基于BPSO-M1DCNN的行星齒輪箱故障診斷方法研究*
2021-10-27 08:39:50郭永倫吳國新劉秀麗徐小力
機電工程 2021年10期
郭永倫,吳國新,劉秀麗,徐小力
(北京信息科技大學(xué) 現(xiàn)代測控技術(shù)教育部重點實驗室,北京 100192)
0 引 言
目前,軸承、行星齒輪被廣泛應(yīng)用于風(fēng)電機組、航空設(shè)備等各種機電設(shè)備中,但由于其所處的環(huán)境惡劣,容易出現(xiàn)磨損、裂紋、斷齒等故障。傳統(tǒng)的故障診斷方法經(jīng)常難以滿足現(xiàn)代機電設(shè)備中軸承和行星齒輪故障識別的要求。因此,對其進(jìn)行故障診斷方法的深入研究,對于提高機電設(shè)備運行可靠性具有重要的作用。
傳統(tǒng)故障診斷方法一般包括兩個步驟,首先對信號進(jìn)行預(yù)處理和特征提取操作,其次將人工提取的特征輸入到采用傳統(tǒng)淺層機器學(xué)習(xí)算法的分類器中,以完成對故障種類的識別,諸如支持向量機(support vector machines,SVM)[1-3]、BP神經(jīng)網(wǎng)絡(luò)[4,5]等。上述的研究方法雖然診斷精度較高,但特征提取需要人工操作,因而其泛化性比較差;且上述方法又將故障特征提取和識別割裂為了兩部分。
與傳統(tǒng)算法相區(qū)別,深度學(xué)習(xí)依靠復(fù)合結(jié)構(gòu)以及不同權(quán)重比例連接,能夠識別并提取故障的本質(zhì)特征,學(xué)習(xí)能力更是強大。作為常見的深度學(xué)習(xí)算法,卷積神經(jīng)網(wǎng)絡(luò)(CNN)[6,7]依靠其權(quán)值共享、稀疏鏈接等特點使其特征學(xué)習(xí)能力強,泛化能力高,因而越來越多的專家學(xué)者將其應(yīng)用到了故障檢測和識別領(lǐng)域。文獻(xiàn)[8-10]將滾動軸承的振動信號轉(zhuǎn)換為二維特征圖譜,輸入到CNN中進(jìn)行故障分類識別,實現(xiàn)了良好的故障分類效果。
以上研究證明了CNN在解決故障診斷問題方面是有實際效果的,但當(dāng)面臨不同的問題時,仍需要重新進(jìn)行反復(fù)實驗來設(shè)計CNN網(wǎng)絡(luò),和設(shè)置相關(guān)的參數(shù);并且由于振動信號不同,故障特征所處位置和所占比重不一樣,再加上外加噪聲等外界因素的影響,因此,單一尺度的卷積層很難被提取,并識別其有效特征。
