光纖陀螺環(huán)路增益高精度實(shí)時(shí)檢測(cè)與閉環(huán)控制方法
2021-10-17 23:52:22張春熹秦雪馨孔令海
中國(guó)慣性技術(shù)學(xué)報(bào) 2021年3期
關(guān)鍵詞:檢測(cè)
張春熹,秦雪馨,鄭 月,孔令海
(北京航空航天大學(xué)儀器科學(xué)與光電工程學(xué)院,北京 100191)
光纖陀螺(Fiber Optic Gyroscope, FOG)是一種基于Sagnac 效應(yīng)的光纖角速度傳感器,具有精度覆蓋范圍廣、量程大、壽命長(zhǎng)、可靠性高等優(yōu)點(diǎn)[1],被廣泛應(yīng)用于軍用領(lǐng)域和民用領(lǐng)域(如石油、煤礦勘探等)[2]。
數(shù)字閉環(huán)光纖陀螺的環(huán)路一般包含前向通道和反饋通道。在理想閉環(huán)條件下,光纖陀螺的標(biāo)度因數(shù)主要取決于反饋通道增益,與前向增益無(wú)關(guān)[3]。為了保證反饋通道增益的穩(wěn)定性進(jìn)而保證標(biāo)度因數(shù)穩(wěn)定性,光纖陀螺中配置了集成光學(xué)調(diào)制器半波電壓的閉環(huán)跟蹤環(huán)節(jié),即光纖陀螺中的第二閉環(huán)[4](光纖陀螺對(duì)轉(zhuǎn)速信號(hào)的閉環(huán)一般稱為第一閉環(huán),第二閉環(huán)是相對(duì)于第一閉環(huán)而言)。然而,受到溫度、時(shí)間退化和電路串?dāng)_等因素影響,光纖陀螺的性能實(shí)際與前向通道增益穩(wěn)定性存在相關(guān)性[5]。實(shí)測(cè)數(shù)據(jù)表明[6],光纖陀螺在工作溫度范圍內(nèi)(一般為-40 ℃ ~ +75 ℃),前向增益變化典型值約為20%,反饋通道增益變化典型值約為10%;在長(zhǎng)時(shí)間工作或貯存條件下,光源性能參數(shù)的退化可能造成輸出光功率大幅衰減;特別是在人為加入抖動(dòng)信號(hào)抑制光纖陀螺死區(qū)時(shí),光纖陀螺檢測(cè)到的轉(zhuǎn)速中會(huì)含有抖動(dòng)信號(hào)對(duì)應(yīng)的偽轉(zhuǎn)速成分,其幅值隨前向增益變化而變化,難以進(jìn)行確定性補(bǔ)償[7-8]。因此,對(duì)前向增益的實(shí)時(shí)檢測(cè)與控制是實(shí)現(xiàn)抖動(dòng)信號(hào)穩(wěn)定與準(zhǔn)確補(bǔ)償從而提升光纖陀螺精度的關(guān)鍵技術(shù)。此外,陀螺光路或電路的故障一般會(huì)表現(xiàn)為前向增益的顯著變化;因此,前向增益的實(shí)時(shí)檢測(cè)也成為光纖陀螺故障判別的重要手段之一[9,10],對(duì)光纖陀螺在溫度變化、長(zhǎng)期應(yīng)用等條件下實(shí)現(xiàn)自檢自標(biāo)、問(wèn)題定位具有十分重要的意義。
傳統(tǒng)的前向通道增益檢測(cè)方案一般只關(guān)注到達(dá)探測(cè)器的光功率,其檢測(cè)通道一般包括低通濾波、A/D轉(zhuǎn)換和數(shù)字信號(hào)采集處理等環(huán)節(jié),存在以下缺陷:(1)需增加檢測(cè)電路的布線面積和功耗,往往無(wú)法滿足小型化需求;(2)只針對(duì)探測(cè)光功率進(jìn)行采集,忽略了前向增益中模擬電路、數(shù)字電路等傳遞環(huán)節(jié)。
針對(duì)以上問(wèn)題,本文提出了一種光纖陀螺全環(huán)路增益實(shí)時(shí)檢測(cè)與閉環(huán)控制方法。以光纖陀螺采用的典型四態(tài)調(diào)制為基礎(chǔ),增加用于全環(huán)路增益檢測(cè)的額外調(diào)制信號(hào);在光纖陀螺實(shí)現(xiàn)轉(zhuǎn)速跟蹤誤差解調(diào)與半波電壓誤差解調(diào)的同時(shí),實(shí)現(xiàn)光纖陀螺環(huán)路增益的實(shí)時(shí)解調(diào);并通過(guò)閉環(huán)調(diào)整新增的可調(diào)數(shù)字增益環(huán)節(jié),將環(huán)路增益收斂于預(yù)設(shè)參考值并保持穩(wěn)定。此方法普遍適用于溫變、振動(dòng)、長(zhǎng)期貯存等環(huán)境,在不增加硬件電路、不依賴外部設(shè)備的情況下可實(shí)現(xiàn)光纖陀螺全環(huán)路增益的實(shí)時(shí)、準(zhǔn)確檢測(cè)。
