基于負反饋的電機差速震蕩抑制方法
2021-10-15 04:06:48李佳興孟慶宇
無線電工程 2021年10期
關鍵詞:信號
孫 宇,李佳興,趙 彧,孟慶宇
(1.中國人民解放軍61112部隊,黑龍江 牡丹江 157000;2.黑龍江省林業職業技術學院 信息工程系,黑龍江 牡丹江 157000)
0 引言
在雙馬達驅動系統中,天線俯仰或方位軸上的2臺電機之間經常會出現以軸為節點,大小相等、相位相反和低頻率的阻尼震蕩。會疊加在2臺電機的平均速度上,使電機產生不能自行消除的差速震蕩,因此對于實現對2臺電機在勻速狀態下或加減速狀態下的精準同步控制至關重要。在正常運轉下,電機通過三環進行控制,且控制環路內2臺電機的標稱值相同,因此2臺電機的輸出速度應該一致。然而在電機設計出廠時,即使電機內部件參數相同,在實際應用中電機所表現出來的特性也會略有差別,導致同步控制效果出現差異,因此需通過更精準的控制環路控制電機同步運轉[1]。
目前常用的天線伺服系統所采用的是和速反饋控制方法,由于和速反饋在雙電機之間產生速度差時無法及時進行抑制,特別是在天線上電后快速置位、跟蹤目標時的變速運動和歸零前的反向減速過程中,伺服電機會產生振蕩。因此,需對伺服環路進行優化改進,增加了負反饋的差速抑制電路,將電機產生的速度差經比較器進行差值比較,將差值信號反饋給數值小的速度調節器,從而調節該電機速度,使電流輸入信號趨于相同,達到抑制目的[2]。
1 伺服電機震蕩機理
在基于對天線設備跟蹤任務過程中出現的振蕩特點及雙電機驅動和速反饋速度環引用的基礎上,發現在自跟蹤任務中電機運動時出現的振蕩,與雙電機驅動的速差有關系。通過對伺服電機環路進行測試,在天線高仰角過頂或其他非勻速轉動時會產生幅值波動相對較小、低頻率、低阻尼的諧振頻率。當該諧振頻率與俯仰、方位轉動時的速度頻率相互疊加時,在短時間內無法自動消除,這種特點的頻率疊加狀態稱為差速震蕩[3]。
伺服電機在變速運動的過程中出現振蕩,主要在于主電機轉速增大時,電機帶動的負載力矩增大,從電機速度低于主電機,抑制主電機使其減速;當主電機和從電機速度相同時,從電機的負載力消失。如此反復變速,在S/X自跟蹤、程跟時就會出現振蕩,在控制界面上的引導曲線就會出現上下波動的鋸齒現象。在傳統的天飼饋系統中,通常增加偏置力矩來改善雙電機驅動產生的齒輪消隙,使得雙電機無速度差,減少差速震蕩的發生幾率,但因電機器件的特性差異,優化程度有限[4]。
2 傳統雙電機驅動消息方法
通常在工程上,為了避免伺服電機帶動齒輪產生的差速震蕩,在天線的3個軸體均使用同一廠家、同一型號的寬調速直流伺服電機,同時2臺電機的摩擦離合器、減速箱內部的末級齒輪均與天線主軸的大齒輪匹配嚙合;通過在2臺電機間施加一個偏置電流,從而在同軸的2組減速齒輪組間形成一個偏置力矩,使天線伺服系統在預置、高速過頂或過頂后減、歸零時消除空轉回程,即雙電機驅動消隙。從而避免了因機械結構產生的電機驅動消隙造成天線無法進行準確跟蹤。其原理框圖如圖1所示。
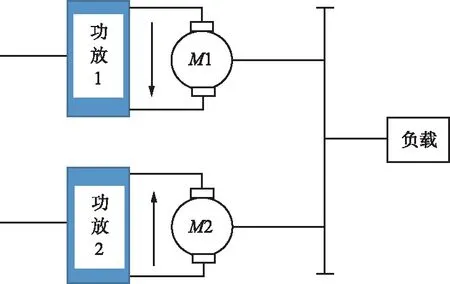
圖1 雙電機消隙原理框圖Fig.1 Block diagram of backlash elimination principle of double motors
2.1 雙電機消隙力矩偏置

