一種仿生偏振航向測量系統設計與測試
2021-10-17 23:52:18李磊磊張旭升陳家斌劉星橋
中國慣性技術學報 2021年3期
李磊磊,梁 琳,張旭升,陳家斌,劉星橋
(1. 北京理工大學 自動化學院,北京 100081;2. 北京理工大學 光電學院,北京 100081)
經過億萬年進化,沙蟻、蜜蜂、蟋蟀等昆蟲形成了自己特有的導航方式,即利用天空偏振信息實現導航[1]。這些昆蟲通過自身偏振視覺系統感測天空偏振信息,解算出身體軸線相對于太陽子午線的方位信息,結合行進的步長或飛行的距離,完成航跡推算,實現自主導航。通過這種導航方式,沙蟻可以到距離巢穴數百米的地方進行覓食后,幾乎沿直線返回巢穴[2];蜜蜂可以采集 200 萬朵花兒的粉,來回飛翔4.5×105 km,卻從不會迷路。偏振光導航是自然界中生物體常用的導航方式之一,偏振光導航作為一種新型的導航技術,引起了國內外科研人員的廣泛關注。
多年來國內外有不少學者分析了生物偏振敏感導航機理,并利用昆蟲解剖學、電生理學、仿生學方面的研究成果,設計了仿生偏振導航傳感器模型,初步證實了仿生偏振導航的可行性。1999 年,瑞士蘇黎世大學T. Labhart 利用光電元件制備了一個偏振敏感神經元模型[3]。2000 年,Lambrinos 等人將沙蟻導航策略應用到移動機器人的自主導航上來,設計了一種六通道的偏光導航傳感器[4]。褚金奎課題組在Lambrinos 等人研究基礎上做了進一步改進,研制了一種并發式六通道正交偏振導航傳感器,并提出了一種偏振光及紅外傳感器輔助慣導定姿方法[5]。Tang 等提出了一種適應惡劣環境的脈沖耦合神經網絡偏振光定向方法[6]。Chen 等提出了基于相機的偏振導航傳感器的設計和校準方法[7]。Wang 等利用全天域的偏振信息,通過優化偏振光E 矢量與太陽方向矢量的投影殘差而實現定向[8]。Zhang 等利用偏振信息,通過對稱誤差最小化來擬合太陽子午線,并進行定向[9]。Zhao 等研究了不同天氣條件下的偏振光模式并基于偏振角的對稱性提出一種新的導航方法[10]。Fan 等研究了基于多攝像機偏振視覺的天空偏振模式的定向問題[11]。昆士蘭大學研究人員利用水下的偏振模式完成了地理定位[12]。法國學者Julien 等研制了敏感紫外波段的偏振光量傳感器估計運動方向[13]。范晨等提出了一種基于微慣性/偏振視覺的組合定向方法,并增強了偏振視覺定向的動態適應性[14]。
上述偏振光傳感器獲取偏振信息分為兩種方式:一種是圖像式,一種是點源式。圖像式傳感器需要圖像芯片,成本較高。本文主要針對點源式偏振傳感器開展研究。現有點源式傳感器是基于分波面探測原理,方法簡單,簡便易行,但在實現中也存在一些不足。首先,光能利用率不高,大量入射光波成為雜散光影響探測效果。其次,分塊拼接的線偏振片會影響傳感器的精度。此外,套筒結構將不利于消除雜光。針對以上不足,本文提出了采用基于偏光調制原理的偏振光航向測量方法。該方法采用共光路式的設計,有助于部分消除因元器件誤差等造成的系統誤差,并使測量系統具有同一視場,提高檢測精度。另外,采用小孔光闌加望遠鏡結構取代套筒,可有效避免雜散光干擾,提高傳感精度。
1 天空偏振模式
當日光照向地球時,會在大氣層形成散射,主要的散射形式有瑞利(Rayleigh)散射和米氏(Mie)散射。大氣主要成分為分子和氣溶膠微粒。當大氣中粒子的直徑比波長小得多時發生的散射為Rayleigh 散射。這種散射主要由大氣中的原子和分子,如氮、二氧化碳,臭氧和氧分子等引起。Mie 散射是由于大氣中粒子的直徑與輻射光的波長基本相當時發生的散射。Mie 散射的角度分布與散射強度的關系十分復雜,粒子相對于波長的尺度越大,分布越復雜。這種散射主要由大氣中的微粒,如煙、小水滴、塵埃及氣溶膠等引起。大氣中主要成分為氮氣和氧氣,合計約占到99%,因此日光在大氣層主要發生Rayleigh 散射。
Rayleigh 散射特點是波長的四次方( λ4)與散射強度成反比,I∝1/ λ4,即波長越短,散射光強度越大。當向四面八方的散射光越弱時,原來傳播方向上的透過率便越強。設散射粒子的光學折射率為n,形狀為球形,其半徑為α 。又設散射粒子與觀察點的距離為r,入射光為線偏振光且波長為λ,入射光強為 I0,則單個球形小粒子的散射光強表示為:

