基于魯棒模型的航空交流感應電機預測轉矩控制
2021-10-20 03:05:24顏黎明趙冬冬焦寧飛
航空學報 2021年9期
關鍵詞:模型
顏黎明,趙冬冬,焦寧飛
1. 長安大學 汽車學院,西安 710064
2. 西北工業大學 自動化學院,西安 710129
高性能電機驅動系統是航空領域的核心技術和關鍵裝備。在電機控制策略方面,繼矢量控制和直接轉矩控制之后,契合了電力電子系統開關組合模式及預測控制思想的有限集模型預測控制(Finite Control Set-Model Predictive Control, FCS-MPC),以其概念直觀、動態性能好及易于處理非線性約束等諸多優點,成為電力驅動領域的國際研究前沿[1-6]。FCS-MPC由“預測”和“優化”兩階段組成。在“預測”階段,基于感應電機離散數學模型及電壓矢量計算下一時刻感應電機的系統狀態[7-11]。失配的電機參數必然引起預測誤差,致使在“優化”階段無法獲取最優的電壓矢量,導致系統性能下降甚至失穩。針對上述問題,學者們一方面探究不匹配參數與預測誤差之間耦合關系,另一方面則研究不同的補償策略,以提高模型預測控制的魯棒性能。
在不匹配參數導致預測誤差的理論分析方面,學者們建立了不匹配參數與預測誤差間的解析表達式。通過仿真法和實驗法定量地研究了兩者直接的耦合關系。文獻[12]針對三相電壓源逆變器,分析了不匹配電阻及電感參數在不同負載條件下對定子電流矢量預測誤差的影響關系。文獻[13]針對永磁同步電機驅動系統,建立了不匹配電阻及電感參數與電磁轉矩預測誤差的解析表達式,并提出了基于上一采樣時刻電流預測誤差的補償策略,減小了電磁轉矩脈動,提高了系統的魯棒性。文獻[14]提出了一種基于擾動觀測器及電感參數在線辨識的增強型預測轉矩控制。
