基于小波包分解和共空間模式方法的腦電運動想象分類方法*
2021-10-21 00:41:44王美娥徐艷華
生物醫學工程研究 2021年3期
王美娥, 徐艷華
(1.河南省省立醫院神經內科,鄭州 450000 ;2.中原科技學院,鄭州 450000)
1 引 言
腦機接口技術是通過采集患者腦電波信號來控制外部輔助設備,以幫助患者復健或者實現生活自理[1]。腦機接口技術開發應用過程中,最大的難題是如何提高腦電運動想象分類,即如何準確分辨患者發出的腦電波信號中所蘊含的控制指令[2]。只有明確腦電運動,才能控制外部設備更好地為患者服務,否則一旦解析錯誤,將極易給患者帶來危險。
針對上述情況,關于腦電運動想象分類問題的研究得到很多學者的重視。程時偉等[3]將卷積神經網絡用于腦電運動信號識別與分類,實現人與運行機器人之間的相互傳導,控制機器人幫助肢體運動障礙患者的日常生活和康復訓練。張進等[4]組合兩類分類器,分類不同狀態下腦電信號類型,控制機械手臂作業和運動。趙杰等[5]利用奇異譜分析方法進行腦電信號偽跡去除和節律提取,以支持向量機作為分類器,分析孤獨癥兒童腦電信號,以利于治療。
基于前人研究經驗,本研究提出基于小波包分解和共空間模式方法的腦電運動想象分類方法。該方法以小波包分解算法提取腦電波信號特征,以共空間模式構建分類器,分類腦電運動想象指令,控制外部設備行動,幫助癱瘓患者在一定程度實現行動自由。
2 材料與方法
2.1 實驗材料
以3 cm×4 cm中低頻通用電極及腦電波采集裝置作為電極帽,研究了一種運動想象方法。用一臺智能小車控制四類運動想象任務的分類正確率。讓實驗對象依次進行腦電運動想象控制智能小推車。為確保實驗結果的一致性,在同一智能車上進行多組實驗樣本的采集。
