天然氣水合物多相流檢測工具設計及實驗研究*
2021-10-21 08:09:16鄧江王國榮謝沖周守為鐘林
中山大學學報(自然科學版)(中英文) 2021年5期
鄧江,王國榮,謝沖,周守為,鐘林
1. 西南石油大學機電工程學院,四川成都 610500
2. 中國海洋石油集團有限公司,北京 100010
3. 油氣藏地質及開發工程國家重點實驗室/ 西南石油大學,四川成都 610500
天然氣水合物被認為是繼頁巖氣、致密砂巖氣、煤層氣、油砂等之后最具潛力的清潔能源之一,在我國儲量豐富,具有廣闊開發前景[1]。但是,天然氣水合物在開采過程中復雜的相變及運移規律是目前制約其大規模開發的主要技術瓶頸之一[2]。因此,原位開采環境下天然氣水合物相變及運移規律的檢測、認知手段和理論方法是當前天然氣水合物開發領域的熱點問題。
現有隨鉆測量工具(例如LWD) 在傳統石油天然氣勘探開發過程中扮演了非常重要的角色,具有識別地層巖石物理參數、水合物理化性質[3-4]的能力,但其尚不具備對天然氣水合物開采過程中多相流動特性的檢測功能。目前,借助于粒子圖像測量[5](PIV 技術)、高速攝影測量以及基于單幀單曝光的流場圖像測量等技術[6]在流型[7-10]、相態[11-12]以及空隙率[13-14]等定性研究方面以及噴霧水滴的粒徑、速度方向角檢測[15]、管道煤粉顆粒速度與粒徑分布[16]、射流卷吸流場速度場、加速度場[17]等定量研究方面開展了不少工作。
結合多相流檢測技術,本文設計了一套隨鉆檢測工具,以期建立對非成巖天然氣水合物采掘環境的認識,并對非成巖天然氣水合物破碎多相流管道內的流動特性及參數進行檢測。通過實驗對該裝置的顆粒可見性進行了驗證,并采用一系列圖像處理方法提取了流體中的粒度分布。
1 隨鉆檢測工具設計
1.1 基本原理