與人工手動調(diào)試模型相比,基于BPSO-M1DCNN網(wǎng)絡(luò)能自主選取最優(yōu)參數(shù),有著更好的魯棒性和更高的故障識別準(zhǔn)確率。文獻(xiàn)[11]基于PSO算法對1DCNN的卷積核個數(shù)和學(xué)習(xí)率進(jìn)行了優(yōu)化,輸入發(fā)射車滾動軸承故障數(shù)據(jù)進(jìn)行了驗證。文獻(xiàn)[12]利用PSO算法對深度置信網(wǎng)絡(luò)(deep belief network,DBN)每層神經(jīng)元數(shù)目,學(xué)習(xí)率進(jìn)行了優(yōu)化,實驗表明該方法能夠減少模型調(diào)參時間,故障識別準(zhǔn)確率得到了有效提升。
但是上述方法僅優(yōu)化單一尺度的神經(jīng)網(wǎng)絡(luò)模型的少量參數(shù),如學(xué)習(xí)率、神經(jīng)元個數(shù)和大小,不能涵蓋大部分參數(shù)和多尺度的神經(jīng)網(wǎng)絡(luò),這會導(dǎo)致PSO算法的泛化程度不高,同時也會在一定程度限制PSO算法和深度學(xué)習(xí)模型的結(jié)合。
本文針對CNN不能對故障特征實現(xiàn)多尺度提取和需要手動調(diào)試結(jié)構(gòu)參數(shù)的缺陷,提出基于BPSO-M1DCNN網(wǎng)絡(luò)的優(yōu)化方法,并將其應(yīng)用到自行采集的行星齒輪箱振動數(shù)據(jù)集,以提高基于BPSO-M1DCNN方法的自適應(yīng)性、故障特征多尺度識別能力以及分類正確率,進(jìn)一步減少人工調(diào)試的時間和對人工經(jīng)驗的依賴。
1 BPSO-M1DCNN基礎(chǔ)理論
1.1 卷積神經(jīng)網(wǎng)絡(luò)
CNN模仿生物的視知覺機制構(gòu)建,其一般結(jié)構(gòu)包括輸入層、卷積層、池化層、全連接層、輸出層。
卷積神經(jīng)網(wǎng)絡(luò)架構(gòu)如圖1所示。
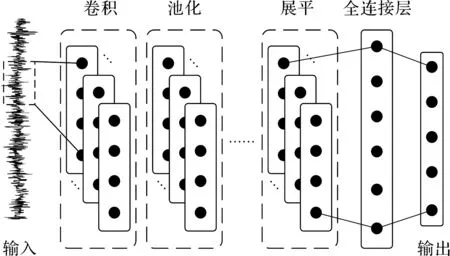
圖1 卷積神經(jīng)網(wǎng)絡(luò)架構(gòu)
卷積層主要用于提取特征信息,其憑借稀疏鏈接和權(quán)值共享的優(yōu)勢,通過卷積核與輸入數(shù)據(jù)進(jìn)行卷積操作,其數(shù)學(xué)模型為:
(1)

池化層主要用于提取局部特征,使得收斂速度加快,數(shù)學(xué)公式見下式:
(2)

1.2 離散二進(jìn)制粒子群優(yōu)化算法