1 光纖陀螺環(huán)路增益理論分析
光纖陀螺閉環(huán)工作原理如圖1 所示[11],環(huán)路主要包含前向通道和反饋通道兩個(gè)部分。

圖1 光纖陀螺閉環(huán)工作原理Fig.1 Principle of the closed-loop FOG
圖1 中,Δφs為轉(zhuǎn)速引起的Sagnac 相位差;Δφf(shuō)為閉環(huán)反饋相位差,在理想閉環(huán)條件下,與待跟蹤的Δφs等值反號(hào),閉環(huán)誤差(Δφs與Δφf(shuō)之差)Δφe≈0。干涉環(huán)節(jié)中的P0為干涉光路無(wú)任何相位差時(shí)到達(dá)探測(cè)器的光功率,P0的變化表征了光源輸出功率變化與光路損耗變化的綜合影響。干涉環(huán)節(jié)中的Δφ表示Sagnac干涉儀中兩束光干涉時(shí)的總相位差,一般包含轉(zhuǎn)速閉環(huán)誤差Δφe和用于信號(hào)檢測(cè)的調(diào)制相位差Δφm;理想閉環(huán)條件下,Δφe<<Δφm,Δφ≈Δφm。調(diào)制信號(hào)一般為時(shí)變量,四態(tài)調(diào)制下的調(diào)制相位差Δφm依次為φ1,φ2,-φ1,-φ2(無(wú)2π 誤差時(shí),φ1+φ2=2π,φ1<π,φ2>π,如φ1=3π/4,φ2=5π/4)。光電探測(cè)部分可等效為比例環(huán)節(jié)K1,表示從干涉光功率到電壓的轉(zhuǎn)換關(guān)系;模擬放大部分在通帶范圍內(nèi)可用比例系數(shù)K2表示;K3、K4分別表示模數(shù)(A/D)轉(zhuǎn)換器的轉(zhuǎn)換系數(shù)和解調(diào)部分的數(shù)字增益。因此,光纖陀螺的前向增益可表示為:

其中,sinφ1項(xiàng)為轉(zhuǎn)速解調(diào)產(chǎn)生的結(jié)果。
反饋通道增益,即數(shù)模(D/A)轉(zhuǎn)換器的轉(zhuǎn)換系數(shù)、模擬放大驅(qū)動(dòng)電路增益和相位調(diào)制器調(diào)制系數(shù)增益之積,已通過(guò)閉環(huán)跟蹤集成光學(xué)調(diào)制器半波電壓(光纖陀螺第二閉環(huán))來(lái)保持穩(wěn)定[4],因此,環(huán)路增益穩(wěn)定主要針對(duì)前向通道增益。
2 環(huán)路增益檢測(cè)與閉環(huán)控制方案設(shè)計(jì)
2.1 環(huán)路增益檢測(cè)方案設(shè)計(jì)
為實(shí)現(xiàn)環(huán)路增益穩(wěn)定控制,首先要對(duì)環(huán)路增益進(jìn)行實(shí)時(shí)準(zhǔn)確檢測(cè)。本文以典型四態(tài)調(diào)制為基礎(chǔ),向集成光學(xué)調(diào)制器施加四態(tài)調(diào)制波形Δφm(t)的同時(shí),加入額外的增益監(jiān)控信號(hào)Δφg(t),如圖2 所示。四態(tài)調(diào)制信號(hào)的頻率為光纖環(huán)的本征頻率vk=1/2τ,Δφm(t)中每個(gè)狀態(tài)持續(xù)時(shí)間為光在光纖環(huán)渡越時(shí)間τ 的一半。增益監(jiān)控信號(hào)產(chǎn)生的相位差Δφg(t)為一個(gè)幅值為φg,頻率為vk/2 的方波信號(hào),與四態(tài)調(diào)制信號(hào)時(shí)序同步;將增益監(jiān)控信號(hào)一個(gè)周期內(nèi)的8 個(gè)τ/2 時(shí)間段分別記作sti(i=1,2,3…8)。圖2 還給出了Δφm(t)和Δφg(t)二者之和及其與恒定Sagnac 相位差Δφs之和的時(shí)序形式。
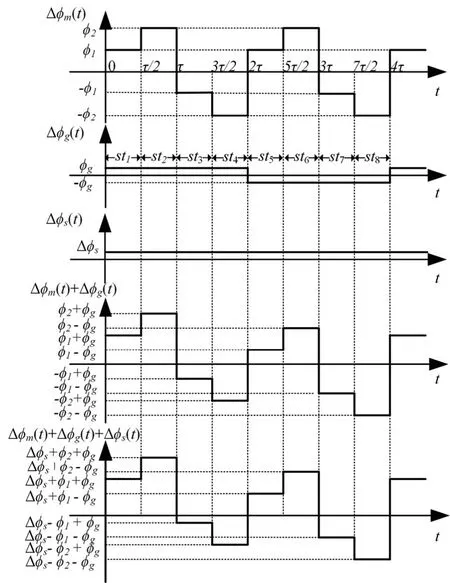
圖2 四態(tài)調(diào)制信號(hào)和增益監(jiān)控信號(hào)時(shí)序圖Fig.2 Waveforms of the four-state modulation signal and the gain-monitoring signal.
