中型無人直升機電動舵機控制器設計與實現(xiàn)
2021-10-26 05:54:02李晨毓祖家奎劉佳暉高尚文
機械與電子 2021年10期
李晨毓,祖家奎,劉佳暉,高尚文
(南京航空航天大學自動化學院,江蘇 南京 211106)
0 引言
當前,無人直升機作為無人機家族的重要成員之一,具有的獨特飛行能力和應用價值,使其成為廣泛研究的對象[1]。無人直升機獨特的飛行性能與其獨特的操作機構(gòu)密不可分,對于常規(guī)單旋翼帶尾槳的直升機而言,其操縱機構(gòu)包括自動傾斜器、尾槳和發(fā)動機3部分。舵機是對這些操縱機構(gòu)進行直接控制的重要設備,其性能的優(yōu)劣直接影響無人直升機的飛行品質(zhì)。一款合適的電動舵機有利于提高無人直升機飛行控制性能[2-3],因此,開展針對特定型號無人直升機使用的電動舵機控制器的研究具有重要的現(xiàn)實工程價值。
本文結(jié)合項目需求,針對一款最大起飛重量為700 kg中型無人直升機開展電動舵機控制器的設計實現(xiàn)。對該無人直升機對舵機的特殊需求進行了分析,提出了“DSP+FPGA+功率驅(qū)動”的硬件設計方案[4-6]。
1 需求分析與技術方案
1.1 需求與指標
本文旨在設計滿足DWK700中型無人直升機使用的電動舵機系統(tǒng)。該系統(tǒng)包括舵機控制器1臺、直線舵機3臺以及旋轉(zhuǎn)舵機2臺。該無人直升機的尾槳和油門分別由2個舵機操控,通過鋼索結(jié)構(gòu)連接,連接關系如圖1a所示;自動傾斜器采用傳統(tǒng)十字盤結(jié)構(gòu),由3個直線舵機進行操控,每個舵機獨立負責1路變距通道,舵機和連接器之間采用拉桿、球頭和鋼索連接方式,連接關系如圖1b所示。

圖1 尾槳、自動傾斜器舵機的連接
根據(jù)該型無人直升機對執(zhí)行機構(gòu)的技術需求,提出電動舵回路的主要性能指標如表1所示。

表1 電動舵回路性能指標
針對舵機控制器的設計需求,主要從軟件和硬件2個方面進行分析。參考市場上成熟的舵機控制系統(tǒng),采用DSP+FPGA的硬件架構(gòu),其控制器內(nèi)部強弱電同時存在,在設計時要求做好強弱電分離;各部分核心部件模塊全部采用標準化和模塊化設計,需要注重部件的通用性和接口的可互換性。軟件設計方面,為保證軟件的質(zhì)量和可維護性,其設計時應遵循軟件設計規(guī)范,采用模塊化的軟件結(jié)構(gòu);軟件運行發(fā)生故障時,為確保系統(tǒng)能夠恢復到故障前狀態(tài),需對程序中一些關鍵信息采用余度設計。
1.2 硬件設計方案
本文采用DSP + FPGA作為主處理器,同時控制5路舵機,舵機控制器的硬件整體結(jié)構(gòu)如圖2所示。硬件部分可分為:主控單元、功率驅(qū)動電路、信號測量電路和電源電路4部分。其中每一路舵機單獨占用,硬件設計基本相同。

圖2 舵機控制器結(jié)構(gòu)
主控單元主要負責舵機控制算法的實現(xiàn),為了使處理器具有快速計算能力、實現(xiàn)負載的算法,在選取DSP作為主控芯片的基礎上,搭配FPGA來輔助采集傳感器數(shù)據(jù),減輕了DSP不必要的計算量。二者協(xié)同配合向驅(qū)動電路發(fā)出PWM控制信號,從而驅(qū)動舵機輸出指定的位移或角度。測量電路對舵機的電流和位置進行實時監(jiān)控,并反饋到主控單元,確保舵機控制的精確性。針對DSP+FPGA硬件架構(gòu)內(nèi)強弱電同時存在的特殊性,電源電路采取隔離供電的形式分別給傳感器、驅(qū)動電路和主控單元提供電源。
1.3 軟件設計方案
作為控制算法實現(xiàn)的載體,舵機控制器軟件是整個系統(tǒng)設計的重要組成部分,其設計遵循了模塊化和層次化原則。舵機控制器軟件的整體架構(gòu)如圖3所示。

