基于5G技術的變電站無人機巡檢安全控制策略
2021-10-27 13:24:36鐘昱銘周泳庭
通信電源技術 2021年10期
李 游,范 琪,鐘昱銘,周泳庭
(1.國網湖南省電力有限公司 檢修公司,湖南 長沙 410004;2.變電智能運檢國網湖南省電力有限公司實驗室,湖南 長沙 410004)
0 引 言
無人機巡檢已在架空輸電線路巡視方面得到廣泛應用,大寬帶、多角度以及高效率等優勢,可快捷高效地提供變電站一次設備巡視和帶電檢測結果,解決高空變電設備運維巡視“盲區”問題[1]。變電站內電磁場環境復雜、設備布局緊密,因此對無人機飛行安全性和穩定性要求是變電行業推廣無人機巡檢首要考慮的問題[2]。目前,變電無人機智能巡檢技術逐步在變電站運維中得到廣泛應用,巡檢系統應用過程中,存在異常情況不能立即中斷任務和電池待機時間較短等問題,不符合遠程控制無人機巡檢安全作業要求[3]。為進一步完善變電站無人機智能巡檢系統功能,提升遠程控制無人機巡檢的安全性能,需增加無人機異常情況下的應急處理手段和技術規范標準,以提高無人機在變電站巡檢中的安全可靠性。
近年,為提高巡檢效率,消除變電站人工巡檢的視覺盲區和短板,5G無人機技術在電力系統的巡檢作業研究成為熱點。劉沖等人分析當前輸電線路無人機巡檢存在的運行維護力度低、通信技術落后以及操控距離受限等問題,設計了輸電線路無人機巡檢平臺構架、無人機VR巡檢和無人機智能巡檢,優化巡檢任務,進一步提升了輸電線路巡檢自動化水平[4]。李瞻宇等人闡述了東莞聯通與東莞供電局基于5G無人機巡檢技術合作及研究,提出無人機電力巡檢方案,實現了巡檢數據一鍵采集,可大幅度提高作業效率[5]。張帆等人提出了輸電線路旋翼無人機多源定位智慧換電平臺,使無人機幾乎不中斷地長時間高空作業,同時應用新型的驅動轉向結構,提高了無人機的運動能力和運行速度[6]。上述研究中,多應用在輸電線路的巡檢運維工作中,而基于5G技術無人機巡檢在變電站上的應用暫未有相關研究,遠程巡檢安全控制技術方面的研究更少。變電站無人機巡檢技術方案及遠程安全控制技術的研究,能大幅提高變電站運維工作效率,提升巡檢安全系數,保障變電設備的安全穩定運行[7,8]。
變電站無人機巡檢作業中,基于5G通信技術超低時延和超大帶寬的特性,提出在無人機巡檢安全控制系統內制定異常智能應急懸停、任務中斷原路返回以及低電量就地迫降等安全控制策略,可有效實現無人機的遠程應急控制,保證變電站復雜環境下無人機巡檢安全,提高了作業安全系數和巡檢工作效率。
1 變電站無人機巡檢系統