利用圖像技術檢測多相流流動特性的基本原理如圖1所示,通過強光照射流場中的一個聚焦平面,采用攝像機記錄下連續兩次或多次曝光的粒子圖像,再通過用圖像分析技術[18-19]處理粒子圖片,計算各點粒子的位移、粒度、流速矢量等一系列參數[20]。
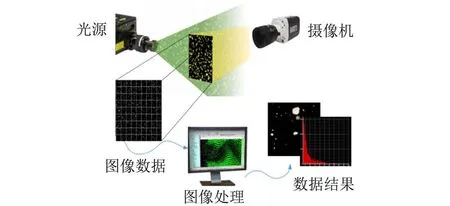
圖1 多相流檢測原理示意圖Fig. 1 Multiphase flow detection principle diagram
天然氣水合物固態流化開采的基本原理是將深水淺層不可控的非成巖天然氣水合物藏通過海底采掘、密閉流化舉升系統變成可控的天然氣水合物資源,從而保證生產安全、減少淺層水合物分解可能帶來的環境風險,達到綠色可控開采的目的[21]。整個開采工藝見圖2,通過鉆頭及噴嘴射流破碎流化天然氣水合物,在泵的作用下,經回收裝置回收流化后的水合物漿體,并在分離器處分離水合物顆粒和泥沙,泥沙回填采集區,水合物顆粒經油管輸送至采集船,整個過程在管道內完成,因此降低了開采帶來的風險。本文的工具安裝在整個工具管串的不同位置,如圖2所示,通過采集天然氣水合物多相流漿體在管道內不同位置的流場圖像與數據,然后通過背景扣除、分割、提取等一系列圖像處理技術,提取流動數據。并結合隨鉆檢測參數來解釋在開采過程中開采管柱內天然氣水合物多相流流動特性及相關設備的運行狀況。
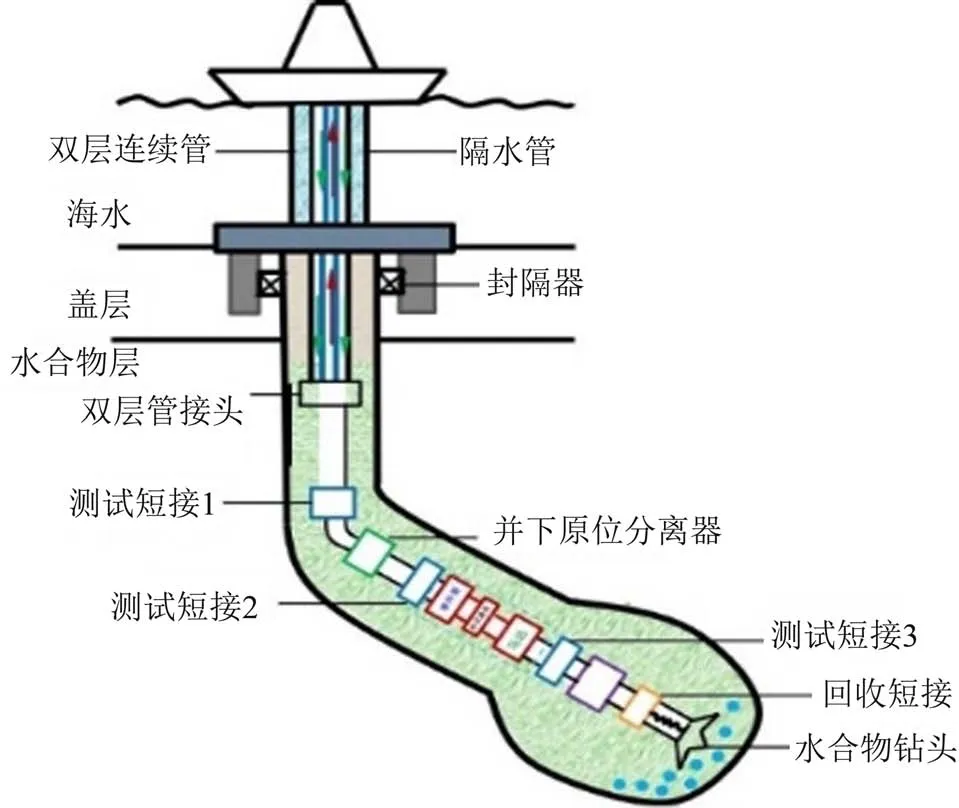
圖2 開采示意圖Fig. 2 Mining diagram
1.2 隨鉆檢測工具結構設計
隨鉆檢測工具安裝在水合物開采工具管串上,分別裝在壓差滑套端、泵總成端、分離器端,實現三位檢測,如圖3所示。工具性能需滿足的技術指標見表1。

圖3 開采工具管串示意圖Fig. 3 Schematic diagram of mining tool string
