基于NAIS事故數據聚類的丁字路口危險場景研究
2021-10-14 08:31:20廖靜倩張道文廖文俊
汽車安全與節能學報 2021年3期
廖靜倩,張道文,2 ,高 立,廖文俊,2,3
(1. 西華大學 汽車與交通學院,成都 610039,中國;2. 汽車測控與安全四川省重點實驗室,成都610039,中國;3. 四川西華司法鑒定中心,成都 610039,中國)
近年來,中國交通事故數量不斷增加[1]。2017年中國發生的交通事故達20萬余起,其中發生在路口的交通事故就有4萬余起,占比超過了20%[2]。隨著中國城市規模的不斷擴大,路網變得逐漸復雜,道路路口作為不同道路參與方的匯合中心,參與方與周圍復雜環境構成的視野盲區和多條道路匯合后的沖突點均比普通路段多,交叉路口是比較典型的復雜危險場景,其中,丁字路口是典型的交叉路口。2017年,中國發生在丁字路口的交通事故數僅次于十字路口和普通路段[3]。因此,研究分析丁字路口的交通危險事故場景對事故防控和降低參與方在路口處的傷亡有重要的意義。
伴隨自動駕駛汽車的發展,研究輔助駕駛技術的測試場景、構建不同狀態下的危險場景已經成為當前的研究熱點。
目前國內外大多數學者都是基于交通事故數據對危險測試場景進行提取研究。胡林等[4]基于車碰兩輪車事故案例進行聚類分析,得到11種車碰兩輪車事故場景。范天賜等[5]基于160起事故案例,分析兩輪車事故的典型場景,并與國外的兩輪車測試場景進行對比。B. Sui等[6]通過提取CIDAS數據庫中車碰兩輪車的數據,通過K-均值聚類,最后得到6種車碰兩輪車的典型碰撞場景。毛攀[7]利用國家車輛事故深度調查體系(National Automobile Accident in-Depth Investigation System,NAIS)數據庫數據,聚類得出6種車與兩輪車危險場景,用于AEB避撞研究。侯彥巧[8]以騎車人損傷嚴重程度為主要因素提出5類符合中國道路特點的汽車與兩輪車典型場景。HUANG Sunan 等[9]對STRADA數據庫中發生在交叉口的人車碰撞數據進行分析,建立汽車進出交叉口與行人發生碰撞場景下的數學模型。D. Good等[10]根據美國道路人車事故中車輛速度分布特點,通過層次聚類將速度分布簡化為典型的速度場景。周華等[11]利用發生在十字路口的車與兩輪車數據,聚類得到5類典型危險場景,并進行推演。
有一些學者基于自然駕駛數據進行研究,蘇江平等[12]基于車碰行人的自然駕駛數據,利用多元統計的方法進行了典型場景的提取。吳斌等[13]通過中國自然駕駛數據,對直行追尾危險場景進行了研究。李霖等[14]通過自然駕駛工況的視頻數據,得到7類騎車人典型危險場景。夏瀾等[15]通過China-FOT數據庫中的自然駕駛數據,篩選后聚類得到4種切入型危險工況下的自動緊急制動系統(autonomous emergency brake AEB)測試場景。郭景華等[16]通過自然駕駛數據得到3類典型場景,預測前車隨機運動狀態。劉穎等[17]通過采集的發生在上海的自然駕駛數據,聚類得到了5類典型行人危險場景。
也有國外學者基于現有的道路法規建設等知識,通過理論知識體系演繹建立測試場景[18]或者通過隨機采樣的方法來生成測試場景[19~20]。