圖2 力矩偏置框圖Fig.2 Torque offset block diagram
當Ug=0時,M2=-M1=M0,M0成為消隙(偏置)力矩值。
當Ug由0正向增加不太大時,保持M1,M2反向,仍能消隙,此時由2#電機拖動負載和1#電機前進。
當Ug正向增加到U0時,M1=0,1#電機在齒隙中游移。2#電機仍拖動負載,其齒輪箱不會出現齒隙,負載不會游移。
當Ug>U0時,1#電機穿過齒隙與2#電機共同推動負載,但M2>M1。
當Ug>U1時,偏置力矩開始減小。
要建立相應的管理制度,為人力資源優化配置提供政策依據和導向。深化干部人事制度改革,加快“三能”機制建設,建立干部交流工作制度,暢通企業之間的干部流通渠道。制定各類企業機構編制標準,特別是未來發現方向的分散式新能源、分布式能源的管理模式,安排和實施差異化、結構化、系統化的人力資源優化配置。建立企業內部人才市場,形成有序的員工流動機制。
當Ug>U2時,偏置力矩完全消失,2臺電機以相等的力矩推動負載。
通過對力矩偏置進行分析,天線在反向運轉時,1#電機或2#電機有一臺輸出力矩會提前轉向,使得在一臺末級齒輪脫離大齒輪的同時,另外一臺末級齒輪不脫離,從而避免了天線調頭時,齒隙和空轉回程的產生[5]。
2.2 雙電機消隙的電樞電流
雙電機在實現消隙時通過反饋引入偏置電流,使其與電樞電流疊加,通過電樞電流與負載力矩的正比關系,使主從電機之間產生力矩差,從而使倉體外電機的末級齒輪與主齒輪嚙合,實現消隙。其原理如圖3所示。
圖3在電流調節器的前端增加了消隙控制單元與速度調節器相連,將速度信號轉換成幅值相同、方向相反的電流信號,與電機的反饋信號一同傳輸到電流調節器輸入端,以此來控制電流環的輸入,使2臺電機之間產生力矩差,達到消隙效果。
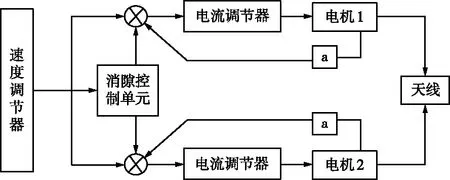
圖3 電樞電流框圖Fig.3 Armature current diagram
2.3 雙電機消隙的不足
雖然上述雙電機驅動能夠達到較好的消隙效果,但因電機內部構件的差異,難免會出現異常情況。
(1) 在天線預置或高速運動過程中,主從電機有一臺電機經過總電樞電流等于零,此時對應力矩為零,末級齒輪與主齒輪之間會產生嚙合間隙,造成齒輪滑動,引起差速振蕩。
(2) 雖然同軸上的2臺電機是同型號、參數值相同的,且元器件特性也相同,但在實際應用中,所發揮出的特性也會略有差別,速度環路所產生的信號不可能完全一致。若偏差太大,則會造成電機差速震蕩,無法消除。
因此,為解決天線伺服在運轉過程中出現上述差速振蕩的問題,需通過差速震蕩抑制的方法來消除設備故障[6]。
3 差速震蕩抑制方法設計
3.1 差速振蕩抑制方案構想
伺服天線中常用的和速反饋抑制方法將2臺電機輸出的速度信號取和后作為速度環的反饋信號,完成速度環閉環,如圖4所示。

圖4 和速反饋控制方法原理框圖Fig.4 Principle block diagram of sum speed feedback control method
由圖4可以看出,2臺測速機輸出的反饋和速度信號與指令速度信號做差后得到速度誤差信號,再經速度調節器校正后同時加到2臺電機的電流環輸入端,同時驅動2臺電機,實現2臺電機轉速同步控制。同時在速度調節器與2個電流環之間設置力矩偏置電路,通過力矩差來消除齒輪消隙。
在電機的運行中存在一定的局限性,主要表現為在電流變化過程中存在偏置電流與驅動電流相抵消的情況,引起差速振蕩[7]。因此在和速反饋的基礎上考慮增加差速反饋比較環路,形成具有差速反饋的反饋方案,解決和速反饋環路易出現的差速震蕩問題。
引入差速反饋抑制差速振蕩能夠抵消振蕩的阻尼力矩。對于速度調節器,為了避免2臺速度調節器器件的差異造成電流調節器輸入幅值不同,而影響速度環的控制。在速度調節器輸出端增加比較器進行輸出信號幅值比較,將比較信號補償到速度調節器輸入端,以彌補器件差異[8],原理框圖如圖5所示。

