渦旋壓縮機軸向動態密封雙提前量跟蹤方法研究*
2021-10-27 08:39:52蔡炯炯張文輝倪凱華吳萱俊
機電工程 2021年10期
蔡炯炯,張文輝,倪凱華,袁 熙,吳萱俊,瞿 曉
(1.浙江科技學院 自動化與電氣工程學院,浙江 杭州 310012;2.墨爾本大學 工程與信息技術院,維多利亞州 墨爾本 3000)
0 引 言
作為一種以近直驅方式工作的容積式壓縮機,渦旋壓縮機具有壓力穩定、效率高、振動小、噪聲低、零部件少等優點[1-2]。但是由于其軸向氣體分離力作用在動渦盤上,使動渦盤發生傾斜或脫離靜渦盤,就會造成較大的氣體泄漏和零部件的摩擦和磨損,這在一定程度上限制了渦旋壓縮機的發展[3-5]。
在相同的轉速下,大容量渦旋壓縮機的排氣量更大,但是這種渦旋壓縮機存在體積大、能耗高、適用范圍小的缺點。如果能改善渦旋壓縮機的密封性,則可以使渦旋壓縮機的轉速更高、排氣量更大、應用范圍更廣。因此,漏氣問題是制約渦旋壓縮機發展的一個難點。
目前,用以改善渦旋壓縮機軸向力平衡的有針對性的方法有:(1)彈簧背壓式[6]、推力軸承式[7,8]、氣體背壓式[9]、背壓腔注入潤滑油[10-12]和軸向隨變機構[13];(2)在靜渦旋盤的背面設置密封組件,以形成背壓腔[14]。