在預測控制的魯棒性能提升方面,一些學者提出將失配參數引起的預測誤差當做系統擾動,基于自抗擾控制理論或擾動前饋補償理論抑制預測誤差[15-17]。文獻[18]提出了一種基于擾動前饋補償的感應電機預測轉矩控制,詳細地闡述了擾動觀測器的設計方法及預測轉矩控制的魯棒性能。文獻[19]提出了一種基于廣義比例積分觀測器的感應電機魯棒預測電流控制,電流預測誤差由觀測器實時估計并采用前饋補償的方式,提高了系統的魯棒性。文獻[20]融合了自抗擾控制技術和模型預測轉矩控制,在轉速環采用自抗擾控制抑制轉矩環產生的電磁轉矩預測誤差,實驗結果驗證了該方法的有效性。
此外,另一些學者則將FCS-MPC與在線參數辨識技術融合起來,基于參數在線辨識技術實時更新預測模型,以提高定子電流或電磁轉矩的預測精度。文獻[21]提出了一種融合最小二乘法參數辨識技術的永磁同步電機預測轉矩控制。文獻[22]提出了一種融合模型參考自適應理論的永磁同步電機模型預測轉矩控制。文獻[23]提出了一種基于遞推最小二乘算法的模型預測電流控制,實現了無刷同步起動/發電機在勵磁突變情況下的起動控制,并通過調整遺忘因子以跟蹤主電機參數的快速變化。文獻[24]針對三相PWM整流器提出了一種在線電感參數辨識的直接預測功率控制法。上述方法多從被動方式抑制或消除不匹配參數引起的預測誤差,尚未從模型自身的抗擾性出發,建立具有自抗擾性的魯棒模型。
一些學者提出利用比例積分調節器校正預測模型誤差。在文獻[17]中,針對永磁同步電機模型預測轉矩控制,提出了改進型轉矩預測模型,此方法直接依據電磁轉矩跟蹤誤差構建基于PI調節器的誤差補償器。在文獻[25]中,針對儲能逆變器,提出了一種基于輸出誤差積分量和狀態預測值的全維狀態反饋控制策略。文獻[26]提出了一種基于預測誤差校正的永磁同步電機預測電流控制,此方法將電流預測值與比例系數之積直接補償到下一步的預測值上,提高了電流的預測精度。本文針對感應電機預測轉矩控制,首先深入地研究了失配參數對電磁轉矩預測精度的影響規律,建立了定子電流和磁鏈的閉環預測模型,探討了閉環模型的參數設計方法,并通過實驗驗證了所提方法的有效性。