此時(shí),對(duì)于一個(gè)開(kāi)環(huán)工作的光纖陀螺,到達(dá)探測(cè)器的信號(hào)光功率可以表示為:

對(duì)應(yīng)的探測(cè)器輸出如圖3 所示。值得說(shuō)明的是,光纖陀螺第二閉環(huán)可保證Δφm(t)和Δφg(t)幅值的穩(wěn)定。

圖3 反饋通道增益準(zhǔn)確時(shí)四態(tài)調(diào)制信號(hào)和增益監(jiān)控信號(hào)組合調(diào)制下的探測(cè)器輸出圖Fig.3 Detector outputs with the combined modulation of the four-state-modulation and gain-monitoring signals when the feedback-path gain is accurate
探測(cè)器信號(hào)經(jīng)過(guò)前放后進(jìn)行數(shù)字量化編碼,當(dāng)反饋通道增益無(wú)誤差時(shí),增益監(jiān)控信號(hào)Δφg(t)一個(gè)周期內(nèi)sti(i=1,2,3…8)各狀態(tài)下對(duì)應(yīng)的數(shù)字量分別為:
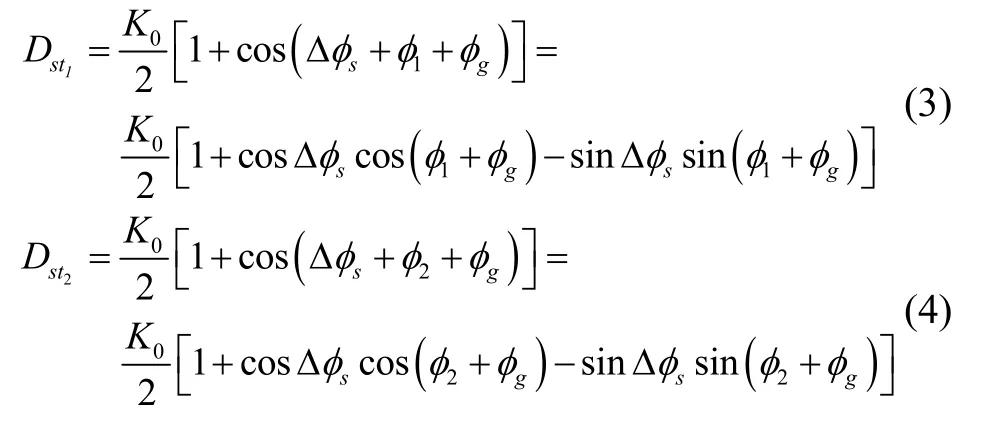
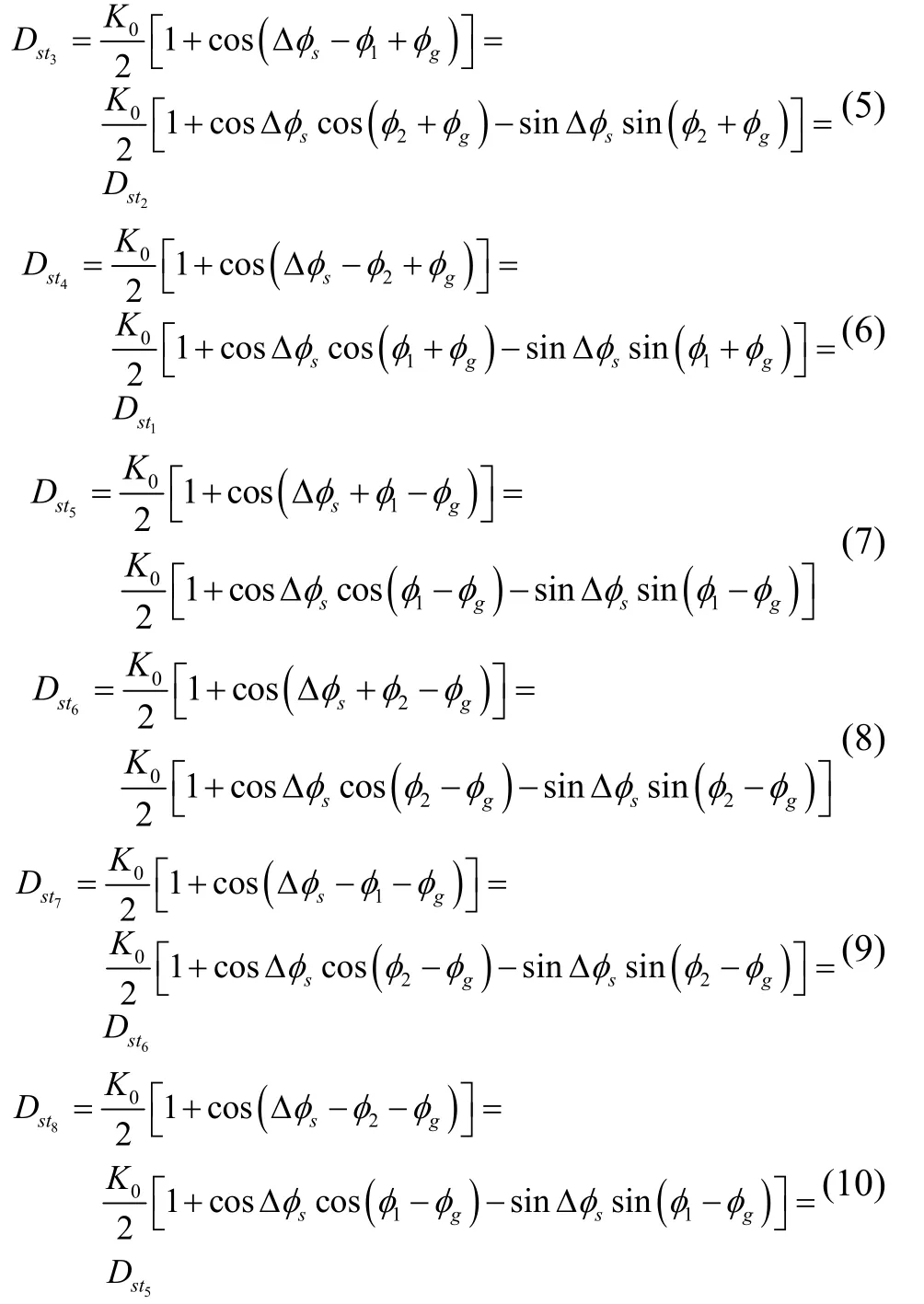