PSO的產(chǎn)生源自對鳥群覓食行為的觀察和分析,現(xiàn)已經(jīng)被應(yīng)用到神經(jīng)網(wǎng)絡(luò)訓(xùn)練、路徑優(yōu)化等諸多領(lǐng)域。但是該算法只能在連續(xù)解空間中搜索,對于離散的搜索空間,如優(yōu)化神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)以及超參數(shù),則不能很好地適用。
因此,筆者提出將標(biāo)準(zhǔn)PSO算法的改進(jìn)版本BPSO[13]應(yīng)用于M1DCNN的優(yōu)化過程。
具體優(yōu)化過程如下:
(1)初始化粒子群的規(guī)模大小i,位置向量xi,速度向量vi,待優(yōu)化參數(shù)的取值范圍。其中,除了粒子群個數(shù),其他參數(shù)均需要二進(jìn)制編碼;
(2)解碼每個粒子的位置向量xi,計算其對應(yīng)的適應(yīng)度值,即測試集平均分類正確率;
(3)對比每個粒子的適應(yīng)度值,自身最優(yōu)適應(yīng)度值和全局最佳適應(yīng)度值;如果較好,則通過更新獲得個體最佳位置pbesti,全局最佳位置gbesti;
(4)每一次迭代回合結(jié)束后,根據(jù)公式(3~5)調(diào)整粒子群的速度向量和位置向量;
(5)未達(dá)到結(jié)束條件,則繼續(xù)步驟2,直到達(dá)到終止迭代條件,即最大迭代次數(shù)或最小適應(yīng)度值。
其中的vi,s(vi),xi分別為:
vi=ωvi+c1*r1*(pbesti-xi)+c2*r2*(gbesti-xi)
(3)
(4)
(5)
式中:i—粒子群中粒子的個數(shù);vi—第i個粒子的速度向量;xi—各個粒子二進(jìn)制編碼的位置向量,其中速度向量和位置向量里各個元素與該網(wǎng)絡(luò)待優(yōu)化的參數(shù)對應(yīng);w—慣性因子;c1,c2—學(xué)習(xí)因子;r1,r2—[0,1]范圍內(nèi)均勻分布的隨機數(shù);s(vi)—將速度向量中速度的分量映射到[0,1]區(qū)間的sigmoid函數(shù);rand()—[0,1]范圍內(nèi)的隨機數(shù),當(dāng)取值小于s(vi)時,粒子位置向量中相應(yīng)的位置分量變成1,否則變成0。
2 BPSO-M1DCNN故障診斷方法
2.1 數(shù)據(jù)集建立
輸入的信號為一維振動數(shù)據(jù),因故障樣本有限,需要增加數(shù)據(jù)集。擴(kuò)充數(shù)據(jù)集的方法是滑窗采樣法,滑窗采樣法的截取方式如圖2所示。