但是由于壓縮機軸向氣體分離力會隨主軸轉角的變化而呈現大幅度的變化,這些方案會因其動態響應慢,難以滿足高精度、高動態性能的氣體泄漏改善要求。
文獻[15-17]采用電磁力來平衡渦旋壓縮機的氣體分離力,提出了以誤差均方差為評價指標的自適應PID提前跟蹤算法,改善了其跟蹤滯后的缺陷[18-20],解決了該問題的主要部分。但使用該算法篩選出的最優提前角在線跟蹤時,其上升段和下降段一般總處在一段略微過于提前,可以實現密封,而另外一段略微滯后,有泄露的缺陷;在高頻時,由于其過壓余量不足,又存在泄漏風險;同時,誤差均方差指標無法判斷過壓密封狀態或欠壓密封性不足的狀態,仍需要對其作進一步的改進和優化。
本文對誤差方差和累積誤差評價的平衡特點進行分析,提出以累積誤差和均方差兩種評價方法協同;提出在上升和下降段,分別采用不同的優化提前量,進行PID動態跟蹤平衡的雙提前量控制;給出基于提前量跟蹤的自適應軸向動態密封算法;最后對該控制方法進行實驗驗證。
1 壓縮機軸向電磁動態密封平衡
1.1 軸向氣體分離力特征