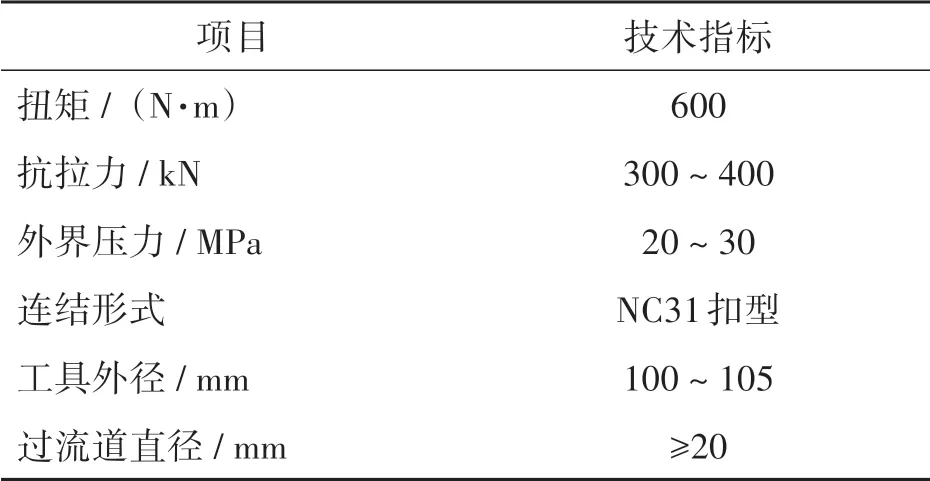
表1 隨鉆檢測工具技術指標Table 1 Detection while drilling tool specifications
隨鉆檢測工具由成像組件和溫度壓力檢測單元兩個功能模塊組成,前者對采掘環境、工況條件、流動狀態進行成像采集記錄,后者對采掘過程中壓力溫度數據進行采集記錄,整體結構如圖4所示。整個裝置為偏心結構,采用模塊化設計,其直徑為105 mm,長710 mm,通過公扣6 和母扣5 與水合物開采工具管串連結。為增大拍攝的范圍,獲取更多流場數據,整個工具搭載兩個成像組件且成120°夾角布置。在光源的照明下,兩個功能模塊同時對水合物破碎多相流的流動狀態進行數據采集。
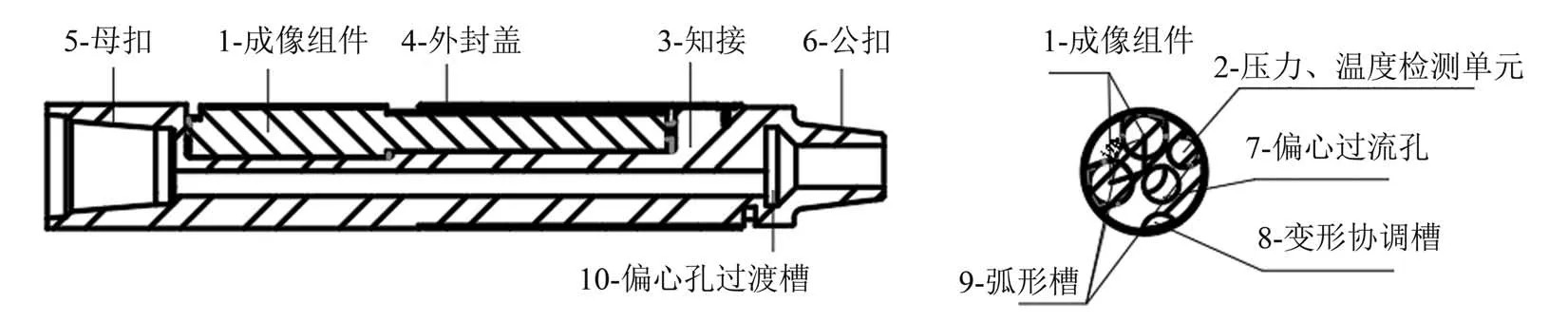
圖4 測試短接結構設計示意圖Fig. 4 Design of test shorting structure
整個工具通過力學仿真軟件和圖5所示的壓力試驗裝置進行了耐壓性及強度驗證,實驗分別在20 ~25 MPa、30 ~35 MPa 的水壓下進行驗證。實驗結果表明:在實驗壓力下裝置無滲液現象,鋁硅玻璃無微裂縫,成像組件滿足壓力密封要求。力學仿真結果如圖6所示,其應力值遠遠低于其材料的屈服強度,滿足強度要求。
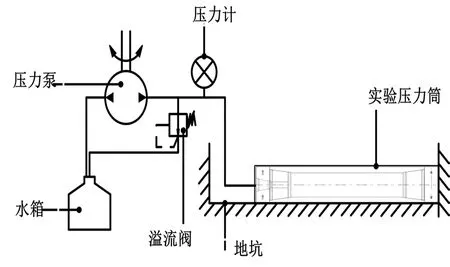
圖5 壓力試驗裝置示意圖Fig. 5 Schematic diagram of pressure test device
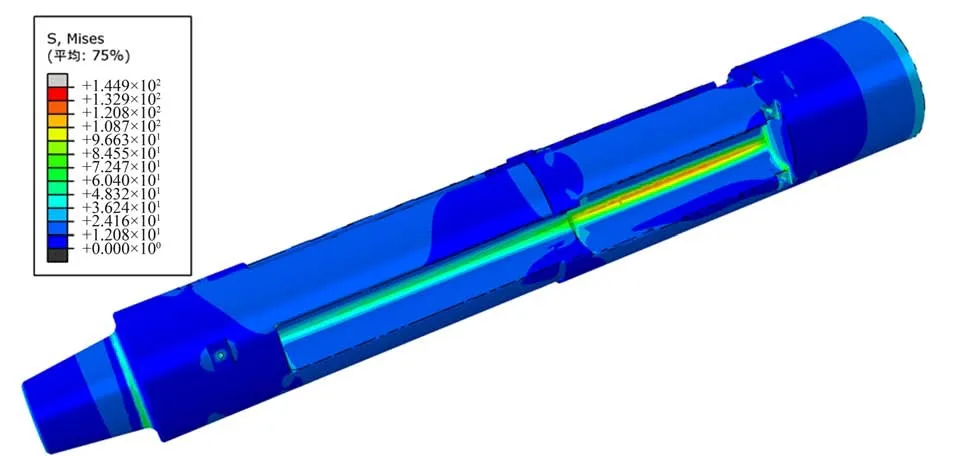
圖6 工具應力分布圖Fig. 6 Tool stress distribution diagram