在傳統預測轉矩控制中,預測模型由感應電機微分方程經一階向前歐拉法離散獲得,此預測模型是一種開環的預測模式。為抑制失配參數引起的預測誤差,提高預測轉矩控制的魯棒性,本文提出了基于魯棒模型的感應電機預測轉矩控制系統。其中,魯棒模型是一種閉環的預測模式,其基本思想來源于反饋控制理論,利用反饋機制提高系統的抗擾性能。本文的安排如下:第1節介紹感應電機數學模型及傳統預測轉矩控制,第2節闡述魯棒模型的構造方法及穩定性分析,第3節通過動態性能、穩態性能及參數魯棒性能3方面對比傳統預測轉矩控制(Traditional Predictive Torque Control, TPTC)及基于魯棒模型的預測轉矩控制(Robust Model based-Predictive Torque Control, RMB-TPC)。
1 感應電機數學模型及傳統預測轉矩控制
基于空間矢量理論的感應電機數學模型為
(1)
(2)
(3)
式中:ψs和ψr為定子磁鏈和轉子磁鏈,其中ψs=Lsis+Lmir、ψr=Lmis+Lrir;is和ir為定子電流和轉子電流;Rs和Rr代表定子電阻和轉子電阻;Ls、Lr及Lm分別為定、轉子電感及勵磁電感;ωr為轉子轉速;vs為兩電平逆變器的電壓矢量。
在感應電機預測轉矩控制中,在“預測”階段,基于一階歐拉法離散化后的預測方程為
ψs(k+2)=ψs(k+1)+Tsvs(k+1)-
RsTsis(k+1)
(4)
(5)
(6)

在“優化”階段,基于評價函數選擇使其最小的電壓作為最優電壓,并在下一時刻施加此最優矢量。在傳統的預測轉矩控制中,評價函數包含電磁轉矩跟蹤及定子磁鏈幅值跟蹤,具體為
λψ||ψs|*-|ψs(k+2)||
(7)

傳統預測轉矩控制框圖及執行序列圖如圖1 所示。由圖1及預測方程可知,此模型是一種開環模式,不能抑制失配參數引起的預測誤差。
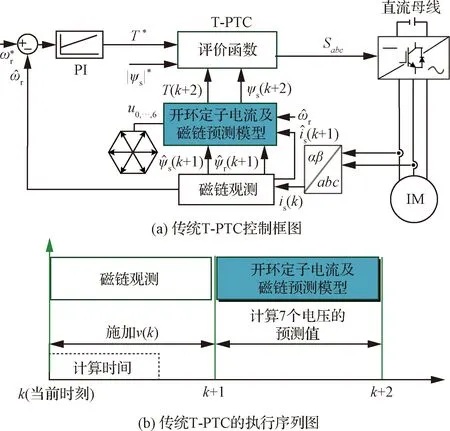
圖1 傳統預測轉矩控制Fig.1 Traditional predictive torque control