其中,K0= P0·K1·K2·K3·K4,為不包含sinφ1項(xiàng)的前向通道增益。開(kāi)環(huán)下的轉(zhuǎn)速解調(diào)結(jié)果為:
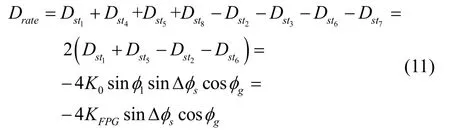
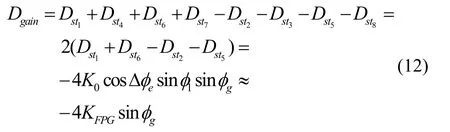
閉環(huán)工作時(shí),式(11)中的Δφs被閉環(huán)誤差Δφe替代,且Δφe≈0。對(duì)光纖陀螺前向通道增益的解調(diào)計(jì)算如式(12)所示。結(jié)果包含了前向增益KFPG。
與傳統(tǒng)的四態(tài)調(diào)制相似,利用各狀態(tài)數(shù)字量可得到光纖陀螺的第二閉環(huán)誤差;通過(guò)閉環(huán)調(diào)整進(jìn)而實(shí)現(xiàn)反饋通道增益的穩(wěn)定。圖4 為第二閉環(huán)誤差為零與不為零兩種情況下探測(cè)器輸出的波形圖,當(dāng)存在第二閉環(huán)跟蹤誤差,即反饋通道增益不準(zhǔn)確時(shí),可將調(diào)制相位差幅值表示為aφ1和aφ2(a≠1)。
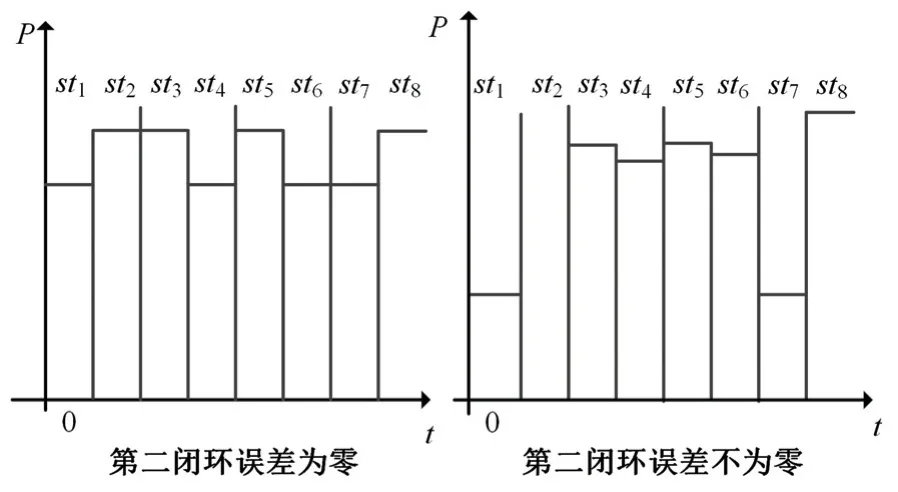
圖4 第二閉環(huán)誤差為零與不為零時(shí)探測(cè)器輸出波形圖Fig.4 Detector outputs when the second-closed-loop errors are zero and non-zero, respectively.