變電站無人機巡檢系統包含巡檢控制系統、巡檢裝備、通信設備以及供電系統。供電系統分為220 V交流電供電和鋰電池供電兩種模式,適應于不同的作業情景,實現不間斷的能源供給和無人機巡檢作業。
1.1 無人機巡檢控制系統
變電站無人機巡檢控制系統在智能運檢管控中心、集控站以及智慧站三級同步部署。通過部署在信息內網的變電站無人機巡檢智能運檢管控中心實時控制系統遠程控制無人機,集控站包含所有變電站的主設備,所有變電站的數據信息通過光纖傳輸到集控站中集中管理,實時控制無人機巡檢動態。智慧站集設備監測、狀態感知、智能管控以及全面機器巡視于一體,提升運維效率。無人機巡檢控制系統架構如圖1所示。
1.2 無人機巡檢裝備
巡檢裝備主要包括移動智能機巢、無人機集群、氣象監測站、無人機起降平臺、機艙、掛載作業單元(可見光、熱紅外、紫外)以及服務器等設備。5G技術應用在移動式智能機巢上,可容納多種、多臺、多掛載無人機開展變電站設備智能巡檢。自動起降小型多旋翼無人機掛載多種作業單元開展帶電檢測,氣象監測站為無人機集群提供起降平臺,采用RTK與視覺識別的融合技術,紅外感知,控制無人機降落在停機坪標志所在處,實現精準降落,降落誤差半徑限制在10 cm以內。此外,設備通信通過服務器實現快速對接,超低時延。
1.3 無人機巡檢通信設備
通信設備包含無人機2.4G/5.8G、5G通信基站、光纖以及用戶終端等。無線通信技術可以實現無人機的遠程遙控測量以及無人機飛行狀態的檢測。無人機上裝載通信設備,將采集的圖像數據信息通過5G通信基站傳至云端服務器,用戶終端可實時監測無人機巡檢現場狀態,以便操控讀取變電站數據變化。
2 變電站無人機巡檢安全控制系統
2.1 平臺架構
無人機巡檢過程中安全問題不容忽視,在巡檢系統中加入安全控制系統能在最大程度上保證無人機作業安全問題。無人機巡檢安全控制系統流程如圖2所示,應用平臺向服務器發布指令,服務器通過Mqtt服務、流服務以及后臺服務等服務系統將信號發送給管控平臺,便于客戶端實時獲取無人機飛行情況。同時主控板收到服務器發出的指令,控制電機操作,電池裝載后艙門打開,平臺上升,釋放無人機。在檢測安全后,無人機起飛,到達變電站高空作業指定高度進行巡檢工作。安全檢測不通過,系統會反饋信息給服務器,檢查故障所在,重新發出指令起飛。反饋系統的加入保證了無人機和設備的安全。
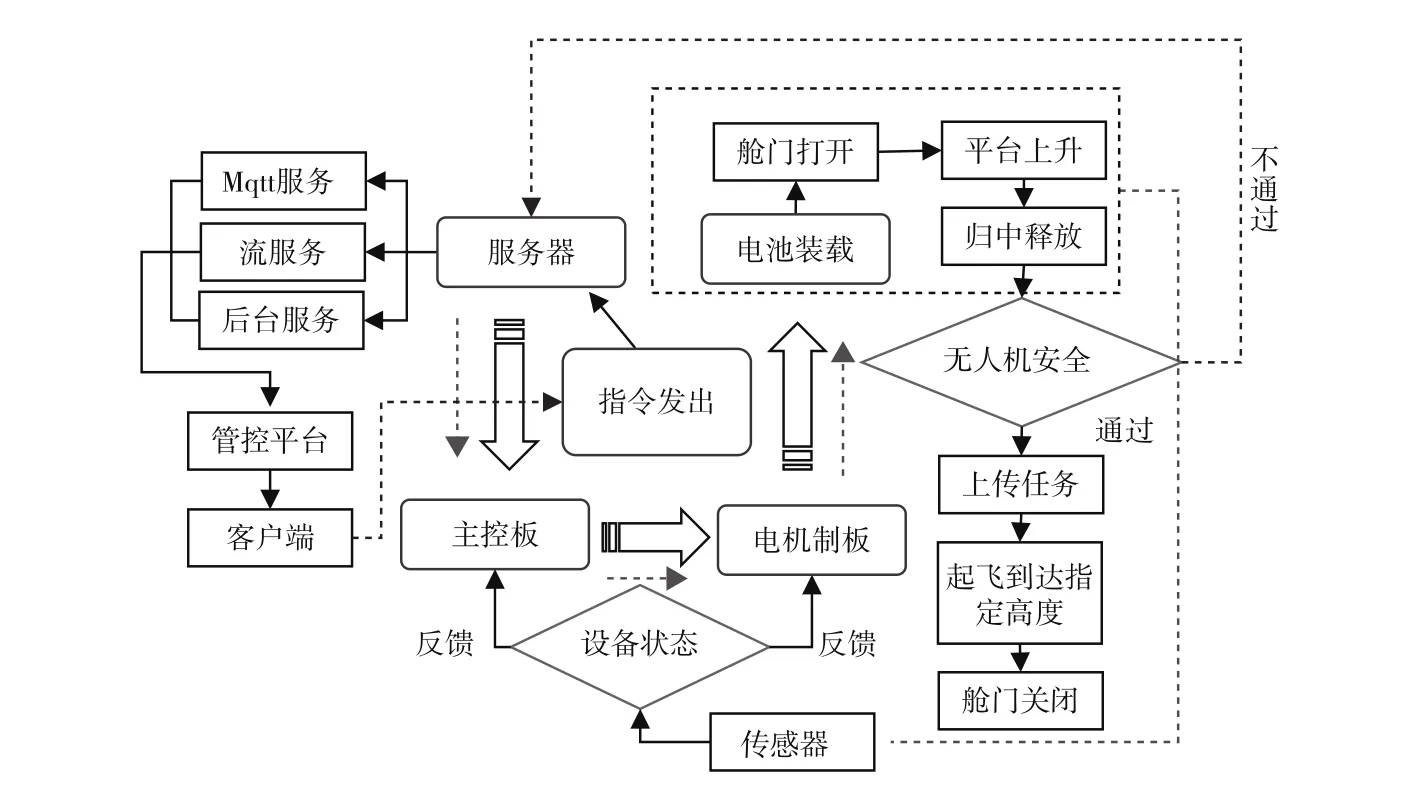
圖2 無人機巡檢安全控制系統流程圖
2.2 功能實現