圖3 舵機控制器軟件架構(gòu)
根據(jù)分層化原則,舵機控制器軟件分為4層:硬件設備層、設備驅(qū)動層、業(yè)務功能層和應用管理層。模塊化和層次化的設計原則使各模塊之間相互獨立,既便于調(diào)試和修改,又使程序更具拓展性和可讀性。
2 對象建模與優(yōu)化
2.1 對象建模
電動舵回路的建模主要分為4部分:無刷電機模型、功率驅(qū)動模塊、減速傳動機構(gòu)和位置傳感器。從重要性的角度出發(fā),本文主要對電動舵機系統(tǒng)采用的永磁無刷直流電機進行建模分析。
本文以微分方程和傳遞函數(shù)2種形式建立無刷電機的模型。微分方程能完整體現(xiàn)模型的內(nèi)部物理學關系,可以獲取所有內(nèi)部狀態(tài)信號;傳遞函數(shù)能用簡潔的方式體現(xiàn)模型輸入輸出之間的關系,在進行控制回路分析和控制器設計時比微分方程便利很多。Y型連接的無刷電機線電壓方程為
(1)
uAB、uBC、uCA為電機三相線電壓;R為三相繞組電阻;L為三相繞組自感;M為繞組間的互感;iA、iB、iC為電機三相相電流;eA、eB、eC為三相繞組反電動勢。
無刷直流電機空載時的傳遞函數(shù)為
(2)
負載轉(zhuǎn)矩和電機速度之間的傳遞函數(shù)為
(3)
KT為電機轉(zhuǎn)矩系數(shù);TL為負載轉(zhuǎn)矩;Ω為電機機械角速度;J為轉(zhuǎn)子轉(zhuǎn)動慣量;Bv為粘性阻尼系數(shù);Ud為直流母線電壓;ra為繞組線電阻;ke為線反電勢系數(shù);La為繞組等效線電感。
無刷電機在電壓和負載轉(zhuǎn)矩共同作用下的傳遞函數(shù)模型為
Ω(s)=Gu(s)Ud(s)+GL(s)TL(s)=
(4)
綜合可得,旋轉(zhuǎn)舵機的整體傳遞函數(shù)為
(5)
直線舵機傳遞函數(shù)為
(6)
kpwm為功率驅(qū)動器的放大倍數(shù);i為減速比;Kf為位置傳感器系數(shù)。
2.2 辨識優(yōu)化
電動舵機在運動過程中,受到外界負載擾動、內(nèi)部摩擦力等因素的影響,舵機的精度、穩(wěn)定性以及動靜態(tài)特性也會產(chǎn)生相應變化[7]。通過理論建模只能大致確定舵機模型的結(jié)構(gòu),想要更進一步確定具體參數(shù),需進行以實際測量數(shù)據(jù)為基礎的舵機模型參數(shù)辨識[8]。
本文以旋轉(zhuǎn)舵機為例,用最小二乘法進行參數(shù)辨識,其迭代公式為
(7)

由式(5)可知,舵旋轉(zhuǎn)舵機的整體傳遞函數(shù)均為三階模型,對其離散化后可得

(8)
并且,其對應的差分方程為
y(k)+a1y(k-1)+a2y(k-2)+a3y(k-3)=
b1u(k-1)+b2u(k-2)+b3u(k-3)
(9)
本文結(jié)合旋轉(zhuǎn)舵機整體傳遞函數(shù)與其相關參數(shù)理論值,忽略與理論參考值相差不大的參數(shù),對轉(zhuǎn)自轉(zhuǎn)動慣量J和線反電動勢系數(shù)ke進行參數(shù)辨識。
通過理論計算得ra=0.562 Ω,La=0.444×10-3H,J=78×10-7kg·m2,kpwm=7.3,KT=0.047 9 N·m/A,ke=0.047 9 V/(rad·s-1),Bv=0.008 N·m/(rad·s-1),i=300,Kf=27.6。將其代入式(5)中得旋轉(zhuǎn)舵機傳遞函數(shù)為
(10)
旋轉(zhuǎn)舵機對應的差分方程系數(shù)辨識結(jié)果為a1=-1.139,a2=0.138 9,a3=1.838×10-5,b1=0.001 1,b2=0.002,b3=1.068×10-3,其對應的傳遞函數(shù)為
(11)
將不需要辨識的參數(shù)代入理論模型與實際辨識出模型比較,得出旋轉(zhuǎn)舵機待辨識參數(shù)J=8.3×10-6kg·m2,ke=0.042 V/(rad·s-1)。
通過比較待辨識系統(tǒng)和辨識出的模型在同一信號源下的輸出結(jié)果,驗證辨識模型的精確度。給定頻率為4 Hz、幅值為2°正弦信號,得到旋轉(zhuǎn)舵機實際位置輸出和辨識出模型的位置輸出曲線如圖4所示。從曲線可以看出,辨識出模型的位置輸出與舵機實際輸出曲線基本吻合,表明辨識出的傳遞函數(shù)精確度較高。

