基于Virtuoso3D 的大面積弱紋理區域空三計算研究
2021-10-27 05:52:04曹建軍
城市道橋與防洪 2021年9期
曹建軍
[上海市政工程設計研究總院(集團)有限公司,上海市 200092]
0 引言
近年來,隨著無人機傾斜影像測量硬件設備和內業數據處理平臺的發展,實景三維模型建模在測繪領域、CIM、GIS 領域得到了廣泛的應用。國內外學者對傾斜攝影多視角影像進行實景三維模型重建做了大量的研究工作。李卉[1]利用無人機搭載非量測數碼相機,采用一整套設計方案,為基于多旋翼無人機進行傾斜攝影測量構建三維模型的方法提供了驗證,表明此方案的可行性。還原了建筑物側面紋理,構建三維模型。曲林等人[2]利用無人機自制鏡頭獲取傾斜攝影數據,應用Inpho、Pix4Dmapper、街景工廠等軟件進行實景三維建模的方法。除總結研究成果外,還對無人機實景三維建模的應用領域進行了探討,為智慧城市的三維系統建設提供新的解決方案。王丙濤等[3]在總結了三維建模技術流程的基礎上,提出傾斜攝影三維建模成果的精度與質量水平檢測方法,在一定程度上為傾斜攝影三維建模技術規范和模型數據標準提供了參考與借鑒。周小杰等[4]利用無人機傾斜攝影技術實現免調繪的大比例尺地形圖測繪方法。
空中三角測量(簡稱空三測量)作為傾斜攝影測量過程的重要環節,其成果質量直接決定著最終產品的數學精度,目前對于空三測量的優化尚缺乏深入研究。作為空三加密中的重要內容,相對定向精度對空三成果質量至關重要。當前數字攝影測量中對地面目標的自動識別與提取主要依賴于對影像結構與紋理的分析[5],在雄安新區植被、防塵網密集,弱紋理區的空中三角測量精度難以控制,嚴重影響了空三測量加密和實景三維模型構建的精度。現根據實際項目經驗,以Virtuoso3D 傾斜攝影三維建模系統為基礎,介紹空三測量加密的操作方法,分析弱紋理區域空三測量中的常見問題并提出相應的解決方案,提高弱紋理區域空三測量精度,提高弱紋理區域實景三維模型構建精度和效率。
1 空三測量
1.1 空三測量原理
在無人機傾斜攝影測量內業數據處理過程中,空三測量是指利用五鏡頭相機連續拍攝的具有一定重疊度的航攝像片,根據像片曝光時的外方位元素和一定數量的野外實際測量像控點,以數據后處理方法解算獲取加密點的平面坐標和高程。
在Virtuoso3D 中,空三測量是自動完成的。軟件廣泛采用機器視覺普適性算法搜索相似影像,配合基于攝影測量的嚴密解算方式,在減少匹配次數的同時充分提升空三成功率和精度,有效解決空三連接點分布不均、斷裂、分層等問題,自由網之后的精轉點遵循由粗到精的原則分層迭代獲得可靠的空三成果,以供后續實景三維模型重建使用。
空中三角測量是實景三維模型構建過程中的一個重要環節,通過空三加密計算出大量的連接點,利用這些連接點構建不規則三角網TIN,生成實景三維模型的基本框架,將三維模型白膜和表面的紋理信息進行自動映射,從而獲取具有真實、自然紋理的高分辨率實景三維模型[6]。
1.2 Virtuos o3D 空三測量操作步驟
