變電站巡檢機(jī)器人航向信息融合算法研究
2021-10-11 06:48:12張蒙,高嵩,李琛
山東電力技術(shù) 2021年9期
張 蒙,高 嵩,李 琛
(1.國網(wǎng)山東省電力公司電力科學(xué)研究院,山東 濟(jì)南 250003;2.國網(wǎng)山東省電力公司禹城市供電公司,山東 禹城 251200)
0 引言
傳統(tǒng)的變電站主要依靠值班員進(jìn)行人工巡檢,存在意外風(fēng)險發(fā)生頻次高、巡視效率低等缺點(diǎn)[1-2]。隨著自動化、物聯(lián)網(wǎng)和人工智能等技術(shù)的迅速發(fā)展,使用機(jī)器代替人工,進(jìn)行電力設(shè)備巡檢已經(jīng)成為數(shù)字化變電站的重要趨勢[3-5]。其中,實(shí)時定位系統(tǒng)為巡檢機(jī)器人的運(yùn)動控制系統(tǒng)提供連續(xù)、實(shí)時、精確的位置、航向等導(dǎo)航信息,使其沿預(yù)定的路徑行駛并完成檢測任務(wù)[6-7],是其實(shí)現(xiàn)高壓設(shè)備智能巡檢的關(guān)鍵技術(shù)之一[8]。
在變電站環(huán)境中,巡檢機(jī)器人近似在二維平面中運(yùn)動[9]。因此,相對于俯仰角和橫滾角,對航向角的輸出精度和輸出頻率有更高的要求。全球定位系統(tǒng)(Global Positioning System,GPS)可以為用戶提供全球范圍內(nèi)的實(shí)時位置和速度信息[10]。GPS 定位基于衛(wèi)星測距原理,沒有累積誤差,其長期性能優(yōu)異[11]。但是,在變電站多遮擋和復(fù)雜電磁環(huán)境下,衛(wèi)星信號容易受到干擾,使得定位性能下降甚至失效。另外,GPS 輸出的航向角信息是根據(jù)載體的速度方向推算的,靜止?fàn)顟B(tài)下航向角無輸出。基于GPS 存在隨機(jī)噪聲、易受到干擾、只能動態(tài)輸出航向等特性,單依靠GPS 傳感器,無法滿足巡檢機(jī)器人對航向輸出的精度、穩(wěn)定性和連續(xù)性要求。光纖陀螺儀是一種可提供高精度高頻率角速度輸出的慣性器件[12]。通過對角速率進(jìn)行積分可獲得航向變化信息。陀螺儀的航向輸出幾乎不受外部干擾,具有良好的平滑度、較高的更新頻率和短時精度[13]。由于通過積分獲得航向變化,陀螺儀只能輸出相對的航向信息,而且誤差會隨著時間的推移而累積,并且趨向于無窮大。GPS 和陀螺儀傳感器單獨(dú)使用時,優(yōu)缺點(diǎn)鮮明;將兩者恰當(dāng)融合時,卻具有良好的互補(bǔ)性。短時間內(nèi),陀螺儀的輸出具有較高高精度和高連續(xù)性,可以校正GPS 的隨機(jī)噪聲,并在信號丟失期間提供航向保持[14]。GPS 作為一種全局定位技術(shù),其提供的航向誤差是有邊界的,可以糾正陀螺儀的累積誤差,改善其長期輸出性能。
通過引入一種基于航向誤差的自適應(yīng)離散卡爾曼濾波器,融合GPS ∕陀螺儀傳感器輸出并獲得航向信息。試驗(yàn)結(jié)果表明,該融合算法在動態(tài)和靜態(tài)條件下都能獲得高精度、高穩(wěn)定性、高刷新率的實(shí)時航向輸出,為巡檢機(jī)器人的高精度路徑規(guī)劃和運(yùn)動控制提供可靠的傳感信息。
1 傳感器輸出及數(shù)據(jù)處理
1.1 GPS接收機(jī)
采用NovAtel 公司的ProPak-G2 GPS 接收機(jī),其內(nèi)置的OEMV-2板塊能夠捕獲L1∕L2雙頻GPS信號,而且支持差分修正。兩個雙向的COM 端口,最高可支持230 400 bit∕s 串口通信速率。初始化完成后,能以最大20 Hz 的更新頻率輸出定位信息。該接收機(jī)的實(shí)體和具體接口如圖1所示。
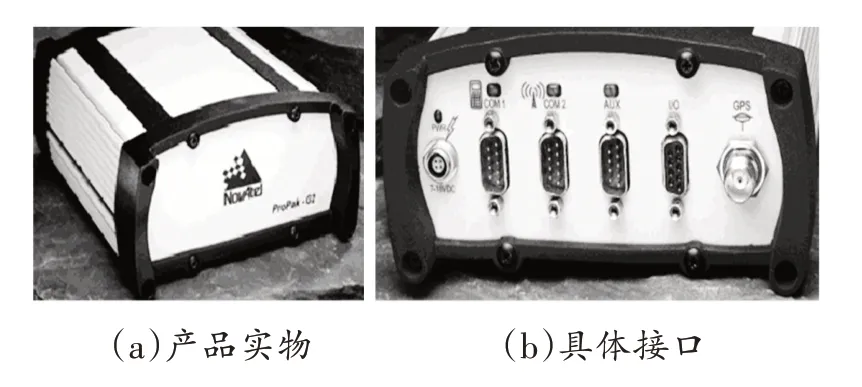
圖1 NovAtel GPS接收機(jī)
ProPak-G2接收機(jī)有多種輸出模式,可以通過串口向接收機(jī)發(fā)送不同的指令來完成不同的輸出。本文采用它的BESTXYZA 的輸出格式。該格式可以輸出Wgs84 地心坐標(biāo)系下載體的實(shí)時三維位置信息、載體的三維速度信息和位置精度因子的信息。圖2展示了BESTXYZA格式下一幀典型的輸出數(shù)據(jù)。