1.3 隨鉆檢測工具成像組件設計
成像組件作為隨鉆流場檢測的眼睛,其精度直接決定工具的有效性。但隨鉆開采工具管串結構的整體尺寸及開采工況的要求極大的限制了成像組件的設計空間,常規的工業流動成像組件不再適用。因此,本文提出了如圖7所示的成像組件結構,并作為一個獨立的模塊,以便于優化調整。整個裝置密封封裝,并采用透光性較好的鋁硅玻璃2與管道內流場隔開,微型攝像頭采用感光性能好的CCD 微型相機,相機的采集幀率最高為240幀,曝光時間最高10 μs,采集像素最高為4 k。光源作為成像組件中重要的組件之一,其種類及照明方式對于圖像質量至關重要。目前常用的光源有激光、隱失波照明、LED、大功率熒光燈、碘鎢燈等。鑒于工具從開采管柱側向采集環空流動數據的布局模式,選擇采用高強度的LED 光源進行正向照明,為保證流場良好的反射效果,光源對稱分布在微型攝像機兩邊并與安裝槽水平面成一定夾角,對比不同角度下的成像效果,75°夾角時成像效果較好。
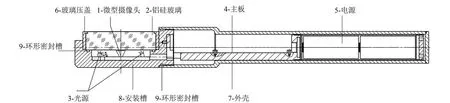
圖7 成像組件結構示意圖Fig. 7 Schematic diagram of imaging component structure
2 圖像處理及實驗研究
2.1 標準顆粒的可見性分析
正向體照明的方式使得LED 照明光錐里所有顆粒都被照亮,照明區域內顆粒漫反射光線都被記錄下來,位于成像焦平面外的顆粒圖像成為背景噪音,降低了整個圖像的信噪比和圖像質量,有時還會造成位于像平面上的顆粒隱匿。因此,保證顆粒的可見性、降低圖像背景噪音、提高信噪比是圖像粒度尺寸檢測的前提。有研究表明[22],在焦平面上顆粒的強度分布和離焦平面上的強度分布近似為二維高斯分布,如圖8所示。