農業機械導航路徑規劃研究進展
2021-10-13 07:15:14何永強
農業機械學報 2021年9期
周 俊 何永強
(南京農業大學工學院, 南京 210031)
0 引言
20世紀80年代中期以來,傳感器與測控技術、通信技術和智能控制技術等先進科學技術的應用,特別是GNSS技術在農業領域的推廣應用,共同推動了現代農業生產過程向智能化、信息化、規模化和精細化的方向快速發展[1-2]。歐美、日本等發達國家的現代農業起步較早,現已逐步形成了較為科學、系統的現代農業技術體系。我國農業生產智能化技術起步相對稍晚,但隨著全社會生產力的不斷提高、勞動力持續向非農業生產門類轉移,現階段也逐漸出現將先進的科學技術成果結合農業應用場景轉化為現代農業生產智能化技術,并衍生出一系列適用于我國農業發展的新模式。
農業機械自動導航技術是智能農業裝備基礎技術之一,主要包括農田環境和農機位姿信息獲取、導航路徑規劃和導航控制等。其中,導航路徑規劃是實現農機導航跟蹤控制的基礎,通常以作業成本(如總作業距離、作業時間、能耗等)最低為目標,在預作業區域內為自動導航提供一條較優的無障礙作業路徑,合理的導航路徑規劃可以減少總作業路徑[3]、降低多余覆蓋率[4]、提升農機的作業效率[5-6]。農業機械導航路徑規劃是智慧農業實施過程中一項重要的基礎支撐技術,在復雜多變的農業環境條件下,不僅可為農機提供精準的導向信息,還有助于提高農機作業質量。而且,結合農藝要求和農業機械性能生成的導航路徑可顯著提升農業生產方式標準化和規范化,促進智慧農業的高效生產。
本文從全局路徑規劃和局部路徑規劃兩個角度對國內外導航路徑規劃技術闡述分析,綜述農業機械導航路徑規劃研究進展,并指出導航路徑規劃技術未來的研究重點,以期為農業機械智能化發展提供參考。
1 全局路徑規劃研究進展
全局路徑規劃是在作業區域環境信息已知的前提下,基于先驗完全信息的路徑規劃方法[7],環境信息包括作業區域和障礙物的位置、形狀和大小。根據作業場景的不同,全局路徑規劃可分為全局覆蓋路徑規劃和全局點到點路徑規劃兩種類型,均是以提高作業質量、降低作業成本為規劃目標,尋求較優的作業路徑。
1.1 全局覆蓋路徑規劃
1.1.1規則邊界地塊全覆蓋路徑規劃
規則邊界地塊全覆蓋路徑規劃通常有兩種方法:①基于基準線平移的方法,利用平行于地塊邊線(一般是較長的一邊)的基準線按作業幅寬等間距平移生成多條直線作業路徑直至覆蓋整個地塊,再根據實際作業情況選擇合適的地頭轉彎策略,此方法只需預先測量生成基準線的兩點坐標,計算過程簡單,但地頭轉彎處需利用傳感器進行地頭檢測或人工輔助轉彎。②采用局部坐標系法,預先測量地塊的4個頂點坐標,按照預定作業方式和地頭轉彎方式計算所有導航路徑特征點,再根據作業順序生成遍歷整個地塊的完整作業路徑,此方法計算過程相對復雜,但生成的導航路徑比較完整,作業過程中無需人工干預,常用的全覆蓋路徑規劃策略如圖1所示[8-9]。

圖1 全覆蓋路徑規劃策略Fig.1 Full coverage path planning strategy