在某一固定排氣壓力下,渦旋壓縮機軸向氣體分離力和主軸轉角的關系[15]366如圖1所示(此處取漸開線的圈數N=3,吸氣口壓力ps=0.8 MPa,漸開線節距P=12 mm)。
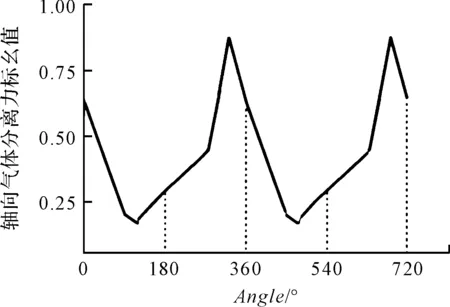
圖1 軸向氣體分離力
由圖1可知:在吸氣排氣過程中,渦旋壓縮機的軸向氣體分離力是周期性變化的曲線,軸向氣體分離力每隔360°轉角一個周期,在單位周期內具有明顯的上升坡道和下降坡道。
1.2 軸向電磁動態密封控制方案
采用帶鐵芯的電磁機構,以電磁力動態平衡軸向氣體分離力的方案[15]366,具有大力密度、快速響應的優點。
渦旋機軸向力電磁平衡方案示意圖如圖2所示。
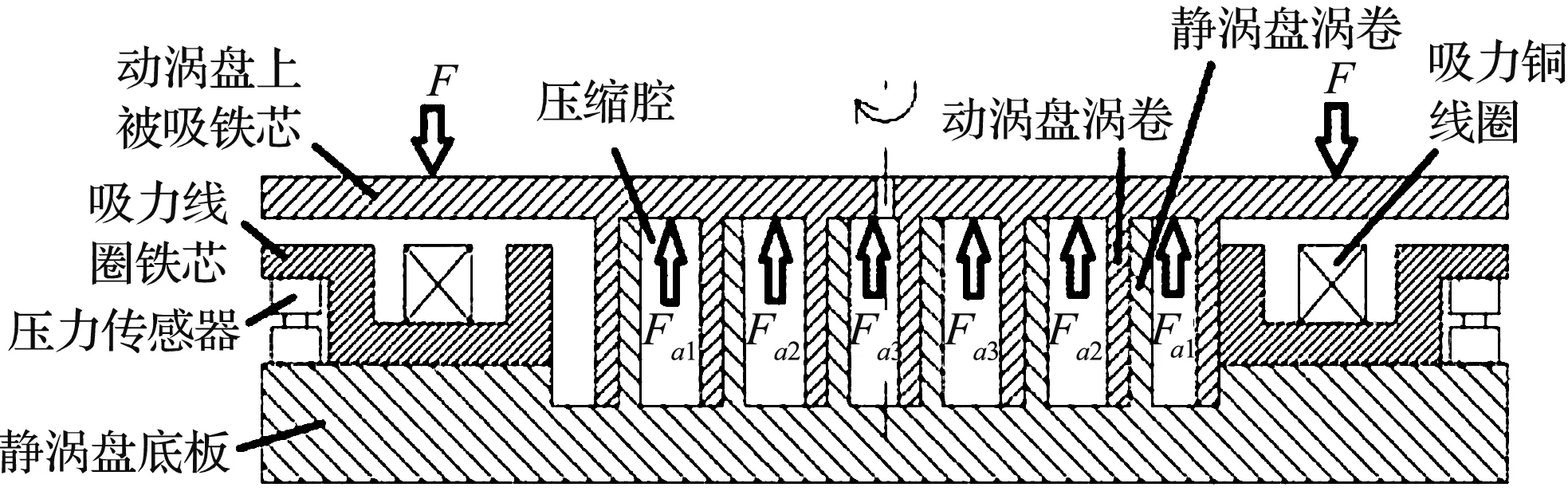
圖2 電磁平衡方案結構
雙提前量跟蹤PID方法控制框圖如圖3所示。

圖3 系統控制框圖
圖3中:在電磁鐵電磁吸力動態控制中,PID控制環節為G1(s),驅動電路可以簡化等效成慣性環節G2(s),控制對象的電流與電磁力之間的關系等效成帶延遲特性的G3(s);將其與系統的控制目標R(s),反饋量C(s)組成一個閉環系統。
閉環傳遞函數可表示為:
(1)
式中:τ—系統提前跟蹤時間最佳值。