圖2 1幀完整的BESTXYZA格式數(shù)據(jù)
在該模式下,GPS接收機(jī)可以輸出載體的三維多普勒速度信息,即圖2 中字母DOPPLER_VELOCITY后面的連續(xù)3 幀數(shù)據(jù),其分別表示W(wǎng)GS84 地心坐標(biāo)系下三維速度分量。
變電站機(jī)器人在地面近似二維平面運(yùn)動,為便于計算,一般地,將GPS 接收機(jī)獲得的地心坐標(biāo)系WGS84 下的位置和速度信息轉(zhuǎn)換到東北天ENU 坐標(biāo)系中,航向信息可以通過速度分量進(jìn)行反推[15]。公式為:航向=arctan(Vy∕Vx)。其中,Vy、Vx分別為由WGS84 坐標(biāo)轉(zhuǎn)換到ENU 坐標(biāo)后,載體沿著Y軸(北向)、X軸(東向)的速度分量。
1.2 陀螺儀
陀螺儀能夠測量車體的實(shí)時角速度。采用KVH公司生產(chǎn)的DSP3000 陀螺儀,如圖3 所示。該陀螺儀采用成熟的光纖電路和全數(shù)字信號處理系統(tǒng),能夠有效消除零偏不穩(wěn)定性和震動噪聲。實(shí)際工程測試中,將KVH DSP3000 水平安裝在機(jī)器人系統(tǒng)上,同時打開電源,在靜止?fàn)顟B(tài)下,經(jīng)過標(biāo)定修正后每小時的零漂累積誤差可控制在5°以內(nèi)。

圖3 DSP 3000陀螺儀
DSP3000 可以提供角度輸出模式,直接為載體提供相對航向信息。上電后,陀螺默認(rèn)輸出的是角速率信息。只要持續(xù)向串口發(fā)送‘P’指令,即可切換到角度輸出模式。陀螺儀的輸出可選100 Hz或高達(dá)1 000 Hz,高更新頻率保證精確捕捉短時間內(nèi)的航向變化信息。
2 離散卡爾曼濾波器
卡爾曼濾波器是一種線性濾波器,它通過一系列遞推數(shù)學(xué)公式描述,給出一種高效可靠的狀態(tài)估計方法,而且使估計均方差最小。卡爾曼濾波器及其衍生算法在多傳感信息融合中有著廣泛的應(yīng)用[16]。記系統(tǒng)的狀態(tài)變量x∈?n,?n即n維的線性空間,其時間更新過程可以用離散差分方程表示,即:

同時定義觀測變量z∈?m。?m表示m維的線性空間。系統(tǒng)的量測方程可寫為

式中:wk、vk分別為過程噪聲和觀測噪聲;A,B,H表示轉(zhuǎn)移矩陣;uk-1代表k-1時刻的系統(tǒng)輸入。一般地,過程噪聲wk和觀測噪聲vk是相互獨(dú)立,并且服從正態(tài)分布的高斯白噪聲,即:

式中:Q和R分別是過程噪聲和觀測噪聲的協(xié)方差矩陣。
卡爾曼濾波器通過反饋控制的方法來估計過程狀態(tài)。具體來說,可以分為時間更新和量測更新兩部分。時間更新方程通過前一時刻的系統(tǒng)狀態(tài)和誤差協(xié)方差,利用狀態(tài)更新方程推算當(dāng)前時刻的系統(tǒng)狀態(tài)和誤差協(xié)方差,完成對當(dāng)前時刻狀態(tài)的先驗(yàn)估計。量測更新則將先驗(yàn)估計與當(dāng)前時刻的量測值結(jié)合,得到改進(jìn)的后驗(yàn)估計。經(jīng)過量測反饋校正得到的后驗(yàn)估計又會被用來推算下一時刻的先驗(yàn)估計,從而實(shí)現(xiàn)卡爾曼濾波器的反饋遞歸估計過程。
具體應(yīng)用中,卡爾曼濾波一般由初始化、時間更新和量測更新3部分組成,估計過程如圖4所示。其中表示k時刻狀態(tài)變量估計的協(xié)方差矩陣,Kk表示k時刻的濾波器增益。x0、P0分別表示狀態(tài)變量的初始估計值和初始估計協(xié)方差矩陣。

圖4 卡爾曼濾波流程
要使用卡爾曼濾波器,首先建立估計變量的狀態(tài)方程和量測方程。只有對系統(tǒng)狀態(tài)建模準(zhǔn)確,并對過程噪聲協(xié)方差和測量噪聲協(xié)方差進(jìn)行正確的估計,濾波器才能準(zhǔn)確估計狀態(tài)變量,消除累積誤差和隨機(jī)噪聲。
3 航向融合算法
GPS 接收機(jī)獲得的航向估計只能在動態(tài)情況下使用,存在隨機(jī)噪聲且易受外界環(huán)境干擾。陀螺儀提供的相對航向信息輸出穩(wěn)定,短時間內(nèi)精度很高,但存在累積誤差,且在全局定位時需要初始化。通過建立恰當(dāng)?shù)碾x散卡爾曼濾波器,融合兩系統(tǒng)的航向輸出,使巡檢機(jī)器人在動態(tài)和靜態(tài)情況下都能獲得精度高、穩(wěn)定性好的航向輸出。
3.1 濾波器建模
陀螺儀的航向輸出可以看成由真實(shí)的航向和航向誤差組成。采用間接卡爾曼濾波進(jìn)行數(shù)據(jù)融合,將航向輸出的系統(tǒng)誤差作為估計量,通過估計系統(tǒng)誤差間接獲得對航向的融合估計。設(shè)GPS 和陀螺儀得到的航向信息分別為θgps和θgyro,則有:

式中:θ為真實(shí)航向;δθ為航向誤差。將陀螺儀的航向誤差作為系統(tǒng)估計變量,其航向誤差主要由漂移累積誤差和隨機(jī)噪聲兩部分組成,離散化的系統(tǒng)狀態(tài)方程可表示為

式中:δθk和δθk-1分別為k時刻和k-1 時刻航向誤差的估計;δdrift為k-1 時刻到k時刻陀螺的累積誤差;δnoise為k時刻的隨機(jī)噪聲。
由式(5)和式(6)可得系統(tǒng)的量測方程為