第二閉環(huán)跟蹤誤差的解調(diào)結(jié)果可表示為式(13)。
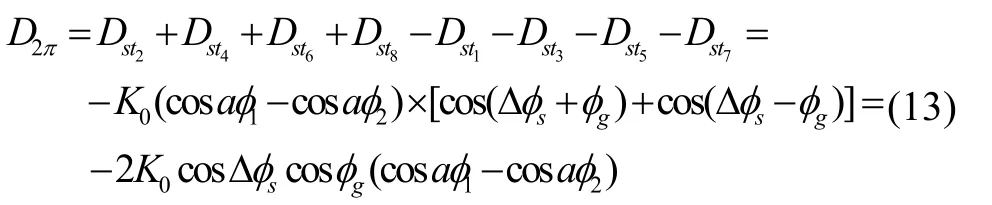
因此,在傳統(tǒng)四態(tài)調(diào)制中增加增益監(jiān)控信號(hào),通過(guò)式(11)(12)(13)可分別實(shí)現(xiàn)轉(zhuǎn)速、前向增益和第二閉環(huán)誤差的解調(diào);其中式(11)和(13)表示的解調(diào)方式與傳統(tǒng)四態(tài)調(diào)制無(wú)本質(zhì)區(qū)別,式(12)所示的前向增益解調(diào)方法是本文關(guān)注的重點(diǎn),也是實(shí)現(xiàn)環(huán)路增益檢測(cè)的核心及實(shí)現(xiàn)環(huán)路增益穩(wěn)定控制的基礎(chǔ)。
2.2 環(huán)路增益閉環(huán)控制方案設(shè)計(jì)
傳統(tǒng)的光纖陀螺閉環(huán)控制回路如圖5 中的實(shí)線框和實(shí)線箭頭所示。在2.1 節(jié)所述增益檢測(cè)方案的基礎(chǔ)上,增加增益閉環(huán)控制回路,如圖5 虛線框和虛線箭頭所示;此回路主要保證了前向通道增益的穩(wěn)定,并與第二閉環(huán)共同工作保證了整體環(huán)路增益的穩(wěn)定。

圖5 增益閉環(huán)控制原理框圖Fig.5 Diagram of the automatic gain control loop
在增益閉環(huán)控制回路中,增益解調(diào)為式(12)所示的計(jì)算過(guò)程,參考增益表示了閉環(huán)調(diào)整的收斂目標(biāo)值;增益誤差為實(shí)際增益解調(diào)值與參考增益之差;之后,增益誤差通過(guò)積分器和濾波器,輸出控制可調(diào)數(shù)字增益Kadj;Kadj為前向通道增益中新增加的一部分。式(11)至(13)所示的轉(zhuǎn)速、增益和第二閉環(huán)誤差的解調(diào)結(jié)果分別變?yōu)椋?/p>
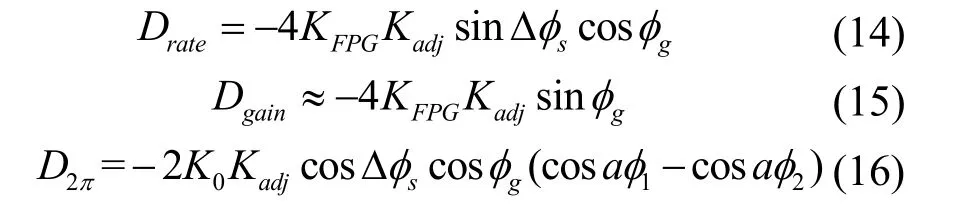
此時(shí),前向通道增益變?yōu)镵FPG和Kadj的乘積,通過(guò)增益閉環(huán)自動(dòng)控制回路,Kadj可實(shí)時(shí)補(bǔ)償KFPG的變化,使前向增益穩(wěn)定保持為參考增益值。
3 實(shí)驗(yàn)與討論
3.1 增益檢測(cè)效果實(shí)驗(yàn)驗(yàn)證
對(duì)增益檢測(cè)效果實(shí)驗(yàn)驗(yàn)證采用的光纖陀螺主要參數(shù)為光纖環(huán)直徑約70 mm,光纖長(zhǎng)度約900 m,光源輸出中心波長(zhǎng)約1531 nm。實(shí)驗(yàn)條件為測(cè)試光纖陀螺不同器件、部件在溫變下的損耗(增益)變化。具體實(shí)現(xiàn)方法為將待測(cè)部分放入溫箱,在溫變條件下,光路輸出信號(hào)通過(guò)新增的耦合器(50:50,1 分2)一路接入光功率計(jì)作為測(cè)試基準(zhǔn),另一路接入光電探測(cè)器利用本文提出方法進(jìn)行檢測(cè);通過(guò)二者對(duì)比定量評(píng)估此方案增益檢測(cè)的準(zhǔn)確性,如圖6 所示。