且離焦平面越遠,灰度值越小,圖像上顆粒像素集越大,粒徑檢測值越失真。要保證在背景光下顆粒的可見性,在焦顆粒的光強需顯著高于背景強度[23],即高信噪比。而圖像信噪比主要受顆粒大小、濃度以及照明設備和成像設備的影響[24]。為此,實驗采集了實際工況中高體積分數和常規體積分數的流動灰度分布圖像(圖9)。圖9中,顆粒灰度值分布主要集中在高頻部分,整體呈峰狀;而代表背景分布的灰度值主要集中在低頻部分,顆粒信息散亂分布在低頻信息中,兩者具有顯著的強度區分性;且體積分數越低,顆粒信息可見性越明顯。由此可知,該工況的天然氣水合物多相流具有良好的可見性,為進一步研究提供了可能。
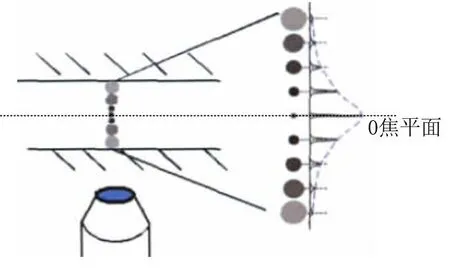
圖8 離焦平面顆粒成像分布[22]Fig. 8 Defocus plane particle imaging distribution[22]
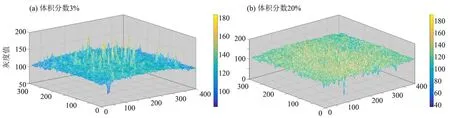
圖9 灰度分布圖Fig. 9 Gray distribution map
2.2 流動工況下的顆粒圖像識別分析
2.2.1 實驗裝置為獲取不同工況的流動瞬時圖像,并對顆粒識別能力進行評估,建立了固液兩相流實驗系統(圖10)。實驗平臺由水合物多相流配置輸送控制單元、圖像視頻采集單元、圖像視頻處理單元三部分組成。在水合物多相流配送輸送控制單元的控制下,砂配比裝置投送的水合物破碎顆粒替代樣與泥沙泵泵入主管道內的清水混合成不同工況的模擬水合物漿體,依次流經透明管、成像組件、流量計、取樣口等裝置,最后流回水箱。混合物在流經圖像視頻采集單元時,通過高速攝像機以及成像組件拍攝管道內的流動過程,并保存到計算機終端;最后,用圖像視頻處理單元進行處理并提取特征參數。