腦電運動是通過腦機接口技術向外部設備發射患者腦電波信號指令,實現輔助設備控制的過程。在該過程中,患者根據想要實現的行為,想象該部位所需要的運動,但此時只有大腦皮層被激活,而肢體并未產生任何活動,被激活的大腦皮層會根據患者想象產生不同類型的腦電信號。因此,采集患者的腦電波信號,即可從中提取出患者想要發出的指令信息,完成對外部設備的控制[6]。
2.2 腦電運動信號采集
腦電運動信號即腦電波信號,其采集是實現腦電運動信號分類的首個環節。腦電波信號以腦電圖的形式顯示出來[7]。腦電波信號的采集有無創和有創兩種方式。無創采集方式,即將電極布置在大腦皮層外部采集腦電波信號。該方式有統一的電極放置標準[8],標準中電極名稱、腦部位、編號間的對應關系見表1。
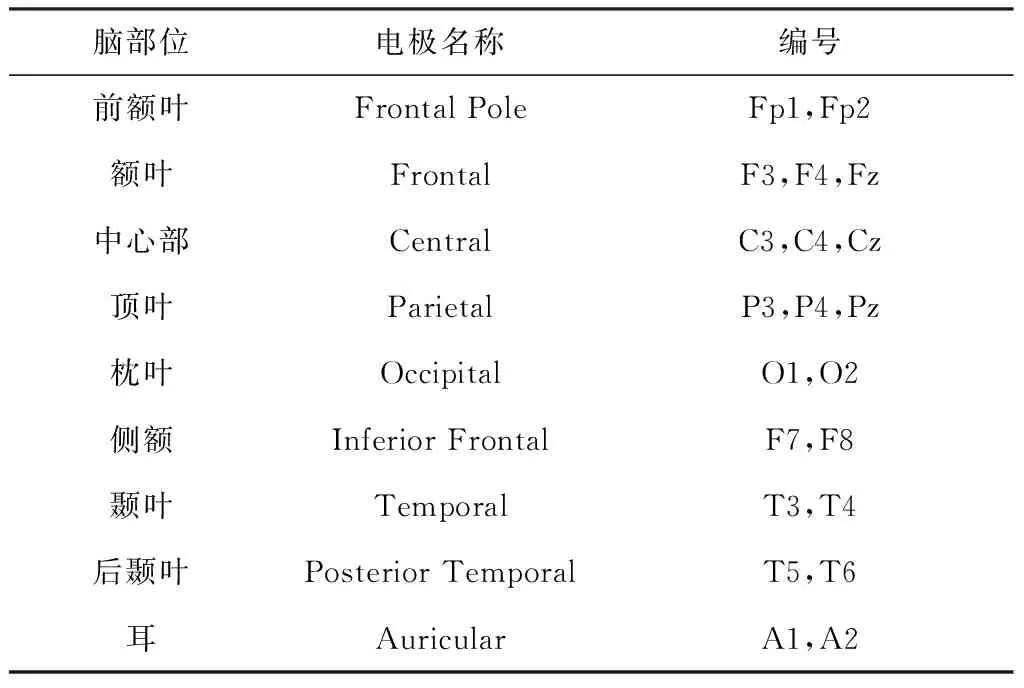
表1 電極名稱、腦部位、編號間的對應關系表
有創采集方式,即通過外科手術將檢測電極植入電腦皮層,采集腦電波信號。該采集方式由于零距離接觸到大腦皮層神經元,因此,采集到的腦電波信號質量更高,但是該方式需要外科手術介入,會對患者造成二次傷害,且長時間地植入電極,有可能存在被感染的風險,因此,該方式更適用于全身癱瘓或完全喪失行動能力的重癥患者。
2.3 腦電運動信號去噪
腦電運動信號在采集過程中易受體內外噪聲干擾,且難以避免,只能采集后再處理。根據噪聲來源的不同,來自體外的噪聲可以通過讓患者的頭皮保持清爽干凈或者讓患者剪短頭發,使電極與頭皮接觸更親密,以提高采集的信號質量,減少噪聲干擾[9]。而對于來自患者體內的內源性噪聲,則主要利用獨立成分分析去除。
獨立成分分析(independent component analysis,ICA)是將腦電運動信號分解為若干個獨立分量,然后對每個獨立分量評判獨立程度,選出符合標準的獨立分量,即噪聲[10-11]。ICA描述如下:
x=A·s
(1)