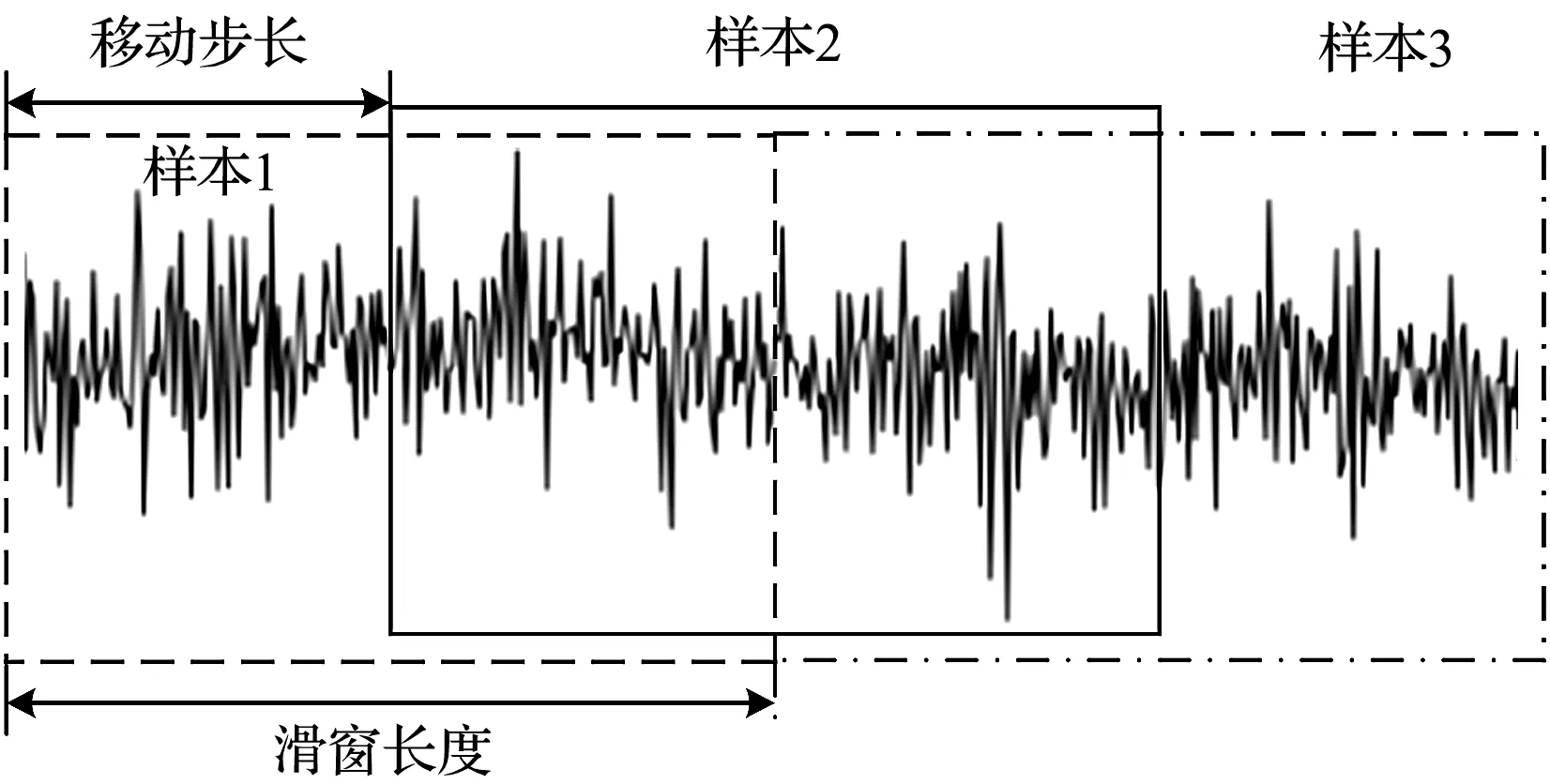
圖2 滑窗采樣法
之后是將其分為訓(xùn)練集和測試集。采用該方法的目的既可以保留元素之間的相關(guān)性,不遺失特征,又可以增加樣本數(shù)量,使模型提取有效的特征。
2.2 M1DCNN網(wǎng)絡(luò)構(gòu)建及初始化
文獻(xiàn)[14]提出采用PSO優(yōu)化算法優(yōu)化單一通道的CNN,雖然實驗表明該優(yōu)化方法取得了較好的優(yōu)化效果,但是不同故障特征在振動信號中所占比重不一樣,外加噪聲等外界因素影響,單一尺度的卷積層很難被提取,并識別其有效特征。
受文獻(xiàn)[15]的啟發(fā),筆者構(gòu)建M1DCNN網(wǎng)絡(luò),該結(jié)構(gòu)包含2個通道,每個通道含有4個網(wǎng)絡(luò)層;1個通道是卷積層C1_1,平均池化層A1_2,卷積層C1_3,平均池化層A1_4;另1個是卷積層C2_1,最大池化層M2_2,卷積層C2_3,最大池化層M2_4,二者合并接兩層全連接層F5,F6實現(xiàn)故障識別。
M1DCNN網(wǎng)絡(luò)如圖3所示。

圖3 M1DCNN網(wǎng)絡(luò)
由圖3可知:第1通道的平均池化層作用是去除多余信息,減少參數(shù)個數(shù);第2通道的最大池化層作用是減少輸入信號尺寸,讓特征更加明顯,最后進(jìn)行合并,使得網(wǎng)絡(luò)特征學(xué)習(xí)的能力更加高效。
2.3 BPSO參數(shù)設(shè)置
筆者選取粒子群數(shù)目N為6,迭代回合M為8;每個粒子為一個二進(jìn)制編碼的多維向量,包括2個通道各層卷積核的個數(shù)、尺寸、池化層的尺寸,及全連接層神經(jīng)元的數(shù)量、學(xué)習(xí)率、迭代次數(shù)、批次大小。
BPSO參數(shù)設(shè)置如表1所示。
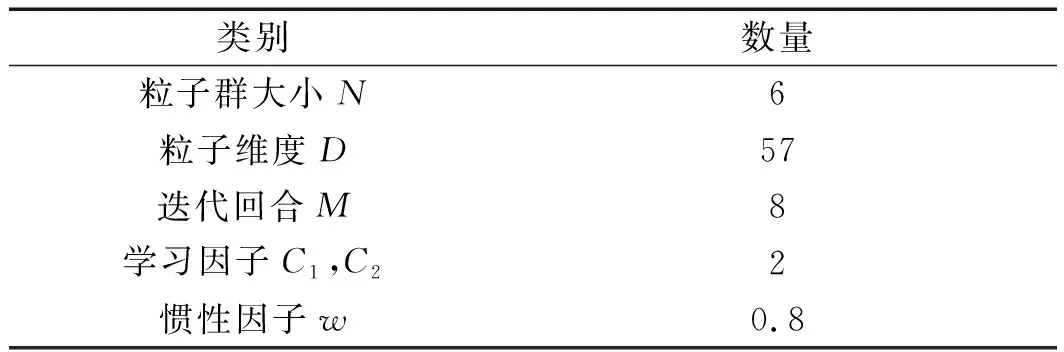
表1 BPSO參數(shù)設(shè)置
2.4 BPSO-M1DCNN故障診斷步驟
BPSO-M1DCNN網(wǎng)絡(luò)的故障分類流程圖如圖4所示。
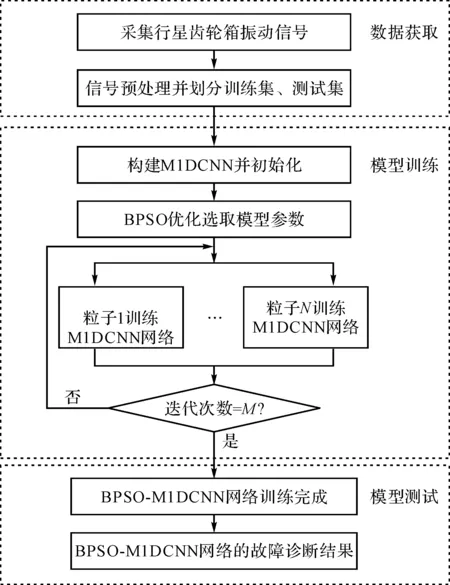
圖4 BPSO-M1DCNN網(wǎng)絡(luò)的故障分類流程圖
其主要步驟如下:
(1)采集不同故障類型的振動信號數(shù)據(jù),預(yù)處理數(shù)據(jù)并劃分訓(xùn)練集和測試集;
(2)構(gòu)建M1DCNN網(wǎng)絡(luò)并初始化;