式中:v為量測噪聲,即GPS輸出航向的白噪聲。
3.2 融合算法
建立估計系統(tǒng)誤差的離散化濾波器模型后,可以按照卡爾曼濾波的一般過程,融合輸出實(shí)時航向信息。
3.2.1 初始化
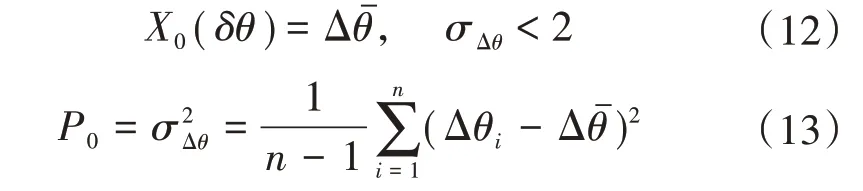
初始化即確定卡爾曼濾波狀態(tài)變量和狀態(tài)協(xié)方差的初始估計,為濾波遞推過程提供初始值。根據(jù)濾波器建模,本文的初始化變量為陀螺儀輸出的相對航向與Wgs84東北天坐標(biāo)系下絕對航向的誤差X0(δθ),其初始協(xié)方差矩陣P0。由于X0(δθ)和P0初始化后均為1×1階矩陣,記為X0(δθ)和P0。
系統(tǒng)的真實(shí)航向?yàn)闄C(jī)器人相對于ENU東北天坐標(biāo)系下的指北絕對航向。慣性器件獲得航向的原理是依靠角速率積分,故只能獲得航向的變化信息,即相對航向。要獲得指北航向,只能依靠全球定位系統(tǒng)GPS的信號輸出。
GPS 輸出的實(shí)際上是位置信息,航向推算依靠的是位置變化帶來的速度方向。當(dāng)載體處在靜止?fàn)顟B(tài)時,速度信息為0,只有在運(yùn)動的情況下,才能通過GPS得到航向信息。
為盡可能保證初始航向的精確性,需要載體以一定速度運(yùn)動,并且該段時間內(nèi)GPS 信號良好。本文通過連續(xù)幀的自適應(yīng)算法,實(shí)時估計GPS 航向信息的可靠性,確保航向誤差的初始化的準(zhǔn)確性,具體的算法如下。
航向?yàn)V波器初始化過程中,實(shí)時連續(xù)采集20 幀陀螺儀和GPS 得到的航向信息并儲存在序列中,分別記為:

式(9)和式(10)相減,得到一組航向差值的量測序列為

求取公式(11)中差值序列的均值和方差,作為濾波器的狀態(tài)變量和誤差協(xié)方差的初值。初始化過程中,實(shí)時存儲連續(xù)n幀(本初始化算法中,取n=20)航向差值序列ΔΘ,并求取序列的均方差σΔθ。當(dāng)方差小于一定閾值(2°),說明GPS 的航向估計已經(jīng)較為精確,系統(tǒng)初始化完畢。將滿足閾值條件的航向差值序列平均值作為濾波狀態(tài)變量的初值,并將序列的方差作為誤差協(xié)方差的初值,即:
求取式(11)中差值序列的均值和方差,作為濾波器的狀態(tài)變量和誤差協(xié)方差的初值。初始化算法的流程如圖5所示。

圖5 濾波器初始化算法
為保證初始化算法的準(zhǔn)確性,必須保證同步采集到GPS 和陀螺儀的每幀數(shù)據(jù)進(jìn)行比對。在實(shí)際的工程實(shí)踐中,由于GPS 和陀螺儀的數(shù)據(jù)更新頻率存在差異,“同步采集”只能是一種離散化的近似。
由于GPS 的數(shù)據(jù)更新頻率一般較低(采用的Novtel Propak-G2 GPS接收機(jī),最大輸出頻率20 Hz),基于慣性器件的陀螺儀更新頻率較高(采用的KVH DSP3000 陀螺儀可選100 Hz 或1 000 Hz 輸出)。可以近似地認(rèn)為:GPS 的輸出是相對離散的,而陀螺儀的輸出是近似連續(xù)的。數(shù)據(jù)同步過程將以GPS 輸出為基準(zhǔn),采用多線程同步采集GPS 和陀螺儀的輸出信號,每獲得一幀GPS 數(shù)據(jù),便抓取附近時刻的陀螺儀輸出,作為近似的同步數(shù)據(jù),以此類推,獲得一組連續(xù)的數(shù)據(jù)比對幀。
實(shí)際上,本算法取航向差序列的幀數(shù)n=20,與GPS 接收機(jī)的最大輸出頻率20 Hz是一致的,即實(shí)際連續(xù)取得1 s內(nèi)的GPS和陀螺儀近似同步序列。
3.2.2 濾波參數(shù)及濾波過程
因?yàn)椴捎靡痪S估計,濾波器的系統(tǒng)方程和量測方程的轉(zhuǎn)移矩陣為1×1的單位矩陣,即