式中,x={x1,x2,...,xn}代表觀測信號矢量;A代表位置混合矩陣;s={s1,s2,...,xm}代表源信號矢量。
獨立成分分析,即從x中分離隱藏在里面的s,即尋找可以實現二者之間分離的矩陣W,即
W=y·s
(2)
式中,y代表采集到的觀測信號,基于獨立成分分析的腦電運動信號去噪具體過程如下:
步驟1:將電極采集到的觀測腦電運動信號X中心化處理,即計算所有腦電運動信號的均值,并讓均值=0;
步驟2:將觀測腦電運動信號再白化,得到Z;
步驟3:設定獨立分量的數量m以及迭代的次數,并設置初始迭代次數等于1;
步驟4:隨機選擇一個初始權向量Wp;
步驟5:令
(3)
式中,E{}代表均值運算;g代表非線性函數;g′代表非線性函數的導數;T代表腦電運動信號采集頻率[12]。
步驟6:歸一化Wp,得到Wp′:
(4)
步驟7:判斷Wp′是否收斂,若不收斂,則回到步驟5;否則繼續下一步:
步驟8:令迭代次數p′=p+1;
步驟9:判斷p′是否≤設定獨立分量的數量m,若小于等于,則回到步驟4;否則,繼續下一步:
步驟10:重構去噪后的腦電運動信號。
2.4 腦電運動信號特征提取
腦電運動信號特征提取是整個分類方法中最難的環節,也是本研究的重點環節[13]。特征提取的準確性和全面性直接關系到分類結果的準確性。為此,本研究采用小波包分解和共空間模式方法,分別提取腦電運動信號的時域特征和空間域特征[14]。
2.4.1小波變換提取腦電運動信號的時域特征 首先,設腦電運動信號為x(n);其次對x(n)離散化,得到f(n);然后對f(n) 有限層分解,即:
(5)
式中,L代表小波分解有限層數;AL代表最底層的逼近分量;Dj代表不同層數所對應的細節分量。j代表頻率分辨率[15]。信號四層小波分解見圖1,cDL,cDL-1,……,cD2,cD1為每層的小波系數。
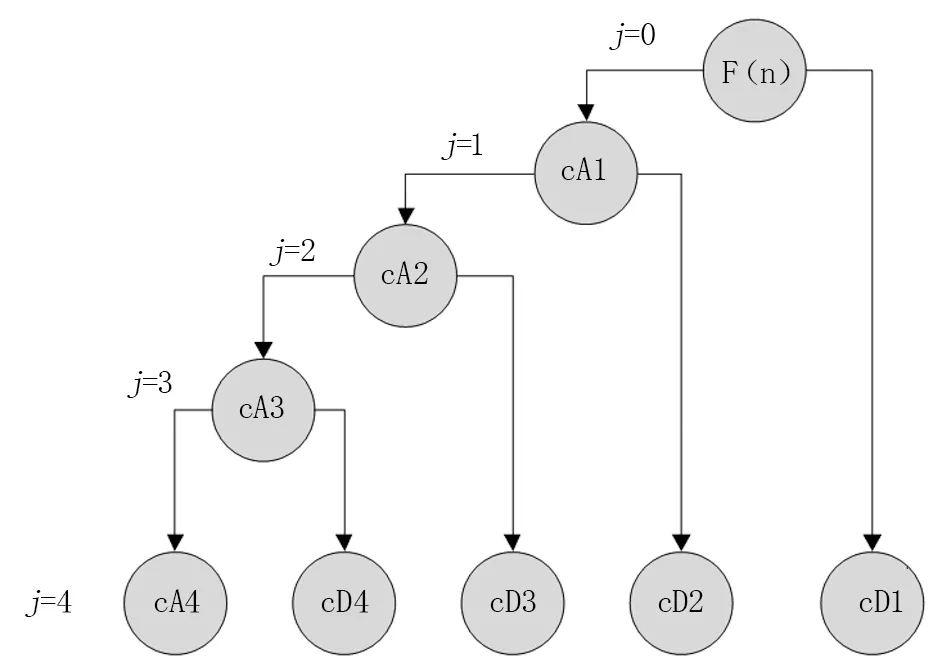