美國伊利諾伊大學RYERSON等[10]將地塊柵格化后,利用遺傳算法規劃覆蓋面積最大、總作業長度最短的導航路徑。日本的NAGASAKA等[11]通過車載RTK-GPS測量矩形田塊4個頂點坐標,利用梭行法進行無人駕駛插秧機作業路徑規劃。BOCHTIS等[12]綜合考慮作業區域幾何形狀、作業幅寬和最小轉彎半徑等因素,通過算法自動規劃較優的全覆蓋路徑,非作業距離可減少50%。CONESA-MUOZ等[13]提出了一種混合選擇算子用于提高啟發式算法的收斂速度,并融合模擬退火算法進行多作業車輛全覆蓋路徑規劃,作業時如有車輛發生故障,可實時調整全局作業路線,由其余車輛完成剩余任務。
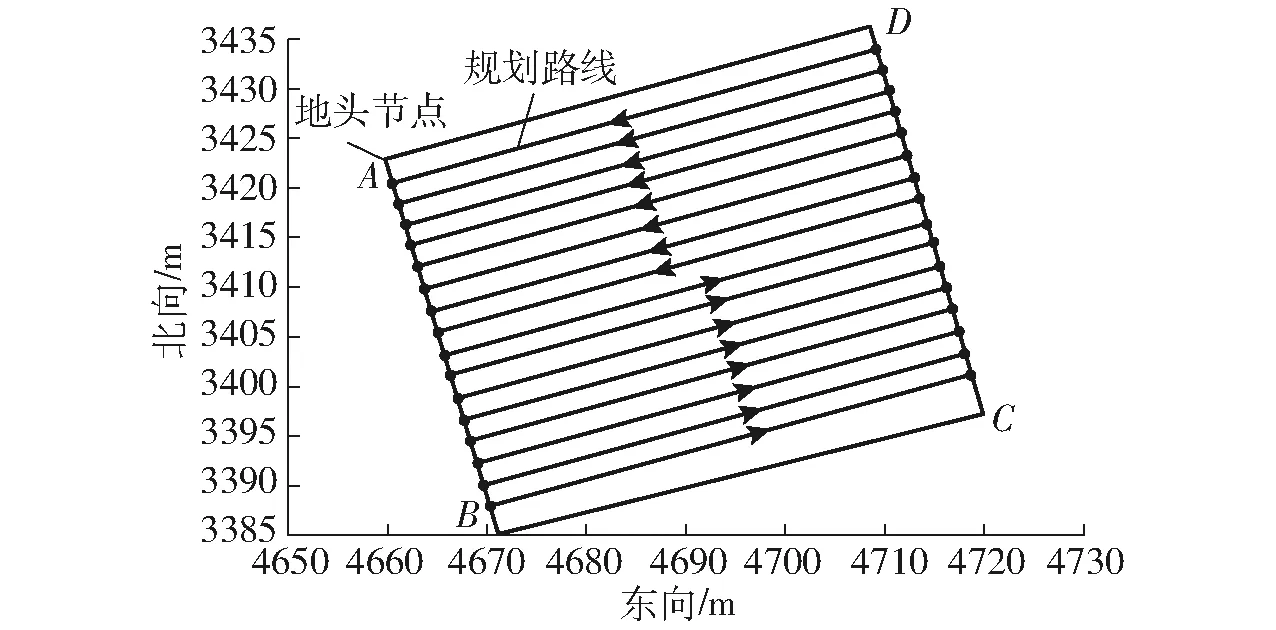
圖2 規則邊界地塊全覆蓋路徑規劃[14]Fig.2 Full coverage path planning of regular field
國內,羅錫文等[14]利用RTK-DGPS采集地塊四頂點坐標,根據作業行最大距離和地塊形狀規劃平行作業線,并采用跨行地頭轉向的方式換行作業(圖2)。黎永鍵等[15-16]通過測量矩形田塊頂點坐標規劃平行作業線,并根據拖拉機轉向半徑大小選擇跨行轉向的掉頭方式,利用作業線節點坐標生成作業路徑。孫月平等[17]采集河蟹養殖池塘作業區域頂點坐標,計算規劃軌跡特征點,生成往復遍歷式全覆蓋自動投料路徑。孟志軍等[18]提出一種農機全覆蓋作業路徑優化方法,可根據轉彎數最少、耗能最小、總作業路徑最短等目標計算得到作業方向,并生成較優的作業路徑。劉剛等[19]以鏟車寬度作為正方形柵格邊長建立平地作業區域柵格地圖,融合K-均值和密度均值聚類柵格單元,根據挖高填低和局部搜索策略進行作業路徑規劃。蘆帥等[8]按照圖1a所示5種路徑規劃方法分別進行了播種試驗,發現套行法作業路徑最優。李繼宇等[20]利用柵格法劃分無人機噴施作業區域,規劃全覆蓋導航路線。陳鵬[21]在園藝電動拖拉機的自主作業中,利用柵格法分別對無障礙規則作業區域、無障礙不規則作業區域和有障礙作業區域實現全覆蓋路徑規劃。
國外約翰迪爾、愛科、凱斯、久保田等農機企業推出了含路徑規劃、顯示和監控功能的農機自動導航系統交互顯示終端(圖3a、3b),且符合ISO 11783標準,利于信息數據流的監控和利用,廣泛應用于拖拉機、播種機、植保機械和收獲機等農業機械自動導航作業中。國內農機企業如豐疆、中聯重科、沃得、雷沃主要配套第三方如司南導航、聯適導航、碩博電子、Trimble等公司提供的交互顯示終端產品(圖3c、3d)。

圖3 農機智能終端典型產品Fig.3 Agricultural machinery intelligent terminal typical products
目前國內農機自動導航系統交互顯示終端主要存在功能、界面、數據接口、通信協議非標準化和二次開發困難、成本高等問題,較難推廣應用。各農機企業在提升智能農機品質的同時,未來應該重點提高產品標準化,促進農機智能終端在不同種類、不同品牌農機之間的互換應用,進而有助于決策層對農機數據流的監控、整合、分析和決策。
綜上所述,目前規則邊界地塊全覆蓋路徑規劃技術已比較成熟,但存在同一地塊重復測量、數據利用率較低的問題,因此建立精準的地塊邊界位置信息數據庫及數據共享平臺,智能農機按需自主調用是未來創新發展的一個方向。
1.1.2不規則邊界地塊全覆蓋路徑規劃