基于層次的聚類方法是目前應用最廣泛的聚類方法[21]。大多數學者均采用層次聚類的方法對事故數據或駕駛數據進行聚類。常見的聚類分析方法還有K-均值聚類、分解法等。分解法是將所有樣品基于某種規則自上而下的進行分裂,但通常不對已經做出的分裂決策進行回溯,應用較少;K-均值聚類法需要給出均值的定義,對選取的初始聚類中心較敏感,對聚類分析的結果影響較大。對于數據量不大的數據組,運用層次聚類法可以降低主觀意識對類別的影響,重復性強。本文將采用層次聚類的方法對事故數據挖掘,提取典型危險場景。
對于復雜的交通環境,僅靠知識體系進行邏輯推理建立的場景與現實情況有很大的差別,因此學者們大多通過數據采集,采用聚類分析的方法對危險事故場景進行挖掘,但主要是針對某種特定的參與方,未充分考慮交通道路形態,并且將事故數據里的動態參數與靜態參數結合在一起進行分析,這可能對樣本間的相似度造成一定影響。同時,基于某種具體道路形態的研究較少。因此,本文選取了丁字路口作為研究對象,根據發生在丁字路口的事故數據,進行統計篩選與聚類分析,深入挖掘發生在丁字路口處的危險事故。同時通過構建事故參與方在丁字路口的運動學模型,推演得到事故參與方在不同運動狀態下的主要運動參數危險閾值。該結果可以為目前輔助駕駛技術系統的開發測試提供理論依據,為評估輔助駕駛系統提供一種更加經濟、客觀和可擴展的測試基礎。
1 丁字路口的危險場景聚類
1.1 交通事故數據來源
本文基于國家車輛事故深度調查體系(NAIS)數據庫,從中篩選出277起發生在丁字路口的交通事故案例,篩選規則為:事故參與方總數為2,事故參與方除去行人,且各參與方的數目均為1個,事故數據完整且有效。
1.2 層次聚類法
本文采用層次聚類法對發生在丁字路口的事故數據進行聚類分析。層次聚類法首先將各樣本單獨作為一類,記為n類; 然后計算樣本兩兩之間的距離,合并距離最近的一類,得到n-1類,再從n-1類中合并距離較近的兩類,得到n-2類,一直重復下去,直至所有樣本聚成一類[22]; 最后畫出聚類樹形圖,根據樹形圖得出聚類數和具體的聚類結果。樣本間距離計算采用絕對值距離算法。設第i個樣本xi和第j個樣本xj之間的距離為dij,則

其中:p為樣本參數的總個數;xik為樣本xi的第k個參數,xjk為樣本xj的第k個參數。
采用類平均法計算類間距離,采用該方法求出類與類之間平方距離的平均值。設類Gk中有K個樣本,GL中有L個樣本, 則類Gk和GL之間的平方距離DkL定義為:

其中,dij為樣本間絕對值距離。
1.3 場景特征要素提取
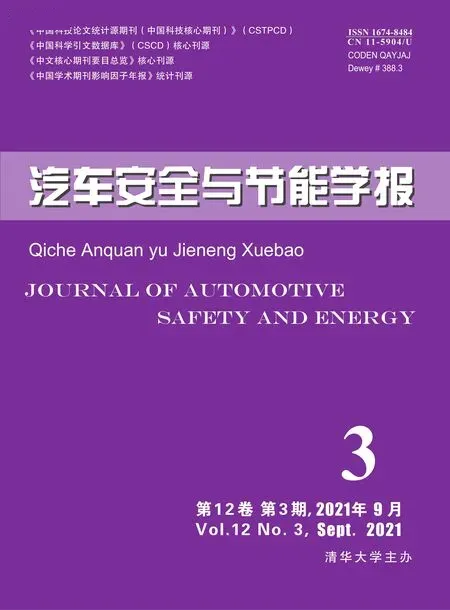
依據智能駕駛輔助技術的特點以及主動安全系統運行所需的感知系統和決策方法,選取特征要素,測試主體要素選擇了兩參與方的車型和運動類型。測試環境要素選擇了天氣、事故發生時段、道路類別以及路口信號燈。根據中國道路使用特點,可分為城市道路、公路、廠礦道路、林區道路和鄉村道路[23]。根據篩選出的事故案例,將道路類別劃分為城市道路、鄉村道路和公路及其他。所有選取的參數變量均為名義變量,對于名義變量只有類別之分,沒有數值關系。由于事故發生時段晨昏的占比極小,因此將晨昏合并入日間。將選取的參數變量采用數值表示,具體參數變量取值如表1所示,其中涉及到三值名義變量的,進行標準化處理,將1個三值變量轉換為3個二值變量表示。方法如表2所示。
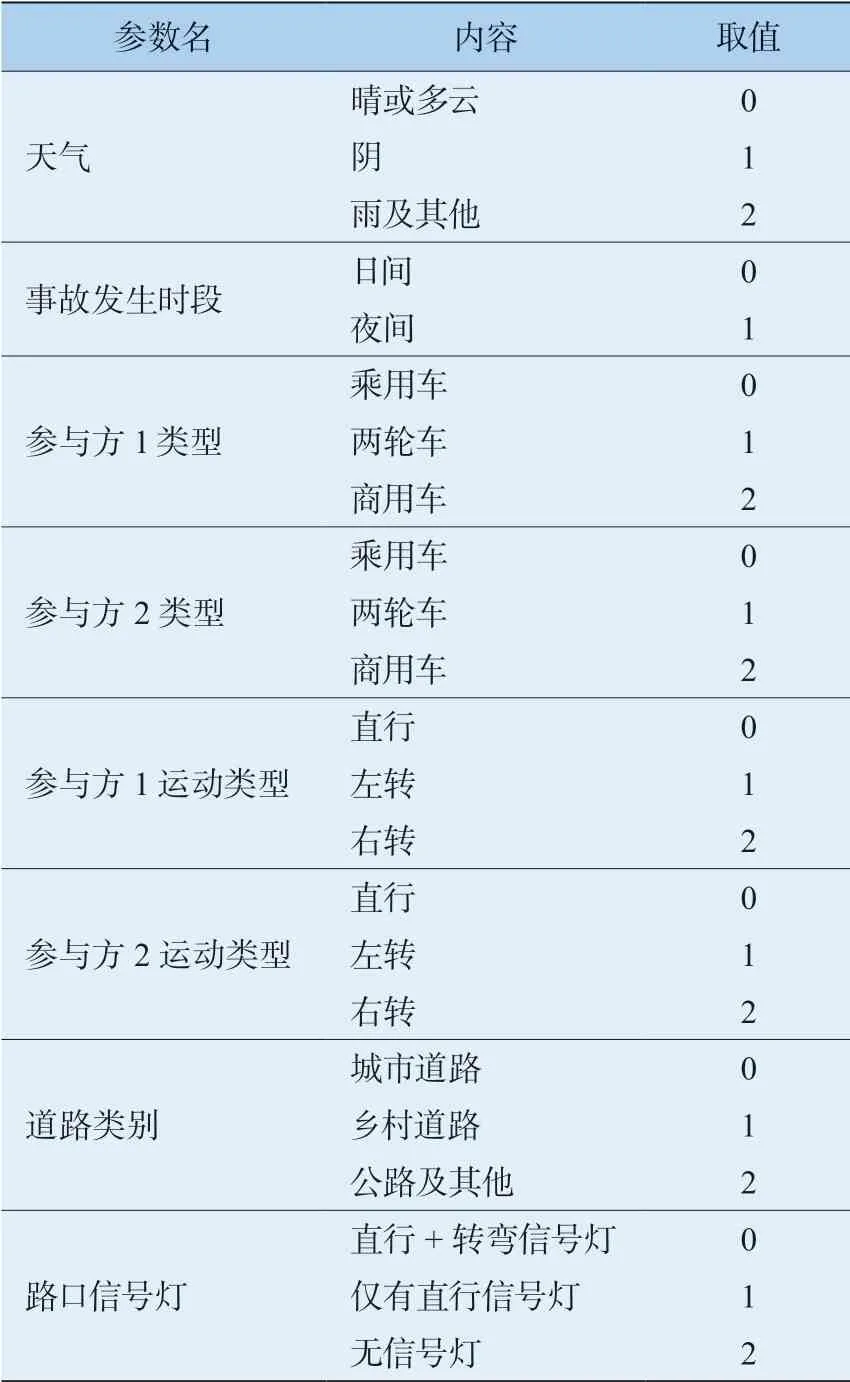
表1 參數變量取值
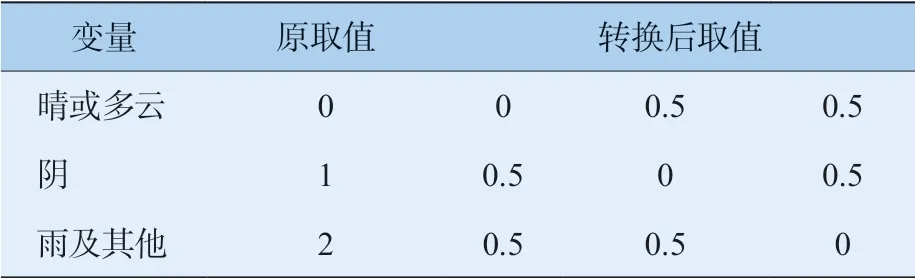
表2 三值變量轉換為二值變量
1.4 丁字路口聚類分析