圖2 失配參數對定子磁鏈預測誤差和電磁轉矩預測誤差的影響規律Fig.2 Influence of mismatch parameters on stator flux prediction error and prediction error of electromagnetic torque
2 RMB-TPC的構造原理及分析
RMB-TPC的框圖和執行序列如圖3所示。其中,“魯棒模型”是由基于閉環模型的定子電流預測和基于離散混合模型的定子磁鏈預測組成。
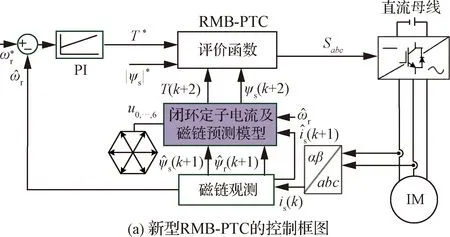
圖3 基于魯棒模型的預測轉矩控制Fig.3 Robust model based-predictive torque control
2.1 基于閉環模型的定子電流預測
基于式(1)~式(3)可推導出以定子電流及轉子磁鏈為狀態變量的定子電流方程,如下:
(8)
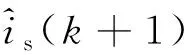
為消除定子電流開環預測方程(5)無法抑制預測誤差擾動的缺點,本文提出的閉環模式的定子電流預測方程為
(9)

在式(9)中,補償項vsum的表達式為
vsum(k+1)=(k1+Tsk2)is_error(k+1)-
ψr(k+1)
(10)
其中:k1和k2為比例系數及積分系數,is_error(k+1)為定子電流預測誤差,由方程
(11)
(12)
在本文中n=2。閉環模式的定子電流預測框圖如圖4所示。
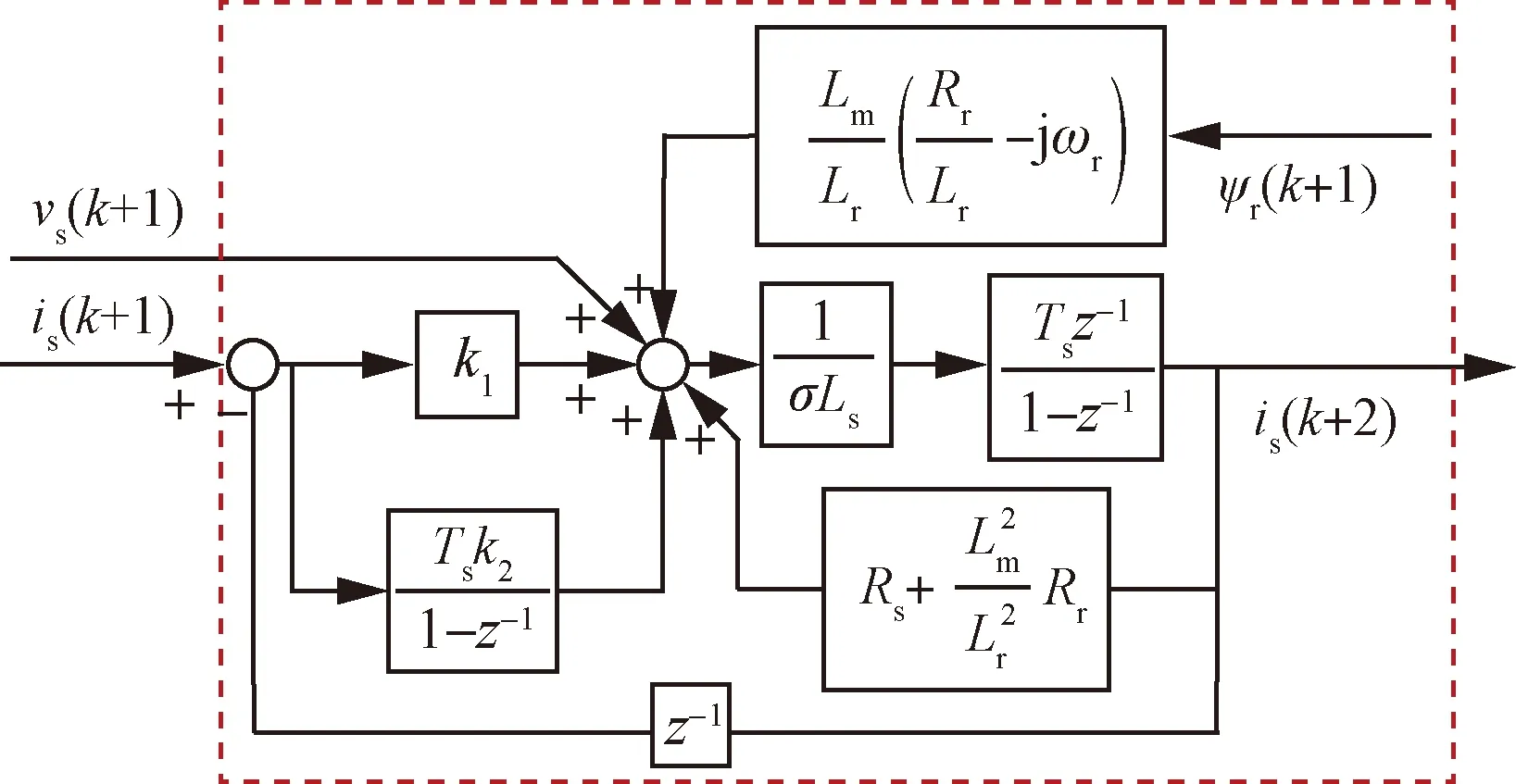
圖4 基于閉環模型的定子電流預測框圖Fig.4 Diagram of stator current prediction based on closed-loop model
2.2 定子磁鏈的兩種預測模型
感應電機定子磁鏈矢量可由電流模型計算得到。在以任意速度ω旋轉的坐標系,基于定子電流矢量的轉子磁鏈方程為
(13)