(3)采用BPSO算法優(yōu)化選取的13個參數(shù),構(gòu)建最優(yōu)的M1DCNN網(wǎng)絡(luò);
(4)采用測試集檢驗BPSO-M1DCNN網(wǎng)絡(luò)的性能,輸出測試結(jié)果。
3 行星齒輪箱故障診斷試驗
3.1 故障數(shù)據(jù)采集
基于行星齒輪箱開展故障診斷研究的相關(guān)試驗平臺包括:電機、扭矩儀、行星齒輪箱、磁粉制動器;其中,扭矩儀對行星齒輪箱的輸入軸與輸出軸施加徑向載荷,磁粉制動器施加軸向載荷。
行星齒輪箱試驗臺如圖5所示。
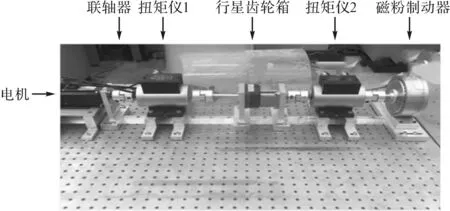
圖5 行星齒輪箱試驗臺
行星齒輪箱的基本參數(shù)如表2所示。
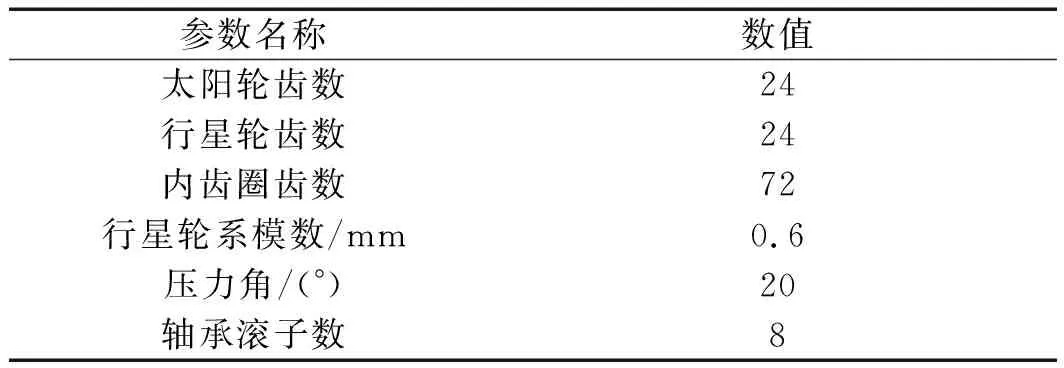
表2 行星齒輪箱的基本參數(shù)
筆者通過在行星齒輪箱放置一個三向加速度傳感器來采集設(shè)備的信號數(shù)據(jù),依次替換事先加工好的缺陷零件模仿行星齒輪箱故障的不同種類(分別為滾動體缺失、齒面磨損的單一故障,以及行星輪斷齒與齒面磨損,行星輪斷齒與滾動體缺失的復(fù)合故障);采樣頻率為20.48 kHz,電機轉(zhuǎn)速為1 980 r/min,每組采集327 675個振動數(shù)據(jù)點。
振動信號時域圖如圖6所示。
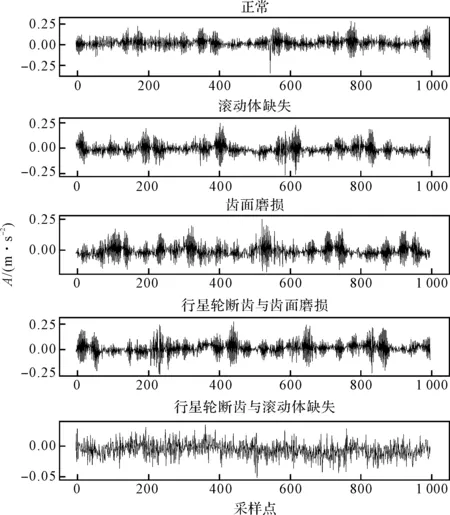
圖6 振動信號時域圖
此處采用重疊采樣法增強原始振動數(shù)據(jù)集。為了不丟失數(shù)據(jù)特征,且能有效增加樣本數(shù)量,筆者設(shè)置滑動分割窗尺寸為512個數(shù)據(jù)點,移動步長為256個數(shù)據(jù)點,共得到6 390個樣本;其中,訓(xùn)練集為4 473個樣本,測試集為1 917個樣本。
行星齒輪箱振動數(shù)據(jù)參數(shù)如表3所示。
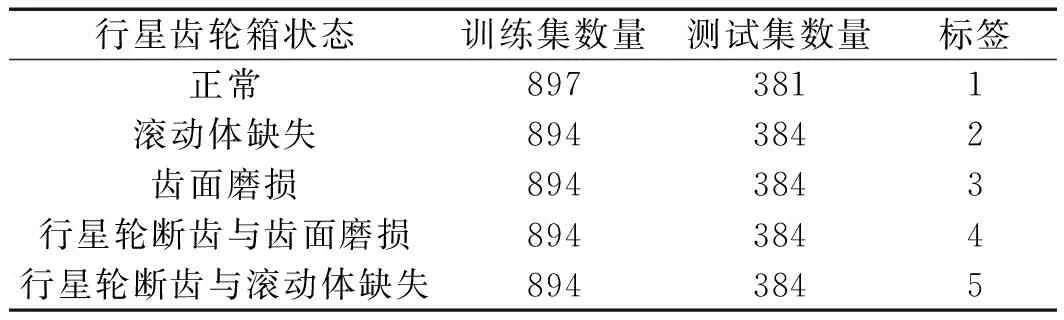
表3 行星齒輪箱振動數(shù)據(jù)參數(shù)
3.2 對比分析
此處計算機的配置參數(shù)為64位Intel i7-9750H、2.60 GHz的主頻、16 GB的內(nèi)存。
I
M1DCNN網(wǎng)絡(luò)優(yōu)化參數(shù)如表4所示。
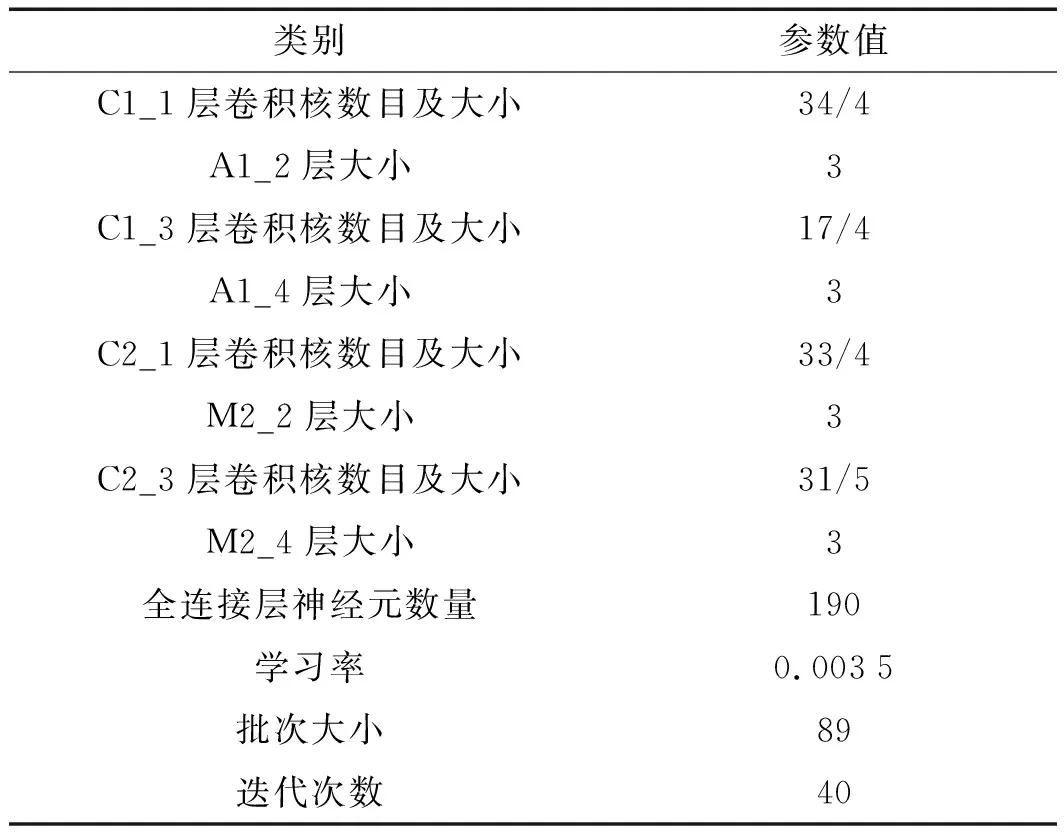
表4 M1DCNN網(wǎng)絡(luò)優(yōu)化參數(shù)
BPSO的迭代過程如圖7所示。
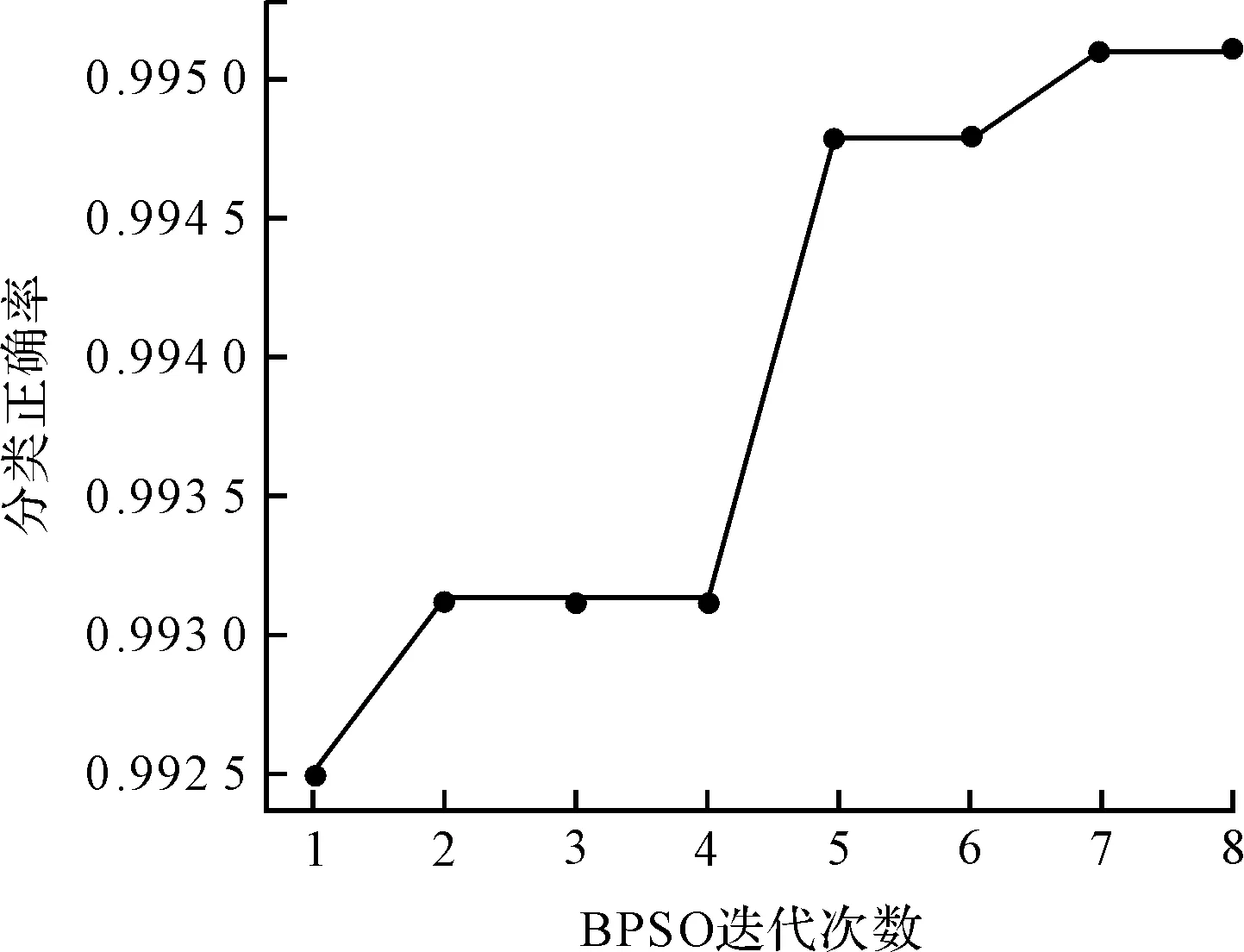