Virtuoso3D 空三測量包括以下步驟:
(1)外業數據整理。根據測區范圍選擇影像、POS數據、像控點數據。
(2)影像導入。在新建工程導入影像數據,并添加POS。
(3)提交自由網空三測量任務。影像、POS 數據導入完成并檢查無誤后,進行自由網空三測量任務提交。
(4)刺像控點。自由網解算通過后,將野外實際測量的像控點坐標,按照實際位置刺到像片上。
(5)提交控制網空三測量任務。控制點刺點完成并檢查無誤后,進行控制網空三測量任務提交。
2 弱紋理區域空三測量優化實例分析
2.1 航攝區域概況
航測區域位于容東片區,測區面積約7 km2,地形起伏落差較小,測區房屋密度小、樓層低,拆遷與施工場地較多,植被與防塵網等弱紋理區域面積比重大,見圖1 所示。

圖1 航攝區域植被、防塵網概況之圖示
2.2 數據采集
容東片區使用科威泰六懸翼無人機搭載睿博五鏡頭傾斜相機進行數據采集,共進行了20 架次航高為80 m,航向重疊度為85%,旁向重疊度80%,獲取像片165 000 張,影像分辨率1.5 cm。測區內共布設像控點110 個,坐標系統為CGCS2000,分布見圖2所示。
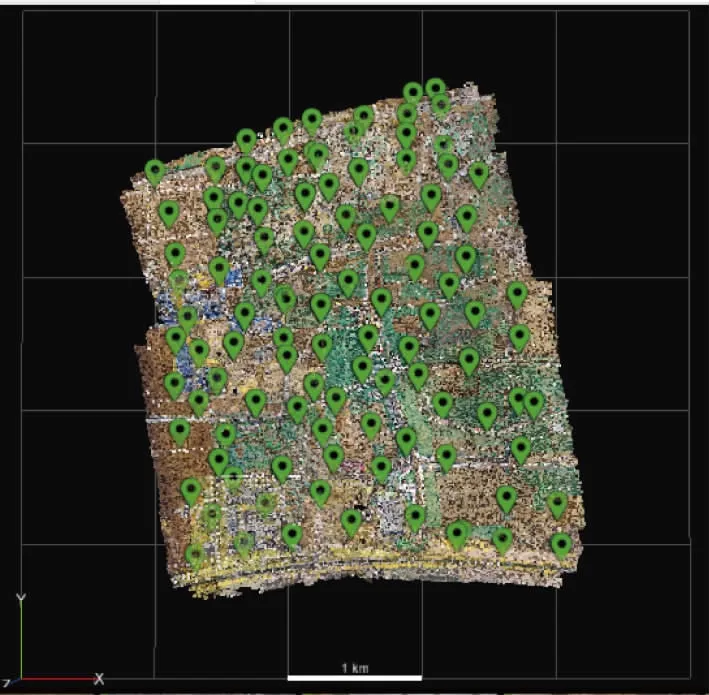
圖2 航攝區域像控點分布之圖示
2.3 優化方法
空三測量是實景三維建模構建的基礎,其精度直接影響后續三維建模成果的質量,因此對大面積弱紋理區域空三測量進行質量控制尤為重要。影響空中三角測量加密精度的因素有多種,現主要針對影像與POS 質量、像控點布設、內業刺點精度、空三測量算法等影響因素,提出關于弱紋理區域空三測量質量控制的方法。
2.3.1 影像與P OS 質量
影像與POS 數據的質量直接影響空三測量加密的精度。影像清晰、色調一致、層次鮮明、色彩反差合理、色調柔和;影像無缺陷、錯位、重影、不清晰和位置偏移等情況;像控點標志所在的影像清晰;影像無陰影、大范圍反光、不清晰點等突出問題。POS 數據正確,記錄完整,與影像數據一一對應。
2.3.2 像控點布設
像控點通常選擇在明顯、易于識別、位置固定且便于量測的地方。根據測區弱紋理區域面積大的實景情況,采用的像控點樣式為白色和紅色兩個頂角相對的直角等腰三角形,大小以100 cm×100 cm的正方形,如圖1 所示。像控點之間的布設間隔為200 m~300 m,布設方案如圖2 所示。
2.3.3 刺點準確度
不同內業工作人員的刺點準確度存在差異,為保證刺點精度,該項目采用一人刺點模式。刺點過程中盡量選取像控點位置相對居中、無變形且無遮擋的影像進行刺點,減少影像畸變帶來的影響。
2.3.4 空三測量算法
大面積植被、防塵網等弱紋理區域在航拍過程中會出現在多張連續影像中,存在特征點不明顯或者缺失現象。因此,Smart 3D、Context Capture 等基于多視影像進行大量特征點計算提取,對獲取的特征點采用多基線多特征匹配技術自動匹配同名點,然后采用光束法區域網平差方法進行整體平差計算的軟件在空三計算過程中容易出現連續弱紋理像片不參與運算的問題。