圖1 信號四層小波分解示意圖
最后,計算cDL,cDL-1,……,cD2,cD1絕對值的平均值、標準差和能量均值,以此作為腦電運動信號頻域特征[16]。
2.4.2共空間模式提取腦電運動信號空間域特征
步驟1:選取腦電運動信號構成N×T的矩陣Yi,其中,i代表腦電運動信號種類;N為腦電導聯數,計算協方差矩陣Zi,即
(6)
(7)


(8)
式中,Λ代表特征值矩陣;Β代表特征向量矩陣。
步驟4:構建白化矩陣P。
(9)
步驟5:針對種類1,通過上述變換,協方差矩陣變為如下形式:
(10)
式中,n代表腦電運動信號特征數量。
上述公式中,將類1的協方差歸為一類,其余腦電運動信號類別視為另一類,步驟6:構建空間濾波器F。
F=[F1,F2]
(11)
(12)
式中,f為S1,S1共同的特征向量矩陣;f1代表前m個特征向量組成矩陣;f2代表其余特征向量組成的矩陣。
步驟7:對Yi空間濾波,得到投影矩陣Ri。
Ri=F·Yi
(13)
步驟8:對Ri平方運算,得到信號能量值var(Ri2)。
步驟9:對var(Ri2)對數運算,得到空間域特征量Qi。
(14)
步驟10:同上,得到各種模式下的腦電運動信號特征數據[17]。
2.5 腦電運動想象分類實現
基于上述得到的各種模式下的腦電運動信號特征數據,構建分類器,實現腦電運動想象分類[18]。
以決策樹算法為基礎,一個決策樹對應一種腦電運動信號類別,最后完成所有類別的決策樹構建,形成完整的隨機森林分類器[19]。因此,決策樹的構建是分類實現的關鍵。決策樹構建基本流程見圖2。

圖2 決策樹構建基本流程
將腦電運動信號特征數據輸入到分類器當中,即可實現腦電運動想象分類[20]。
3 結果與分析
為了驗證本研究方法的分類效果,以一名受試者做出的運動想象以及本方法給出的分類結果為標準,進行準確性驗證。
3.1 電極布置