圖4 旋轉(zhuǎn)舵機實際位置輸出與模型位置輸出比較
3 控制方法研究
PID控制作為一種經(jīng)典的控制算法,在工程領域廣泛使用[9]。該算法對模型精度要求不是太高,參數(shù)整定較為容易且工程上也易于實現(xiàn),但在舵機控制系統(tǒng)應用中存在負載動態(tài)變化時控制品質(zhì)較差、小信號指令的控制精度不足和快速性與穩(wěn)定性相矛盾等問題[10]。從控制對象存在的模型誤差和未知干擾出發(fā),結(jié)合工程的可實現(xiàn)度,本文將引入自抗擾控制器(ADRC)來提高系統(tǒng)的控制品質(zhì),其精髓在于它將影響被控對象的內(nèi)外部干擾統(tǒng)一歸結(jié)為系統(tǒng)總干擾并對其進行估算,在控制器輸出量中對干擾進行補償[11-13]。本文通過引入帶寬的概念將ADRC改造成線性自抗擾控制器(LADRC),其結(jié)構(gòu)如圖5所示,減少了ADRC的設計參數(shù)[14]。
在傳統(tǒng)的體育課堂中,都是教師引導課堂,學生配合著老師的指令完成體育動作,比如做健身操,各種活動前的鍛煉等等。這種方法可能會導致學生對體育課堂失去興趣,從而認為體育課枯燥無味,沒有了學習的動力。因此,在體育教學中教師需要根據(jù)學生的實際情況,結(jié)合學生感興趣的內(nèi)容來改進自己的教學方法,體育課堂上需要創(chuàng)新來激發(fā)學生學習喜歡體育的興趣,從而使他們自己主動的去鍛煉。
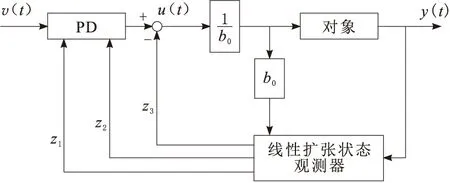
圖5 線性自抗擾控制器結(jié)構(gòu)
本文采用三閉環(huán)串級控制結(jié)構(gòu),借鑒直流電機調(diào)速系統(tǒng)設計,電流環(huán)和速度環(huán)采用PI控制,位置環(huán)采用P控制。針對舵機負載動態(tài)變化的不確定性和小信號指令跟蹤效果差這2類突出問題,在位置環(huán)引入線性自抗擾控制進行解決。
經(jīng)設計,P控制下的位置環(huán)閉環(huán)傳遞函數(shù)為
(12)
Kw為速度環(huán)閉環(huán)放大倍數(shù);Tw為等效慣性環(huán)節(jié)的時間常數(shù);kfθ為位置環(huán)反饋系數(shù)。為使系統(tǒng)的阻尼比為1,kpp取1.25。
自抗擾控制器下的擴張狀態(tài)觀測器為
(13)

經(jīng)擴張狀態(tài)觀測器補償后,控制律為
u0=KP(r-z1)+KD(-z2)
(14)
z1、z2分別為舵機輸出角度和電機輸出角速度的觀測值。系統(tǒng)閉環(huán)傳遞函數(shù)為
(15)
將設計的線性自抗擾控制器和PID控制器進行對比。額定負載狀態(tài)下,分別給定小信號2°和大信號20°的階躍信號,系統(tǒng)響應如圖6和圖7所示。2°階躍信號下,LADRC上升時間為0.025 s;20°階躍信號下,LADRC上升時間為0.03 s。當系統(tǒng)處于穩(wěn)態(tài)時,LADRC無誤差。采用PID控制時,系統(tǒng)到達穩(wěn)態(tài)后始終存在誤差。通過對比,可以得出無論大小信號,LADRC在應對外界負載時,系統(tǒng)性能都優(yōu)于PID。

圖6 2°階躍信號下負載響應曲線

圖7 20°階躍信號下負載響應曲線
4 測試與驗證
4.1 測試方案
電動舵機在實際使用中,需要和飛控計算機連接,實時響應飛控計算機的控制指令,并回饋舵機的位置狀態(tài)信息。因此,在測試過程中,需設計舵機測試軟件來代替飛控計算機進行控制指令的發(fā)送。直升機在飛行過程中,會受到鉸鏈力矩的影響,舵機會時刻處在帶載運行過程,而這個載荷是動態(tài)變化的。為了模擬這一實際運行狀態(tài),還需要設計負載加載試驗臺,提供可調(diào)負載。結(jié)合以上敘述,測試環(huán)境包括舵機測試軟件、舵機控制器、電動舵機和負載加載臺,如圖8所示。