根據層次聚類法原理和選取的參數變量取值,通過MATLAB軟件進行聚類分析,將277個樣本單獨作為1類,然后計算類與類之間的距離,當得到的所有類別之間的距離較大,不能合成新的1類時,停止聚類。利用聚類分析結果中的不一致系數確定類的個數。如圖1所示,聚類次數在第273次與第274次時的不一致系數發生突變,第274次聚類不一致系數比273次聚類不一致系數大幅度上升,不一致系數增加的幅度越大,則上一次聚類效果越好。說明第273次聚類的效果比第274次聚類好。因此將聚類結果聚為4大類。具體的聚類結果如表3所示。

表3 聚類統計結果
圖1 不一致系數
根據聚類結果里不同參數的占比情況,將占比最高的參數變量作為每一類場景的特征參數。根據聚類結果,得到4類丁字路口典型危險場景,如下表4所示。
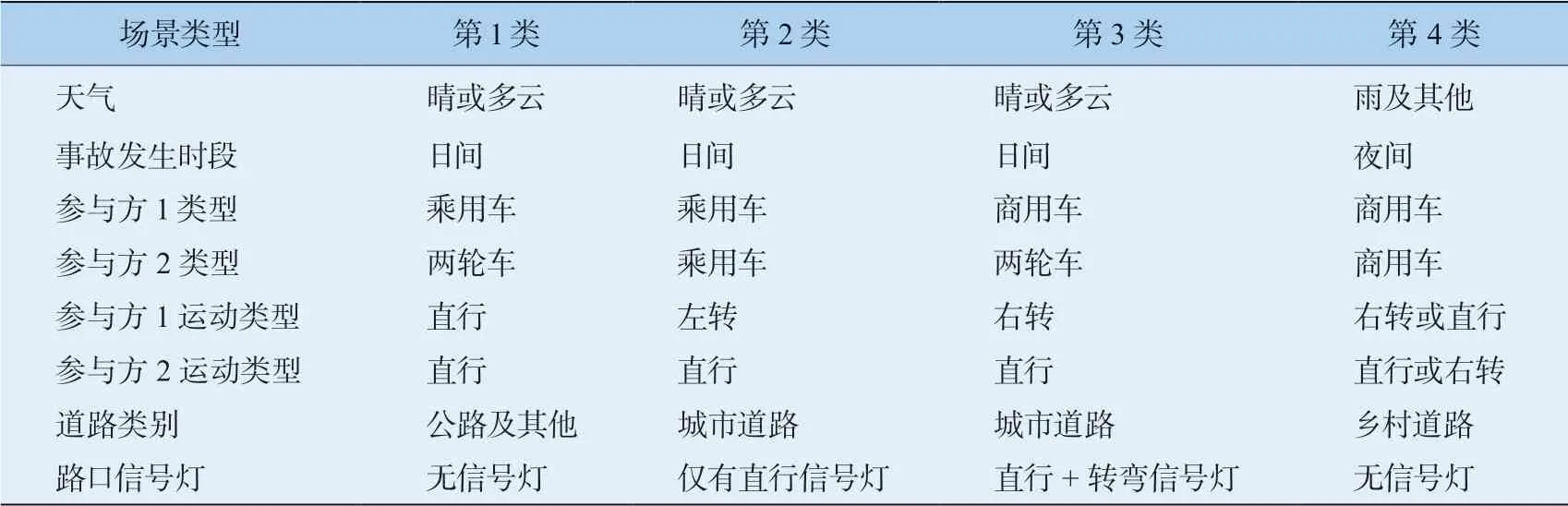
表4 丁字路口典型危險場景
第1類場景是在晴天、無信號燈的路口,乘用車直行與兩輪車直行的沖突;第2類場景是僅有直行信號的城市道路路口,乘用車左轉與另一輛乘用車直行時發生的沖突;第3類場景是有直行和轉彎信號燈的路口,商用車右轉與兩輪車直行發生沖突的場景;第4類場景,是夜間、雨天的鄉村道路路口,商用車與商用車之間發生的直行和右轉沖突,占比相對前3種類別較小,但也是一類發生在丁字路口較典型的危險場景。
丁字路口的第1類場景,在日間(照明條件好的情況下),2個參與方分別為乘用車和兩輪車,行駛狀態均為直行。該類場景是含有事故案例數最多的工況,代表了乘用車與二輪車事故在丁字路口常見的形態。第2類場景中,在只有直行信號的丁字路口,左轉的乘用車駕駛員往往會在出現判斷失誤,以及在爭搶路權的情況下進入丁字路口,此時容易與直行進入丁字路口的乘用車發生碰撞沖突。第3類場景中,丁字路口處有直行和轉彎信號燈,因為駕駛員容易依賴于交通信號燈,或者是在加速通過路口前,交通信號改變,即使有交通信號控制設備,也容易發生交通沖突。
聚類得出的2、3、4類場景,均是2個參與方在丁字路口處發生轉彎沖突的場景。有學者研究發現[24],行駛中的車輛通常在直線行駛和轉彎時發生碰撞。由于丁字路口形態的特殊性,車輛參與方在丁字路口的運動狀態有多種組合方式,對聚類后的交通事故數據進行分析,選取占比大的組合為該類場景下參與方的運動狀態組合,圖2給出了第2、3、4類聚類場景示意圖。第2類場景下車輛在丁字路口發生沖突的方式主要有2種情況,總占比達78.6%:場景1如圖2a所示,占比28.6%;場景2如圖2b所示,占比50%。在第3類場景中,商用車在路口右轉,兩輪車在商用車一側同方向上直行的沖突運動方式占比60%。這是因為商用車轉彎時,自身的長寬尺寸造成的視野盲區會增加發生事故的風險。商用車在丁字路口右轉,后視鏡盲區以及AB柱盲區都容易忽視從一側直行駛來的兩輪車,并且因為兩輪車體積較小,商用車駕駛員也更加難以發現。因此將此運動方式作為第3類場景下2個參與方的沖突運動方式。在轉彎過程中,駕駛員的操作和駕駛員對周圍車輛運動狀態的判斷很重要,為進一步挖掘3類轉彎危險場景下的危險碰撞范圍,本文下面將分別對2個參與方在這3類丁字路口危險場景下的運動狀態進行分析,構建基礎的運動學模型,對3類轉彎危險場景進一步推演。
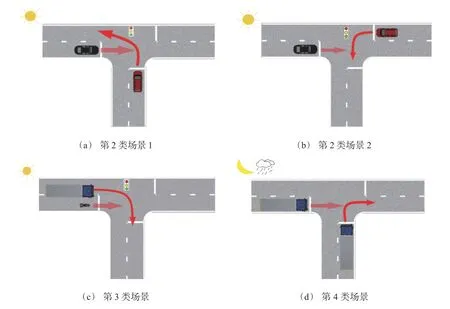
圖2 3類轉彎場景示意圖
2 丁字路口典型場景分析及推演
2.1 丁字路口乘用車與乘用車危險場景推演