實(shí)驗(yàn)測(cè)試對(duì)象包括光纖陀螺敏感環(huán)、光纖陀螺全光路(包含光源、光源耦合器、敏感環(huán))和前置放大電路板。值得說(shuō)明的是,使用的光功率計(jì)測(cè)試光學(xué)器件和全光路損耗是普遍采用的標(biāo)準(zhǔn)測(cè)試方法,但其無(wú)法覆蓋電路部分測(cè)試,這也是傳統(tǒng)測(cè)試方法的顯著缺陷之一。

圖6 光纖陀螺增益檢測(cè)實(shí)驗(yàn)裝置示意圖Fig.6 Diagram of the experimental setup for gain measurements
(1)變溫下敏感環(huán)損耗變化測(cè)試
為定量評(píng)估增益檢測(cè)精度,首先需對(duì)本文提出的增益檢測(cè)方案輸出結(jié)果進(jìn)行標(biāo)定,得到輸出數(shù)字量與真實(shí)輸出功率之間的對(duì)應(yīng)關(guān)系。實(shí)現(xiàn)方法為,在常溫下對(duì)實(shí)驗(yàn)中光纖陀螺的光源驅(qū)動(dòng)電流進(jìn)行調(diào)整,得到不同驅(qū)動(dòng)電流下光路輸出的光功率值(光功率計(jì)的輸出)和增益檢測(cè)結(jié)果(本文提出方法的輸出),利用線性擬合得到二者間的線性函數(shù)關(guān)系。以此為基礎(chǔ),將實(shí)驗(yàn)中的增益檢測(cè)結(jié)果轉(zhuǎn)換為光功率值。
將光纖敏感環(huán)放入溫箱,其他部件置于常溫環(huán)境,溫箱溫度在約3500 s 內(nèi)由-40 °C 升至60 °C 以上,增益檢測(cè)輸出結(jié)果和光功率計(jì)測(cè)量結(jié)果通過(guò)線性標(biāo)定函數(shù)關(guān)系轉(zhuǎn)換到同一坐標(biāo)系中。由于實(shí)驗(yàn)所用光功率計(jì)的典型數(shù)據(jù)記錄更新率約為0.1 Hz,增益檢測(cè)結(jié)果的輸出更新率為1 Hz;為便于定量比較,將增益檢測(cè)輸出數(shù)據(jù)進(jìn)行10 s 平滑(圖7 紅線)。由圖7 可知,平滑后的增益檢測(cè)輸出曲線與光功率計(jì)測(cè)試結(jié)果(圖7藍(lán)虛線)變化趨勢(shì)基本一致。在被測(cè)量光功率范圍為17.3 μW ~ 18.3 μW 的情況下,增益檢測(cè)結(jié)果相對(duì)于光功率計(jì)的均方根誤差為1.55×10-2μW。
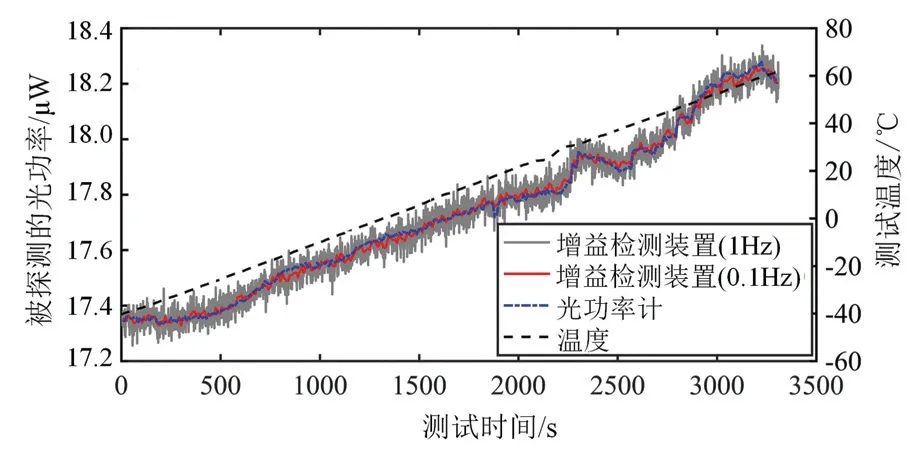
圖7 敏感環(huán)在變溫環(huán)境下光路輸出光功率測(cè)試結(jié)果Fig.7 The output power of the optical loop when the sensing coil is under temperature variation.