式中:ωr為轉子速度。為消除方程中轉速ωr變量的影響,令ω=ωr,則可得到在轉子旋轉坐標系下的轉子磁鏈方程。
(14)
基于一階歐拉法(Tsz-1/1-z-1)可得到離散化的轉子磁鏈方程,
(15)
式中:Ts為離散系統的采樣周期。因此,通過旋轉變換方程
(16)
依據定子磁鏈與轉子磁鏈的關系,可獲取定子坐標系下定子磁鏈的解析表達式為
(17)

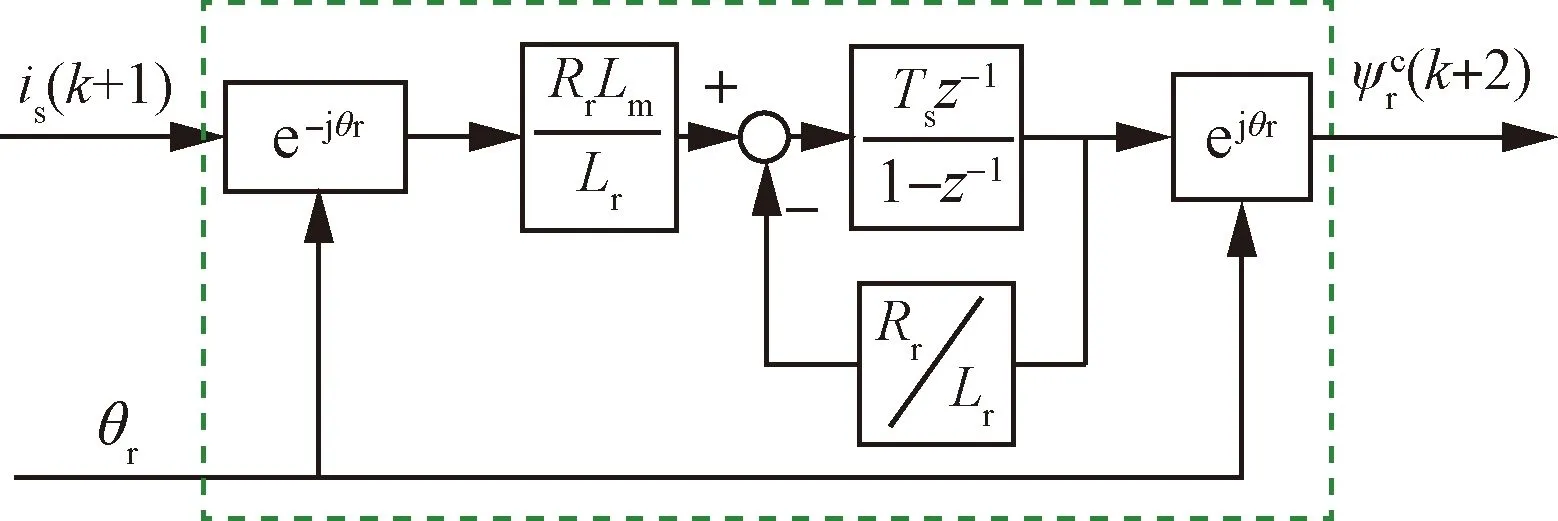
圖5 基于電流模型的定子磁鏈預測Fig.5 Diagram of stator flux prediction based on current model
定子磁鏈矢量預測的另一種方法是電壓模型,多應用于傳統的感應電機模型預測轉矩控制中,具體的離散化定子磁鏈預測方程為
RsTsis(k+1)
(18)
依據定轉子磁鏈的關系,可獲取轉子磁鏈矢量的解析表達式為
(19)
圖6為基于電壓模型的定子磁鏈矢量預測框圖,其中Tsz-1/1-z-1代表向前歐拉離散法。
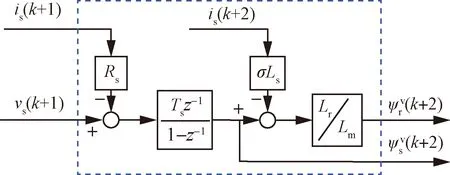
圖6 基于電壓模型的定子磁鏈預測Fig.6 Diagram of stator flux prediction based on voltage model
2.3 基于離散混合模型的定子磁鏈預測
為提高定子磁鏈預測的魯棒性,本文提出了融合電壓模型和電流模型的定子磁鏈離散混合模型,電壓模型到電流模型的切換由比例積分調節器控制。定子磁鏈離散混合模型和定子電流閉環模型共同組成魯棒模型,具體框圖如圖7所示。虛線框內為定子磁鏈離散混合模型的調節器,k3和k4分別為比例系數及積分系數。在圖7中,補償項的差分方程為
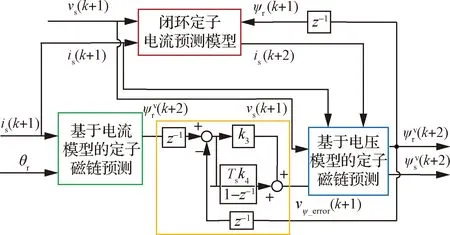
圖7 魯棒預測模型的整體框圖Fig.7 Diagram of robust prediction model
(20)
因此,帶補償的定子磁鏈矢量計算公式為