該項目采用Virtuoso3D 進行空三計算,軟件采用機器視覺普適性算法,配合基于攝影測量的嚴密解算方式,在減少匹配次數的同時充分提升空三成功率和精度,有效解決空三連接點分布不均、斷裂、分層等問題,自由網之后的精轉點遵循由粗到精的原則分層迭代獲得可靠的空三成果。
3 空三計算精度分析
對容東片區外業采集數據先后采用Context Capture 與Virtuoso3D 進行空三計算處理。
在Context Capture 中,由于算法和設備性能局限,空三計算的區塊按像控點分布情況和像片數量劃分。各區塊之間采用公共像控點進行連接,單個區塊像片在15 000 張左右,共劃分為9 個空三計算區塊。經過多次空三計算,人工加入連接點,但仍有6個區塊的空三計算結果出現多幅影像不參與運算、分層、像控點平差精度超限等問題,無法完整構建航攝區域實景三維模型(見圖3、圖4 所示)。
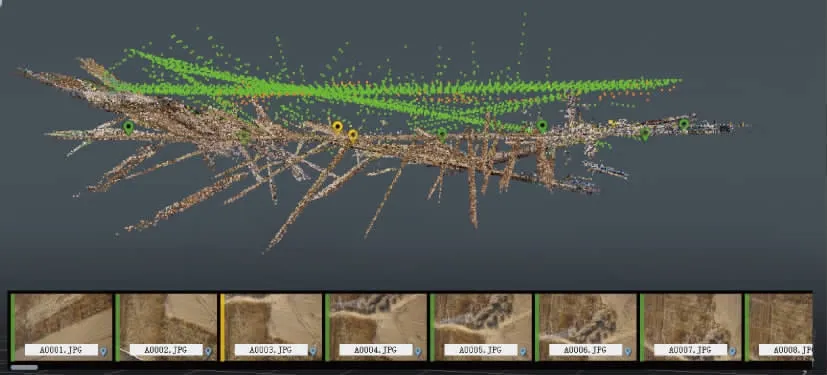
圖3 弱紋理影像空三計算分層之圖示
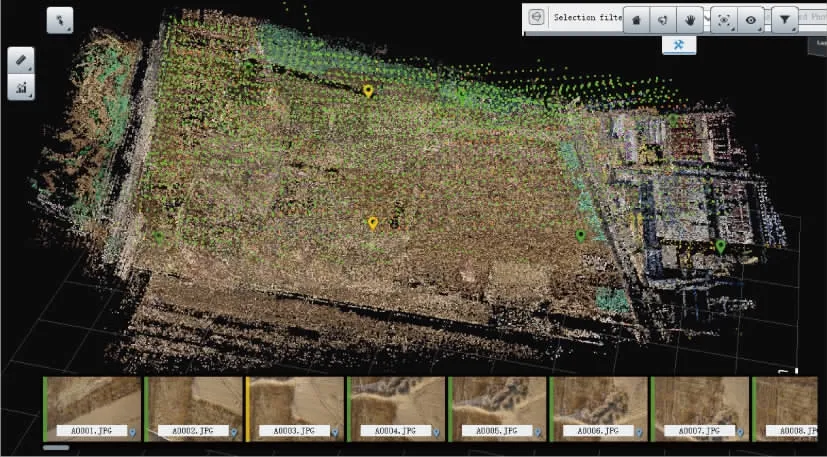
圖4 弱紋理區塊空三計算結果不達標之圖示
在Virtuoso3D 中,為了最后建模合區時不會出現空洞,分區的時候需要考慮區域間影像有所重疊,因此按飛行架次分區。航攝區域共劃分為6 個空三計算區塊,全部區塊自由網空三計算一次通過,控制網空三計算一次通過。將控制網空三結果導入到Context Capture 中進行合并。空三區塊計算結果合并情況如圖1 所示,文章截取了部分像控點的精度分析報告,見圖5 所示。
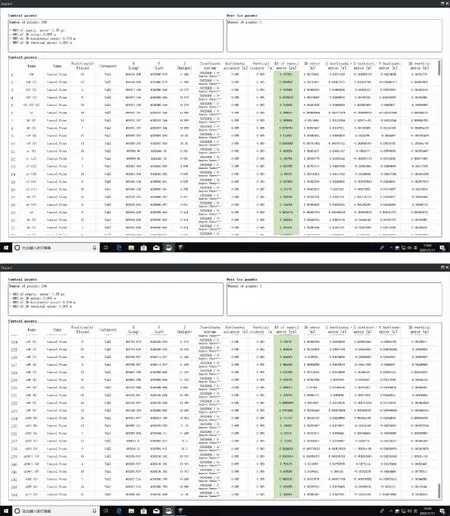
圖5 部分像控點精度分析報告之圖示
經過Virtuoso3D 處理過后,出現少量弱紋理影像未參與計算的情況,空三計算結果未出現分層,像控點投影誤差均在一個像素內,精度符合要求。實踐結果表明,Virtuoso3D 的影像匹配效果更好,航帶間相鄰影像都匹配上同名點,在未進行人工選取同名點的情況下,Virtuoso3D 同樣能更好地匹配同名點,能大大提高計算機自動連接點效率,提高空三計算的通過率,節約空三計算時間。
4 結語
空中三角測量是無人機傾斜攝影測量內業數據處理過程中的一道重要工序,是決定最終建模成果精度的關鍵因素。在空三計算常規操作過程中,嚴把質量關,避免誤差積累,并針對大面積弱紋理區域空三計算難的問題采取有效的解決措施,才能保證空三測量的精度和質量。本文以容東片區的無人機傾斜影像測量數據為例,針對大面積植被、防塵網等弱紋理區域,特征地物點少,常規影像匹配效果不理想,存在諸多錯點,嚴重影響空三加密的精度。利用Virtuoso3D 軟件進行空三測量計算,從像控點精度結果可以看出,此套方法能有效提高空三測量精度和效率。在廉價航空攝影條件下,在各類客觀條件不利的情況下,摸索出適合此類大面積弱紋理地區空三加密的方法。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52