圖7 BPSO的迭代過程
為了進(jìn)行對比說明,筆者分別將BPSO-BP神經(jīng)網(wǎng)絡(luò)、文獻(xiàn)[16]中1DCNN網(wǎng)絡(luò)、文獻(xiàn)[17]中M1DCNN網(wǎng)絡(luò),分別應(yīng)用于相同的振動數(shù)據(jù)進(jìn)行分析診斷,相關(guān)參數(shù)如下:
(1)BPSO-BP神經(jīng)網(wǎng)絡(luò):含有4個神經(jīng)網(wǎng)絡(luò)層,每層神經(jīng)元個數(shù)分別為411、222、48、6,學(xué)習(xí)率為0.01,迭代次數(shù)為90;
(2)1DCNN網(wǎng)絡(luò):C1層有32個卷積核,最大池化層M2尺寸為5,C3層均含有64個卷積核,M4層尺寸為2,之后接分別含有128和64的全連接層F5,F6,學(xué)習(xí)率為0.009,迭代次數(shù)為75次;
(3)M1DCNN網(wǎng)絡(luò):第1個通路C1_1層含20個卷積核,M1_2尺寸為2,C1_3層,C1_5層含5個卷積核,M1_4尺寸為2,平均池化層A1_6尺寸為2;第2條通路的C2_1層有20個卷積核,M2_2層尺寸為2,C2_3,C2_5層含有3個卷積核,M2_4尺寸為2,A2_6尺寸為2;第3條通路的C3_1層同樣含有20個卷積核,M3_2尺寸為2,C3_3和C3_5層含有1個卷積核,M3_4尺寸為2,A3_6層尺度為2,學(xué)習(xí)率為0.003,迭代次數(shù)為80。
筆者采集了上述4種算法最后5次迭代的訓(xùn)練數(shù)據(jù)和測試數(shù)據(jù)正確率的平均值。
行星齒輪箱數(shù)據(jù)集的診斷結(jié)果對比結(jié)果如表5所示。
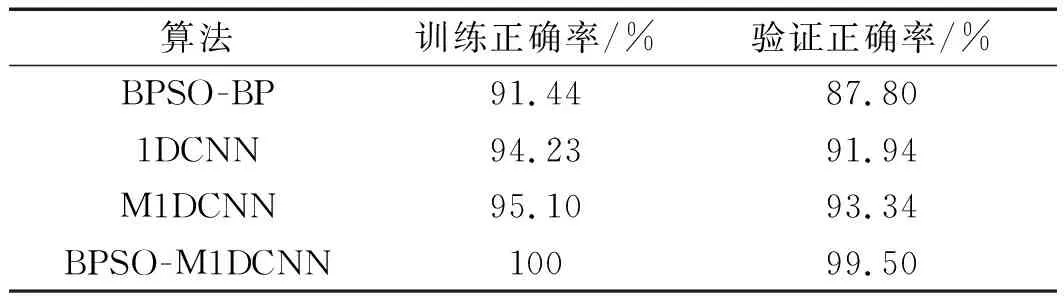
表5 行星齒輪箱數(shù)據(jù)集診斷結(jié)果對比
由表5中可見:BPSO-M1DCNN網(wǎng)絡(luò)的訓(xùn)練正確率和測試正確率遠(yuǎn)高于其他算法,并且沒有過擬合或欠擬合現(xiàn)象,說明該網(wǎng)絡(luò)能自適應(yīng)調(diào)整網(wǎng)絡(luò)參數(shù),且構(gòu)建最優(yōu)結(jié)構(gòu)、泛化性好、魯棒性高;
BPSO-BP神經(jīng)網(wǎng)絡(luò)與另外兩種未經(jīng)優(yōu)化的CNN相比,故障診斷準(zhǔn)確率明顯不如后者,說明深度學(xué)習(xí)算法借助其自身的深層次網(wǎng)絡(luò)結(jié)構(gòu),能有效識別并提取故障的深層次特征,避免了對人工提取特征的依賴和其他因素的干擾,從而可以實現(xiàn)較高精度的故障識別。