根據聚類得到的第2類場景,對兩乘用車在丁字路口發生碰撞的運動形態進行分析。對于三相位信號控制的丁字路口,理論上沒有交通沖突,所以在推演過程中,丁字路口均設置為無信號燈控制,假設兩乘用車進入丁字路口均處于勻速運動的狀態。對兩乘用車運動軌跡進行分析,構建最基礎的運動學模型如圖3所示。
由圖3可知,兩乘用車運動軌跡的交點為推測碰撞區域的中心點,設乘用車1最前端到推測碰撞區域中心點的距離為X1(根據車輛的行駛方向,當車輛最前端越過推測碰撞區域中心點時,X1的參數取值為負值),乘用車2最前端運動到推測碰撞區域中心點的距離為S1,乘用車1的行駛速度為v1,乘用車2的行駛速度為v2。考慮兩乘用車的外形參數,假設乘用車1的長為L1,寬為W1,乘用車2的長為L2,寬為W2。碰撞邊界的運動學公式如下:
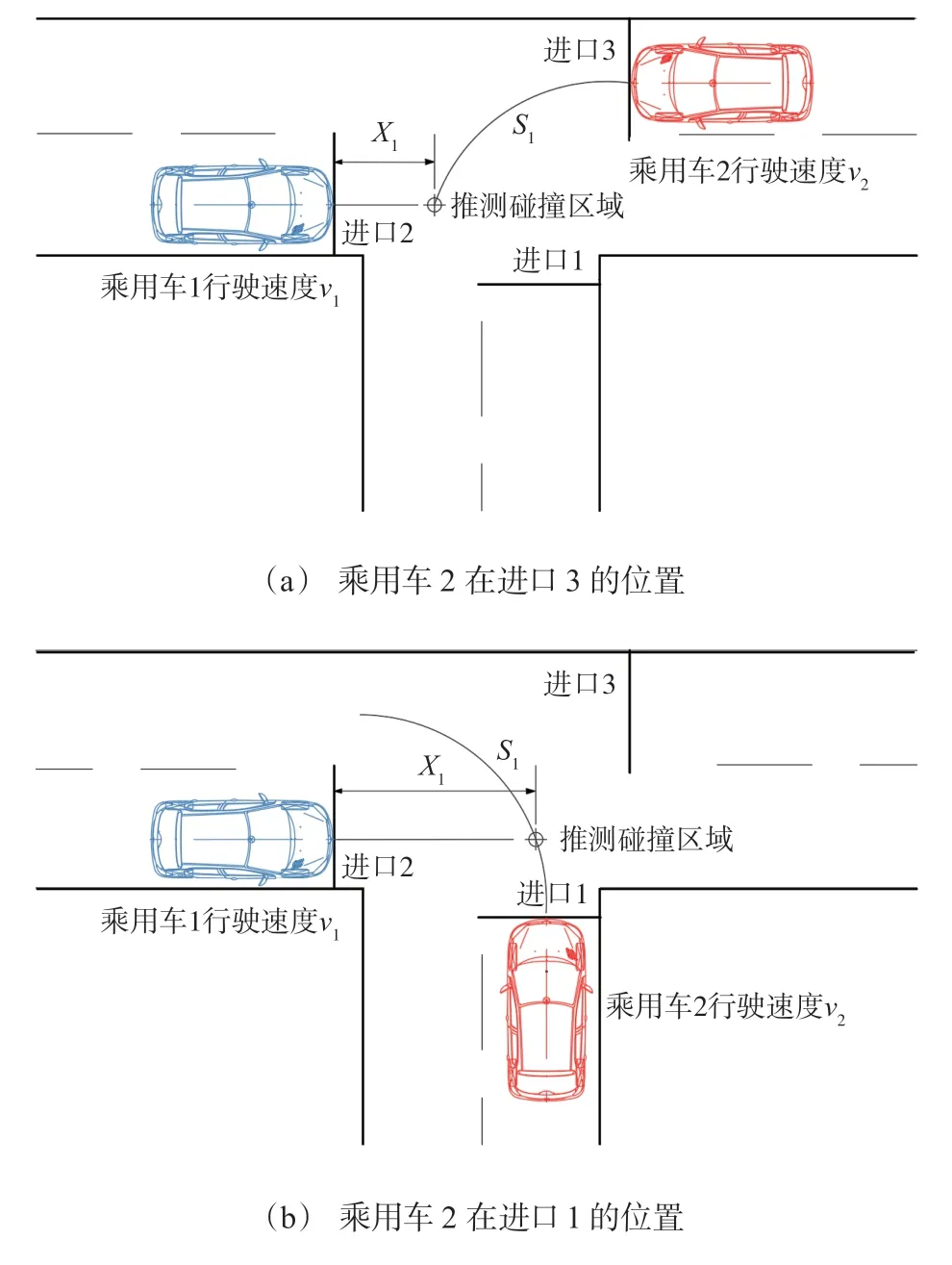
圖3 兩乘用車在丁字路口的運動形態
1) 當乘用車1速度較快,但不足以避開乘用車2時,乘用車1的尾部會與乘用車2的頭部發生碰撞,此時建立兩乘用車基于時間的運動學公式(3):
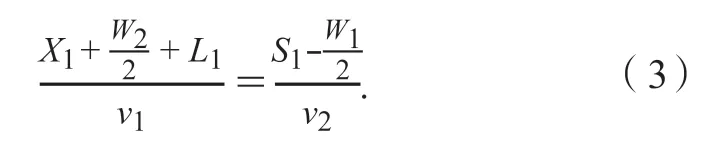
2) 當乘用車2速度較快,但不足以避開乘用車1時,乘用車2的尾部會與乘用車1的頭部發生碰撞,此時建立兩乘用車基于時間的運動學公式(4):
對丁字路口危險場景的推演基于最簡單的路口形態,乘用車2的轉彎軌跡S1在路口形態的限制下,在小范圍內波動,軌跡參數X1是自動緊急制動系統(AEB)測試的重要參數,將兩乘用車尺寸L1、W1、L2、W2以及S1均作為常數考慮。根據NAIS數據庫中統計出的發生在丁字路口兩乘用車的碰撞事故,篩選后在PC-Crash軟件中進行仿真,讀取轉彎軌跡長度,最后取中位數S1為13.8 m。同時參考NAIS數據庫中對乘用車尺寸的范圍特征,乘用車長度一般為3 800~4 600 mm,寬度一般為1 600~1 800 mm。為更好地推演出危險碰撞區域,取L1= 4.6 m,W1= 1.8 m,L2= 4.6 m,W2= 1.8 m。得到關于v1、v2和X1的危險邊界模型,X1的危險碰撞范圍式(5),其中X1d為X1的危險碰撞范圍,X1,min和X1,max分別為X1的最小值和最大值,

用MATLAB軟件表示該危險邊界模型所圍成的危險區域,如圖4所示。
圖4中上曲面為X1,max的函數圖,下曲面為X1,min的函數圖。兩曲面之間構成的區域為碰撞危險區域,上下兩曲面分別為危險區域的上下邊界。如果在某一個場景下,兩乘用車的速度與距離的組合在這個區域內,則表明該場景是危險場景,在這種情況下可能會發生碰撞。
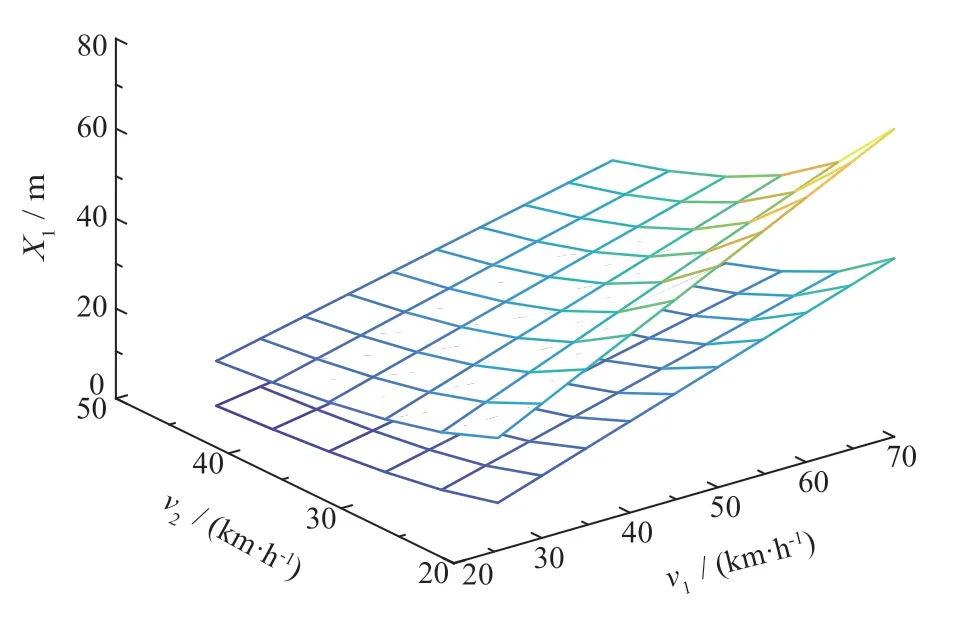
圖4 危險區域
在第2類場景中,分別統計2種情況下乘用車的速度。如圖5所示,乘用車2在進口1進行左轉,此時乘用車1的速度范圍為25~70 km/h,乘用車2的速度范圍為20~45 km/h。當乘用車2在進口3左轉時,乘用車1的速度范圍為15~70 km/h,乘用車2的速度范圍為10~45 km/h。組合得到兩乘用車速度范圍下的速度-距離危險區域模型。兩曲面之間構成的區域即為兩乘用車在該種運動方式下的危險碰撞區域。

圖5 乘用車在丁字路口危險碰撞范圍
2.2 丁字路口商用車與兩輪車危險場景推演
根據本文聚類出的第3類危險場景,研究在無交通信號控制的情況下(不考慮無交通沖突的情況),右轉的商用車與直行的兩輪車均勻速,具體的運動方式如圖6所示,對兩車的運動軌跡進行分析,構建基礎的運動學模型。