(2)變溫下全光路損耗變化測(cè)試
以本節(jié)(1)中實(shí)驗(yàn)裝置為基礎(chǔ),將光纖陀螺光路包含的敏感環(huán)、光源及光源耦合器全部放入溫箱,新增的用于光功率探測(cè)的耦合器、光電探測(cè)器和檢測(cè)電路部分置于常溫環(huán)境中,分別使用本文提出的增益檢測(cè)方案和光功率計(jì)測(cè)試光路在溫變下(溫變條件同本節(jié)(1)部分)光功率的輸出變化情況,測(cè)試數(shù)據(jù)處理方法同本節(jié)(1)部分。如圖8 所示兩種方法的結(jié)果隨溫度變化趨勢(shì)基本一致,在被測(cè)量光功率范圍為16.7 μW ~ 18.2 μW 的情況下,增益檢測(cè)結(jié)果相對(duì)于光功率計(jì)的均方根誤差為3.18×10-2μW。
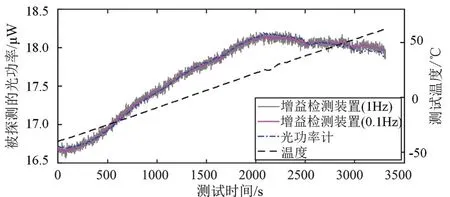
圖8 全光路在變溫環(huán)境下輸出光功率測(cè)試結(jié)果Fig.8 The output power of the optical loop when the whole optical loop is under temperature variation
(3)變溫下前置放大電路增益變化測(cè)試
將前置放大電路板放入溫箱,其他光學(xué)部件置于常溫環(huán)境,使用本文提出方案對(duì)前置放大電路在溫變下(溫變條件同本節(jié)(1)、(2)部分)的增益變化測(cè)試結(jié)果如圖9 所示(光功率計(jì)測(cè)試方案無(wú)法覆蓋電路部分測(cè)試)。可見(jiàn)電路中電子器件的增益隨溫度升高而呈變大的趨勢(shì);溫度在-40℃至+60℃范圍內(nèi),由電路引起的前向增益變化極差約為28%。
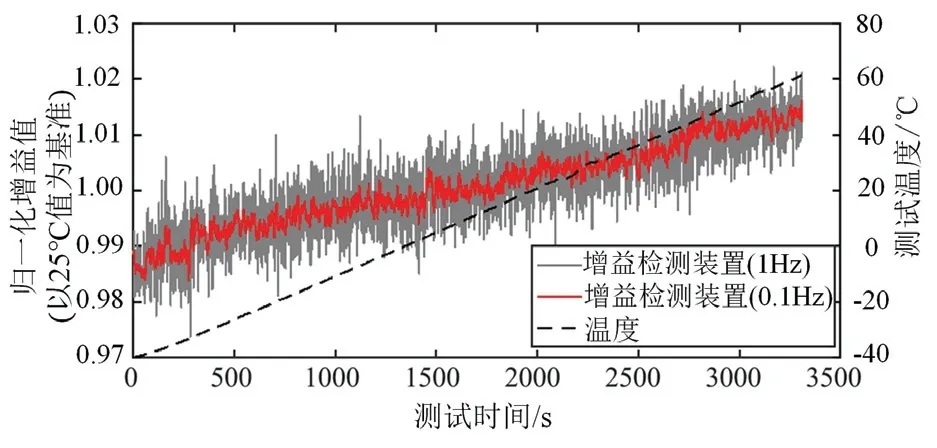
圖9 前向通道電路在變溫條件下增益變化測(cè)試結(jié)果Fig.9 The measurements of the gain for the detection circuit in the forward path under temperature variation
3.2 增益閉環(huán)控制效果實(shí)驗(yàn)驗(yàn)證
下面驗(yàn)證2.2 節(jié)提出的增益閉環(huán)控制的實(shí)際應(yīng)用效果。將光纖陀螺整體放入溫箱內(nèi),使用本文提出的增益檢測(cè)方案分別在增益閉環(huán)控制不工作與工作兩種條件下對(duì)光纖陀螺在-40 ℃至+60 ℃溫變環(huán)境中的前向增益變化進(jìn)行測(cè)試,測(cè)試結(jié)果以25 ℃時(shí)的增益測(cè)量值為基準(zhǔn)進(jìn)行歸一化處理。如圖10 所示,前向增益變化量由19.8%減小為約0.12%。

圖10 增益閉環(huán)控制工作與不工作兩種情況下前向增益變化測(cè)試結(jié)果Fig.10 Measurements of the forward path gain when with and without the automatic gain control loop, the results are shown
3.3 討 論
通過(guò)實(shí)驗(yàn)驗(yàn)證了本文提出的增益檢測(cè)和閉環(huán)控制方案的正確性和有效性。相比于傳統(tǒng)依賴光功率計(jì)的測(cè)試方案,其顯著優(yōu)勢(shì)如下:(1)該方案可在溫度、振動(dòng)等特殊應(yīng)用環(huán)境中以及在系統(tǒng)長(zhǎng)期貯存、無(wú)法拆卸等實(shí)際條件下實(shí)現(xiàn),無(wú)需增加硬件電路、不依賴外部設(shè)備;(2)增益檢測(cè)裝置的更新率及閉環(huán)控制速度可人為設(shè)定,可根據(jù)系統(tǒng)測(cè)試需求進(jìn)行便捷調(diào)整;(3)可解決傳統(tǒng)增益檢測(cè)中無(wú)法直接、準(zhǔn)確、全面衡量電子器件影響的缺陷。