M1DCNN、BPSO-M1DCNN的正確率和損失率的關(guān)系曲線如圖8所示。
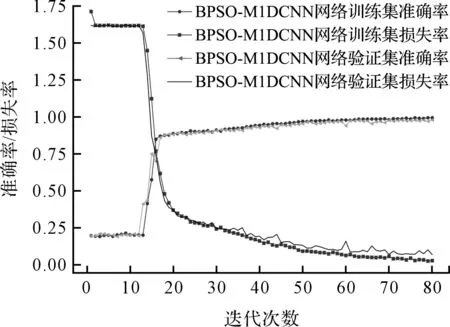
(a)M1DCNN的正確率和損失率
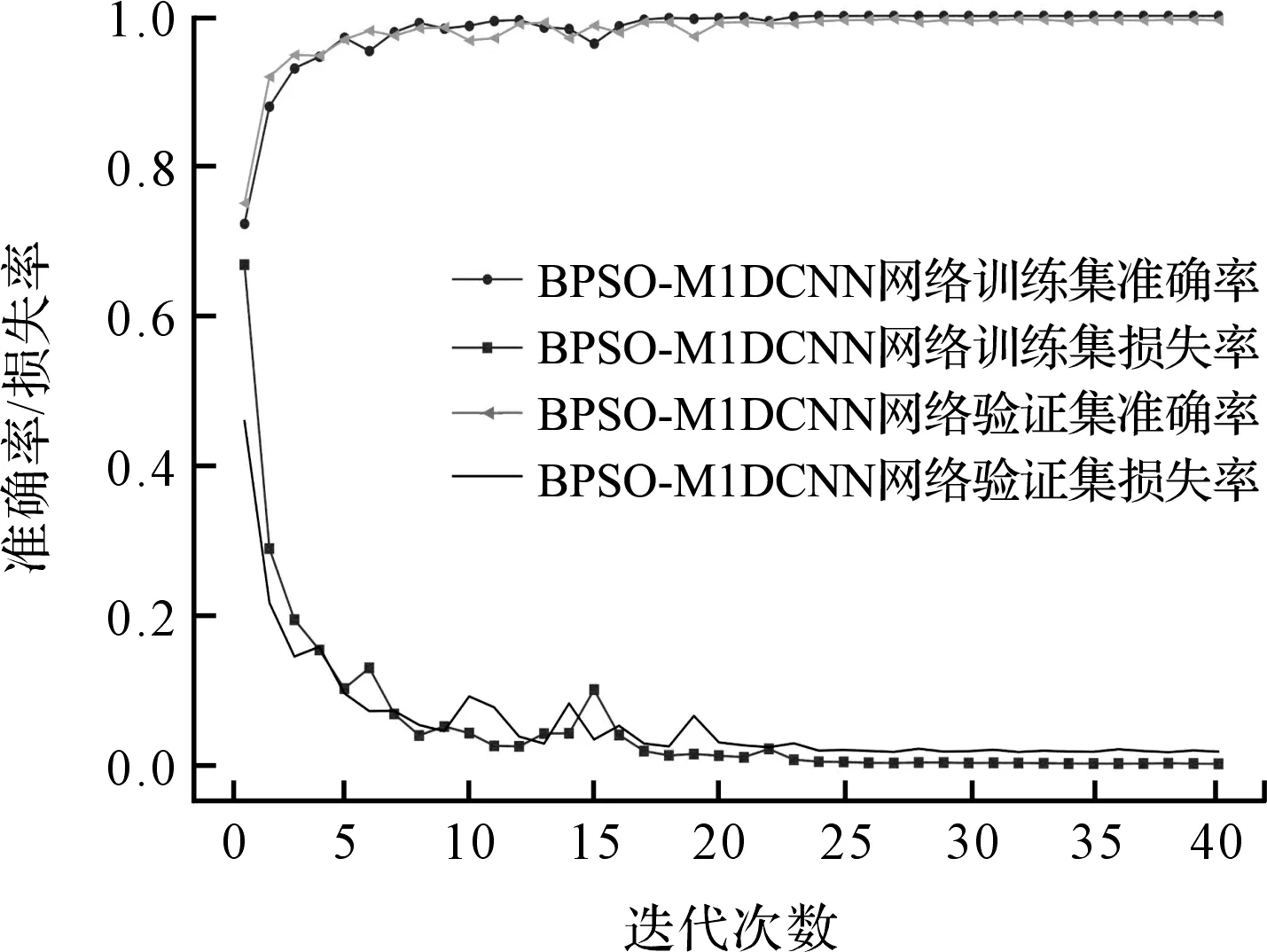
(b)BPSO-M1DCNN的正確率和損失率
由圖8可得:BPSO-M1DCNN網(wǎng)絡(luò)相較于單一M1DCNN網(wǎng)絡(luò)迭代次數(shù)更少,故障診斷準(zhǔn)確率更高,魯棒性更好。
混淆矩陣能夠可視化各類故障的診斷效果,其縱坐標(biāo)表示故障的實際類別,橫坐標(biāo)表示預(yù)測故障的類別,每行表示預(yù)測正確該類故障以及錯誤預(yù)測的百分比。
測試集混淆矩陣如圖9所示。
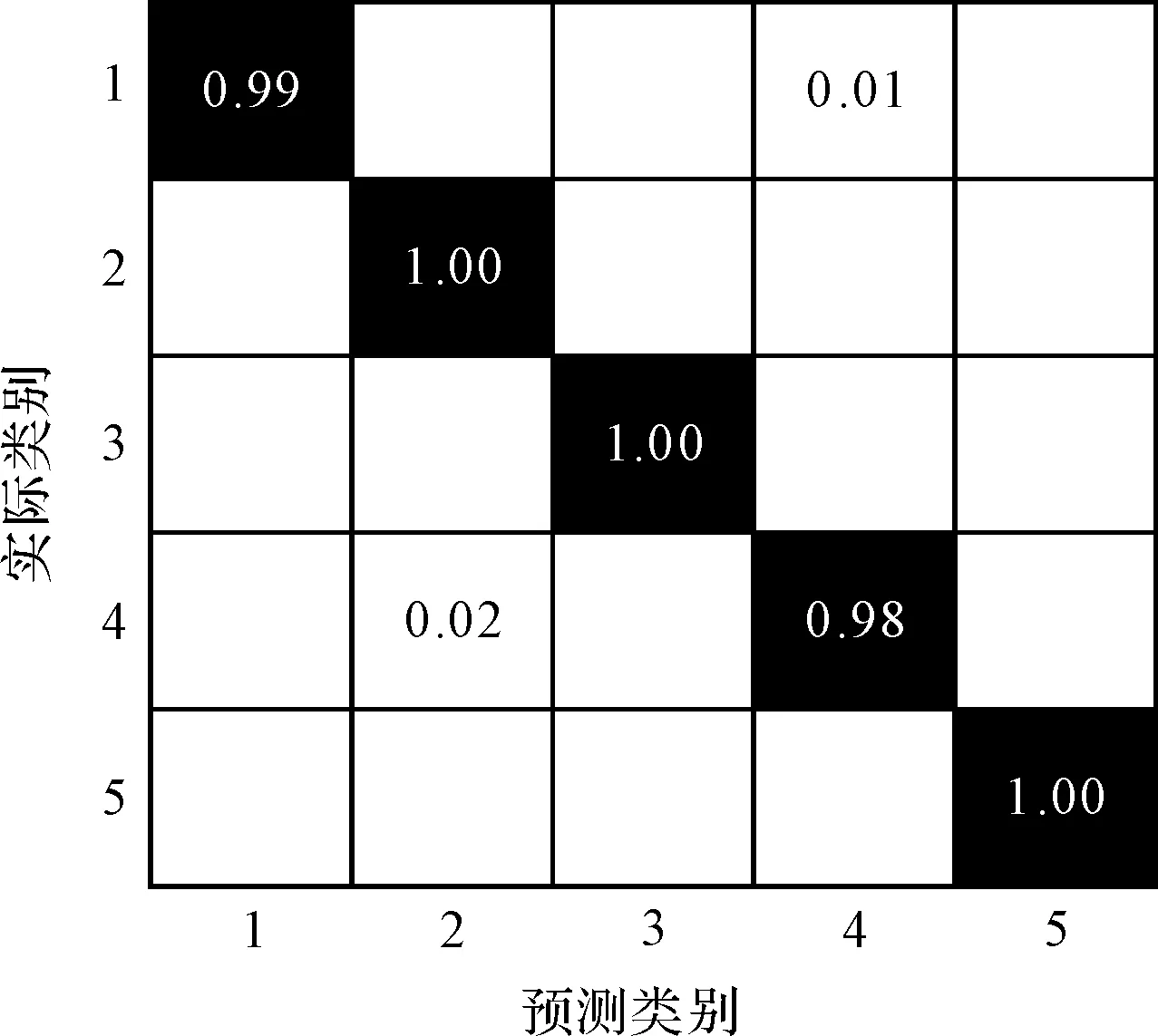
圖9 測試集混淆矩陣
由圖9可以得出:BPSO-M1DCNN網(wǎng)絡(luò)的各類故障識別準(zhǔn)確率達(dá)到了98%以上,說明其能準(zhǔn)確識別各個故障類型。
綜上所述,深度學(xué)習(xí)算法的故障分類效果比傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)更好;BPSO-M1DCNN網(wǎng)絡(luò)在準(zhǔn)確率、擬合效果、魯棒性上優(yōu)于其他深度學(xué)習(xí)算法。
3.3 特征學(xué)習(xí)可視化
本文基于T-SNE方法進(jìn)行特征可視化。T-SNE方法是近幾年來比較流行的數(shù)據(jù)降維與可視化算法,其憑借可視化效果好、低維數(shù)據(jù)的分布與原始數(shù)據(jù)特征空間分布重合度高的特點,目前被廣泛應(yīng)用于各個場景。
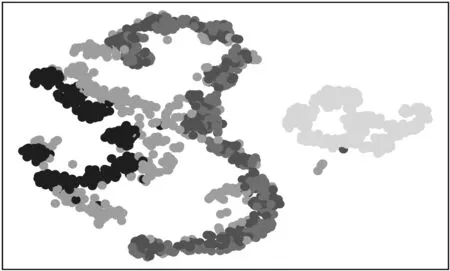
實現(xiàn)行星齒輪箱故障特征學(xué)習(xí)的可視化流程如圖10所示。
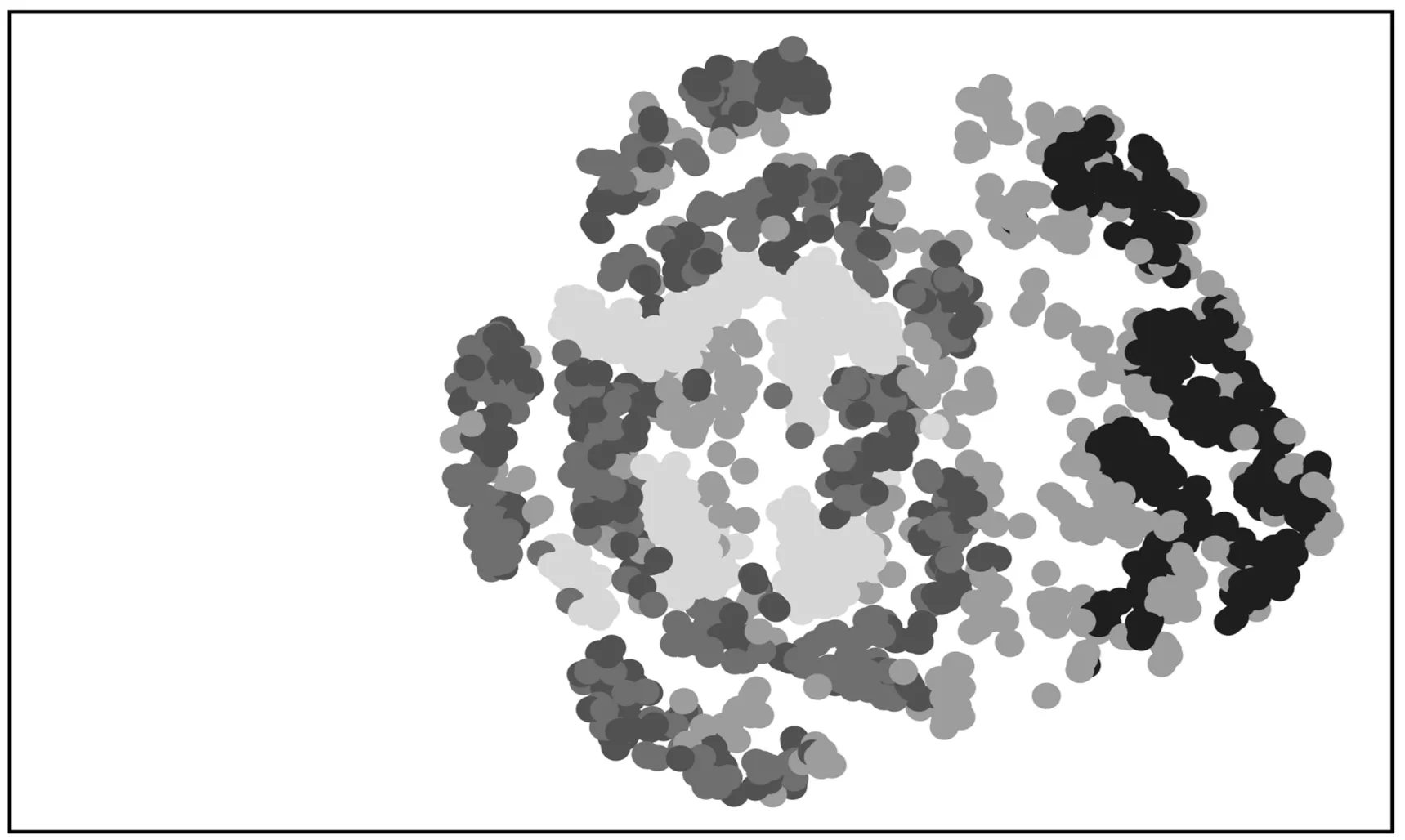
(a)原始數(shù)據(jù)圖像
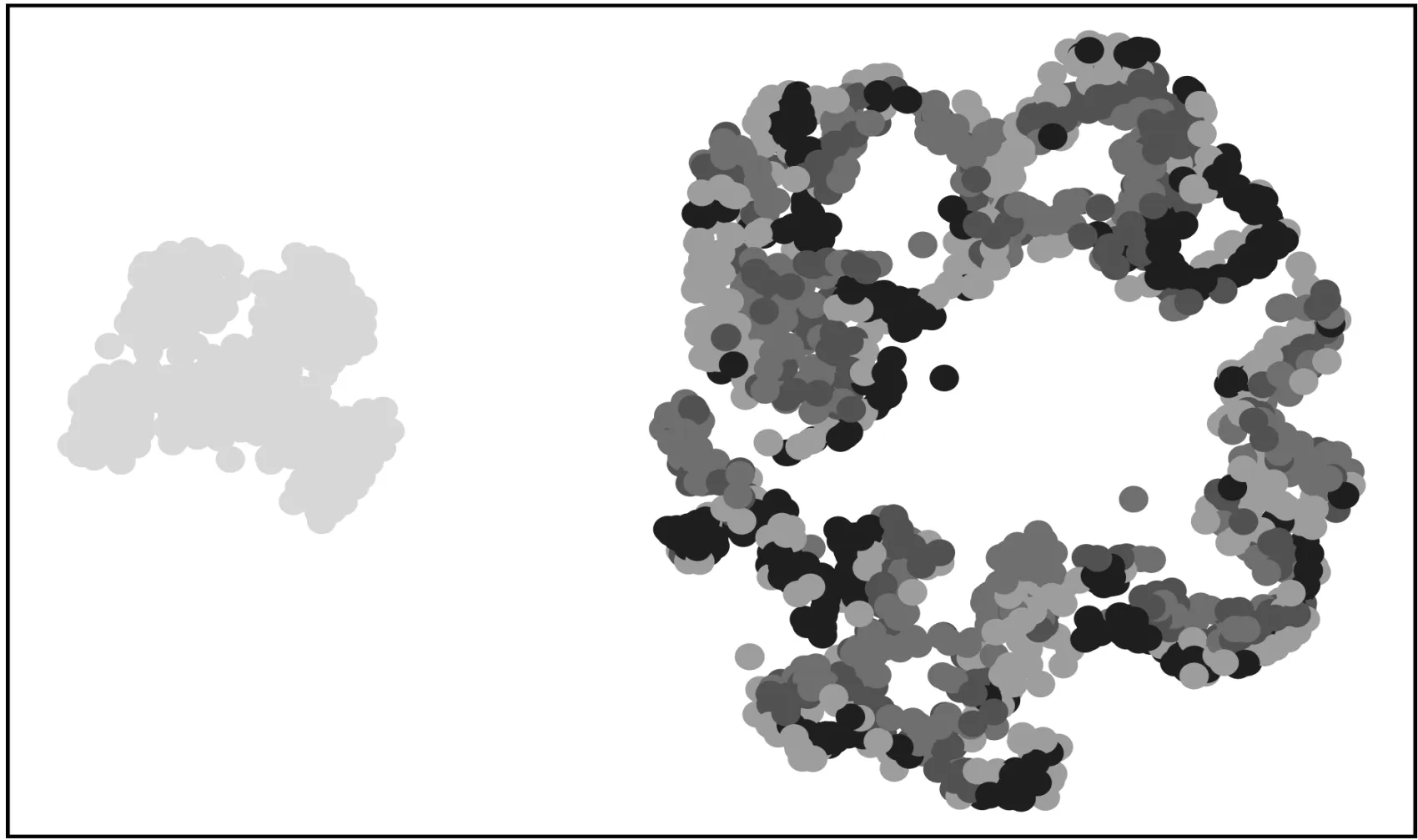
II(b)池化層A1_4(I)和M1_4(II)
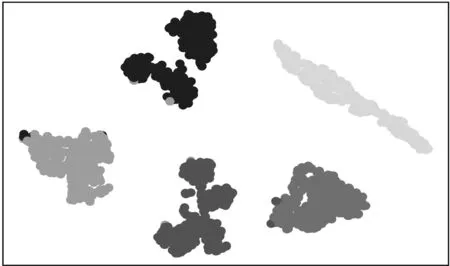
