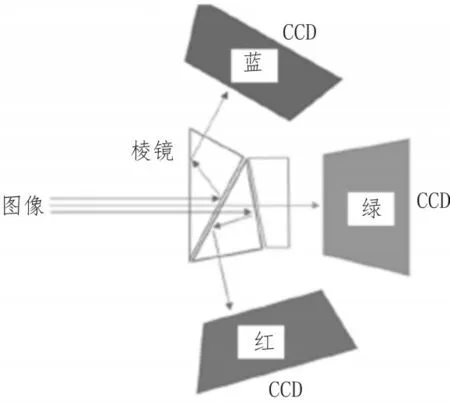
圖5 三晶片CCD成像原理
每盤選擇1/3 英寸的單色CCD,體積小,適用于便攜設備。攝像機電路借助DSP 信號處理芯片,其由3 個單色CCD 連接,通過這3 個單色運算,能夠得到彩色輸出圖像。
輸入部分主要負責將光/電注入信號電荷存儲到CCD 轉移柵中,電荷注入計算公式如式(1)所示:

式(1)中,η表示量子效率;q表示電荷量;Neo表示光子流速;S表示光敏受光面積;tc表示光注入時間。通過改變這些參量,可以將注入的信號依次轉移。
2.2 CCD驅動脈沖產生流程
圖6 為線陣CCD 驅動脈沖產生流程。
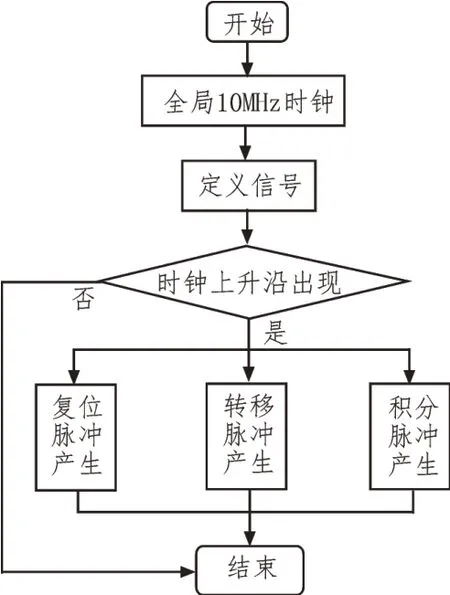
圖6 線陣CCD驅動脈沖產生流程
由圖6 可知,由CPLD 產生l0 MHz 時鐘,根據其產生的脈沖信號,設定寄存器作用域。重新設置1 MHz 脈沖頻率,即使CCD 受到整控脈沖頻率影響,但傳送門脈沖頻率也不低于0.5 MHz。線陣CCD的每一個輸出像素時間為1 μs,其輸出頻率與驅動脈沖輸出頻率始終一致,都是450 Hz。
2.3 清障流程設計
依據上述內容,設置清障流程,如下所示:
step1:使用時先將LHW-3A 便攜式CCD 傳感器清洗裝置放在適當位置,打開設備盒,取出CCD 傳感器清洗裝置;
step2:上鎖前自鎖輪,打開電池盒,檢查電池電量等參數,保持工作狀態,確保沒有問題;
step3:將云臺側臥垂直狀態從水平位置移至垂直位置,并固定4 個扣子,連接5HDM 數據電纜的遙控器CCD 傳感器清潔儀表,與CCD 傳感器連接;
step4:打開自動調焦裝置,打開急停開關,提示CCD 傳感器工作指示燈亮(能聽到冷卻風扇的聲音);
step5:遠程控制CCD 感應器,開機或關機時,清潔器顯示能力隨屏幕閃爍,左有紅綠燈,右有信息欄,選擇適當的速度,運行云臺接近目標方向,觀察遙控,調整目標顯示;
step6:如果顯示對象不太明顯,利用CCD 傳感器變焦調整按鈕可對焦距調整,確定兩點為CCD 傳感器的切削起點,并作為預置位置;
step7:CCD 感應器的切削速度取決于目標材料,對CCD 傳感器的切割,可隨意切換CCD 傳感器的切割方式;