圖5 負反饋差速震蕩控制方法原理框圖Fig.5 Principle block diagram of negative feedback differential oscillation control method
3.2 差速振蕩抑制電路設計
差速震蕩抑制電路如圖6所示。
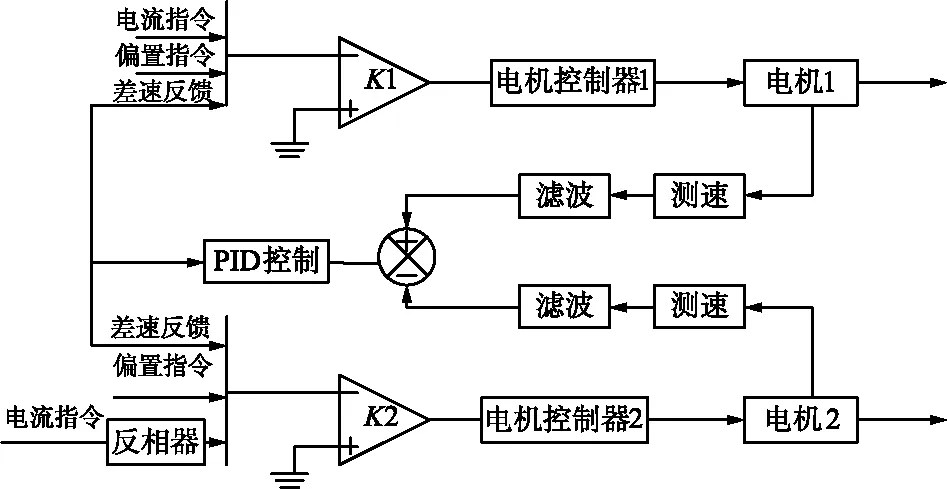
圖6 差速震蕩抑制電路Fig.6 Differential oscillation suppression circuit
本文采用共同速度環的方式對電流的輸出進行指令控制,通過梯形偏置電路實現電消隙,主要是通過對主從電機驅動的偏置指令和差速反饋信號相位值取反實現。此處主要采用電樞反接的方式使實際相位值相反,但同時要注意由于電樞反接,為保證2臺電機同向轉動,對輸出電流指令取反相。
差速反饋通常采用的方式有PI和PID兩種,為了更好地限制超調量,采用PID進行控制,由于系統中存在高頻干擾,不利于控制,所以在PID調節器前引入濾波電路進行濾波。PID調節器原理如圖7所示。

圖7 并聯PID調節器原理Fig.7 Principle of parallel PID regulator
圖7中,N與R1,C1和R2,C0構成了PID控制器,Uc輸出信號直接接入2臺電機各自的電流環輸入端,與電流指令信號和偏置指令信號一起作為電流環的輸入[9]。對該系統增加差速反饋信號輸入如圖8所示。

圖8 差速抑制電路Fig.8 Differential suppression circuit
在雙電機驅動差速抑制的實際電路設計中,應考慮以下2個方面:
(1) 從2臺電機的測速機提取出的差速振蕩信號應是相減的,經過濾波之后從N1輸入;
(2) 采用帶通濾波器和電位器解決測速機之間的非線性和靈敏度不一致問題。
通過以上工作,完成了雙電機驅動差速抑制電路的參數選擇與調試和電路的設計。
3.3 差速振蕩抑制性能仿真
完成對差速負反饋震蕩抑制電路的參數選擇和電路改進后,對和速反饋抑制的速度環階躍響應和引入負反饋、比較器的差速速度環階躍響應進行仿真,如圖9所示。

圖9 差速抑制性能仿真Fig.9 Simulation of differential suppression performance
通過對比可以看出,改進后的速度環階躍響應上升時間較改進前明顯縮短,調整時間寬度較改進前明顯縮短,振動幅度明顯變小。改進后速度環的實時性、穩定性較改進前有所提高。
4 結束語
隨著對雙電機消隙方法的深入研究,齒隙電消隙技術日益成熟,使多電機驅動技術廣泛應用于高精度的天伺饋系統中。然而在常規數據接收任務中,因器件的差異特性及設備運行中出現的特殊情況導致的差速振蕩偶有發生,促使差速震蕩抑制方案不斷改進、抑制電路不斷改進和優化。本文針對原有的差速抑制電路進行改進優化,同時分析了差速震蕩的機理及電消隙方法,通過比對消隙力矩和消隙電流的變化特點進行了深入剖析,指出了和速反饋方法對差速振蕩抑制的不足,在原有和速反饋基礎上保留原偏置電路,提出引入差速負反饋,在速度調節器輸出端增加比較器,用于速度差補償,并仿真驗證了該方案對速度環路性能改進的可行性。
本文研究討論的消隙方法、差速震蕩抑制方案,既有深入的理論剖析,又有仿真實驗,驗證了方案的可行性,對常用的固定式或移動式伺服設備優化改進具有一定的參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06