在不規則邊界地塊全覆蓋路徑規劃過程中,通常會將地塊分割成多個容易處理的單元分別進行路徑規劃,而且在邊界轉彎處需要特別規劃處理,以避免死區對路徑規劃過程的影響。美國FREITAS等[4]提出一種LKH算法,使植保無人機可以對任意形狀地塊進行全覆蓋路徑規劃,有效覆蓋面積提高了1.54%,作業效率提高了9.54%。日本北海道大學RAHMAN等[22]為了減小聯合收獲機田間作業損失,提出一種適用于N邊形地塊的路徑規劃算法,通過RTK-GPS和IMU傳感器精確測量地塊邊界輪廓點位置,再結合作業幅寬生成作業路徑。法國的TUAN[23]通過算法將不規則的作業區域自動分解為多個凸多邊形,并結合啟發式算法高效完成全覆蓋路徑規劃任務。OKSANEN等[24]對不規則邊界地塊分割為多個簡單地塊分別進行全覆蓋路徑規劃(圖4)。BOCHTIS等[25]以果園耕地機器人最優覆蓋面積為作業目標,對果園行內和行間進行路徑規劃,與傳統作業方法相比總行駛距離減少了2.2%~6.4%。HAMEED等[26]提出一種三維路徑規劃算法,通過估算多余覆蓋面積確定作業方向,有效減少了多余覆蓋面積。

圖4 不規則邊界地塊全覆蓋路徑規劃[24]Fig.4 Full coverage path planning of irregular field
國內,徐博等[27]提出一種植保無人機作業航線規劃算法,可根據指定的作業方向在不規則作業區域規劃耗能較低、耗藥較少的全覆蓋作業航線,田間試驗得到最低多余覆蓋率為2.8%。王宇等[28]將高度起伏的作業環境地圖柵格化,對建立的三維環境模型進行三維路徑規劃,并通過引力搜索算法進行返航點尋優,使作業更加精準、高效。郭九霄[29]通過柵格化不規則邊界田塊,并將邊界死區柵格剔除,保證了無人駕駛插秧機導航路徑規劃的順利進行。宮金良等[30]以多機協同作業整體效能最大為目標進行任務分配,在此基礎上以總遍歷面積覆蓋率最小為目標,結合改進的遺傳算法進行全局覆蓋路徑規劃。
不規則地塊邊界精準信息的獲取和以降低作業成本為導向的路徑規劃算法開發是當前研究的重點。結合農機轉彎特點自適應邊界形狀規劃較優的作業路徑,有利于提高農機對作業環境的適應性。
1.1.3多作業區域全覆蓋路徑規劃
多作業區域全覆蓋路徑規劃是對在同一區域內多個分散田塊連續作業的路徑規劃,包括小田塊內全覆蓋路徑規劃和田塊間作業順序調度優化兩部分,主要用于植保無人機跨地塊作業。VALENTE等[31]提出一種基于HS啟發式算法的無人機多區域作業路徑規劃方法,通過減小轉彎次數降低作業成本。SANDAMURTHY等[32]針對腰果果園作業區域離散問題,研究了一種全區域遍歷路徑規劃算法,最大面積覆蓋率為76%。國內,黃小毛等[33]提出一種適用于多作業區域、復雜邊界田塊(凸多邊形、凹多邊形和帶孔多邊形等)的旋翼無人機作業路徑規劃算法,利用多邊形分組法區分不同形狀的地塊,結合航線排序和航向優化可快速獲得飛行作業軌跡。徐博等[34]利用改進遺傳算法優化了多區域間的作業順序和航線調度策略,實現了植保無人機多作業區域航線規劃,增加了作業效率(圖5)。

圖5 多作業區域全覆蓋路徑規劃[34]Fig.5 Multi area full coverage path planning
隨著無人機續航時間的延長和農藥有效利用率的提高,多作業區域路徑規劃可有效增加作業效率、降低作業成本,是未來的發展方向。
1.2 全局點到點路徑規劃
全局點到點路徑規劃是在作業區域環境信息已知的前提下,規劃從起點到目標點可行的無碰撞路徑,在精準作業、農業運輸和農機跨地塊調度等方面有著非常廣泛的應用。目前,比較成熟的算法有A*算法、蟻群優化算法、遺傳算法、模擬退火算法和粒子群優化算法等。