step8:遇有緊急情況,按緊急停止開關。在消除危險之后,打開緊急停止開關繼續工作,直到障礙物被清除。
3 實 驗
在Altium Designer summer09PCB 版圖下,對基于CCD 成像的便攜式光學遠程清障系統設計的合理性,進行實驗驗證分析。
3.1 實驗環境
清障儀向地面發射激光燒斷樹枝,傳輸室的運營和維護部門為國家電網襄陽供電公司,其利用無人駕駛飛機三維建模實現了數字樹障自動檢測,發現在110 千伏順桃線#016-017 線下大約有300 棵樹障,如圖7 所示。

圖7 樹枝障礙
離線地形復雜,為提高清障效率,操作者利用激光清障裝置遠程清除工作人員難以觸及的障礙物。
3.2 實驗結果與分析
分別使用低功率密度激光清障技術、中等功率密度激光清障技術、高等功率密度激光清障技術和基于CCD 成像清障技術,對清障效果對比分析,結果如圖8 所示。
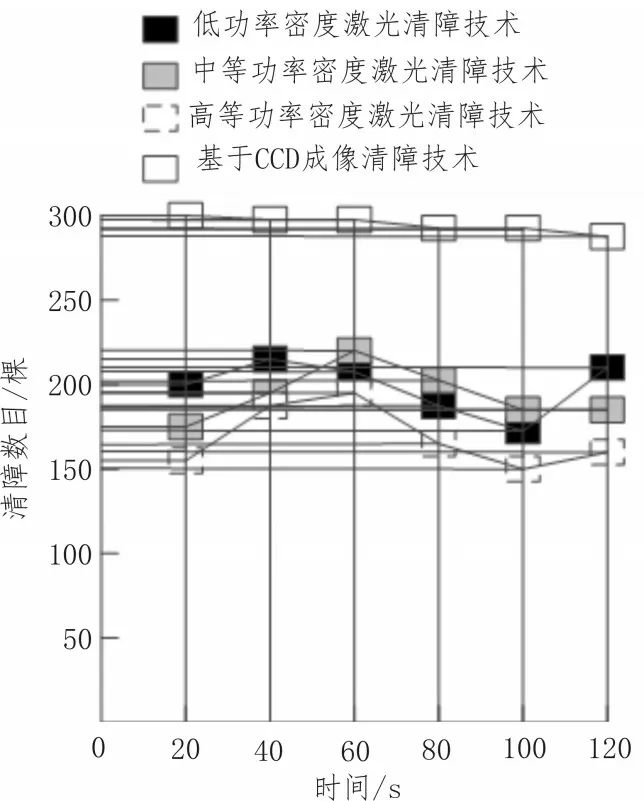
圖8 不同技術清障效果對比分析
由圖8 可知,使用低功率密度激光清障技術、中等功率密度激光清障技術、高等功率密度激光清障技術隨著時間增加,清障數目不同,但都無法達到300 棵故障電線都被清除的預期效果。而使用基于CCD 成像清障技術可達到300 棵樹障都被清除的預期目的,由此可知,使用該系統具有良好的清障效果。
4 結束語
該文設計的基于CCD 成像的便攜式光學遠程清障系統,可對光波段光譜分析,并保證光信號順利注入轉移柵中。由實驗結果可知,所設計的系統具有高效清障效果。
受時間和條件的限制,對光譜采集系統的設計原則僅作了初步探討,取得的效果與實際應用尚有一定差距。為使便攜式清障系統在實際中得到應用,認為有以下幾個方面需要改進:
1)通過使用現在流行的光纖探針,將單色光引入光譜系統,設計了一套完整的光譜曲線測量系統。
2)微處理器具有可定制的操作系統,這個系列處理器屬于ARMCortex-M3 系列,它是一個單片機和嵌入式處理器,無需PC 上的軟件就可以實現更為精確的光譜曲線繪制。
3)采用16 比特、24 比特等高轉換比特的模數轉換設備,可提高光譜數據轉換精度,減少數據量化誤差。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25