根據天然氣水合物開采工具管串的設備參數以及試采取樣結果,實驗選取粒徑大小為70 目的石英砂作為天然氣水合物顆粒破碎物替代樣,漿體排量為45 m3/h,漿體體積分數分為3%、5%、10% 三種不同工況。實驗采用取樣口進行取樣,并通過過濾、干燥處理,其結果見圖11。
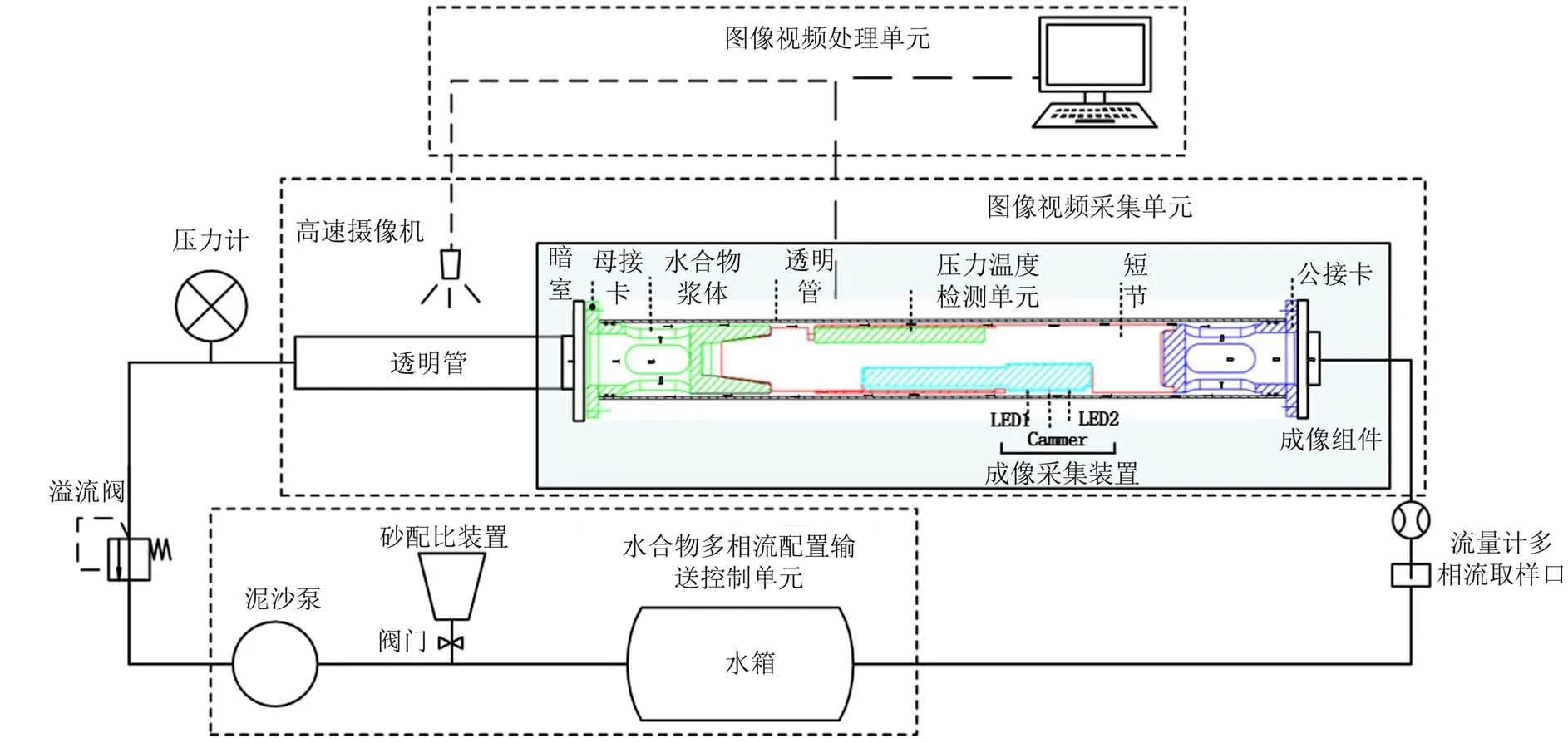
圖10 實驗檢測裝置示意圖Fig. 10 Schematic of experimental detection device
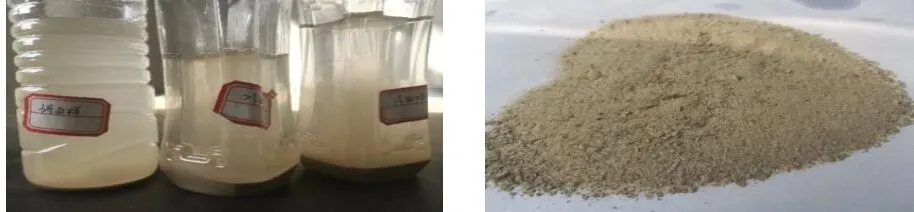
圖11 取樣結果Fig. 11 Sampling results
2.2.2 圖像處理與粒度尺寸提取去除背景的影響,準確、完整的提取反映顆粒真實尺寸的像素集,對粒度檢測精度至關重要。本文采用平均背景扣除和采集背景扣除兩種方式去除背景的影響,提取位于焦平面上的顆粒,其方法主要是從原圖中扣除通過不同方式提取的背景灰度分布圖像。對圖9 (a) 分別進行采集背景扣除與平均背景扣除,得到圖12。通過對比圖12 的(a) 和(b) 發現,平均背景扣除效果優于采集背景扣除,能夠過濾掉大部分的背景信息,而不丟失顆粒的強度信息。
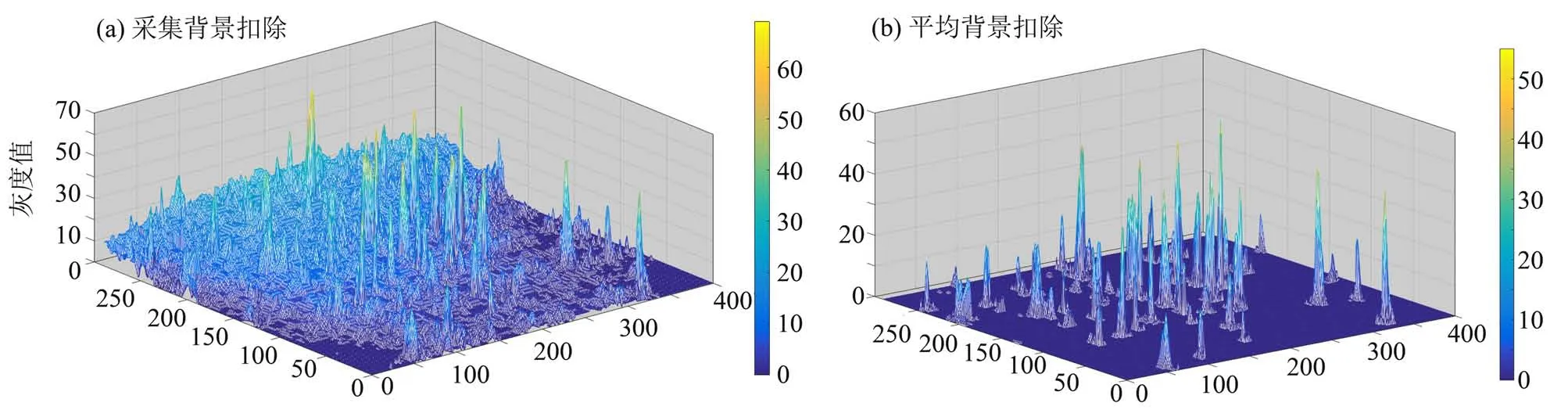
圖12 背景處理結果Fig. 12 Background processing results
平均背景扣除處理后,還存在部分景深范圍內的背景顆粒未完全剔除,該范圍內的顆粒其灰度值強度高于平均背景水平,低于焦平面上顆粒的灰度值強度,在圖像上像素集分布偏大,會引起粒徑檢測產生較大的誤差。本文采用閾值基剪切的方法,過濾相關顆粒[22,25]。通過提取圖像中的灰度值分布,設定灰度強度閾值I0以區分兩者,低于I0者視為背景處理,置為0,高于I0者保留。通過多次處理觀察,I0取12 時具有很好的處理效果,能夠祛除誤差較大的顆粒。