RsTsis(k+1)+Tsvψ_error(k+1)
(21)
2.4 RMB-TPC魯棒模型的穩定性分析
依據離散系統控制理論,定子磁鏈離散混合模型的傳遞函數為
(22)
式中:N1、N2、D1、D2以及D3的表達式為
依據離散系數控制理論,傳遞函數(22)的特征方程為z2+(P1+P2)z+(P1P2)=0,其中P1P2=(D3/D1)、P1+P2=(D2/D1)。P1=e-2f1Ts和P2=e-2f2Ts為傳遞函數(22)的極點,f1和f2為離散混合模型的兩個根,因此,調節器參數k3和k4可依據兩個根的取值設定。
同樣地,定子電流閉環模型的傳遞函數為
(23)
式中:M1、M2、E1、E2及E3的表達式為
同樣地,定子電流閉環模型的參數k1和k2可由其特征方程根的取值設定。
在離散域,定子電流閉環模型和定子磁鏈離散混合模型在不同設計參數下的根軌跡分別如圖8 所示。依據控制理論,閉環極點應位于z平面右半單位圓內并盡可能靠近原點。因此,設計參數取值如下:k1=6.0,k2=15.0,k3=7.0,k4=9.0。
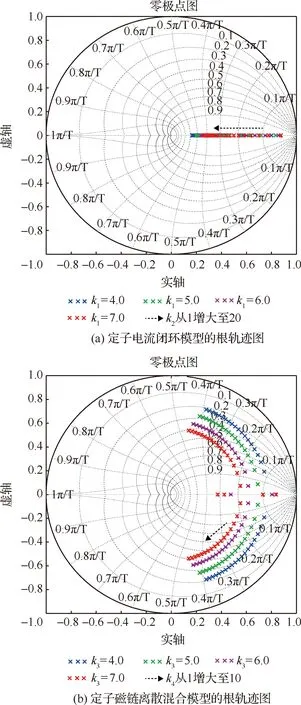
圖8 定子電流閉環模型和定子磁鏈離散混合模型的根軌跡圖Fig.8 Root locus of stator current closed-loop model and stator flux discrete hybrid model
3 RMB-TPC與T-PTC的實驗對比
感應電機驅動系統的實驗平臺如圖9所示,由感應電機、永磁同步電機、驅動模塊、控制模塊及示波器等部分組成。感應電機參數如下:額定功率PN=2.2 kW、額定電壓UN=380 V、額定轉速ωN=2 772 r/min、極對數p=1、定子電阻Rs=2.68 Ω、轉子電阻Rr=2.13 Ω、定轉子電感Ls=Lr=0.283 H、定轉子互感Lm=0.275 H。感應電機由數字信號處理器(型號為TMS320F28335)控制,新型RMB-TPC與傳統T-PTC的執行算法由C語言編寫并在數字信號處理器中運行。永磁同步電機為負載電機,由丹佛斯變頻器控制,其主要作用是為感應電機提供負載轉矩。感應電機的狀態變量由驅動器的數模轉換模塊輸出,并由示波器采集數據,在MATLAB中繪制圖形。
