GNSS/SINS組合導航系統在衛星遮擋場景下的定位性能分析
2021-10-15 04:06:40李彩玲高雅萍李春花
無線電工程 2021年10期
李彩玲,高雅萍,李春花,江 玲
(1.成都理工大學 地球科學學院,四川 成都 610059;2.中國科學院 重慶綠色智能技術研究院,重慶 400045;3.重慶大學 土木工程學院,重慶 400045)
0 引言
近年來,隨著自動駕駛技術的快速發展,車載組合導航系統的應用更為廣泛[1]。全球導航衛星系統(Global Navigation Satellite System,GNSS)/捷聯慣性導航系統(Strapdown Inertial Navigation System,SINS)組合導航是目前車載常用的定位方式。GNSS能夠提供高精度的絕對位置信息,但其易受環境影響,且動態性能滯后,更新率低[2]。SINS具有短時精度高、動態性能好、更新率高、不受環境影響等優點[3],但隨時間增長,其誤差不斷累積,長時間難以獨立工作[4]。根據二者的優缺點,GNSS和SINS具有良好的互補性,GNSS/SINS組合導航系統非常適合應用于車載定位。
然而在復雜城市環境中,城市峽谷、林蔭小道、隧道等應用場景對衛星信號具有一定影響,使得GNSS/SINS組合導航系統無法正常工作。文獻[5]探討了在復雜城市環境下GNSS/INS組合導航可觀測度分析;文獻[6-8]分別對丟失短時和長時衛星信號的組合導航系統定位性能展開分析;文獻[9]對不同載體在丟失相同衛星信號的定位性能和可觀測度進行探討。上述文獻主要針對不同載體和可觀性等方面對組合導航系統定位性能展開分析,未考慮不同機動狀態對載體定位性能的影響。本文在不同機動狀態下,對低成本GNSS/SINS組合導航系統在丟失短時和長時信號后的定位性能展開詳細分析,并對滿足車載定位精度允許丟失信號時長的閾值進行探討。
1 GNSS/SINS組合導航系統模型
GNSS/SINS組合導航融合算法眾多,本文選取基于擴展卡爾曼濾波(EKF)的GNSS/SINS松組合導航。松組合導航解算主要分為兩步:時間更新與量測更新。在時間更新階段,利于慣性測量單元(IMU)測量的比力和角速度值對姿態、速度和位置進行計算;在量測更新階段,利用GNSS測量的位置、速度信息進行濾波融合,并將求解的誤差改正數對SINS進行反饋矯正,以此來約束SINS隨時間增長的誤差累積,得到松組合導航輸出結果[10]。松組合流程圖如圖1所示。

圖1 GNSS/SINS松組合流程Fig.1 Flow chart of GNSS/SINS loose couple
1.1 SINS運動參數方程
SINS通過IMU所測得的角速率和比力來確定載體的運動參數,以下為姿態、速度和位置的運動方程[11]:
(1)
(2)
(3)

1.2 GNSS/SINS組合導航模型
GNSS/SINS組合導航模型由慣導狀態更新量和GNSS測得的速度、位置信息分別作為系統狀態方程和量測方程基礎。該系統由15維向量組成,即:
(4)
式中,φ=[γθψ]Τ,γ,θ,ψ分別為橫滾角、俯仰角和航向角;νn=[νNνEνD]Τ為NED方向的速度;Ρn=[pNpEpD]Τ表示NED方向的位置;陀螺儀零偏ε=[εxεyεz]Τ;加速度計常值零偏=[xyz]Τ。由于普通車載動態性能較差,慣性傳感器的比例因子誤差相對于其零偏為次要誤差項,因此只考慮傳感器零偏誤差[9]。
由式(1)~式(3)構成函數矢量,對其連續方程進行離散化,可進一步得到直接估計的狀態方程和量測方程:
(5)
式中,Xk,Xk-1分別為k-1,k時刻系統的狀態向量;Φk,k-1為k-1~k時刻的系統狀態轉移矩陣;Γk-1為k-1時刻的系統噪聲驅動矩陣;Wk-1為k-1時刻的系統噪聲向量;Zk為k時刻的量測向量;Ηk為k時刻的量測矩陣;Vk為k時刻的量測噪聲向量。
2 實驗分析
本次實驗車載設備主要包括UBLOX-M8L單頻定位芯片、高精度螺旋天線、功分器及相關存儲設備。以UBLOX-F9R雙頻定位板卡作為基準站進行數據采集。車載實驗場地為中國科學院大學重慶學院新校區,測試路線全程為開闊無遮擋場景,實驗時長18 min。以M8L板卡單點GNSS/SINS融合定位結果作為對比實驗數據。本次實驗以F9R基站與M8L進行載波相位差分(Real-time kinematic,RTK)定位解算結果作為參考值,以定位誤差和均方根誤差值作為組合導航系統定位精度評定因子,二者均能較好地反映組合導航系統的定位性能[13]。圖2為基站安裝示意圖,圖3為車載定位設備安裝示意圖。