式中φ 為觀測方向與入射光電矢量的夾角,即散射方位角;θ 為散射角。
當入射光為自然光時,單個分子的散射光強表示為:

垂直于散射面的散射光強分量和平行于散射面的散射光強分量分別表示為:
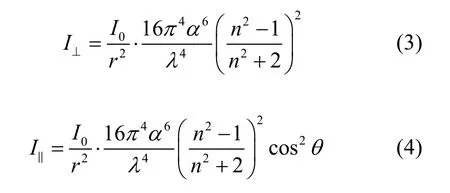
Rayleigh 粒子散射模型如圖1 所示,入射到Rayleigh 粒子上的光激發的散射電場分別為互相平行,不隨θ 角變化,散射角θ 定義為觀測方向與入射光的夾角。之間有一個角度,所以成正比。
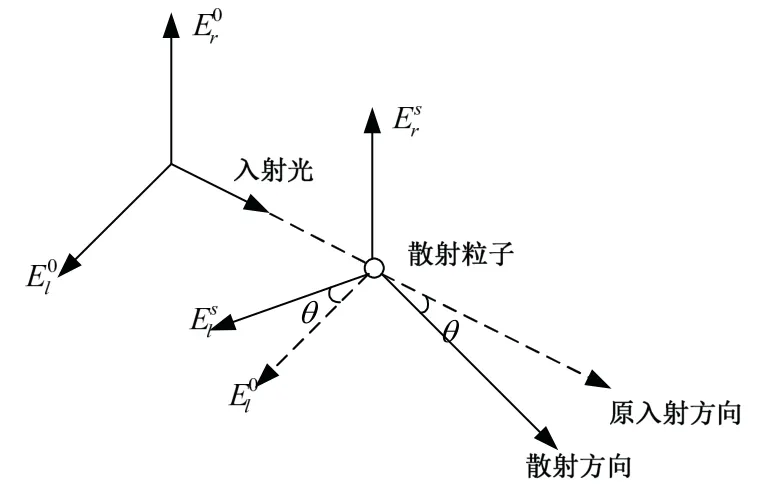
圖1 Rayleigh 粒子散射模型Fig.1 Rayleigh Particle scattering model
對于自然光或其它入射光,散射光的兩個偏振分量不一定相等,即散射過程改變了光的偏振狀態,用偏振度可以定量描述光的偏振態。對于Rayleigh 粒子散射而言,在入射光為自然光的條件下偏振度為:

研究天空偏振模型圖采用地平坐標系。在地平坐標系中,觀測者所在的地平面無限擴展與天球相交的大圓成為地平圈,通過天頂和天底的無數個與地平圈相垂直的大圓為地平經圈,而與地平圈平行的小圓成為地平緯圈。在地平坐標系中用方位角和高度角表示天體的位置。太陽方位角,就是通過天體的地平經圈與午圈之間的夾角,以午圈(正南方)為起算點,由南向東向北為負,由南向西向北為正,如太陽在正東方,方位角為-90 °,在正北方時為±180 °。
圖2 所示的地平坐標系中,S 表示太陽,OP 表示天空中觀測的方向,Z 表示天頂,α 為觀測方向OP和太陽方向OS 夾角。由Rayleigh 散射理論知,待測光束的E-矢量振動方向垂直于太陽S、地面觀察點O和觀察方向OP 所構成的平面。偏振方位角φ 定義為P 點E 矢量振動方向與過P 點子午線(弧ZP)的夾角。
圖2 天空P 點偏振方位角圖Fig.2 Framework of sky point P polarization azimuth
2 偏光調制航向測量系統設計
2.1 偏光調制測量原理
光波是橫波,沿z 軸傳播的光波在空間某一點可以分解成彼此正交的兩個分量,可以表示為:

其中, E0x、 E0y為振幅,ω 角頻率,δx,δy為相位。則相位差 δ= δy- δx。
1852 年George Gabriel Stokes 提出光波的強度和偏振態可以由四個參量來描述,即斯托克斯參量S =[S0S1S2S3]T,定義為[15]:
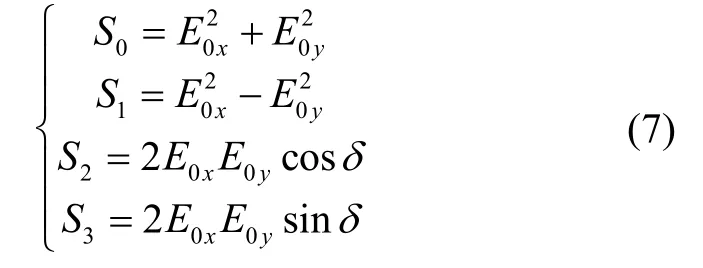
參量0S 表示偏振光總強度,1S 、2S 表示光波振動的優勢方向,3S 反映了偏振光的旋向。由斯托克斯矢量可以得到任意光的偏振態信息為:
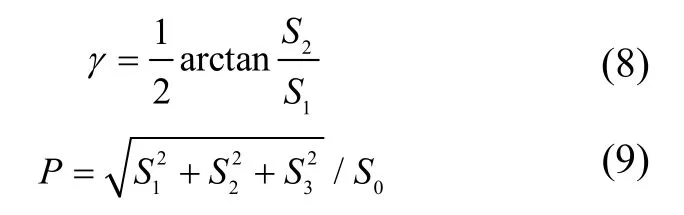
其中,γ 為測量基準和偏振方向之間的夾角;P為偏振度。
理想的線性偏振片的穆勒矩陣為:


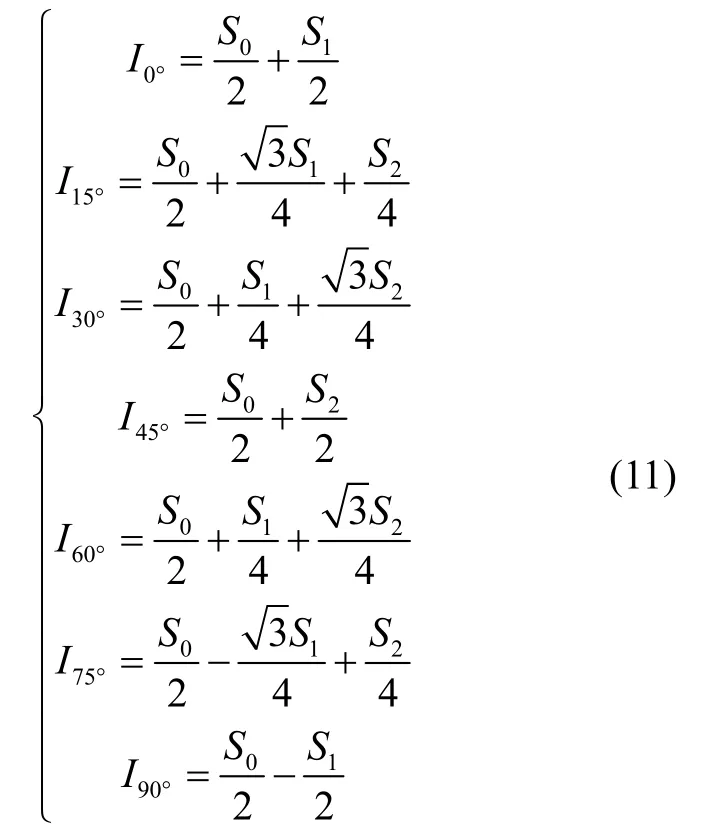
通過測量 I0°,I15°,I30°, I45°, I60°,I75°, I90°,代入式(11)組成超定方程組,通過最小二乘法數據擬合,即可求得 S0, S1, S2。由式(8)可得到偏振方向。γ 為測量系統軸線和偏振方向之間的夾角,即偏振測量角;偏振方位角φ 為P 點E 矢量振動方向與過P 點子午線的夾角,根據Rayleigh 粒子散射模型,φ 在天空分布中有固定角度(天頂點處為90 °);將觀測點選在天頂,則測量系統軸線與太陽子午線夾角為90 °- γ;偏振航向角K= 90°- γ + φS,其中太陽方位角 φS可由天文歷法確定。
2.2 航向測量系統設計
根據天空偏振信息分布,選取只測量天頂區域偏振光航向信息。設計一款航向測量系統,原理如圖3所示。
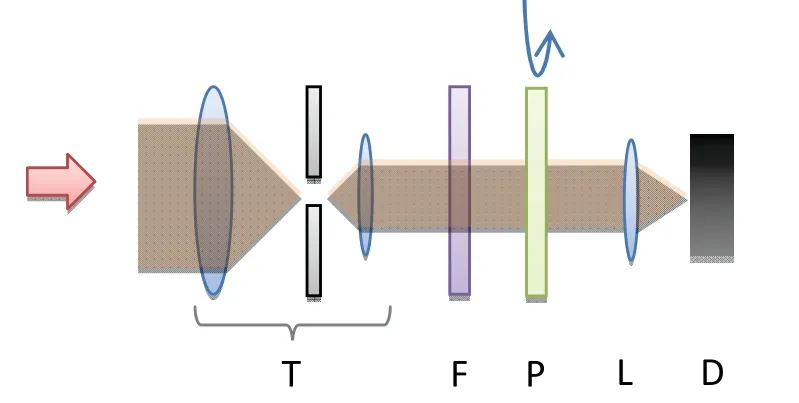
圖3 偏振航向測量系統原理圖Fig.3 Framework of polarization heading measurement system
天空散射光(入射光)通過望遠鏡T、帶通濾光片F 和可旋轉偏振片P 進入傳感器。望遠鏡T 內置小孔光闌。帶通濾光片F 用于選擇測量波段,根據天空偏振光特性,可選用藍紫光波段濾光片。可旋轉偏振片P 分別旋轉0 °、15 °、30 °,45 °、60 °、75 °、90 °,以通過光電探測器D 測量光強信息。這種設計的優勢在于,采用配置了小孔光闌的望遠鏡T 代替套筒結構實現聚光與定向測量功能,可有效避免雜散光干擾(絕大部分雜散光可被小孔光闌遮擋并被望遠鏡的消光鏡筒吸收);共光路方式則有助于部分消除因元器件誤差、環境因素等造成的系統誤差,提高光能利用率,提升檢測精度和靈敏度,并且能夠做到使測量系統具有同一視場。
3 實驗與結果
3.1 航向測量系統標定
實際應用環境中,需要考慮光學元件本身的諸多因素。實際線性偏振片的穆勒矩陣可表示為:

px,py為互相正交兩個光軸的吸收系數,且0≤px,py≤ 1。
此時,通過該偏振片后光束的斯托克斯參量S′第一個分量 S0′為:

則式(10)可重新表示為:

為了對航向測量系統進行標定,在室內構建基準偏振態發生裝置,如圖4 所示。基準偏振態發生裝置由激光器、1/4 波片、起偏器、電機組成,能產生近似理想的任意線偏振態的偏振光。通過控制基準偏振態發生裝置電控轉臺,產生7 組不同線偏振態。式(13)為超定方程組,輸入量為基準偏振發生裝置生成的已知線偏振態,即 S0、 S1、 S2已知;輸出量I 可由航向測量系統測量出,通過系統辨識方法可以得到A 和B的估計值A? 和B? 。實驗標定結果:A? 為0.240001,B?為0.239999。
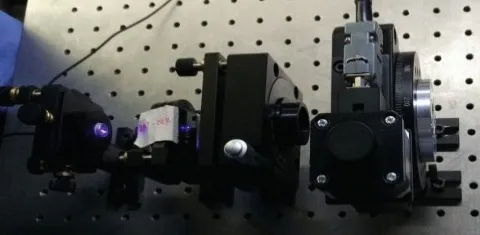
圖4 基準偏振態發生裝置Fig.4 Reference polarization generator
3.2 室內實驗
偏振光周期為π,因此我們在0~180 °對航向測量系統進行精度測試,如圖5 所示。通過控制電控轉臺以6 °為間隔,分別產生31 種不同方位角的入射線偏振光。輸出偏振光通過航向測量系統進行測量。實驗結果見圖6、圖7。

