三維激光掃描技術在露天礦山監測中的應用
2021-10-12 08:24:34魏占勝王濤鮑文福
采礦技術 2021年5期
魏占勝,王濤,鮑文福
(新疆紫金鋅業有限公司,新疆 烏恰縣 845450)
0 引言
在露天礦山中,采場的測量與驗收工作往往需要測量人員通過人工、手持的方法進行數據采集,此項工作屬于靜態測量,不僅工作量較大、誤差較大,而且存在一定的安全風險。傳統上多采用傳感器監測法,但該方式只能反映出幾個單點的變形情況,不能直觀地給出監測點間、面內、體內的變形。
三維激光掃描技術系統又稱“實景復制技術”,是測繪領域繼GPS技術之后的又一次技術革命[1],測量人員可以在較安全的區域完成動態的數據采集工作,無需反射棱鏡,對掃描目標物體不需進行任何表面處理,快速、可靠地采集物體表面的三維數據。相對于傳統的單點測量,三維激光掃描技術實現了面測量的技術突破,且其具有便攜、采集速度快、非接觸式、自動化程度高等特點,可用于解決危險目標、環境(或柔性目標)及人員難以企及的情況,因而近年來廣泛應用于地形地質測繪、礦山測繪、礦山三維模型重構等領域。
1 Maptek R3系列三維激光掃描系統
1.1 系統組成
南澳Maptek公司的R3系列三維激光掃描系統包含三維激光掃描儀、三腳架、井下光源、溜井測量裝置及相關軟件,如 Point Studio,Sentry、PerfectDig等,并配套影像數據采集系統、空間數據測量系統、巖土工程分析系統、邊坡變形監測系統等。
其中,三維激光掃描儀由激光頭、內置羅盤、內置GPS、內置鋰電池、高清相機、光學望遠鏡、單把手、旋轉軸、雙把手所構成如圖 1所示。PointStudio軟件是用于處理掃描儀的建模、分析和報告等大型點云數據的3D平臺桌面工具,具備體積計算、自動提取坡頂底線、等高線自動提取、剖面線提供、填挖方量計算、巖土工程分析等功能。Sentry軟件專門用于針對邊坡變形的監測軟件,具備自動處理采集的點云數據、繪制變形位移曲線、繪制變形速度曲線、繪制氣象信息曲線的功能。PerfectDig軟件專門用于施工結果與設計方案的對比檢驗與快速質量評估。

圖1 三維激光掃描儀
1.2 系統工作原理
掃描儀采用脈沖式激光、運用激光測距原理進行工作[2],如圖2所示,由激光發射器(圖2中原點)發出激光脈沖信號,經目標區域(P點)的表面漫反射后,沿相同的路徑反射傳回到接收器,便可直接返回P點至原點的距離S,再通過控制編碼器同步測取P點的橫向掃描角度觀測值α和縱向掃描角度觀測值β,基于以上數據,利用式(1)~式(3)即可計算P點的相對坐標xp、yp和zp,利用反射原理可得到P點的反射率。
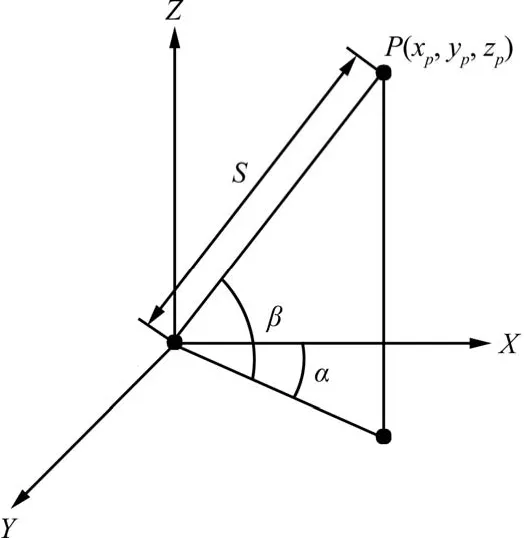
圖2 三維激光掃描儀工作原理
1.3 系統優勢
與其他測量系統相比較,Maptek R3系列三維激光掃描系統具有準確高效性、獨立性、強固性、可調節性、兼容性、數圖同步性以及主動性的優勢。
(1)準確高效性。本系統可以大范圍、高分辨率、高精度地采集目標物體的坐標。不同于傳統激光掃描儀的標靶拼接,可通過后視定向技術進行點位快速匹配,并能以1200萬點/min的點速率進行掃描,這大大縮短了外業工作時間,簡化了內業數據處理工作流程。