按照2.2無創方式采集受試者腦電波。選擇3 cm×4 cm中低頻通用電極貼片,按表1布置方案縫制一個電極帽,作為腦電波采集裝置。電極帽示意圖見圖3。
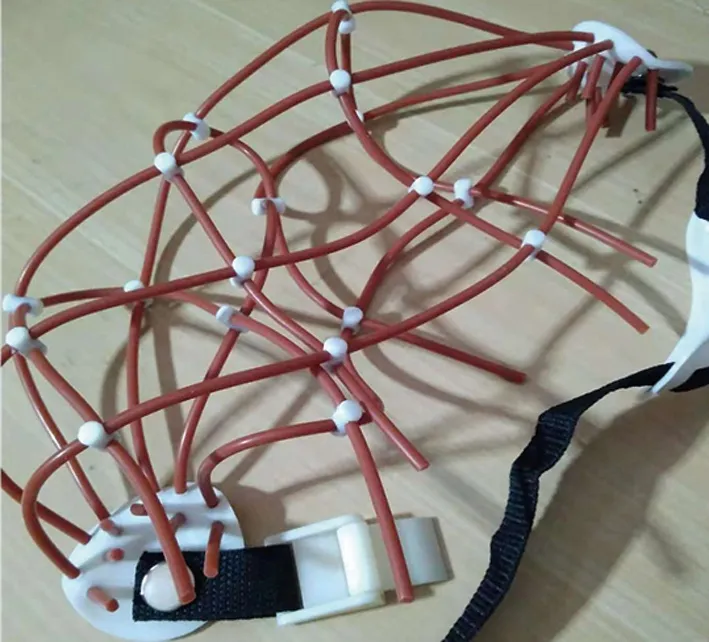
圖3 電極帽示意圖
3.2 實驗設計
首先讓受試者戴上電極帽,并端坐在椅子上,保持安靜,然后給出2~3 s的準備時間,讓受試者做好測試準備。屏幕上提示功能鍵亮起,正式進入測試環節,同時屏幕上會顯示出一個“+”字方塊,每個方塊代表了一個腦電運動想象,最后每隔3 s會亮起一個方塊,受試者通過亮起提示想象四種不同部位的運行,即想象左手、右手、舌以及腳,直至第12 s結束。在采集期間,每結束一種腦電波采集,將腦電波信號傳輸到與之相連的計算機,實時顯示腦電圖數據。腦電波數據采集現場見圖4。

圖4 腦電波數據采集現場
采集到的腦電圖數據示意圖見圖5。
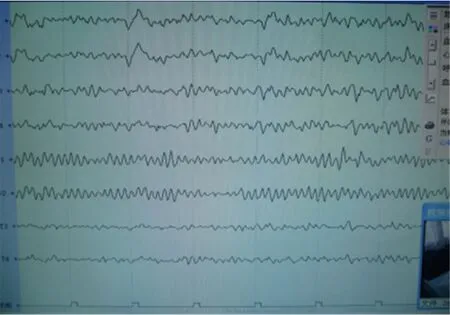
圖5 腦電圖數據示意圖
3.3 智能小車控制
以控制智能小車是否與腦電波數據吻合作為四類運動想象任務分類準確性的驗證對象。控制命令與想象運動的對應關系,見表2。
表2 控制命令與想象運動的對應關系
讓受試者依次做出腦電運動想象,控制智能小車在圖6場景下做出一系列開始→前進→左拐→前進→右拐→前進→右拐→后退→前進→左拐→前進→結束的相應運動。
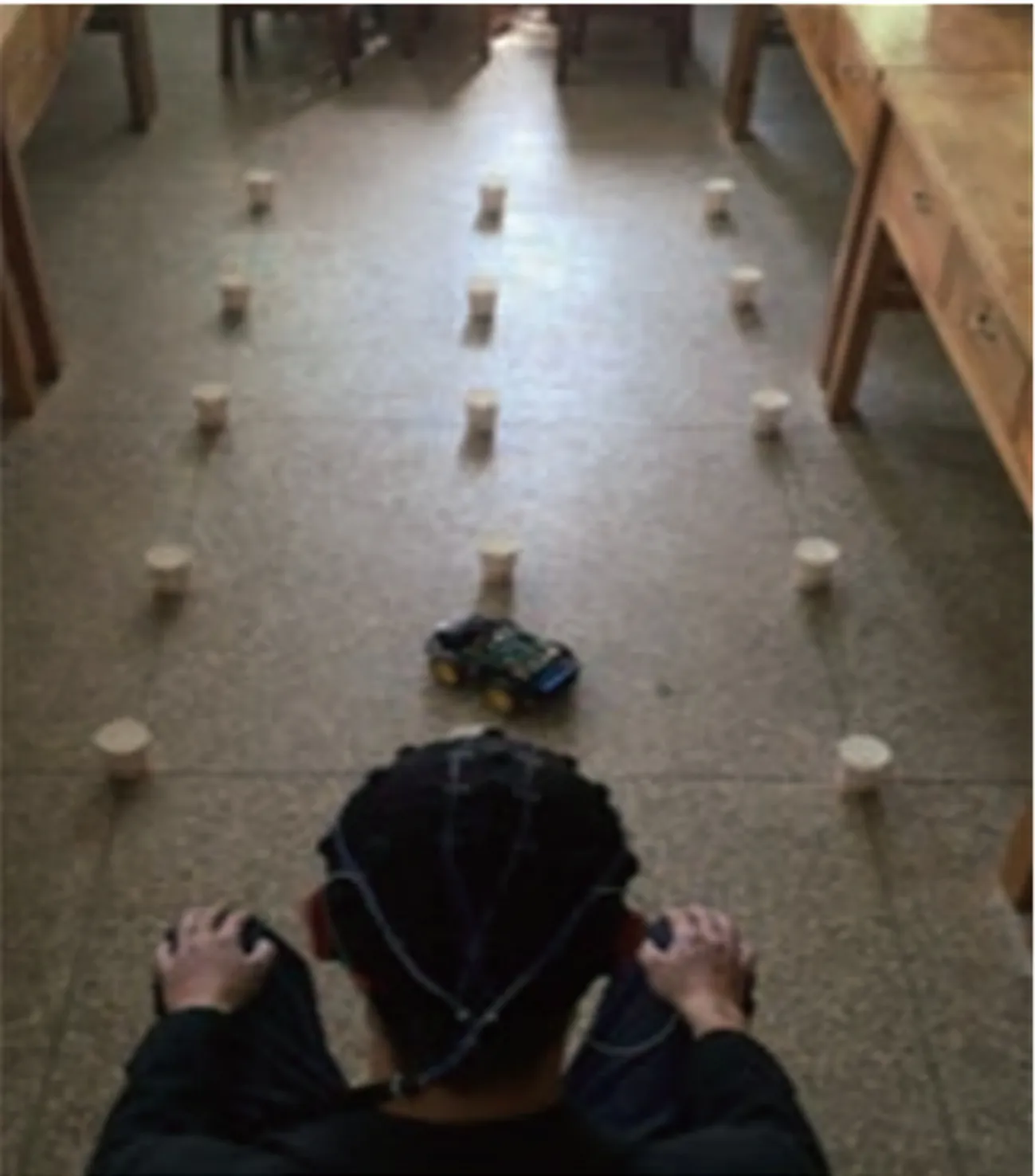
圖6 智能小車運動場景
3.4 分類效果分析
以受試者腦電運動想象與控制小車運行的對應關系為分類效果驗證標準,一旦小車運動與受試者腦電運動想象存在分歧,即認為分類出現錯誤。在相同實驗條件下,利用基于卷積神經網絡的分類方法、基于奇異譜分析的分類方法以及基于組合分類器的分類方法做出腦電運動想象(舌→左手→舌→右手→舌→右手→腳→舌→左手→舌)。受試者腦電運動想象與小車運行對應關系見表3。