如圖6所示,商用車與兩輪車運動軌跡的交點為推測碰撞區域的中心點,設兩輪車最前端到推測碰撞區域中心的距離為X2,商用車最前端運動到推測碰撞區域中心的距離為S2,商用車的行駛速度為v3,兩輪車的行駛速度為v4。考慮商用車與兩輪車的外形參數,假設商用車的長為L3,寬為W3,兩輪車的長為L4,寬為W4。
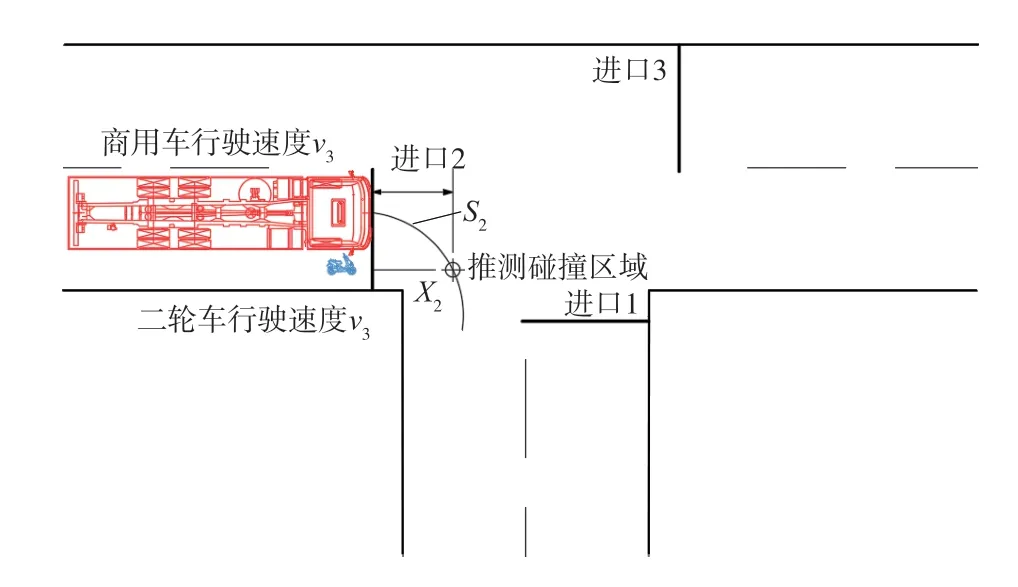
圖6 商用車與兩輪車在丁字路口的運動形態
1) 當兩輪車速度較快,但不足以避開商用車時,兩輪車的尾部會與商用車的頭部發生碰撞,此時建立商用車與兩輪車基于時間的運動學公式(6):

2) 當商用車速度較快,但不足以避開兩輪車時,商用車的尾部會與兩輪車的頭部發生碰撞,此時建立商用車與兩輪車基于時間的運動學公式(7):

根據2.1節獲取轉彎軌跡的方法,得到商用車轉彎時S2的中位數為20.3 m,同時,商用車一般分為客車、貨車和半掛牽引車。不同的類型的商用車尺寸有一定差別,為了概括大部分商用車類型,取商用車長度L3= 21.3 m,寬度為W3= 2.6 m。根據NAIS數據庫統計的兩輪車尺寸,選取兩輪車的長度為L4= 1.9 m,寬度為W4= 0.8 m。得到關于v3、v4和X2的危險邊界模型。X2的危險碰撞范圍如式 (8),

其中:X2d為X2的危險碰撞范圍,X2,min和X2,max分別為X2的最小值和最大值。
根據數據庫事故分類,將事故嚴重程度劃分為輕微事故、一般事故、重大事故和特大事故,篩選該類場景下事故嚴重程度最大的事故,提取商用車與兩輪車在路口轉彎的速度,得到商用車的速度范圍為7~40 km/h,兩輪車的速度范圍為8~20 km/h,組合得到商用車與兩輪車的速度-距離危險區域模型,在MATLAB軟件中將該危險區域模型作圖表示,如圖7所示。
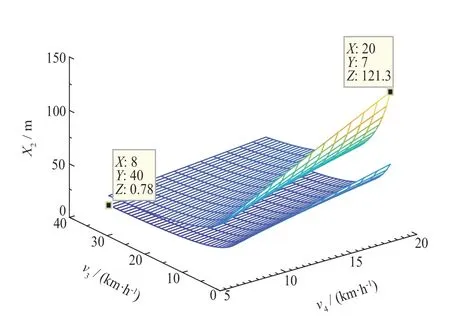
圖7 商用車與兩輪車碰撞危險區域
2.3 丁字路口商用車與商用車危險場景推演
根據聚類得到的第4類場景,研究在無交通信號控制的情況下(不考慮無交通沖突的情況),直行的商用車與右轉的商用車均勻速,根據丁字路口的特性,圖8表示出了商用車在丁字路口直行和右轉的方式,根據兩車的運動軌跡,同上小節方法相同,構建基礎的運動學模型。
如圖8所示:兩商用車運動軌跡的交點為推測碰撞區域的中心點,設商用車1最前端到推測碰撞中心的距離為X3,商用車2最前端運動到推測碰撞區域中心的距離為S3,商用車1的行駛速度為v5,商用車2的行駛速度為v6。考慮兩商用車的外形參數,假設商用車1的長為L5,寬為W5,商用車2的長為L6,寬為W6。

圖8 兩商用車在丁字路口的運動形態
根據2.1節獲取轉彎軌跡的方法,得到商用車2轉彎時S3的中位數為15 m,取商用車長度為L5=L6=21.3 m,寬度為W5=W6= 2.6 m。得到關于v5、v6和X3的危險邊界模型。X3的危險碰撞范圍如式(9),

其中X3d為X3的危險碰撞范圍,X3,min和X3,max分別為X3的最小值和最大值。
篩選商用車直行和右轉典型危險場景下事故嚴重程度最大的事故,統計商用車在路口轉彎時的速度,得到車1的速度范圍為20~75 km/h,車2的速度范圍為10~40 km/h,組合得到兩商用車速度-距離危險區域模型。在MATLAB軟件中將該危險區域模型作圖表示,如圖9所示。