圖2 基站安裝示意Fig.2 Schematic diagram of base station installation

圖3 車載定位設備安裝示意Fig.3 Schematic diagram of installation of vehicle positioning equipment
本次實驗在轉彎和直線行駛2種不同機動狀態下,分別模擬了丟失不同時長衛星信號實驗。設置2組信號丟失實驗:短時衛星信號丟失(2,5和10 s)和長時衛星信號丟失(15,30和40 s)。圖4為未丟失衛星信號組合導航結果與參考值軌跡圖,以及模擬信號丟失實驗位置圖。

圖4 軌跡圖與模擬信號丟失實驗段Fig.4 Trajectory diagram and simulated signal loss experimental section
2.1 開闊場景下GNSS/SINS組合導航系統定位性能分析
實驗首先在開闊場景下,對GNSS/SINS組合導航系統進行定位性能分析。圖5、圖6分別為開闊場景下組合導航系統位置估計誤差圖和水平方向速度估計誤差圖。
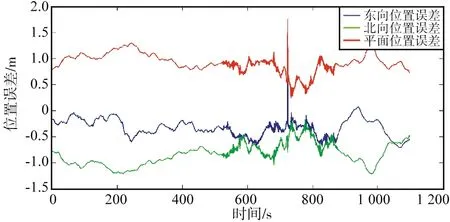
圖5 開闊場景位置估計誤差Fig.5 Error graph of position estimation in open scenarios

圖6 開闊場景水平速度估計誤差Fig.6 Horizontal velocity estimation error graph in open scenarios
由圖5可知,東向位置估計精度整體優于北向,分別保持在1.6,1.5 m以內;平面位置誤差保持在2 m以內。由圖6可知,水平2個方向速度估計精度相當,均保持在0.5 m/s以內。定位誤差統計結果如表1所示。

表1 開闊場景下全時段GNSS/SINS組合導航定位性能分析表Tab.1 Full-time GNSS/SINS integrated navigation and positioning performance analysis table in open scenarios
由表1可知,在開闊場景下,GNSS/SINS組合導航系統平面位置精度可達亞米級,滿足車載場景基本定位需求。由位置誤差均值分析可知,東向位置估計精度整體優于北向。從位置誤差最大值分析可知,北向局部位置估計精度略優于東向,二者位置估計誤差最大值分別為1.214 7,1.562 3 m,;水平2個方向速度估計精度較好,均保持在0.5 m/s以內。
2.2 衛星遮擋場景下組合導航系統定位性能分析
在上述實驗的基礎上,分別模擬在轉彎和直線行駛2種不同機動狀態下,丟失不同時長衛星信號實驗,并計算各時段純慣導推算全局和局部位置誤差統計值,以此來評估慣導性能[8,14-15],模擬試驗段車載系統均保持勻速運動。當衛星信號丟失后,GNSS/SINS組合導航系統將從在線估計與補償的定位模式轉變為純慣導更新模式。由于慣導具有誤差隨時間累積特性,所以組合導航系統的定位精度將隨時間迅速發散,而發散速度也將反映丟失不同時長衛星信號對組合導航系統定位精度的影響[9]。
分別模擬2組衛星信號丟失實驗:場景一為轉彎行駛;場景二為直線行駛。根據相關文獻可知,短時衛星信號丟失實驗模擬了在城市環境中,林蔭小道和短隧道場景;長時衛星信號丟失實驗模擬地下車庫及中長隧道場景。而丟失不同時長衛星信號對全局和局部定位精度有一定影響,根據文獻[8]提出的緩沖時間,對組合導航結果與參考值誤差分析可知,組合導航系統在經歷了相應的緩沖時間后可恢復至平穩。全局誤差和局部誤差分別反映了組合導航系統整體定位性能和在不同場景下的定位精度,因此可通過求解全局與局部誤差統計值對組合導航系統進行定位性能分析。表2為模擬實驗丟失信號起止時段和局部誤差統計時段表。模擬實驗路段如圖4所示。