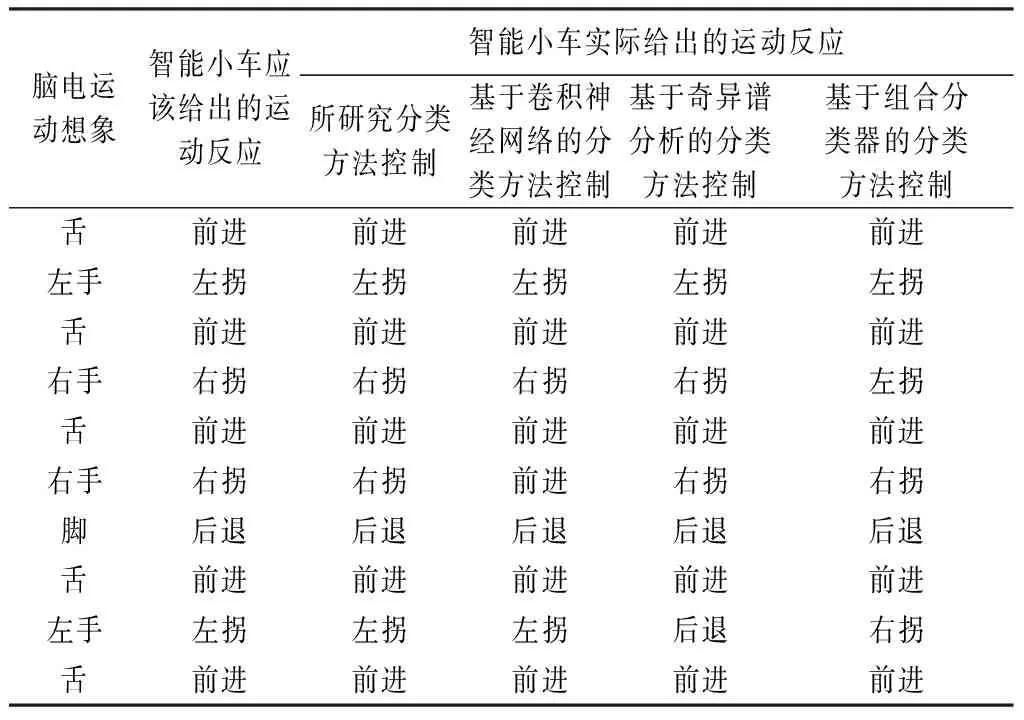
表3 受試者腦電運動想象與小車運行對應關系表
由表3可知,當腦電運動想象反應右手時,基于卷積神經網絡的分類方法為前進;當腦電運動想象反應是左手時,基于奇異譜分析的分類方法為后退;當腦電運動想象反應是左手時,基于組合分類器的分類方法為右拐。在這三種方法控制下,智能小車給出的運動反應均出現誤差,表明分類有誤。而本研究分類方法控制的智能小車給出的運動反應與智能小車實際應該給出的運動反應完全一致,證明本研究方法達到了預期的分類結果。
4 結論
綜上所述,腦電運動想象的出現可在一定程度上幫助殘疾人群恢復一定的行動力,但由于存在腦電想象分類不準確,使外部設備給出的反應與腦電波類型存在偏差。針對該問題,本研究提出了一種基于小波包分解和共空間模式方法的腦電運動想象分類方法,該方法結合小波包分解和共空間模式兩種方法,提取了更全面的腦電波特征,從而提高分類結果的準確性。最終經過實驗測試驗證本研究方法的分類質量更高。
猜你喜歡
科普童話·學霸日記(2021年4期)2021-09-05 04:28:51
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生作文(低年級適用)(2019年12期)2020-01-18 07:50:36
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年11期)2018-08-04 03:25:42
中國化妝品(2018年6期)2018-07-09 03:12:42
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