系統(tǒng)的預(yù)測誤差主要由累積誤差和隨機(jī)噪聲構(gòu)成。相比累積誤差,實(shí)時的隨機(jī)噪聲是小量,可以略去。航跡推算系統(tǒng)的航向信息來自光纖陀螺的相對航向輸出,累積誤差δdrift以近似線性方式增長。經(jīng)過靜態(tài)試驗(yàn)標(biāo)定后,陀螺每小時的零漂在7.2°,過程噪聲協(xié)方差1×1矩陣Qk可以按式(3)和圖4所示流程推導(dǎo),即為

式中:dtk為陀螺儀更新的時間間隔。如果選取100 Hz的角度更新輸出模式,時間間隔dtk=0.01 s。
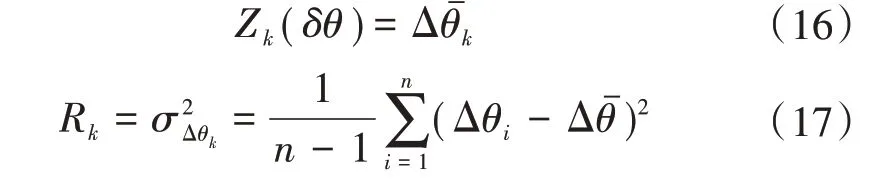
為達(dá)到更好的濾波效果,采用統(tǒng)計的方法,較為精確的估計量測噪聲。量測噪聲的估計方法與濾波器初始化時所用方法類似。同時采集連續(xù)20 幀的航跡推算系統(tǒng)和GPS 測量得到的航向序列并做差,得到航向差序列,求取均值和均方差。短時間內(nèi),陀螺的零漂誤差可以忽略不計,航相差序列的均方差可以近似作為系統(tǒng)的量測噪聲,序列的均值則作為量測變量,即
濾波器估計的是航跡推算系統(tǒng)的航向誤差,航向誤差主要是由光纖陀螺零漂造成的累積誤差。相比GPS 航向測量的噪聲,短時間內(nèi)陀螺的累積誤差很小;而且,GPS 對航向的測量受車速和GPS 接收信號的影響,測量精度并不穩(wěn)定。因此在濾波時,沒必要對每幀數(shù)據(jù)都進(jìn)行量測更新。設(shè)定閾值為5°,只有當(dāng)航相差序列標(biāo)準(zhǔn)差σΔθk<5°時,才進(jìn)行量測更新,校正系統(tǒng)變量和狀態(tài)協(xié)方差矩陣。否則,只進(jìn)行一步預(yù)測過程,維持航向誤差不變,同時向前推算系統(tǒng)誤差協(xié)方差。實(shí)時濾波流程如圖6 所示。圖中,Δθfilter表示經(jīng)過卡爾曼濾波器融合后輸出的航向角誤差數(shù)據(jù),θf表示最終輸出的融合航向角信息。

圖6 實(shí)時濾波過程
4 試驗(yàn)結(jié)果分析
采用該融合算法進(jìn)行實(shí)際測試。融合算法軟件基于linux C++平臺開發(fā),分為數(shù)據(jù)解析、數(shù)據(jù)處理和數(shù)據(jù)發(fā)送三個模塊。數(shù)據(jù)解析模塊主要負(fù)責(zé)讀取來自GPS、陀螺儀的數(shù)據(jù)包信息。數(shù)據(jù)處理模塊則負(fù)責(zé)融合處理來自各個傳感器的測量數(shù)據(jù),數(shù)據(jù)發(fā)送模塊負(fù)責(zé)將經(jīng)過融合濾波處理的航向數(shù)據(jù)打包發(fā)送到機(jī)器人導(dǎo)航控制模塊。因?yàn)橐瑫r處理來自不同傳感器的數(shù)據(jù),為保證系統(tǒng)的實(shí)時性,滿足多傳感器和多任務(wù)的要求,結(jié)算軟件采用多線程方式設(shè)計,利用linux 平臺的并發(fā)性,采用多線程同時解析和處理多傳感器的信息并進(jìn)行數(shù)據(jù)融合。
在戶外模擬變電站復(fù)雜環(huán)境進(jìn)行實(shí)際運(yùn)行試驗(yàn),機(jī)器人最高運(yùn)行速度控制在5 m∕s 以內(nèi)。在濾波器初始化完畢后,得到單純依靠GPS 測得航向和數(shù)據(jù)融合得到的航向結(jié)果如圖7所示。
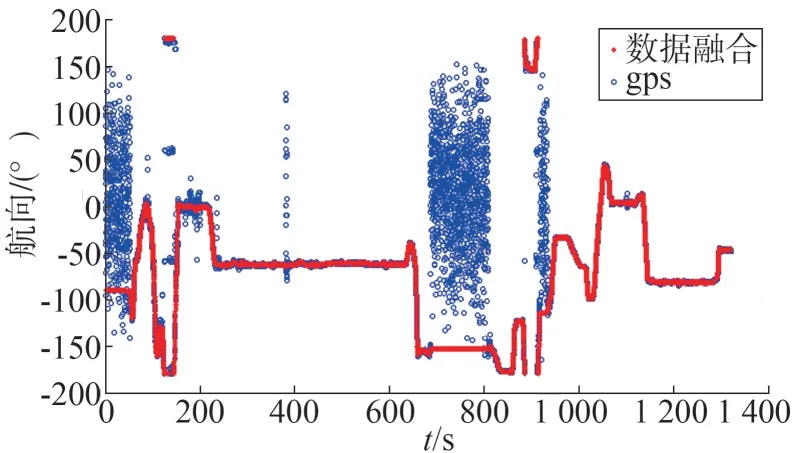
圖7 航向?qū)Ρ?/p>
為了更全面的分析融合算法獲得航向的效果,分別選取機(jī)器人從靜止到啟動、GPS信號較差和GPS信號較好3 種情況,對比融合航向輸出和GPS 航向輸出,結(jié)果如圖8—圖10所示。