表2 信號丟失起止時間段和緩沖時間段Tab.2 Signal loss start and end time period and buffer time period 單位:s
2.2.1 在轉彎場景下定位性能分析
該實驗在開闊場景實驗數據基礎上人為抹去不同時長GNSS衛星信號。在設置2組丟失對比實驗基礎上,又細分3組不同時長信號丟失實驗。直線行駛實驗設置同理。圖7、圖8分別為在轉彎狀態下短時和長時信號丟失位置誤差對比圖和速度誤差對比圖。

(a) 短時信號丟失東向位置誤差

(b) 短時信號丟失北向位置誤差

(c) 長時信號丟失東向位置誤差

(d) 長時信號丟失北向位置誤差圖7 轉彎狀態下位置誤差對比Fig.7 Comparison of position errors in the turning state

(a) 短時信號丟失東向速度誤差

(b) 短時信號丟失北向速度誤差

(c) 長時信號丟失東向速度誤差

(d) 長時信號丟失北向速度誤差圖8 轉彎狀態下速度誤差對比Fig.8 Speed error comparison in the turning state
圖7(a)、圖7(b)分別為在轉彎狀態下,短時信號丟失東向和北向位置誤差圖,圖7(c)、圖7(d)分別為長時信號丟失東向、北向位置誤差圖。圖8同理,為2組實驗在東向和北向的速度誤差圖。由位置誤差圖可知,在轉彎狀態下丟失衛星信號,北向局部位置估計精度優于東向。在短時信號丟失實驗中,當丟失信號時長小于5 s時,局部東向和北向位置誤差均小于1 m;當丟失信號時長達到10 s后,東向位置誤差迅速發散至2.5 m,北向位置誤差仍保持在1 m以內。在長時信號丟失實驗中,2個方向的位置誤差與丟失信號時長呈正相關。當丟失信號時長達到30 s時,北向局部位置估計精度仍保持在1 m以內;當丟失時長達到40 s時,北向位置誤差迅速發散至4 m。
由圖8可知,在短時信號丟失實驗組中,東向和北向的速度估計精度較好,均保持在0.5 m/s內;當丟失時長逐漸增大后,2個方向的速度估計誤差迅速發散,但北向局部速度估計精度優于東向。當丟失時長小于30 s時,北向速度估計仍能保持一個較好的精度。表3為在轉彎狀態下組合導航系統位置精度分析表。
由表3可知,在轉彎狀態下,北向局部位置估計精度優于東向。對于組合導航系統整體定位精度而言,當丟失時長小于15 s,仍能保持亞米級的定位精度;當丟失信號時長大于15 s且小于40 s時,組合導航系統只能滿足基本的定位需求。若想保持較高的局部定位精度,則允許丟失信號時長閾值為5 s。為了更直觀反映隨丟失信號時長逐漸增加,組合導航全局和局部平面位置精度變化,其隨中斷時長的平面位置RMS值變化如圖9所示。圖10為轉彎狀態下丟失不同信號時長軌跡圖。分析可知,當丟失信號時長小于5 s時,組合導航系統仍能保持一個較高的定位精度;當丟失信號時長小于30 s時,能滿足基本的車載定位需求。隨著丟失信號時長的增加,平面位置誤差和誤差發散速度也逐漸增大。

圖9 轉彎場景平面位置精度變化圖Fig.9 Change graph of plane position accuracy in the turning scenarios

(a) 短時信號丟失局部軌跡圖

(b) 長時信號丟失局部軌跡圖圖10 轉彎場景下丟失不同信號時長軌跡Fig.10 Trajectory graph of loss of different signal durations in the turning scenarios
2.2.2 在直線行駛場景下定位性能分析
場景二仍然是在開闊實驗場景基礎上人為抹去不同時長衛星信號。圖11、圖12分別為在直線行駛狀態下短時和長時信號丟失位置誤差對比圖和速度誤差對比圖。
由圖11分析可知,在直線行駛狀態下,東向局部位置估計精度優于北向。在短時信號丟失實驗中,東向位置估計誤差均保持在1 m以內;當丟失信號時長小于5 s時,北向位置誤差保持在2 m以內,當丟失時長達到10 s后,北向位置誤差迅速發散至6.9 m。在長時信號丟失實驗中,東向位置誤差均保持在8 m以內;北向位置誤差隨丟失信號時長增加而迅速發散;當丟失時長達到40 s后,北向位置誤差最大可達110 m。表4為在直線行駛狀態下組合導航系統位置精度分析表。