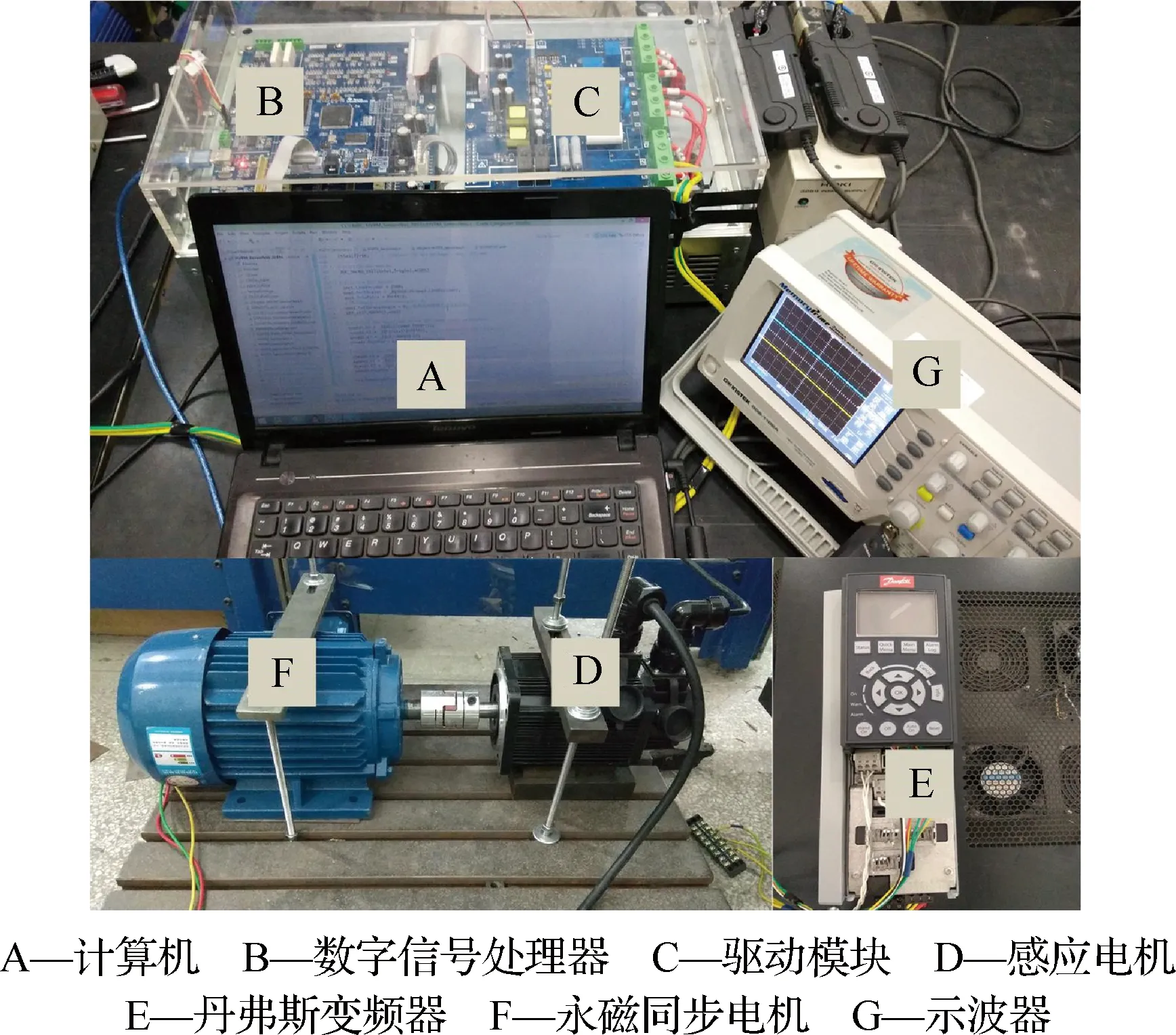
圖9 感應電機驅動系統實物Fig.9 Experimental platform of induction motor
傳統T-PTC及新型RMB-TPC的動態響應如圖10所示,電機轉速指令在1.0 s由額定值2 772 r/min變為-2 772 r/min。從上至下依次為轉速響應、電磁轉矩動態響應、定子磁鏈幅值及定子電流波形。由圖可知,與傳統的T-PTC相比,新型RMB-TPC具有較快的動態性能及較小的定子電流總諧波含量及較小的定子磁鏈幅值脈動。
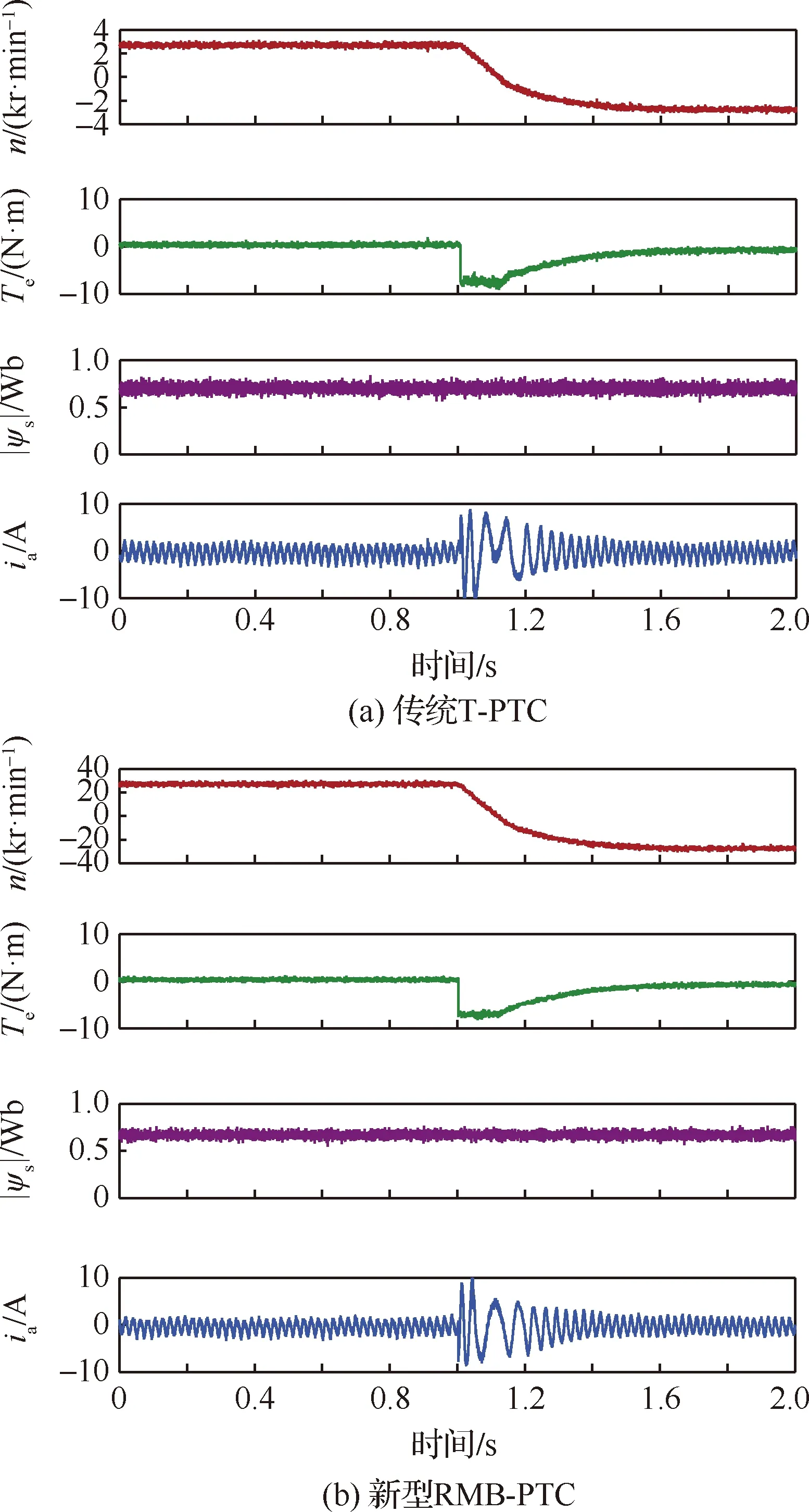
圖10 傳統T-PTC和新型RMB-PTC的動態性能Fig.10 Dynamic performance of traditional T-PTC and new RMB-PTC
傳統T-PTC及新型RMB-TPC的電磁轉矩瞬態響應如圖11所示。感應電機運行于轉矩模式,永磁同步電機運行于轉速模式。感應電機的電磁轉矩指令在4 ms由0 N·m變為額定值7.5 N·m。
在圖11中,從上至下依次為轉子轉速響應、電磁轉矩指令、電磁轉矩瞬態響應及逆變器施加>的電壓矢量。由圖可知,傳統T-PTC的電磁轉矩瞬態響應時間為0.85 ms,而新型RMB-TPC的電磁轉矩瞬態響應時間為0.65 ms。由于新型RMB-TPC精確的電磁轉矩預測模型確保了最優電壓的選擇,因此其具有較快的電磁轉矩瞬態響應。
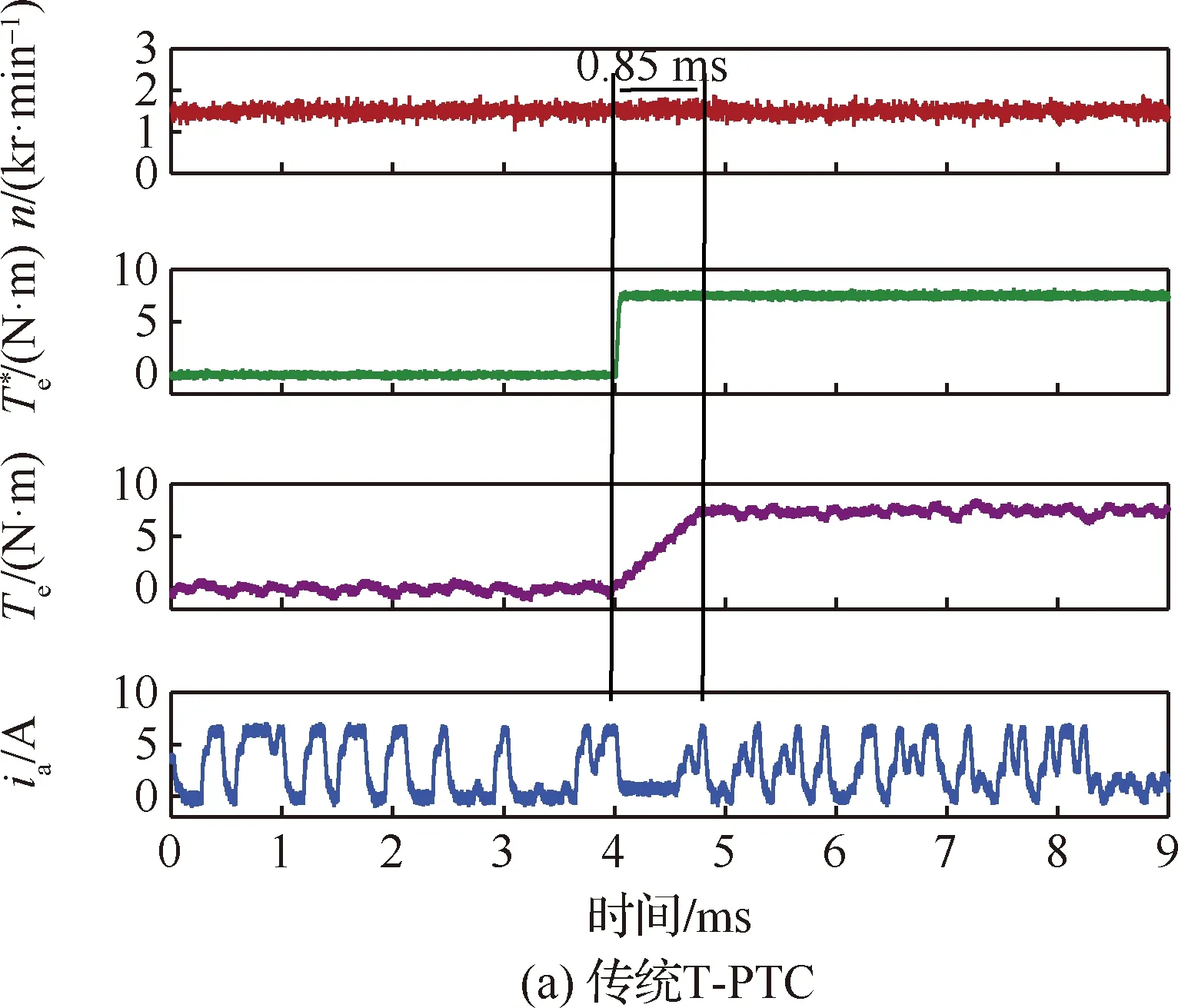