通過圖像處理的方式檢測粒度信息,本質上是對粒度像素以及像素個數的綜合處理,通過圖13 的圖像處理流程提取和劃分位于在焦平面上的顆粒像素集。采用平均背景扣除去除背景影響,采用中值濾波抑制噪聲,經閾值基剪切處理后的圖像,再經過Canny 算法和形態學方法處理,得到在焦顆粒在圖像上的投影像素集,如圖14所示。

圖13 圖像處理流程Fig. 13 Image processing flow
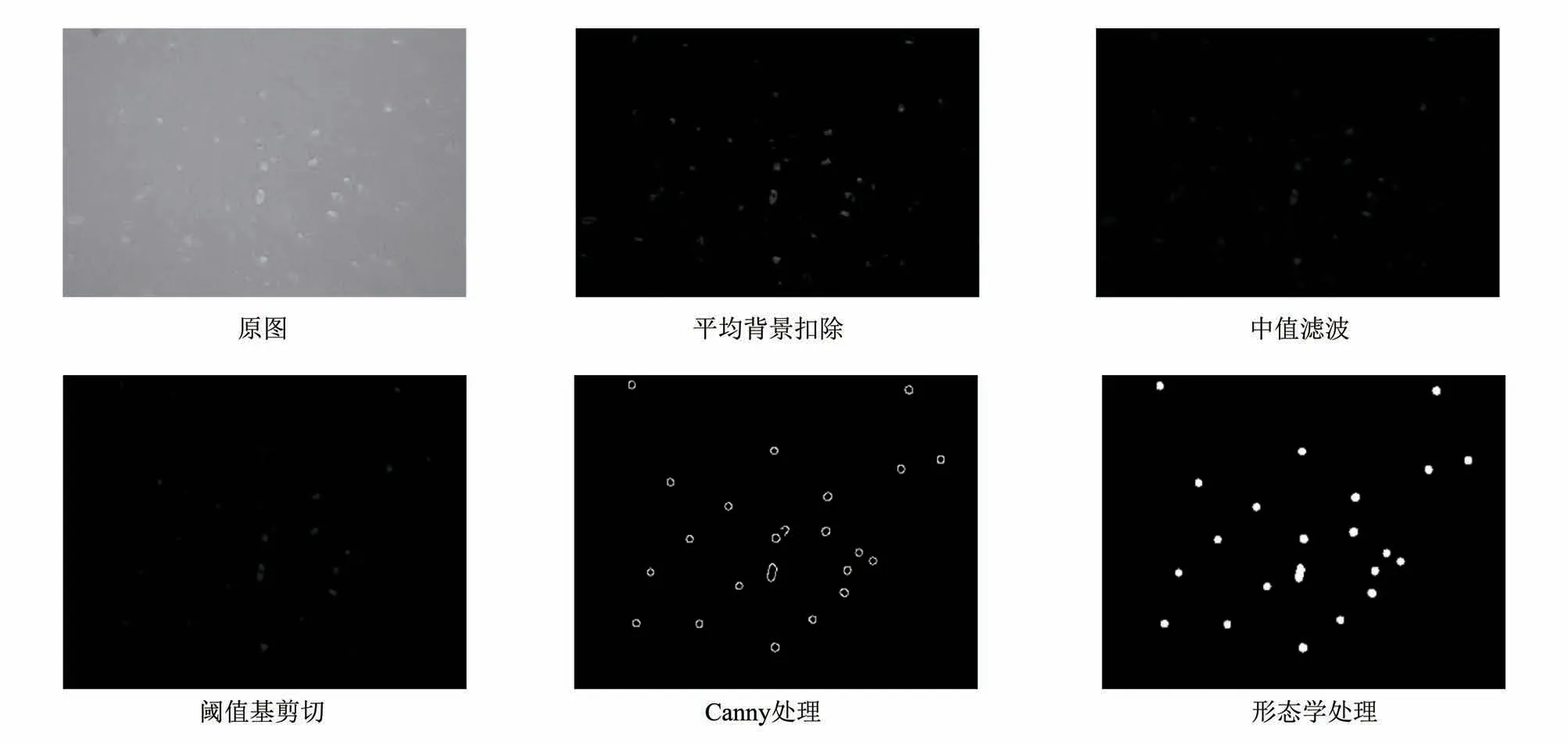
圖14 圖像處理過程中顆粒在圖像上的投影Fig. 14 The projection of particles on an image during image processing
2.3 粒度數據分析
采用圖13 所述的圖像處理方式對三組工況的實驗數據進行了粒度數據提取,其處理實例見表2。本文共處理了12 900 張圖像,提取445 904 個顆粒數據,并采用標準分劃板對像素空間分辨率進行標定,標定后K(物理長度與像素長度的比值) 值大小為0. 017 6 mm/pixel,并按圓形顆粒等效直徑的方式求取每個顆粒的等效直徑。三組工況取樣的樣品通過沉淀、過濾,干燥處理后,通過激光粒度儀對樣品粒度進行了檢測,其統計結果見表3。由表3 可知,其平均粒徑誤差范圍均在20% 以內,與實際流體在均勻穩定流動狀態下的粒徑分布信息趨勢吻合。三組粒度分布曲線見圖15,從整體上看,其圖像處理分布與取樣結果分布趨勢一致。但其圖像處理結果相較于取樣處理結果整體分布較小,尤其在小體積分數和高體積分數兩組中表現明顯,其可能的原因是圖像處理算法對粒徑處理造成的影響,包括圖像背景處理的過扣除和圖像的過分割,另一個原因可能是該工況下流場分布不均勻導致圖像中流場數據采集不全。