然而,此方案仍存在一定局限性:(1)電路串?dāng)_等因素可能導(dǎo)致增益測(cè)量出現(xiàn)誤差;(2)當(dāng)實(shí)際增益值與設(shè)定參考值存在較大偏差時(shí),可能導(dǎo)致閉環(huán)控制無(wú)法正常工作,因此需設(shè)定合理的增益參考值;(3)只能檢測(cè)整個(gè)環(huán)路的增益變化,當(dāng)增益檢測(cè)結(jié)果出現(xiàn)異常時(shí),難以準(zhǔn)確分離故障部件。下一步工作需針對(duì)以上問(wèn)題繼續(xù)開(kāi)展深入研究。
4 結(jié) 論
本文提出了一種光纖陀螺環(huán)路增益檢測(cè)與閉環(huán)控制方法。通過(guò)在傳統(tǒng)四態(tài)調(diào)制波形的基礎(chǔ)上加入增益監(jiān)控方波,可實(shí)現(xiàn)對(duì)環(huán)路增益的實(shí)時(shí)解調(diào)。光纖陀螺控制回路中包含的轉(zhuǎn)速跟蹤誤差解調(diào)、集成光學(xué)調(diào)制器半波電壓跟蹤誤差解調(diào)和環(huán)路增益解調(diào)的工作頻率點(diǎn)分別在本征頻率、二倍本征頻率和本征頻率一半處,互相之間無(wú)影響和串?dāng)_。通過(guò)實(shí)時(shí)比較增益解調(diào)值與設(shè)定參考增益獲取增益誤差,進(jìn)一步用于閉環(huán)調(diào)整環(huán)路中新引入的可調(diào)數(shù)字增益部分,實(shí)現(xiàn)全環(huán)路增益的穩(wěn)定保持。通過(guò)改變光纖陀螺環(huán)路中部件的環(huán)境溫度實(shí)現(xiàn)其損耗或增益的變化,將本文提出的增益檢測(cè)方案與光功率計(jì)測(cè)試結(jié)果對(duì)比,驗(yàn)證了增益檢測(cè)方案的正確性與可行性;通過(guò)對(duì)比增益閉環(huán)控制不工作與工作兩種條件的溫變下增益變化檢測(cè)值,驗(yàn)證了增益閉環(huán)控制對(duì)穩(wěn)定環(huán)路增益的有效性。
本文提出的增益檢測(cè)與閉環(huán)控制方法可在溫度、振動(dòng)、長(zhǎng)期貯存、無(wú)法拆卸等實(shí)際條件下實(shí)現(xiàn),具有不增加硬件電路、不依賴外部設(shè)備等優(yōu)勢(shì),對(duì)光纖陀螺的設(shè)計(jì)和應(yīng)用具有參考意義。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
 中國(guó)慣性技術(shù)學(xué)報(bào)2021年3期
中國(guó)慣性技術(shù)學(xué)報(bào)2021年3期
- 中國(guó)慣性技術(shù)學(xué)報(bào)的其它文章
- 一類不確定廣義系統(tǒng)故障估計(jì)的有限時(shí)間魯棒觀測(cè)器設(shè)計(jì)
- 中低緯度評(píng)估極區(qū)導(dǎo)航時(shí)IMU數(shù)據(jù)轉(zhuǎn)換誤差模型
- 超高靈敏度加速度計(jì)溫度模型測(cè)試方案與實(shí)驗(yàn)
- 雙質(zhì)量塊MEMS陀螺內(nèi)互聯(lián)引線的設(shè)計(jì)與實(shí)現(xiàn)
- 基于ACS算法的MEMS加速度計(jì)現(xiàn)場(chǎng)標(biāo)定方法
- 一種小尺寸慣性式矢量水聽(tīng)器的振速放大結(jié)構(gòu)設(shè)計(jì)