(2)獨立性。本系統體積小、重量輕、便于攜帶;其自身可完成三維點云-面-體的全過程;系統的點密度極高,同時PointStudio軟件也具備自動拼接、后臺交會功能,因而設備無須全站儀全程配合。
(3)強固性。本系統結構緊湊,符合IP65防護等級,即可完全防止粉塵進入,不受任何角度低壓噴射的影響,可適應-40~+50℃的溫度。
(4)可調節性。適應三腳架、延伸桿、車載、機載多種環境的測量;且可在獲取點云數據的同時直接瀏覽測量結果,外業中可任意定義掃描區域及點云密度。
(5)兼容性。本系統PointStudio等處理軟件的數據成果可與 Surpac等第三方礦業軟件無縫對接;掃描儀上配備全站儀棱鏡或RTK接口[4],可與傳統儀器進行坐標數據的快速轉換。
(6)數圖同步性。本系統內置工業級線性數碼相機,像素達到1.47億,影像數據與點云數據同步采集,幫助測量人員在現場進行綜合判斷、在內業時編錄礦巖邊界和節理裂隙。
(7)主動性。本系統采用主動發射掃描激光的方式進行工作,掃描過程不受掃描環境的時間、空間約束。
4月26日,天成控股發布2016年度報告,因連續兩年經審計的凈利潤虧損,天成控股實施股票退市風險警示,股票被交易所特別處理,戴上“ST”的帽子,停牌一天,此后,日最高漲跌幅變更為±5%。
2 工程應用實例
2.1 工程背景
隨著國家和礦山企業對礦山安全的日益重視,越來越多的礦山向數字化的方向發展[5],數字化逐步滲透到礦山的每個部分與每個環節中。為順應礦山的數字化大趨勢,某金屬礦山露天開采中要完成采場的測量、采掘方量的結算與驗收、邊坡的穩定性分析、排土場及尾礦庫的位移沉降監測,并建立以上各區域的數字化模型。以上技術目標可為礦山的開采方案、維修計劃、事故預防措施的制定提供參考。
2.2 準備工作
在開始現場掃描之前,需要進行測前準備。將采場通訊基站的網絡引入Maptek R3系列三維激光掃描系統(以下簡稱“掃描系統”)所在的位置,連接掃描系統的各個通訊接口,連接掃描系統的控制系統與操作軟件。在目標區域布設控制點,在測量位置布設測站,采用控制測量的方式連接各測站及其數據,相鄰測站間要保留適當的重疊部分。在某測站采用架站式架設掃描儀并進行定向,由于掃描儀自身具備固定的坐標系統,因此,只需對1~2個標靶進行精確掃描,再通過操作軟件控制掃描儀的內置羅盤與 GPS進行坐標定位,即可完成定向工作。
2.3 露天監測應用
2.3.1 采掘方量的結算與驗收測量
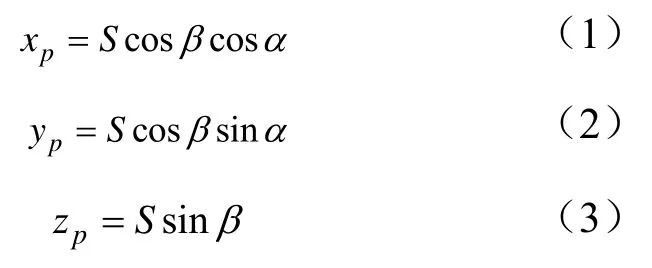
在各測站對露天采場進行三維激光掃描,通過遙測系統將掃描結果傳輸至處理中心。在處理中心利用 PointStudio軟件讀取全部數據,選擇拼接方法,對各測站的數據進行配準,得到絕對坐標下的點云數據,PointStudio軟件內置多種拼接方法,可確保配準具有較高的準確率。然后,使用軟件的范圍過濾和抽稀功能,對不同測站數據的重疊區域進行過濾[6]。對采集的點云數據通過掃描三角網進行建模,生成露天采場三維模型,圖 3(a)、(b)分別為10月份、12月份的露天采場模型。最后,對比兩期數據模型,得到兩期測量間發生變化的區域,如圖3(c)所示;運用PointStudio軟件的體積計算功能,計算兩期間的采掘方量。
圖3 露天采場三維模型
2.3.2 地形測量
利用掃描系統獲取1:500的比例尺下地形的有效點云數據,與實際地形進行對比,如圖4所示,可以看出,點云數據可較準確地描述地形特征。