1.2.1A*算法
A*算法(A-Star)是一種適用于環境信息已知的“點對點”全局路徑規劃算法[35-36],根據估價函數搜索最小代價節點,從而確定最優路徑,估價函數為
F(n)=G(n)+H(n)
A*算法針對靜態作業場景可以有效地規劃出最優作業路徑[37-38],通過改進優化,其在農業機械導航領域得到了廣泛的應用。DUCHO等[39]、HARABOR等[40]通過對比試驗發現通過跳點法(JPS)搜索策略改進A*算法,可有效縮短計算時間。AMMAR等[41]針對大規模柵格路徑規劃問題,通過改進實際代價函數G(n)的計算次數提高算法計算效率。張文等[42]針對溫室機器人在復雜作業環境中的路徑規劃問題,提出一種方向A*算法,通過“視野線”平滑、“圓弧-直線-圓弧”轉彎和二叉堆數據存儲方法實現了平滑路徑、減小碰撞幾率和提高算法效率的目的,如圖6所示。李云伍等[43]為解決自主行駛轉運車在丘陵山區田間道路網行駛路徑的規劃問題,對A*算法進行改進,采用歐幾里得距離作為啟發函數,且將路口道路曲率和道路起伏度引入到實際代價函數G(n)中,使算法更加適應丘陵山地道路起伏變化的特征。李靖等[44]利用A*算法對植保無人機在含障礙物作業區域的軌跡進行修正。
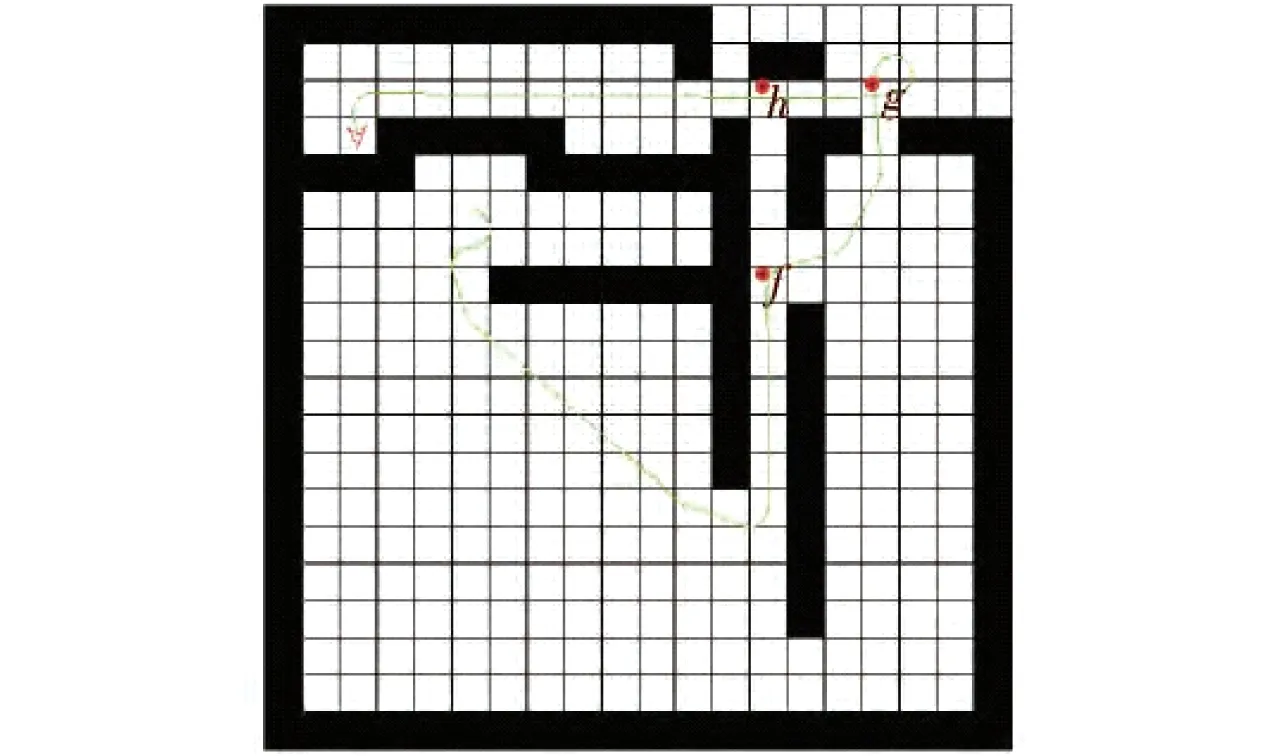
圖6 方向A*算法路徑規劃[42]Fig.6 Directional A* algorithm path planning
當作業場景較大且導航精度要求較高時,創建的地圖柵格節點數量巨大,A*算法存在搜索計算耗時較長,占用計算機內存資源較高的缺點,未來可以通過動態調整柵格地圖分辨率或利用圖像處理技術輔助引導搜索方向,增加路徑規劃的效率。
1.2.2蟻群優化算法
蟻群優化算法(Ant clony optimization, ACO)[45]通過模擬蟻群成員間信息正反饋交流搜索食物的過程,達到尋求較優路徑的目的,搜索能力強且求解性能具有較好的魯棒性[46-48],但收斂速度慢、容易陷入局部最優,信息素結構優化是目前研究的重點[49-50]。
國內外學者針對不同應用場景對蟻群優化算法進行了深入探究和改進優化。EBADINEZHAD等[51]通過智能選擇搜索空間節點和改進信息素矩陣,達到避免局部最優且降低計算時間的目的。LEE等[52]通過將目標點與起始點互換進行二次計算搜索,避免算法陷入局部最優解。國內,曹如月等[53]利用蟻群算法對多機協同作業任務序列進行優化,有效降低了路徑代價。張強等[54]通過改進蟻群優化算法中信息素更新策略,根據收斂次數的變化動態調整信息素的更新速度,保證了算法收斂性和搜索速度的統一。王宇等[55]提出了一種基于改進蟻群優化算法的植保無人機路徑規劃方法,可以對多個作業區域的作業順序進行合理排序,減少飛行路徑總長度。景云鵬等[56]通過改進蟻群優化算法提出一種適用于農田平整作業的三維路徑規劃方法,適用于農田平整的局部路徑規劃。黃辰等[57]利用簡化A*算法優化蟻群優化算法的初始信息素,以減少初次搜索的盲目性,并通過閉環反饋動態調節參數,提高最優路徑搜索能力。劉建華等[58]利用人工勢場合力思想優化蟻群優化算法中信息素擴散方向,提高了算法收斂速度。