(a) 短時信號丟失東向位置誤差

(b) 短時信號丟失北向位置誤差

(c) 長時信號丟失東向位置誤差
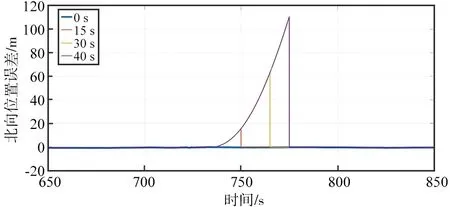
(d) 長時信號丟失北向位置誤差圖11 直線行駛狀態下位置誤差對比Fig.11 Comparison of position errors in a straight-line driving state
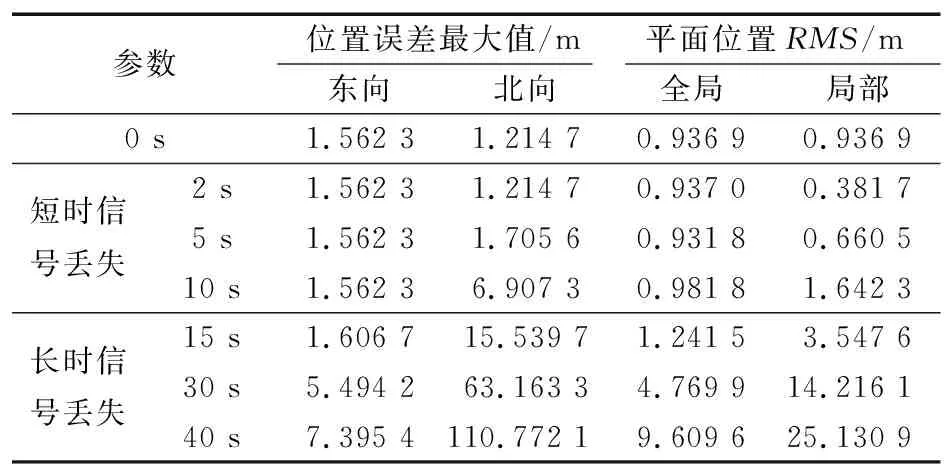
表4 直線行駛狀態下組合導航系統位置精度分析表Tab.4 The position accuracy analysis table of the integrated navigation system in the straight-line driving state
由圖12可知,在2組實驗中,東向速度估計精度整體優于北向,前者均保持在0.5 m/s以內。從短時信號丟失實驗組分析可知,當丟失信號時長小于5 s時,東向和北向速度估計誤差分別保持在0.5 m/s和1 m/s以內;當丟失信號時長達到10 s時,北向速度誤差發散至1.3 m/s。在長時信號丟失實驗中,北向速度誤差隨丟失信號時長增大而增大,當丟失信號時長達到40 s時,北向速度誤差最大達到5.4 m/s。

(a) 短時信號丟失東向速度誤差
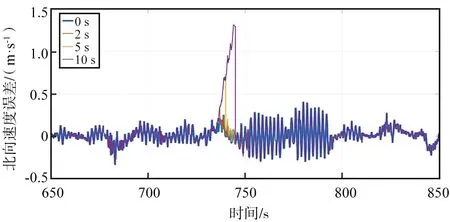
(b) 短時信號丟失北向速度誤差

(c) 長時信號丟失東向速度誤差
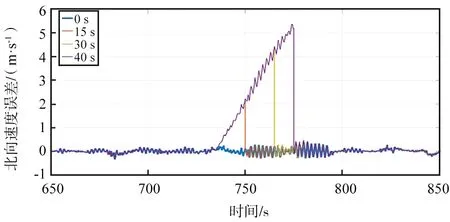
(d) 長時信號丟失北向速度誤差圖12 直線行駛狀態下速度誤差對比Fig.12 Comparison of speed errors in straight-line driving state
由表4可知,在直線行駛狀態下,當丟失衛星信號時長大于5 s時,東向位置估計精度優于北向。短時信號丟失對全局定位精度影響較小,仍能保持亞米級的定位精度;當丟失信號時長小于5 s時,局部位置估計仍能保持較好的定位精度。從長時信號丟失分析可知,當丟失信號時長小于30 s時,組合導航系統只能滿足基本的定位需求。圖13為直線行駛狀態下全局與局部平面位置RMS變化圖。圖14為在直線行駛狀態下丟失信號局部軌跡圖。