圖4 露天采場的地形點云數據與實際地形的對比
2.3.3 采場邊坡的巖土工程分析
利用掃描系統獲取采場邊坡的點云數據[7](如圖 5(a)所示),計算目標區域的反射率和紋理信息,再運用巖土工程分析系統對采場邊坡所揭露出的節理構造進行統計分析,找出弱勢結構面,如圖5(b)所示。
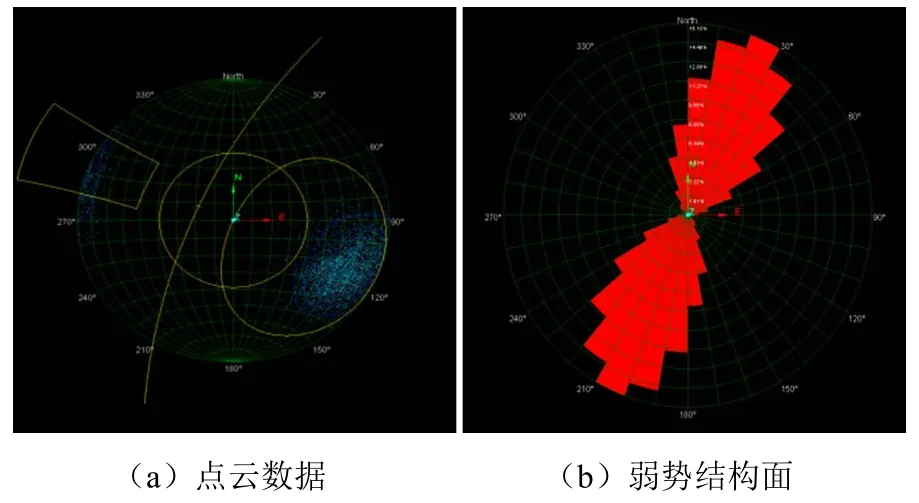
圖5 目標區域的節理構造分析
2.3.4 排土場的邊坡穩定性監測預警
坡腳是排土場的根基,其長時間支撐著整個排土場,是確保排土場穩定的前提條件和重要因素,此外,本露天礦排土場的坡腳正逐漸地被雨水沖刷和侵蝕,已形成半個深溝,因此,排土場的全天候監測預警區域最終選擇在腰部與坡腳之間的制高點,監測水平為 1370~1670 m,監測角度為水平120°~垂直90°,監測區域如圖6所示。
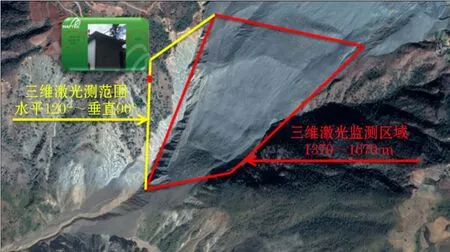
圖6 排土場的邊坡穩定性監測預警區域
在監測站點埋設固定監測墩,定期將掃描儀安裝在監測墩上,盡量在單次內進行較長時間的持續掃描,并在掃描系統至礦山中控室間布設無線基站與電力網絡,通過無線基站連接掃描系統與Sentry軟件。之后,在Sentry軟件中定義多個全天候穩定性監測預警初目標區域。然后,根據掃描儀定期采集的數據,軟件會自動繪制變形位移及速度曲線,生成三維變形位移云圖[7],分別如圖 7(a)、圖 7(b)所示。

圖7 排土場的邊坡穩定性監測結果
若計劃監測時間的天氣條件較為惡劣,須提前為掃描儀修建2 m×2 m×2 m的觀測房用以代替監測墩。房內附有長2 m,高1 m,下沿高于地面1 m的前窗,調整掃描儀的位置以使激光頭正對前窗,在房內安裝避雷針、等電位連接排、接地裝置,形成防雷系統;并在房頂設置氣象站,可直觀地獲悉現場的氣象信息。
2.3.5 排土場的邊坡治理施工監測
連接掃描系統與 PerfectDig軟件,通過PerfectDig軟件控制掃描儀即時采集施工現場的場景三維數據,軟件自動對其進行拼接、植被剔除等;然后,圈定待評估區域,并將現場數據與設計方案進行對比、查詢和分析,其中包括橫截面、塊體輪廓線截取、施工與設計偏差、超挖量、欠挖量(如圖 8所示)、挖方偏差范圍尺寸等的查詢;之后,PerfectDig軟件自動生成施工與設計一致性檢驗的成果報告,根據報告內容,對施工結果不斷進行修正調整,從而控制與設計之間的偏差。
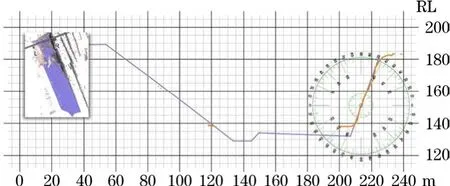
圖8 超挖量、欠挖量分析
3 結論
(1)三維激光掃描技術適用于測量人員無法到達的復雜礦山現場和空間,能夠用可視化的方式表示目標區域的具體形態和空間分布,具有準確高效性、獨立性、強固性、可調節性、兼容性、數圖同步性及主動性的優勢。
(2)將三維激光掃描技術同時應用于礦山中,可實現對地上、地下構筑物的全方位監測與管理,還可根據點云數據再現礦山開采過程,輔助測量人員實時掌握各區域的開采進度、開采程度以及變形情況,提高了礦山技術管理水平,為礦山測量的驗收提供數據基礎,為礦山的安全生產提供了保障。為邊坡穩定性的分析、現場的治理提供了依據,促進了礦山安全監測的精細化管理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45