在以離散方式執行時,嵌入式系統將體現出不同的提前步數[15]368。筆者提出在上升和下降段分別采用不同的優化提前量,以進一步優化壓縮機的軸向動態密封效果。
1.3 理想平衡效果
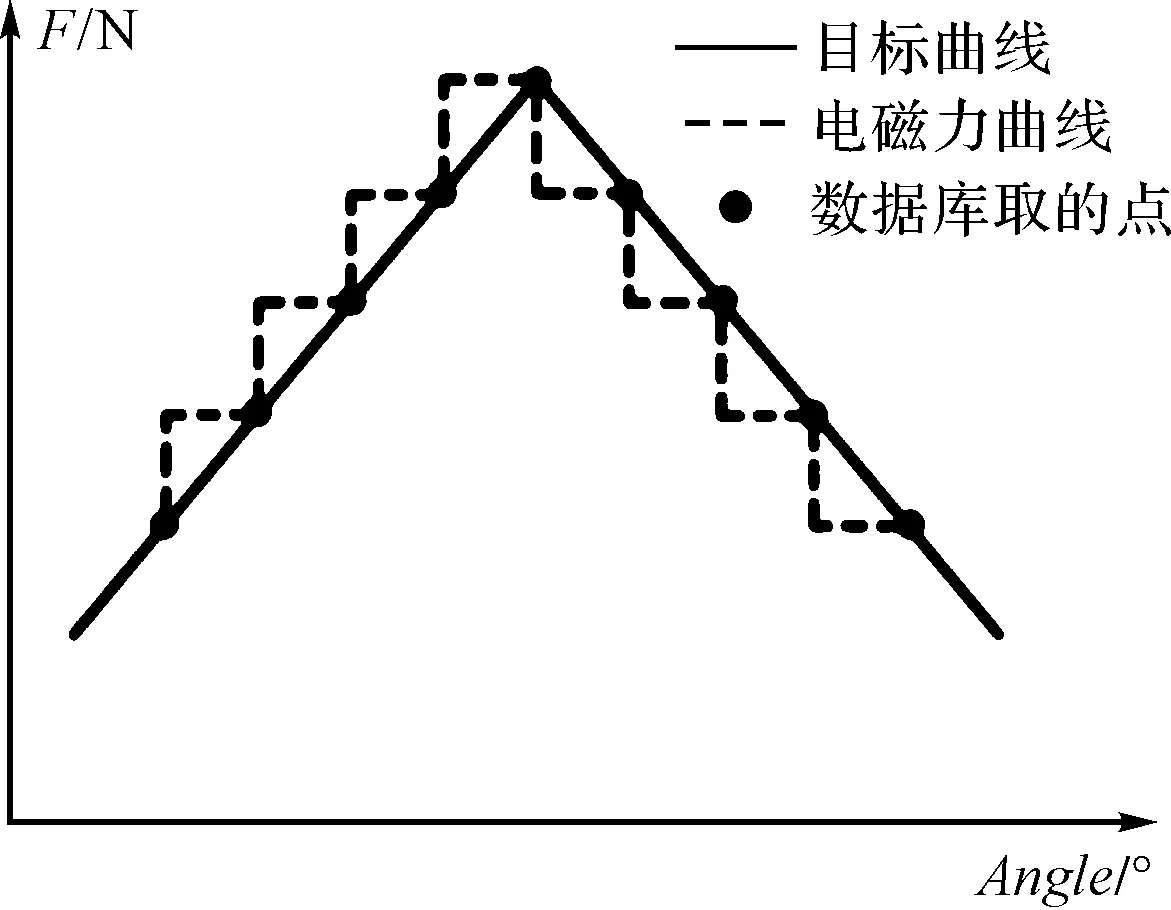
一般的控制目標如圖4所示。
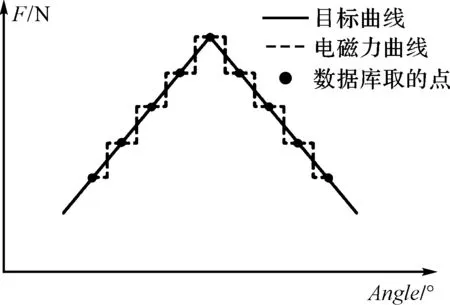
圖4 一般的控制目標
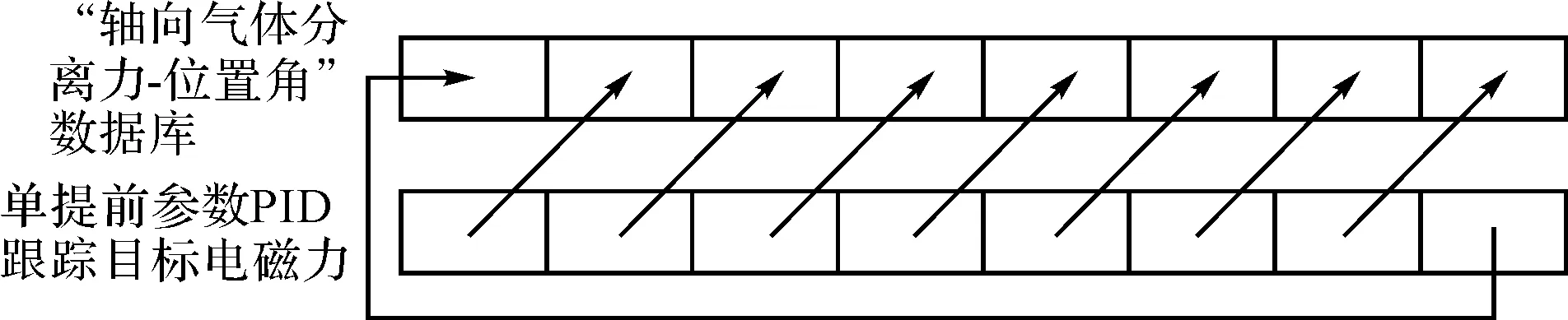
筆者將渦旋壓縮機工作時軸向力的每個周期按角度離散成n個點,建立“軸向氣體分離力-位置角”數據庫。數據庫離散點如圖4中圓點所示,實際跟蹤點數為360,與文獻[15]368中相同。為方便分析,此處簡化跟蹤對象,將離散點的點數取為9點;以PID算法跟蹤目標軸向力產生電磁力曲線(由于以大小不同的離散點為跟蹤對象,實際產生的電磁力曲線為類似階梯狀折線)。
為保證較好的軸向動態密封效果,電磁力與氣體分離力需要達到平衡。一般的控制目標是,用圖4中階梯折線電磁力來平衡圖中黑色氣體分離力。然而這樣的效果實際上無法達到,因為離散方式以實現時,嵌入式系統以目標點距為最小調整量,即總是超前或者落后一個點距;同時,電磁平衡力和目標線近似重疊的做法對確保密封也沒有足夠的余量。