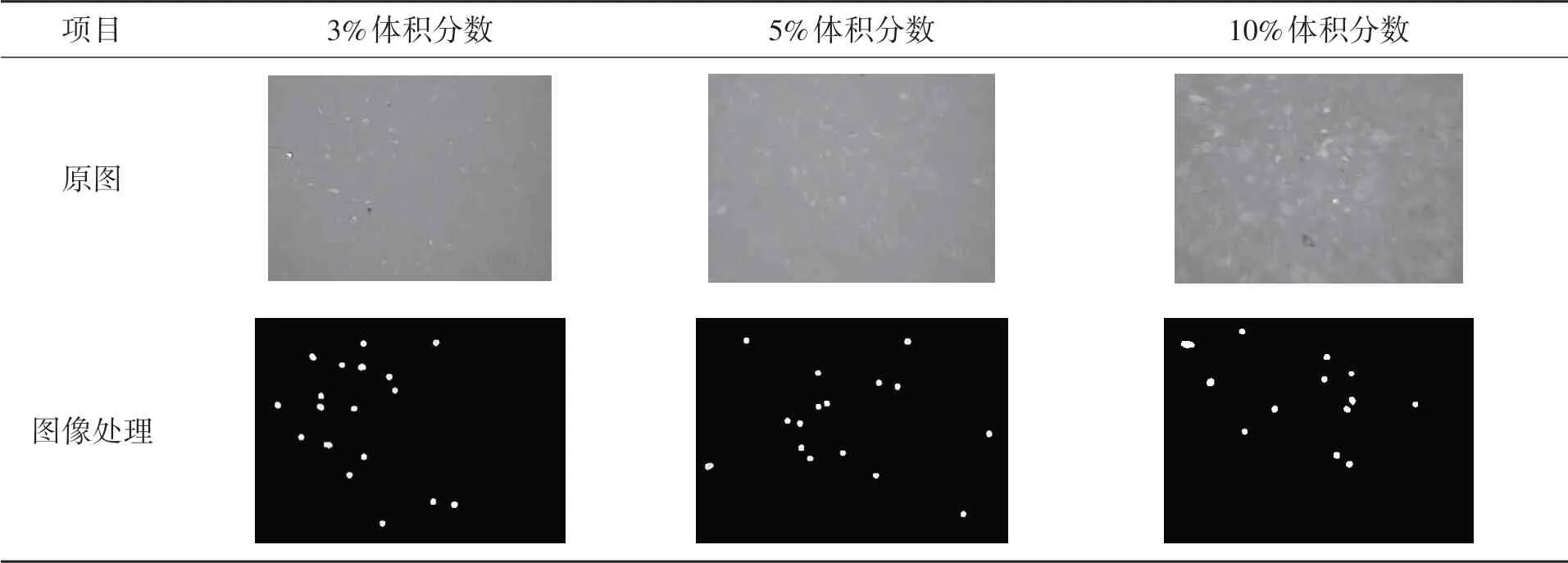
表2 處理實例Table 2 Processing example
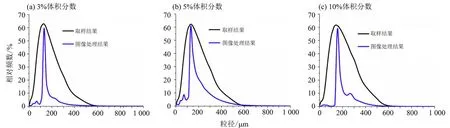
圖15 粒徑分布Fig. 15 Particle size distribution
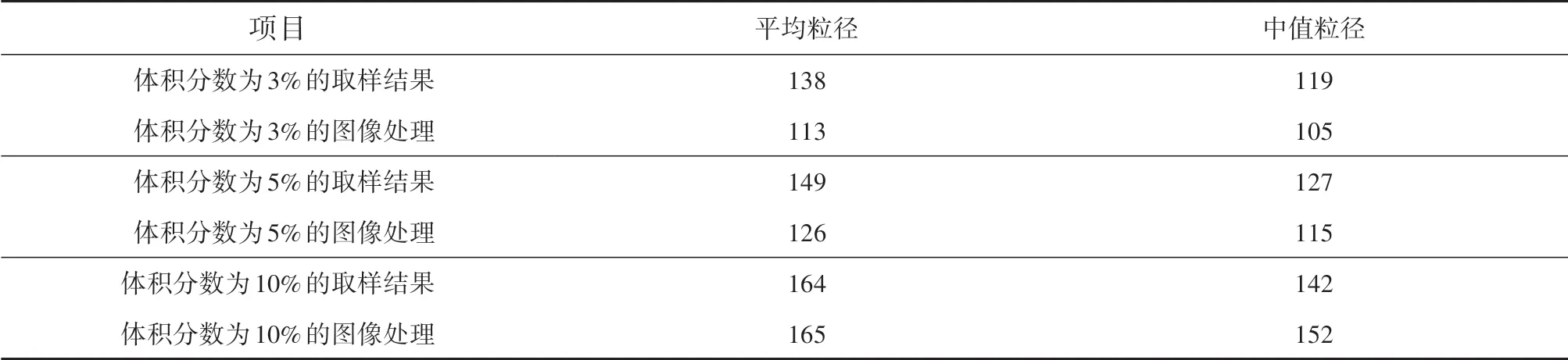
表3 粒徑數據統計Table 3 Particle size statistics μm
3 結 論
本文設計了一種隨鉆天然氣水合物多相流檢測工具,建立了對水合物破碎粒徑進行在線檢測和識別的方法。并就其強度、耐壓性、密封性、成像可見性等進行了驗證。驗證結果表明:強度、耐壓性、密封性均滿足設計要求,且體積分數越低,顆粒信息可見性越明顯。此外,通過實驗模擬隨鉆原位采集天然氣水合物多相流動狀態,可以獲得水合物破碎顆粒的粒徑分布。從試驗數據來看,三組不同工況下提取的平均值、中值粒徑均與實驗取樣結果大體一致,能夠滿足檢測的要求,證明了裝置在粒徑為70 目左右、體積分數小于或等于10%、流動速度在45 m3/h 的采集工況下的可行性。但是在其粒度分布上還存在較大差異,主要表現在其圖像處理的分布結果整體窄于取樣分布結果。因此,本文將在以下方面開展進一步研究:
1) 多相流在焦平面顆粒的準確提取及圖像處理算法,包括高濃度、高速度工況。
2) 圖像處理算法對粒徑檢測精度的影響及提高手段。
3) 多局部檢測數據整合與多相流流場整體參數之間映射的關系及適用條件。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