圖8 從靜止到啟動狀態(tài)下航向輸出對比

圖9 GPS信號差情況下航向輸出對比
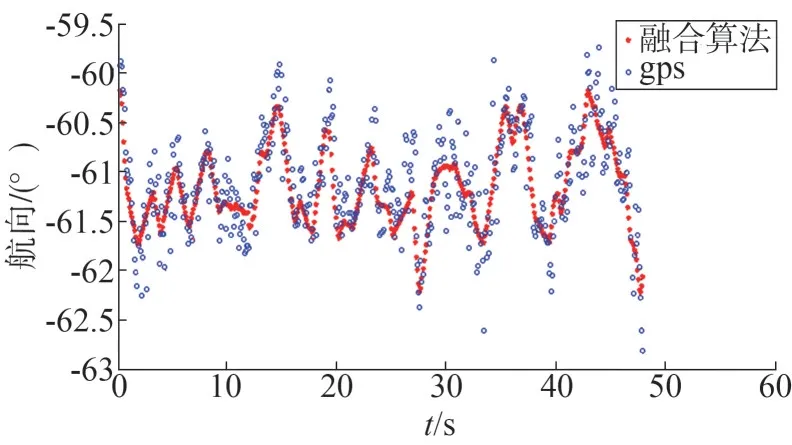
圖10 從靜止到啟動狀態(tài)下航向輸出對比
由圖8 結(jié)果可知,在靜止?fàn)顟B(tài)下,單純靠GPS 無法獲得航向信息。然而,濾波算法融合GPS 和航跡推算的航向輸出,即使在靜止?fàn)顟B(tài)下也可以對車體的航向信息進(jìn)行保持。車啟動后,濾波算法得到的航向信息與GPS 測得的航向能夠很好吻合,說明靜態(tài)下航向保持的效果很好。
由圖9 結(jié)果可知,在GPS 信號受到干擾情況下,依靠GPS獲得的航向信息有很大的誤差。依靠融合算法,可以有效消除抑制GPS的誤差,即使在GPS性能很差的情況下,融合航向仍能保持較高的輸出精度。
由圖10 結(jié)果可知,在GPS 信號較好的情況下,能夠輸出較高精度的航向信息,但是仍存在隨機(jī)噪聲。通過融合算法得到的航向信息相對連續(xù),能夠有效消除隨機(jī)噪聲的干擾。
5 結(jié)語
提出了一種基于卡爾曼濾波的地面巡檢機(jī)器人實(shí)時航向估計融合算法。通過GPS 信號修正陀螺儀的累積誤差;同時,通過陀螺儀的穩(wěn)定輸出消除GPS輸出的隨機(jī)噪聲和信號不穩(wěn)定性。試驗(yàn)結(jié)果表明,該融合算法可以提高輸出航向的準(zhǔn)確性,魯棒性,并在GPS丟失或靜止?fàn)顟B(tài)下保持高精度的航向輸出。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
中外會展(2014年4期)2014-11-27 07:46:46
電子設(shè)計工程(2014年6期)2014-02-27 11:56:54