5G技術應用在移動式智能機巢上,5G網絡切片技術為變電站應用場景提供隔離的網絡環境,結合終端設備、接入網資源、核心網資源以及網絡運營和維護管理系統,為遠程控制指令和圖片視頻數據傳輸等傳輸作業場景提供獨立、隔離和集成的網絡。利用5G通信技術的優勢,無人機智能管控平臺與移動式機巢保持低延遲作為通信優先級,控制無人機巡檢作業異常時及時發出應急懸停、任務中斷原路返航以及低電量就地迫降等安全控制策略[9,10]。
采用多機協同控制技術,系統同時支持對多臺無人機進行監控,隨時根據作業情況進行管控。規范化管理不同作業模式下飛行任務的創建、編輯以及下發。同時支持本地航線、航點飛行、線狀巡視、動態規劃(勾選臺賬動態生成航線)、全景采集、正射影像、傾斜攝影、精細巡視等任務管理,通過移動式智能機巢將數據傳輸至無人機智能控制平臺終端軟件。
3 無人機巡檢安全控制方案
3.1 異常智能應急懸停
無人機在巡檢過程中,因遇到磁場干擾或線路阻隔等情況,造成飛行異常,容易引起安全事故。在無人機加載設備中安裝智能感應裝置,巡檢過程異常時無人機傳感器接收信號,機身懸停,避免無人機墜毀造成經濟損失和安全問題。
3.2 任務中斷原路返航
多數無人機在工作過程中,由于環境的復雜不能及時做出反饋。在變電站這種高磁場環境中,無線通信易受到干擾,巡檢工作中斷。因此在無人機中安裝智能反饋系統,作業中斷時無人機智能返航,有效保證了無人機在巡檢過程中的安全飛行。
3.3 低電量就地迫降
巡檢工作規模大,因此在無人機改造上更為精密,大體積的機身和攜帶設備要求無人機續航能力足夠高,保證一次作業順利進行。超長待機需增加機身重量,造成飛行效率低,在巡檢中當電量不足時,無人機在當前位置智能迫降,等待工作人員更換電池,避免因電量不足空中墜落造成事故,提高了變電站無人機巡航的可靠性。
4 結 論
針對變電站巡檢作業的安全問題,采用5G技術聯網通信,將無人機巡檢技術應用到變電站運維作業中,保證無人機在巡檢過程中安全運行。同時利用5G通信技術的超低時和超大帶寬的特性,加快巡航數據傳送速度。此外,在無人機巡檢系統中加入安全控制系統,執行安全檢測反饋,制定作業異常智能應急懸停、任務中斷原路返航以及低電量就地迫降等安全控制策略,實現了遠程應急處理,保證變電站復雜環境下無人機巡檢安全進行,提高了安全系數和工作效率。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
故事大王(2016年7期)2016-09-22 17:30:08
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