(c)全連接層F5
由圖10(a)可以看出:原始數(shù)據(jù)各個故障類型混合在一塊,無法區(qū)分;
由圖10(b)可以看出:將原始振動數(shù)據(jù)輸入到BPSO-M1DCNN網(wǎng)絡(luò),經(jīng)過雙通道的卷積池化層的特征識別和學(xué)習(xí),輸出的一部分故障已經(jīng)分離出來,具有顯著的邊界;其余混合重疊的故障正漸漸分開,形成各自的邊界,二者合并后連接一個全連接層F5;
由圖10(c)可以看出:全連接層F5輸出的各個故障類型數(shù)據(jù)的特征邊界非常明顯,無不同的故障數(shù)據(jù)重疊或者混合現(xiàn)象;
可視化結(jié)果表明:基于BPSO-M1DCNN網(wǎng)絡(luò)通過自適應(yīng)調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)和超參數(shù),自動學(xué)習(xí)輸入數(shù)據(jù)的原始特征,逐層挖掘其內(nèi)在本質(zhì)特征,大大提升了模型的適用性和魯棒性。
4 結(jié)束語
本文針對CNN網(wǎng)絡(luò)中單一尺度卷積核提取多尺度特征不全面,且需要手動調(diào)試結(jié)構(gòu)和參數(shù)的問題,提出了基于BPSO-M1DCNN網(wǎng)絡(luò)的優(yōu)化方法,并將該方法應(yīng)用到行星齒輪箱振動數(shù)據(jù)集,通過對比實驗,混淆矩陣顯示各類故障分類效果,以及T-SNE可視化算法驗證了該方法的有效性。
研究結(jié)果表明:
(1)M1DCNN網(wǎng)絡(luò)通過多尺度學(xué)習(xí)振動數(shù)據(jù)的故障特征,獲得了更全面的故障特征信息,有效減小了診斷誤差;
(2)BPSO-M1DCNN網(wǎng)絡(luò)的自適應(yīng)性和魯棒性較高,能很好地減小網(wǎng)絡(luò)設(shè)計和調(diào)試的難度,具有一定的實際工程意義;
(3)在行星齒輪箱數(shù)據(jù)集中,其故障識別正確率比上述3種算法分別提高了11.7%,7.56%,6.16%,這驗證了該方法的準(zhǔn)確性和穩(wěn)定性。
但是本文BPSO算法基本參數(shù)的選取還是依靠人工經(jīng)驗確定,且診斷的故障類型集中在單一故障和兩類復(fù)合故障上。所以,自動確定BPSO算法相關(guān)參數(shù)以及診斷輕微故障和多種復(fù)合故障類型的實驗是今后的研究方向。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34