圖5 室內航向精度測試Fig.5 Indoor heading accuracy test
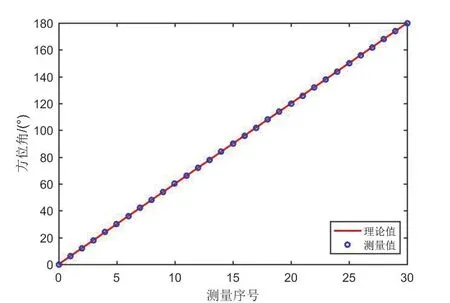
圖6 航向測試結果Fig.6 Heading test results
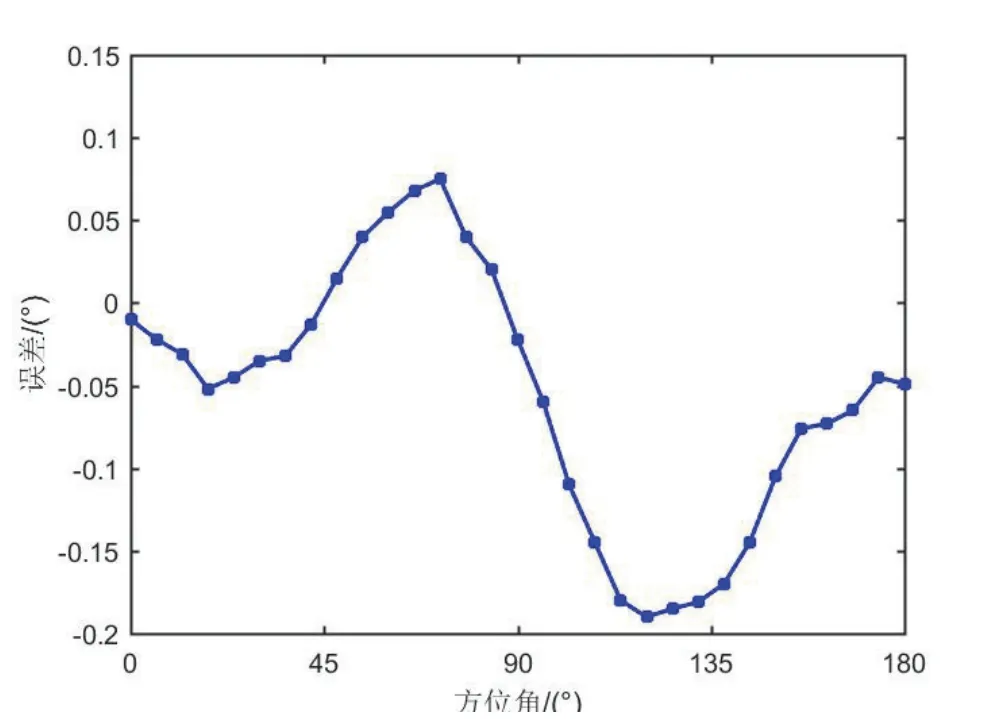
圖7 航向誤差Fig.7 Heading error
由測量結果可知,采用基于偏光調制的航向測量系統進行角度信息測量,其測量誤差最大值小于0.2 °。
3.3 室外實驗
室外實驗在北京理工大學北院6 號教學樓前空曠區域進行,時間為下午2:00,天空晴朗且有稍許絮狀云。實驗中將偏光調制航向測量系統固定在多齒分度臺上,保持多齒分度臺水平,如圖8 所示,多齒分度臺精度為0.2″。實驗中旋轉多齒分度臺從0 °依次至180 °,每隔10 °采集一組數據,共采集19 組,如表1所示。起始位置偏光測量系統航向約為0.32 °。室外航向測量實驗數據分析如表2 所示,最大誤差約為0.84 °,平均誤差約為0.54 °,標準誤差約為0.57 °。因為室外環境復雜,且光源中不僅有偏振光,還包含了部分非偏振光成分,致使精度相對于室內有所下降。