1.2.3遺傳算法
遺傳算法(Genetic algorithm,GA)[59]是一種模擬自然生物遺傳和進化過程搜索最優解的算法,主要通過交叉、變異、選擇3種基本操作算子并行迭代求得優化解,在組合優化、機器學習等方面得到了廣泛的應用[60-63]。HAMEED[64]利用遺傳算法將按作業幅寬分割好的條形地塊進行排序優化,降低了作業重疊區域面積和非工作路徑長度。為了降低溫室機器人多目標農藥噴灑作業成本,MAHMUD等[65]通過虛擬試驗對比發現第三代非支配排序遺傳算法(NSGA-Ⅲ)較第二代非支配排序遺傳算法(NSGA-Ⅱ)的作業路徑規劃效果更優,如圖7所示。禹建麗等[66]利用遺傳算法對無人駕駛農用運輸車在復雜環境中進行避障路徑規劃。為使多臺聯合收割機無沖突高效協同作業,姚竟發等[67]利用改進遺傳算法IGA進行路徑優化,與傳統并排作業相比總作業時間降低了2.4%以上。賈全等[68]在拖拉機自動駕駛系統上線路徑規劃中,采用遺傳算法與量子計算相結合的方法對B樣條曲線控制點進行參數優化,有效減小了上線距離。

圖7 遺傳算法路徑規劃[65]Fig.7 Genetic algorithm path planning
1.2.4模擬退火算法
模擬退火算法(Simulated annealing,SA)借鑒了固體冷卻時內部粒子逐漸變為有序的熱力學過程,是一種基于概率近似求解最優化問題的方法,廣泛應用于大規模組合優化問題,魯棒性好且有較強的搜索能力[69-72]。CONESA-MUOZ等[73]利用模擬退火算法進行大田多機協同作業路徑優化,有效減小了總作業路徑和總作業時間。MIAO等[74]為了提高機器人在動態障礙物環境中的路徑實時規劃能力,通過改進啟發函數選擇路徑,顯著提高了算法在動態路徑規劃中的性能,仿真結果如圖8所示。范葉滿等[75]通過模擬退火算法對山地作業環境下的植保無人機進行能耗最優路徑規劃,負載實時變化的工況下能耗最優路徑比常規路徑節約能耗32.04%,比最短路徑節約能耗11.72%。

圖8 動態障礙物環境中SA算法路徑規劃[74]Fig.8 Path planning of SA algorithm in dynamic obstacle environment
1.2.5粒子群優化算法
粒子群優化算法(Particle swarm optimization,PSO)[76]是一種模擬鳥群覓食過程中綜合個體經驗和同伴經驗動態調整最優搜索策略的過程。由于PSO算法本身對目標函數沒有依賴性,計算過程簡潔且易實現的特點使其在智能車輛路徑尋優與避障及多機群作業路徑規劃中被廣泛使用[77-81]。但傳統的PSO算法存在收斂精度低、停滯搜索等問題,后繼學者通過自適應調整慣性權重因子和加速因子[82-83]優化算法參數、增加粒子多樣性[84]的方式改進PSO算法。
LI等[85]提出一種基于PSO的混合算法,以農業無人機群的調度距離最小為目標,利用變量鄰域下降法(VND)加速粒子群優化的收斂速度,用于解決作業過程中多架無人機路徑尋優問題。SETHANAN等[78]提出了一種基于多重社會結構的多目標粒子群優化算法(MO-GLNPSO),增加粒子多樣性以提高全局及局部搜索能力。LI等[86]以無人機作業飛行時間和安全性能等級為約束目標,利用粒子群優化算法進行路徑規劃。賈會群等[84]通過自適應調整粒子群算法參數提高算法的搜索能力,利用更新方程對搜索停滯粒子進行擾動,并使其靠近全局最優解。孟慶寬等[87]利用粒子群優化算法求解作物行直線方程參數,進而得到導航路徑。