圖11 傳統T-PTC和新型RMB-PTC的電磁轉矩瞬態響應Fig.11 Electromagnetic torque transient response of traditional T-PTC and new RMB-PTC
傳統T-PTC及新型RMB-TPC的穩態性能如圖12所示。從圖可看出,與傳統T-PTC相比,
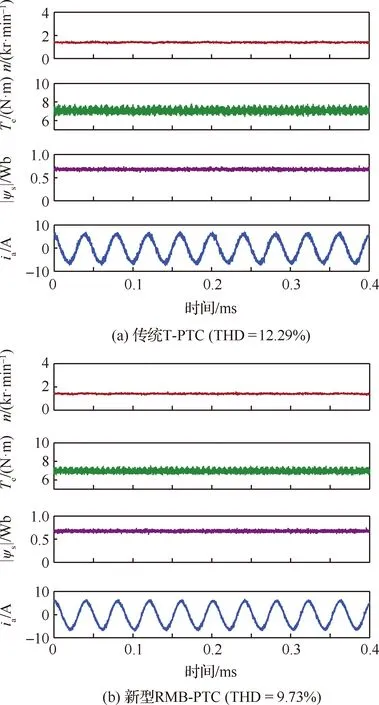
圖12 傳統T-PTC和新型RMB-PTC的穩態性能Fig.12 Steady state performance of traditional T-PTC and new RMB-PTC
新型RMB-TPC具有更小的定子電流總諧波含量以及更小的電磁轉矩脈動。當感應電機轉子速度為1 386 r/min,電磁轉矩為7.5 N·m時,傳統T-PTC的定子電流總諧波含量為12.29%,而新型RMB-TPC的定子電流總諧波含量為9.73%,降低了20.8%。傳統T-PTC的電磁轉矩脈動為1.6 N·m,而新型RMB-TPC的電磁轉矩脈動為1.1 N·m,降低了31.25%。

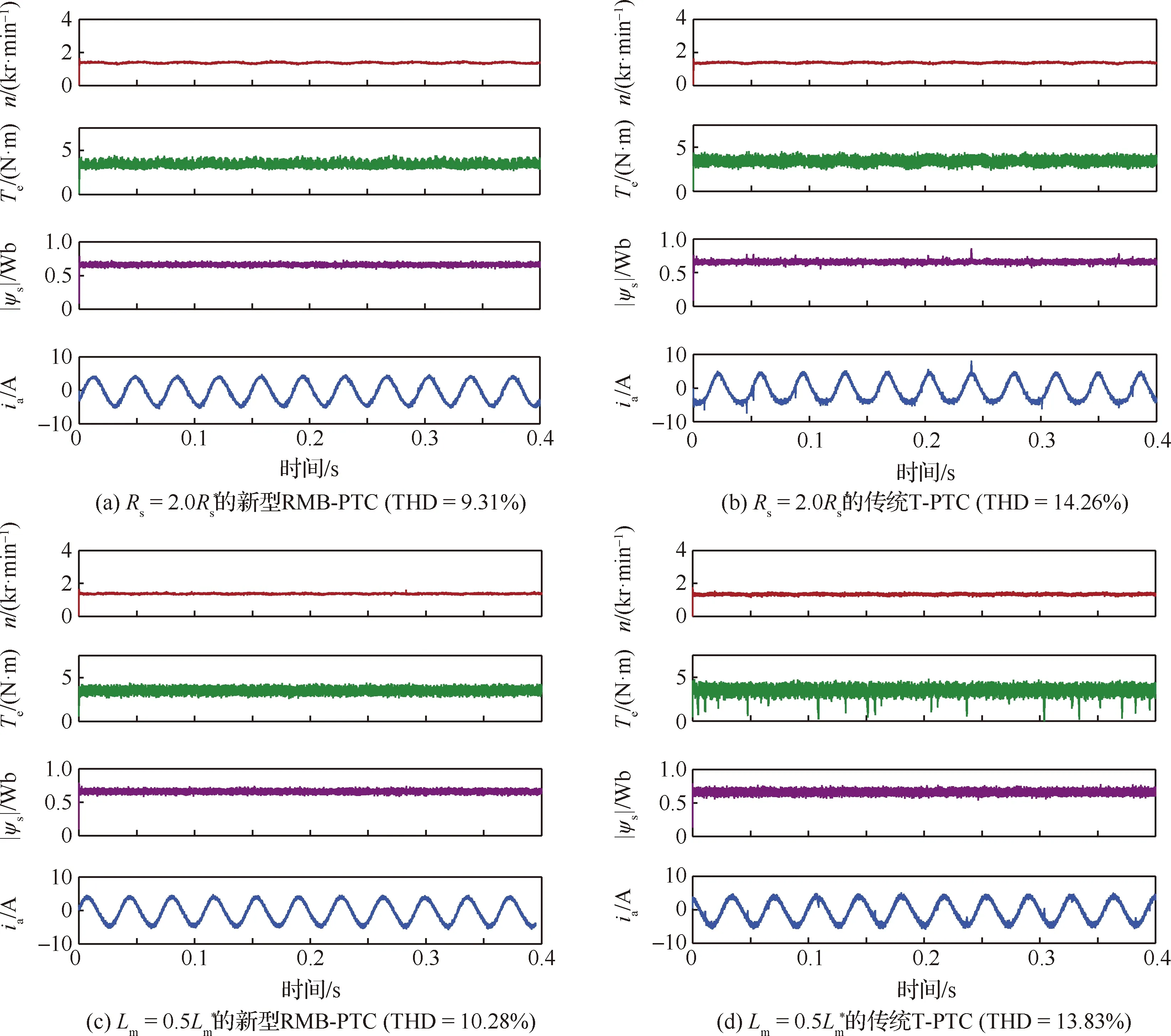
圖13 傳統T-PTC及新型RMB-TPC的魯棒性能分析Fig.13 Robust performance analysis of traditional T-PTC and new RMB-TPC
4 結 論
為解決失配參數導致預測誤差引起控制性能下降的問題,本文提出了一種基于魯棒預測模型的感應電機預測轉矩控制,得出如下結論:
1) 魯棒模型由定子電流閉環模型及定子磁鏈離散混合模型組成,魯棒模型的反饋機制抑制了失配參數引起的預測誤差擾動。
2) 精確的模型預測確保了最優電壓矢量的正確選擇。實驗結果表明,相比于傳統的開環預測模型,基于魯棒模型的預測轉矩控制具有更好的動態性能、穩態性能及魯棒性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