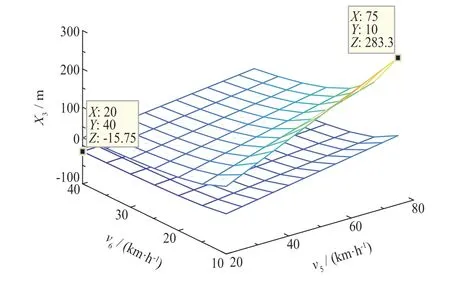
圖9 兩商用車在丁字路口危險碰撞范圍
2.4 討 論
通過對3類丁字路口轉彎場景下的危險碰撞域進行分析,發現在乘用車直行與乘用車左轉和商用車直行與商用車右轉兩類場景下,當直行車輛參與方速度一定時,轉彎車輛參與方速度增加,危險碰撞范圍在減小。這是因為在正常的轉彎速度范圍內,轉彎車輛在通過丁字路口時速度越快,其在轉彎區域內停留的時間就會越短,從而與直行車輛在路口內發生碰撞的幾率就會減小。本文得到的第2類典型場景(乘用車在進口3左轉與乘用車直行)與Euro-NCAP在2019年最新發布的自動緊急制動系統測試規程中引入的十字路口評價測試場景類似。法規中的測試場景如下圖10所示,其中左轉乘用車為測試車(速度為10、15、20 km/h、),直行乘用車為目標車(速度為30、40、55 km/h)[25]。從圖中可以看到,隨著左轉乘用車的速度增加,左轉乘用車在路口處的轉彎半徑增加,左轉乘用車在路口處與直行車沖突的區域減小。
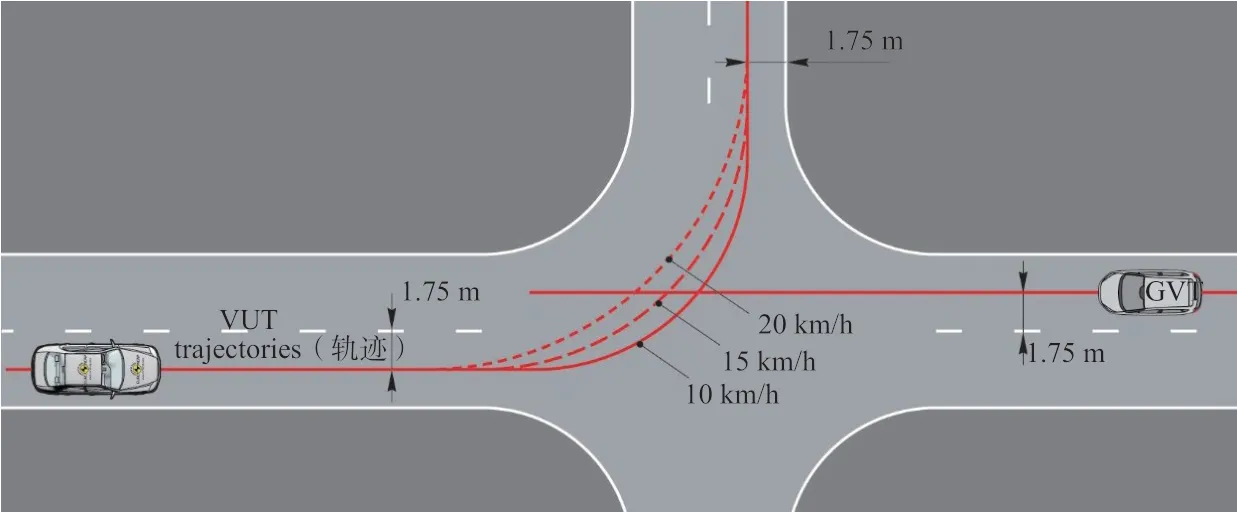
圖10 Euro-NCAP發布的AEB十字路口測試場景
當轉彎車輛參與方速度一定時,直行車輛參與方的速度增加,危險碰撞范圍增加。這是因為當直行車輛速度越快時,駕駛員面對路口內突發情況的反應處理時間越小,事故發生的幾率就會增加。
以上可以為減小2個車輛參與方在丁字路口處的沖突提供一定啟發,在通過丁字路口時,應當重點控制直行車輛的車速,這可以從駕駛員行為和交通管理控制等方面進一步研究。同時,也可以為測試自動緊急制動系統等輔助駕駛安全系統提供參考。
3 結 論
通過對NAIS數據庫中發生在丁字路口的交通事故數據進行篩選、聚類分析,得出了4種在丁字路口的典型危險場景。對其中包含轉彎行駛的第2類、第3類和第4類場景,結合車輛的運動學狀態,構建車輛在丁字路口的運動學模型,建立速度-距離危險模型,推演得到2個參與方在丁字路口不同運動方式下的危險碰撞區域,結論如下:
1) 乘用車與乘用車在丁字路口直行和左轉,當乘用車2在進口1左轉,乘用車1最前端到推測碰撞中心的距離(X1)的危險范圍為1.67~68.45 m。當乘用車2在進口3左轉,X1的危險范圍為-1.20~136.00 m。
2) 商用車在丁字路口處右轉時,當商用車的速度范圍在7.00~40.00 km/h,兩輪車的速度范圍在8.00~20.00 km/h,兩輪車最前端到推測碰撞中心的距離(X2)的危險范圍為0.78~121.30 m。
3) 當兩商用車在丁字路口處發生直行和右轉沖突,直行時的商用車速度范圍為20.00~75.00 km/h,右轉商用車的速度范圍為10.00~40.00 km/h時,商用車1最前端到推測碰撞中心的距離 (X3)的危險范圍為-15.75~283.30 m。
本研究基于特定道路形態丁字路口進行危險場景聚類及推演,可以為中國實際道路交通環境下的輔助駕駛安全系統測試提供參考。但僅針對丁字路口處發生的沖突場景進行了分析推演,其他道路類型的危險沖突場景還有待進一步研究。
參考文獻(References)