在面對復雜的農田作業環境時,傳統粒子群優化算法的缺陷進一步被放大,降低了路徑規劃的計算效率和可靠性。通過改進型粒子群優化算法或采用多種人工智能算法(模糊神經網絡、遺傳算法、蟻群算法等)融合[88-91]的方式動態調整慣性權重等參數,提高算法的收斂性和改進算法更新方程是目前研究的重點。
2 局部路徑規劃研究進展
隨著先進傳感器技術的發展和信息處理技術的提高,農業機械對外部環境信息的感知能力和解析能力也在逐漸提升。局部路徑規劃技術的出現使農機作業自主性增強,降低了人工參與度。局部路徑規劃是在作業區域環境信息部分未知或完全未知的情況下,基于農業機械外部傳感器感知作業區域環境信息進行的實時路徑規劃。由于農業作業環境信息復雜、隨機性高[92-93],因此對算法的實時性和魯棒性有很高的要求。單一傳感器較難在復雜農業作業環境中完成既定任務,需通過多傳感器融合技術精準感知環境信息,從而提高自主導航的可靠性。目前,農業環境條件下常見的局部路徑規劃有避障路徑規劃和局部跟蹤路徑規劃。
2.1 避障路徑規劃
自主避障是農業機械智能化作業的基本要求,可保障農機裝備在復雜農田環境中安全作業[5,94-95]。農業機械通過傳感器獲取作業環境中障礙物的方位和大小信息,經計算分析后實時動態地規劃一條安全無碰撞路徑。較為成熟的避障路徑規劃方法有人工勢場法、模糊邏輯法、動態窗口法和幾何法。
2.1.1人工勢場法
人工勢場法(Artificial potential field,APF)由KHATIB[96]在1986年提出,并將其引入到移動機器人避障路徑規劃領域。人工勢場法將環境信息抽象為引力場和斥力場,目標點對移動機器人產生吸引力,障礙物對移動機器人產生排斥力,移動機器人受到的所有斥力和引力的合力決定了其移動方向,算法實時性較好,但容易陷入局部最優解[97-100]。
WANG等[101]通過改進人工勢場法的排斥場函數且增加虛擬目標點,提高移動機器人對在含有動態障礙物環境中的避障路徑規劃能力。ROSTAMI等[102]通過改進引力場函數和和斥力場函數,避免陷入局部最優解,仿真結果如圖9所示。張禮帥[103]在果園無人噴霧機的路徑規劃研究中,利用雙目視覺傳感器感知工作環境信息,并基于改進的人工勢場法在含有動態障礙物的作業環境中實時規劃避障路徑。王振武[104]通過在無人噴霧機上加裝激光傳感器來獲取作業過程中障礙物的位置信息,利用改進的人工勢場法進行局部避障路徑規劃,并實時更新全局路徑信息。彭湘等[105]利用改進勢場-蟻群融合算法解決全局路徑規劃與局部避障的路徑規劃問題,路徑拐點數明顯減少。
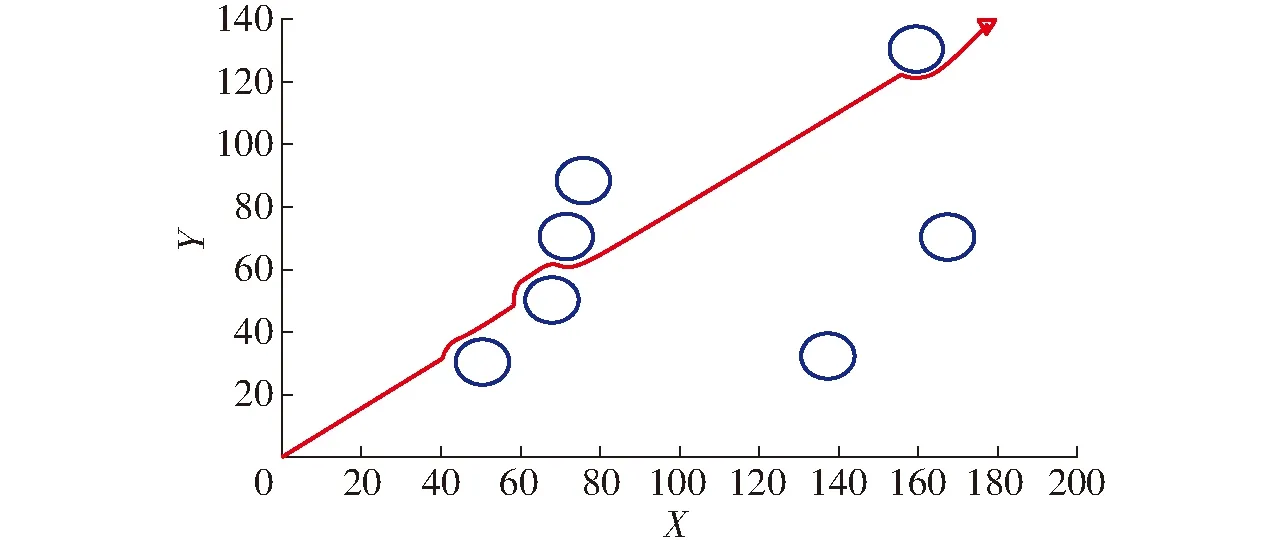
圖9 改進人工勢場法路徑規劃[102]Fig.9 APF algorithm path planning
2.1.2模糊邏輯法
模糊邏輯法(Fuzzy logic,FL)是根據專家的知識經驗判斷制定控制規則,根據推理建立輸入和輸出關系,并結合傳感器感知的環境信息實現機器人實時路徑規劃的方法,算法實時性和控制效果較好。