圖13 直線行駛平面位置精度變化圖Fig.13 Change graph of plane position accuracy in straight-line driving state
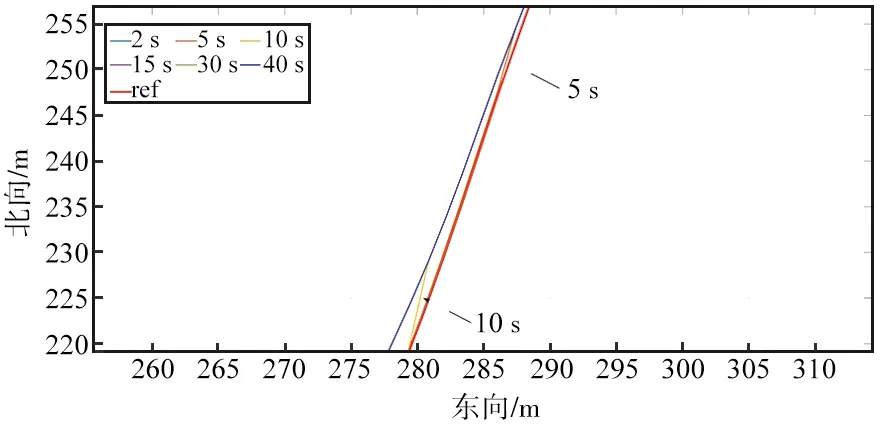
(a) 短時信號丟失局部軌跡圖

(b) 長時信號丟失局部軌跡圖圖14 直線行駛狀態下丟失不同時長信號軌跡Fig.14 Trajectory graph of loss of different signal durations in a straight-line driving state
2.3 不同機動狀態在衛星遮擋場景下的對比分析
由上述2組模擬實驗可知,在衛星遮擋場景下,當丟失信號時長不同時,不同機動狀態的組合導航系統定位也有所差異。表5為不同機動狀態下平面位置誤差最大值對比表,圖15為在衛星遮擋場景下平面位置誤差對比圖。

表5 平面位置誤差最大值對比表Tab.5 Comparison of maximum plane position errors

圖15 衛星遮擋場景下平面位置誤差對比圖Fig.15 Comparison of plane position errors in satellite occlusion scenarios
由表1、表5和圖15分析可知,與未丟失衛星信號組合導航系統相比,當丟失信號時長小于5 s時,2種不同機動狀態對系統的定位性能影響較小,且都能保持亞米級的定位精度。當丟失時長大于5 s后,2種不同機動狀態導航系統的定位性能有明顯差異。當丟失相同時長信號時,場景一最大平面位置誤差小于場景二。隨著丟失信號時長逐漸增加,場景二的平面位置誤差發散速度大于場景一。這是因為在轉彎過程中,載體水平方向動態性能豐富,使得載體姿態誤差、陀螺零偏和加計零偏可觀測,有助于加快濾波狀態量的收斂速度;而在直線勻速運動過程中,航向角變化較小,水平方向無約束,對姿態角誤差等相關狀態量的可觀測性沒有貢獻[9,16-19],因此在轉彎狀態下組合導航系統定位性能優于直線行駛。
3 結束語
本文對低成本GNSS/SINS組合導航系統在不同機動狀態下的定位性能進行定量分析。由上述實驗可知,在開闊場景下,低成本GNSS/SINS組合導航系統能提供亞米級的定位精度,滿足車載定位基本需求。隨后在轉彎和直線行駛2種不同機動狀態下人為抹去不同時長衛星信號。在轉彎場景下,當丟失時長小于15 s時,組合導航系統整體能保持亞米級的定位精度。在直線行駛場景下,丟失信號時長小于10 s時,組合導航系統也能提供亞米級的定位精度。若想局部定位精度仍能達到亞米級,2種不同機動狀態允許丟失信號時長閾值均為5 s。隨后對比分析2種不同機動狀態在丟失相同時長信號的定位精度。當丟失信號時長小于5 s時,二者精度相當;隨著丟失信號時長的增加,轉彎狀態下的組合導航系統定位精度優于直線行駛。
面對復雜城市環境,衛星信號的丟失會極大降低組合導航系統的定位精度,此時需要通過其他傳感器數據來代替GNSS數據,如視覺傳感器和激光雷達;或是建立相應的運動學模型對慣導算法進行改進,進而提高組合導航系統整體定位性能。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00