[1] 國家統計局. 交通事故年度數據[/OL]. [2020-12-20].https://data.stats. gov.cn/easyquery.htm?cn=C01&zb=A0S0D01&sj=2019.National Bureau of Statistics. Annual traffic accident data [/OL]. [2020-12-20], https://data.stats.gov.cn/easyqu ery.htm?cn= C01&zb=A0S0D01&sj=2019.(in Chinese)
[2] 徐向陽,周兆輝,胡文浩,等. 基于事故數據挖掘的AEB路口測試場景[J/OL]. 北京航空航天大學學報:1-12. [2020-08-21], https://doi.org/10.13700/j.bh.1001-5965.2019.0548.
XU Xiangyang, ZHOU Zhaohui, HU Wenhao, et al. AEB intersection test scenario based on accident data mining[J/OL].J Beijing Univ Aero Astro: 1-12. [2020-08-21],https://doi.org/10.13700 /j.bh.1001-5965.2019.0548. (in Chinese)
[3] 公安部交通管理局. 中華人民共和國道路交通事故數據統計年報[M]. 無錫:公安部交通管理科學研究所,2018:48-49.
Traffic Administration of the Ministry of Public Security.The People’s Republic of China Road Traffic Accident Data Statistics Annual Report [M]. Wuxi: Traffic Management Research Institute of the Ministry of Public Security,2018: 48-49. (in Chinese)
[4] 胡林, 易平, 黃晶, 等. 基于真實事故案例的自動緊急制動系統兩輪車測試場景研究[J]. 汽車工程,2018,40(12):1435-1446+1453.
HU Lin, YI Ping, HUANG Jing, et al. Research on automatic emergency braking system two-wheeled vehicle test scenario based on real accident cases [J].Autom Engi,2018, 40(12): 1435-1446+1453. (in Chinese)
[5] 范天賜, 王宏雁, 楊震, 等. 基于中國兩輪車事故的典型場景提取與分析[J]. 交通與運輸, 2019, 35(2): 41-45.
FAN Tianci, WANG Hongyan, YANG Zhen, et al.Extraction and analysis of typical scenes based on twowheeler accidents in China [J].Traff Transport, 2019,35(2): 41-45. (in Chinese)
[6] Sui B,Lubbe N,Bargman J. A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data [J].Accid Anal Prev,2019, 132(1):1-12.