ZAVLANGAS等[106]利用移動機器人與障礙物之間的距離和角度建立模糊邏輯規則進行實時路徑規劃。周俊等[107]利用雙目立體視覺傳感器獲取障礙物相對移動機器人的方向和距離信息,結合模糊邏輯設計了具有學習能力的自主導航移動機器人,可使機器人在未知復雜環境中積累學習經驗,自主適應農業環境作業條件。謝守勇等[108]利用紅外測距傳感器測得的溫室移動機器人與障礙物的距離變化量和前進方向與障礙物的角度變化量作為模糊控制器的輸入量,以轉向角變化量作為輸出量,實現移動機器人根據作業環境選擇前進方向。郝冬等[109]提出一種將模糊邏輯控制和行為控制相結合,并通過目標導向和避障兩個基本行為進行路徑規劃的策略。郭娜等[110]在傳統模糊控制算法規劃路徑過程中加入了障礙逃脫策略,可使移動機器人走出陷阱區。謝永良等[111]針對輪式AGV循跡受阻問題,利用8路超聲波測距傳感器檢測葡萄園壟道和障礙物,結合模糊邏輯法進行避障軌跡規劃。
2.1.3動態窗口法
動態窗口法(Dynamic window approach,DWA)的主要思想是在包含線速度和角速度的速度空間內采樣多組速度,在這些速度條件下結合運動學模型計算預測下一時間間隔內的軌跡,再根據制定的評價規則選擇最優的行走路徑[112-113]。動態窗口法是將位置控制轉化為速度控制的方法,有較好的實時避障路徑規劃能力。
SEDER等在動態窗口法的基礎上結合FD*算法,先后在含靜態障礙物[114]和含動態障礙物[115]的環境中進行實時路徑規劃研究,均取得了良好的效果。MOLINOS等[116]提出了兩種基于動態窗口法的局部路徑規劃算法(DW4DO、DW4DOT),對動態障礙物的避障效果顯著。勞彩蓮等[117]利用超聲波傳感器檢測移動機器人的作業環境信息,通過動態窗口法對局部運動軌跡做出預測,由評價函數從預測的軌跡線簇中選擇最優軌跡(圖10)。
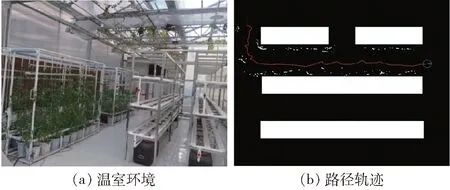
圖10 溫室環境和路徑軌跡[117]Fig.10 Greenhouse environment and path trajectory diagram
2.1.4幾何法
幾何法是利用傳感器獲取農機和障礙物的位置信息生成多個無障礙幾何曲線段,然后在一定約束條件下按順序連接形成避障代價最小路徑的方法,多用于含靜態障礙物的農田作業環境中。
LIU等[118]通過分析直線作業路徑上障礙物的位置關系,提出了一種由3個圓弧構成的小障礙物避障方法。呂恩利等[119]基于激光傳感器設立障礙物動態識別區,在轉彎半徑、曲率等約束下采用四次五階準均勻B樣條曲線分段合并生成避障路徑。劉宇峰等[120]通過雙目視覺傳感器定位障礙物位置,結合拖拉機運動學模型規劃避障圓弧,并采用分段圓弧連接的方法得到避障代價最小的路徑,如圖11所示。奚小波等[121]利用三階Bezier曲線優化法對不連續的最短切線路徑優化為連續平滑的避障路徑。
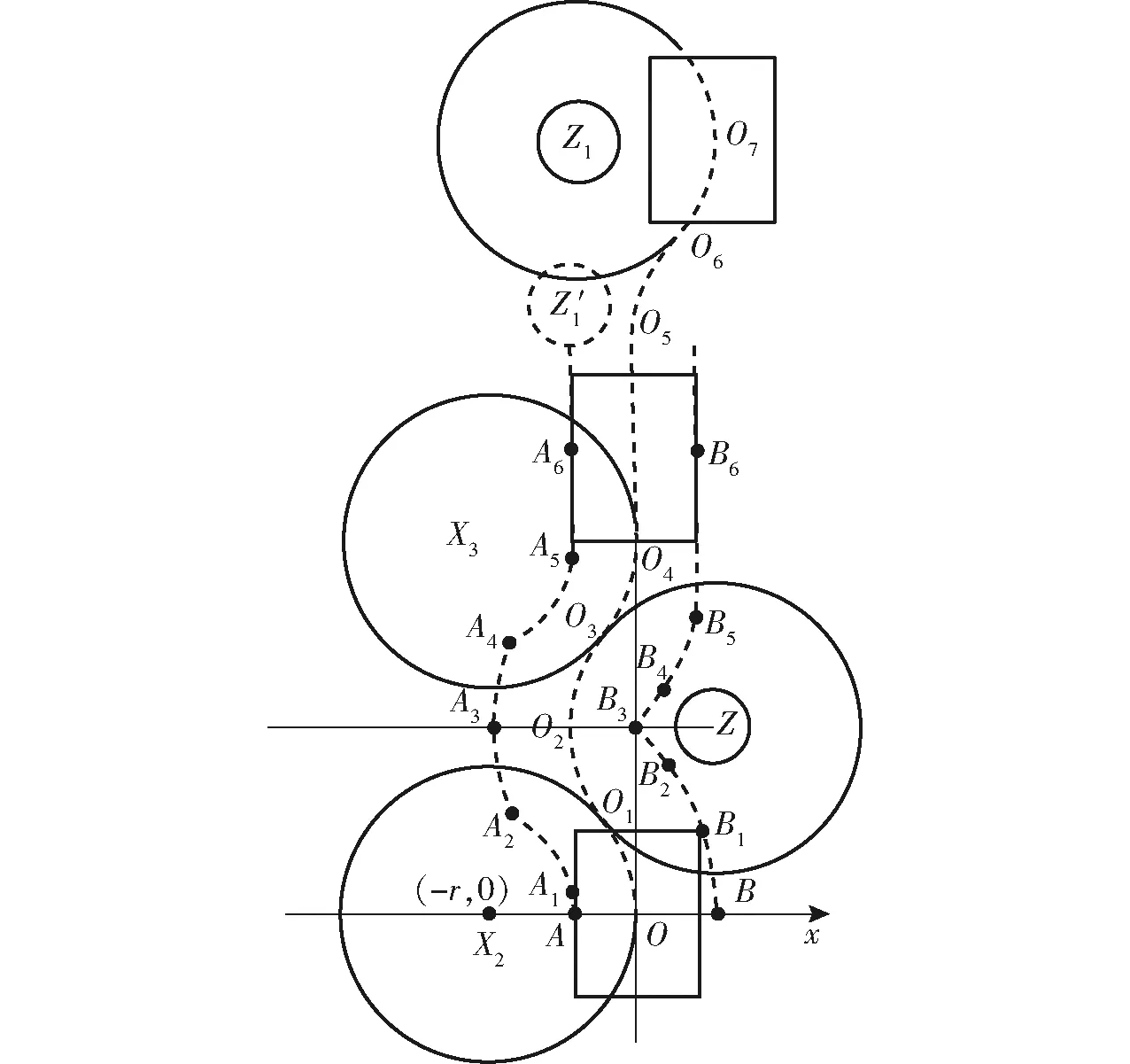
圖11 幾何法避障路徑規劃[120]Fig.11 Geometric obstacle avoidance path planning
利用幾何法進行避障路徑規劃簡單高效、易實現,難點是農機在運動狀態下能夠利用傳感器精確獲取障礙物的位置,并結合自身位姿和運動狀態作為初始條件激活避障算法進行避障。未來研究重點應為動態空間位姿解算和運動學模型優化。