圖8 室外航向精度測試Fig.8 Outdoor heading accuracy test
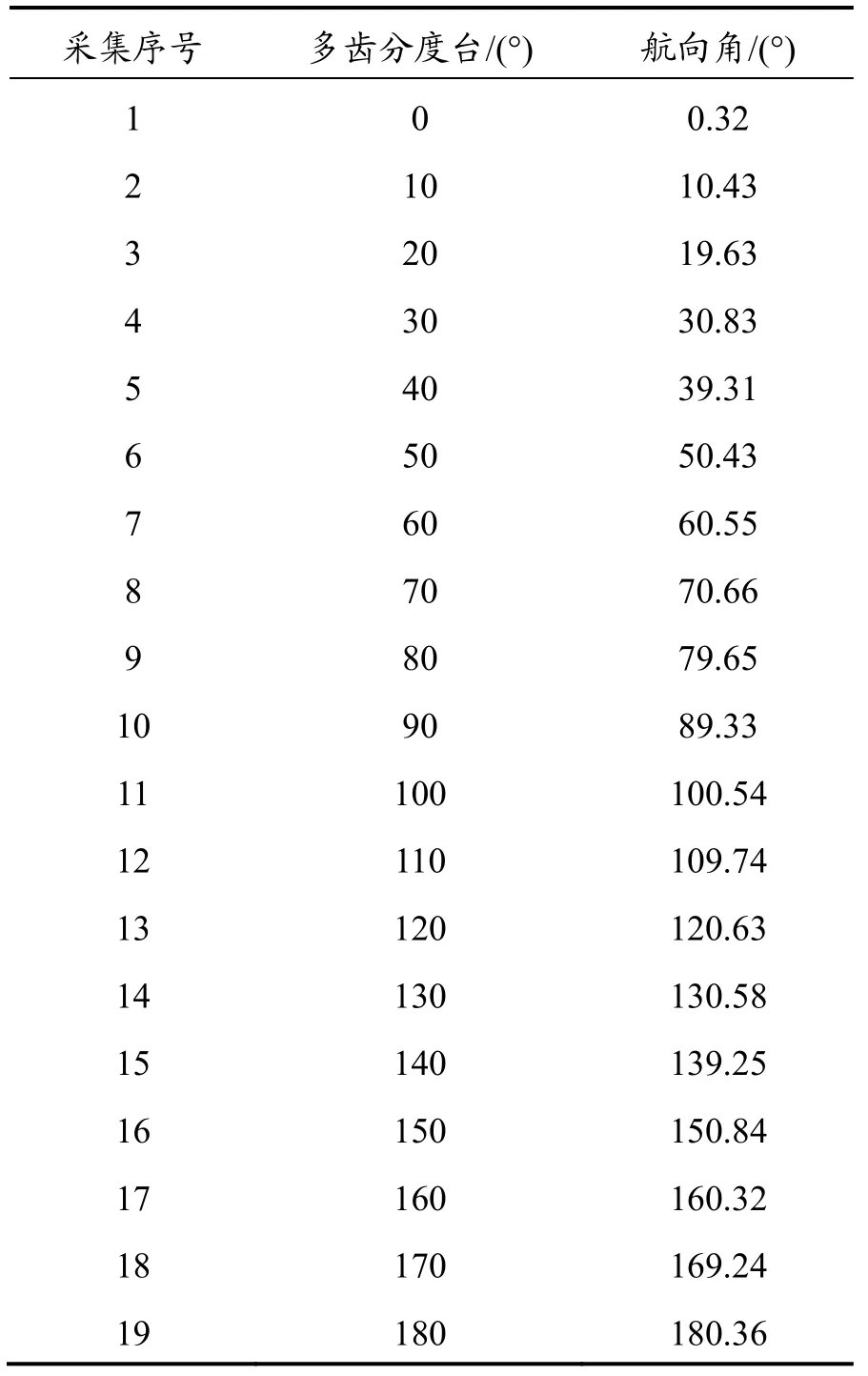
表1 室外實驗數據Tab.1 Outdoor experimental data

表2 室外實驗誤差Tab.2 Outdoor experiment error
4 結 論
本文設計了一種基于偏光調制原理的偏振航向測量系統,通過共用光路設計部分消除了多光路系統因元器件差異導致的系統誤差,提高了光能利用率;并采用小孔光闌加望遠鏡結構取代常用的套筒結構,有效避免了雜散光干擾,提高了測量精度。實驗結果表明:航向測量系統室內誤差小于0.2 °,室外誤差小于0.6 °,基本滿足天空偏振航向測量的精度要求。室外測量精度下降的主要原因是天空偏振特性受氣象條件等因素影響較大,要實現高精度偏振航向測量系統的推廣應用,不同氣象條件下天空偏振模式的精細化建模必不可少,這正是我們下一步要重點開展的工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45