圖8 測試驗證的結(jié)構(gòu)
基于Qt開發(fā)的舵機測試軟件,其可以與舵控器進行通信、實時顯示舵機運行狀態(tài)信息、向舵控器發(fā)送舵機位置指令、提供特定信號源和數(shù)據(jù)記錄等功能。
加載試驗臺主要作用是固定舵機,提供大小不同的負載。加載臺上設置有專門的螺栓孔,采用相應螺栓即可對舵機進行固定。大小不同的負載采用液壓桿來實現(xiàn),液壓桿設置多種不同大小的力,滿足不同負載條件下舵機測試,可以充分測試舵機的負載性能。
電動舵機整體測試環(huán)境如圖9所示。舵機測試軟件發(fā)送指令信號,同時記錄設定位置信號和反饋信號。測試完成后,對采集數(shù)據(jù)進行分析。

圖9 舵機測試環(huán)境
4.2 測試結(jié)果
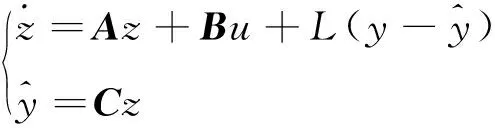
通過舵機測試軟件發(fā)送舵機指令信號,分別給定30°、20 mm的階躍信號,得到額定載荷情況下設定位置曲線和實際位置曲線如圖10所示。
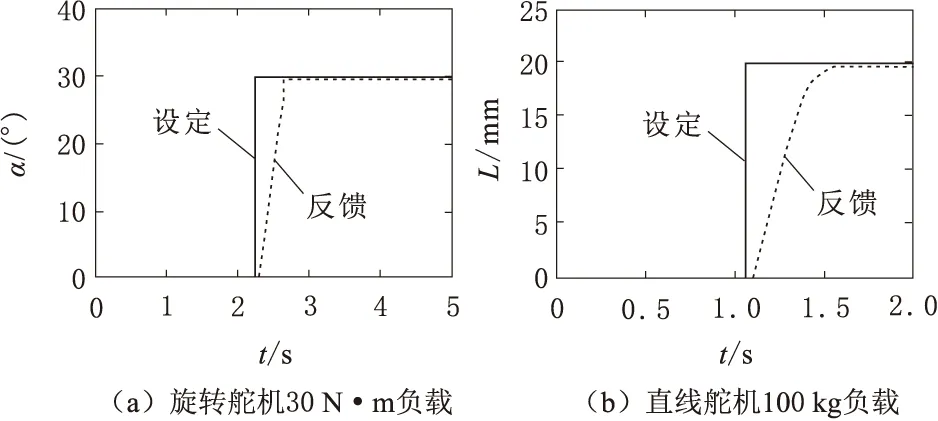
圖10 30°、20 mm 階躍信號
從階躍響應曲線分析可以得出,額定載荷運行狀態(tài)下,旋轉(zhuǎn)舵機上升時間為500 ms,超調(diào)量為1.81%,穩(wěn)態(tài)誤差為0.11°;直線舵機上升時間為305 ms,超調(diào)量為1.23%,穩(wěn)態(tài)誤差為0.13 mm。
分別給定頻率為4 Hz,幅值為2°、2 mm 正弦信號,得到給定位置曲線和實際位置曲線如圖11所示。
圖11 2°、2 mm 正弦信號
從正弦響應曲線分析可以得出,額定載荷運行狀態(tài)下,旋轉(zhuǎn)舵機跟蹤誤差為0.11°,相移為16°;直線舵機跟蹤誤差為0.5 mm,相移為31°,滿足實際使用要求。
4.3 工程試飛
目前,本文所研究的電動舵回路已經(jīng)在DWK700無人直升機上進行安裝,進行機上飛行測試。舵控器在DWK700無人直升機的實際安裝如圖12所示。

圖12 機上舵機和控制器安裝
在DWK700中型無人直升機航線飛行過程中,無人直升機進行了懸停、懸停回轉(zhuǎn)和著陸等動作,過程中狀態(tài)平穩(wěn)。
同時,在試飛過程中,飛行控制計算機分別記錄了俯仰舵機、滾轉(zhuǎn)舵機、總距舵機和尾槳舵機在無人直升機起飛、小機動飛行、著陸等不同狀態(tài)下的控制設定位置和反饋位置,如圖13所示。

圖13 電動舵機位置曲線
從圖13中可看出,電動舵機跟蹤性能良好、控制精度高,可滿足無人直升機實際使用。
5 結(jié)束語
本文針對DWK700中型無人直升機對電動舵機的特殊需求,設計了一種以“DSP + FPGA”為主控單元的舵機控制器,來提高該無人直升機的控制性能。全文從需求分析、軟硬件設計、建模與辨識優(yōu)化和控制方法研究等多方面入手,提供一套詳細的設計方案。經(jīng)模擬測試和工程試飛表明,該舵控系統(tǒng)在穩(wěn)定運行的基礎上,解決了負載動態(tài)變化時控制品質(zhì)較差和小信號指令的控制精度不足等問題,證實了該方案的可行性,取得了較好的工程應用效果,達到預期研究目標。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