2.2 局部跟蹤路徑規劃
局部跟蹤路徑規劃是農機在路徑跟蹤過程中,從當前位置向預設路徑靠近的局部路徑規劃策略,較大程度上決定了自動導航的跟蹤精度。局部跟蹤路徑規劃應用最多的純追蹤模型是一種模擬人工駕駛過程的幾何方法,利用計算得到的圓弧連接車體與預瞄點。目前重點研究內容是根據速度、橫向偏差和航向偏差動態調整模型前視距離,規劃出合適的局部跟蹤路徑。
魏爽等[122]建立了基于預瞄點搜索的純追蹤模型(圖12),適用于直線和曲線預設路徑的局部跟蹤路徑規劃。李革等[123]根據插秧機車速和路徑彎曲程度調整前視距離,可實時更新車輛與預設路線之間的跟蹤路徑。王立輝等[124]以聯合收獲機速度、航向誤差和校正后的橫向誤差設計模糊控制器,動態調整純追蹤模型的前視距離。張華強等[125]利用粒子群優化算法對純追蹤模型的前視距離動態調整。唐小濤等[126]以橫向偏差和車速為模糊邏輯控制器輸入、前視距離為輸出,進而動態調整跟蹤路徑。

圖12 基于預瞄點搜索的純追蹤模型[122]Fig.12 Pure pursuit model based on pre-point search
目前對局部跟蹤路徑規劃方法的研究較少,未來應結合農機自身特性和農田作業環境探究實時性好、可靠性高的局部跟蹤路徑規劃策略,以滿足高精度路徑跟蹤的需求。
3 展望
導航路徑規劃是實現農機導航跟蹤控制的前提,國內外學者結合復雜農業生產環境需要,對導航路徑規劃開展了較為深入的研究,以降低作業成本為目的,在預作業區域內為自動導航規劃較優的無障礙作業路徑。全局路徑規劃技術比較成熟,在精準作業、農業運輸和農機跨地塊調度等方面有著非常廣泛的應用。由于農業作業環境的復雜性和時空變異性,局部路徑規劃對算法的實時性、高效性、魯棒性和安全性有著較高的要求,作業環境感知、路徑優化和算法改進是目前研究的重點。
未來可從以下方面進行理論創新和技術突破:
(1)數據資源標準化及規劃路徑共享:現在全局路徑規劃存在同一地塊重復測量規劃、數據利用率較低等問題,未來可通過高精度定位系統測繪農田邊界信息,建立精確的地理信息數據庫、標準化數據接口和通信協議,提高數據資源利用率,促進規劃數據共享,增強農業機械按作業環節、農藝要求和機型參數自主規劃較優作業路徑的能力。
(2)提高環境信息感知和解析能力:局部路徑規劃對環境信息依賴程度較高,目前主要存在傳感器單一、復雜環境中位姿解析能力不足等問題。未來可以利用多傳感器融合技術精準獲取環境信息,并通過改進優化算法提高對環境的解析能力。
(3)增強實時動態規劃性能:目前局部路徑規劃在應對農業作業環境的復雜性和時空變異性方面尚有不足,與實際生產作業需求還有差距。未來可以通過融合人工智能等算法進一步減少計算時間、提高魯棒性,增強農業機械實時動態規劃性能。
(4)路徑規劃與農業機械自身特性適當結合:路徑規劃的主要目標是滿足作業任務需求,所以目前農業機械導航路徑規劃大多只考慮作業幅寬和轉彎半徑等運動學參數,往往忽視了農業機械自身動力學、控制系統響應等特性差異引起的導航誤差。因此未來可以適當結合農業機械自身特性進一步開展研究,增加規劃路徑對農機的適應性,從而提高導航精度和作業效率。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