[7] 毛攀. 汽車與兩輪車碰撞事故場景分析及AEB避撞研究[D]. 成都:西華大學, 2020.
MAO Pan. Scene analysis of car-two-wheeler collision accident and AEB collision avoidance research [D].Chendu: Xihua University, 2020. (in Chinese)
[8] 侯彥巧. 基于典型場景的自動緊急制動系統對騎車人保護效果研究[D]. 成都:西華大學, 2020.
HOU Yanqiao. Research on the protection effect of automatic emergency braking system on cyclists based on typical scenarios [D]. Chendu: Xihua University, 2020.
[9] HUANG Sunan, YANG Jikuang, Eklud F. Evaluation of remote pedestrian sensor system based on the analysis of car-pedestrian accident scenarios [J].Safe Sci, 2007,46(9): 1345-1355.
[10] Good D, Abrahams R. Vehicle speeds for pedestrian precrash system test scenarios based on us data [C]//2014 IEEE17thInt’l Conf Intel Transport Syst (ITSC),2014.Qingdao, China.
[11] 周華, 張巧玉, 母堯堯, 等. 十字路口乘用車與兩輪車典型危險場景聚類及推演[J]. 中國安全科學學報, 2020,30(4): 100-107.
ZHOU Hua, ZHANG Qiaoyu, MU Yaoyao, et al.Clustering and deduction of typical dangerous scenes for passenger cars and two-wheeled vehicles at intersections[J].Chin Safe Sci J, 2020, 30(4): 100-107. (in Chinese)
[12] 蘇江平, 陳君毅, 王宏雁, 等. 基于中國危險工況的行人交通沖突典型場景提取與分析[J]. 交通與運輸(學術版) ,2017(1): 209-214.
SU Jiangping, CHEN Junyi, WANG Hongyan, et al.Extraction and analysis of typical scenes of pedestrian traffic conflicts based on dangerous conditions in China [J].Traf Transport (Acad Ed), 2017(1): 209-214. (in Chinses)
[13] 吳斌, 朱西產, 沈劍平, 等. 基于自然駕駛研究的直行追尾危險場景誘導因素分析[J]. 同濟大學學報 (自然科學版) , 2018, 46(9): 1253-1260.
WU Bin, ZHU Xichan, SHEN Jianping, et al. Analysis of inducing factors in a straight-forward rear-end collision scene based on natural driving research [J].J Tongji Univ(Nat Sci Ed), 2018, 46(9): 1253-1260. (in Chinese)
[14] 李霖, 朱西產, 劉穎, 等. 涉及騎車人的典型交通危險場景[J]. 同濟大學學報(自然科學版), 2014, 42(7): 1082-1087.
LI Lin, ZHU Xichan, LIU Ying, et al. Typical traffic danger scenes involving cyclists [J].J Tongji Univ (Nat Sci Ed), 2014, 42(7): 1082-1087. (in Chinese)
[15] 夏瀾, 朱西產, 馬志雄. 切入型危險工況下自動緊急制動系統的測試場景[C]//第14屆國際汽車交通安全論壇論文集,汽車車身先進設計制造國家重點實驗室, 湖南大學, 2017: 142-155.
XIA Lan, ZHU Xichan, MA Zhixiong. Test scenario of automatic emergency braking system under cut-in dangerous conditions [C]//Infats Proceed 14th Int’l Forum Autom Traff Safe, State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, 2017: 142-155.
[16] 郭景華, 李克強, 王進, 等. 基于危險場景聚類分析的前車隨機運動狀態預測研究[J]. 汽車工程, 2020, 42(7):847-853+859.
GUO Jinghua, LI Keqiang, WANG Jin, et al. Prediction of the random motion state of the preceding vehicle based on cluster analysis of dangerous scenes [J].Autom Engi,2020, 42(7): 847-853+859. (in Chinese)
[17] 劉穎, 賀錦鵬, 劉衛國, 等. 自動緊急制動系統行人測試場景的研究[J]. 汽車技術, 2014(3): 35-39.
LIU Ying, HE Jinpeng, LIU Weiguo, et al. Research on pedestrian test scenarios of automatic emergency braking system [J].Autom Tech, 2014(3): 35-39. (in Chinese)
[18] Bagschik G,Menzel T,maurer M. Ontology based scene creation for the development of automated vehicles [C]//2018 IEEE Intel Vehic Symp (IV),Jiangsu,2018: 1813-1820.
[19] Rocklage E,Kraft H, Karatas A, et al. Automated Scenario Generation for Regression Testing of Autonomous vehicles [C]//IEEE. 2017 IEEE 20th Int’l Conf Intel Transport Syst (ITSC). New York: IEEE, 2017:476-483.
[20] Fellner A, Krenn W, Schlick R, et al. Model-based mutation-driven test case generation via heuristic--guided branching search [J].ACM Trans Embe Comput Syst,2019, 18(1): 1-28.
[21] 左國新. 數據分析實驗教程[M]. 武漢:華中師范大學出版社,2015: 70-77.
ZUO Guoxin. Experimental Course of Data Analysis [M].Wuhan: Huazhong Normal Unive Press, 2015: 70-77. (in Chinese)
[22] 何曉群. 多元統計分析(第4版) [M] 北京:中國人民大學出版社,2015: 52-57.
HE Xiaoqun, Multivariate Statistical Analysis (4 Edit)[M]. Beijing: China Renmin Univ Press, 2015: 52-57. (in Chinese)
[23] 百度文庫. 公路等級劃分標準 [R/OL]. (2018-03-01),https://wenku.baidu.com/view/1cd1b3ed30126edb6f1aff00 bed5b9f3f80f72e9.html.
Baidu Library. Highway classification standards [R/OL].(2018-03-01), https://wenku.baidu.com/view/1cd1b3ed301 26edb6f1aff00bed5b9f3f80f72e9.html. (in Chinese)
[24] Han I. Scenario establishment and characteristic analysis of intersection collision accidents for advanced driver assistance systems [J].Traf Inju Prevent, 2020, 21(6): 1-5.
[25] Euro-NCAP. TEST PROTOCOL-AEB Car-to-Car systems[EB/OL]. (2020-04-00),https://www.euroncap.com/en/for-engineers/protocols/safety-assist/.