實際目標的電磁力臨界曲線如圖5所示。
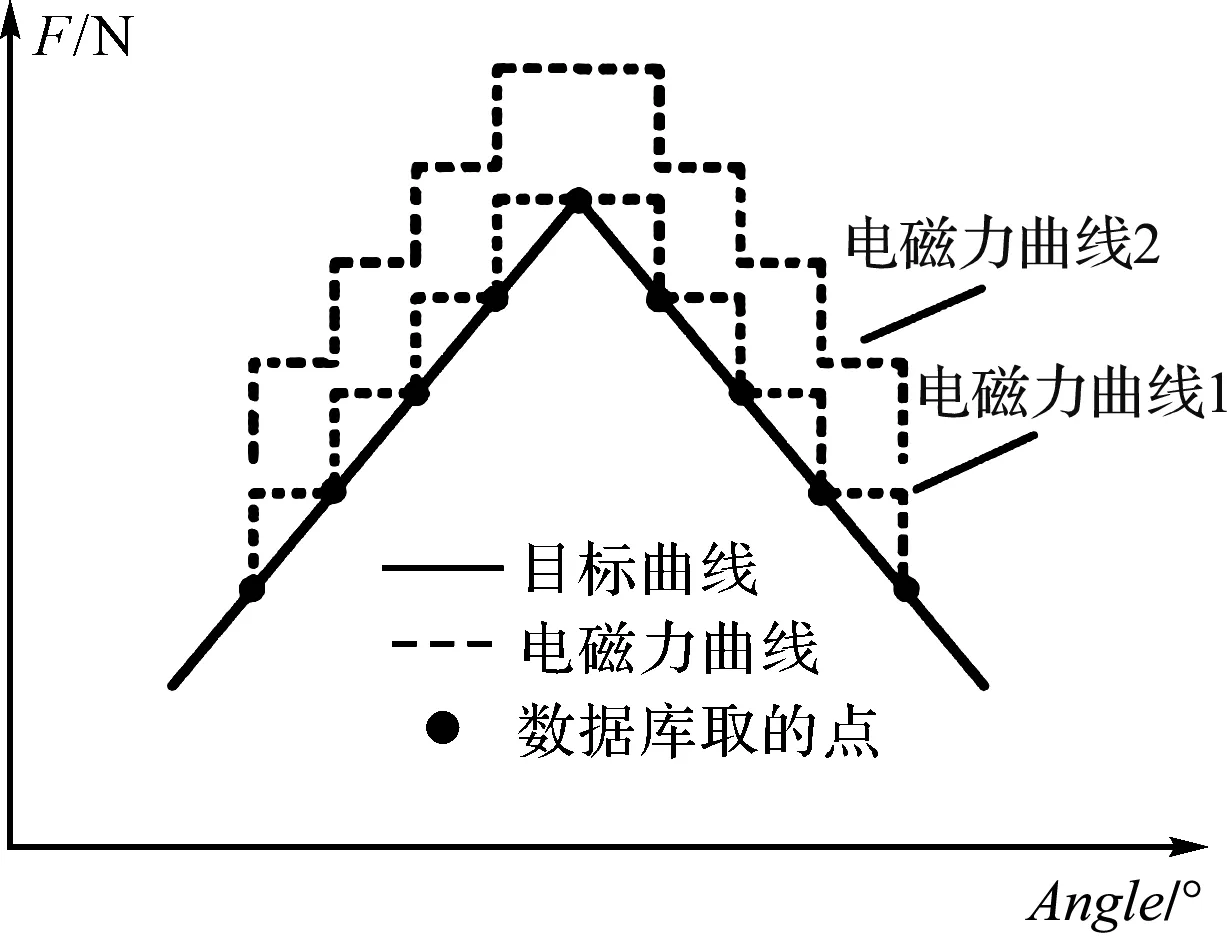
圖5 實際控制目標
圖5的實際實施過程中,是用折線1來達到大的動態效果,此時電磁力略過盈,犧牲少量磨損,但確保了系統具有最佳密封。
其中的具體過壓量要根據實際進行調整(如圖5中的折線2),但首要任務仍是找到臨界曲線1。
2 單提前參數PID控制算法
2.1 控制算法尋優
文獻[15]368是以誤差方差作為跟蹤效果的評價指標。在單提前參數PID 50 Hz的跟蹤頻率下,其最優提前步數對應的誤差方差如表1所示。
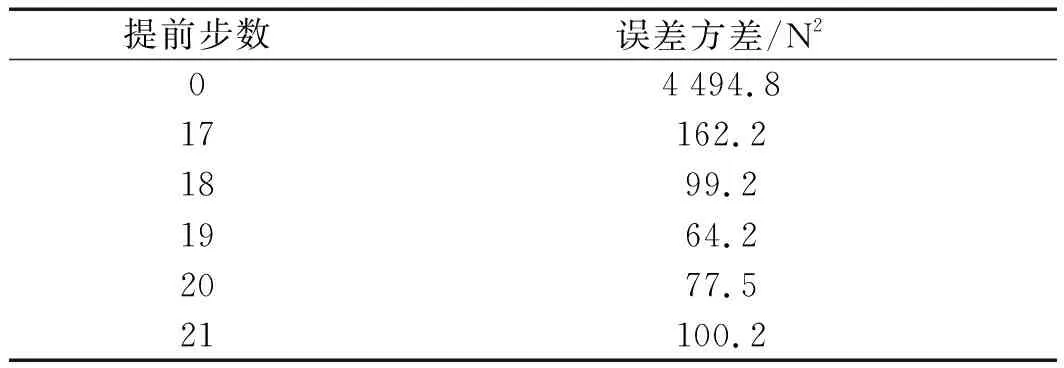
表1 50 Hz頻率尋優數據
表1中:在50 Hz下,19步為最優提前量,系統誤差方差最小,為64.2。
2.2 控制算法實際效果
最優提前量平衡的實際效果如圖6所示。
(a)略微滯后
(b)略微過于提前
由于最小調整量是1個目標點距,使用單提前參數PID最優提前量平衡效果有2種情況,即上升和下降段總是存在一段略微提前,另外一段則略微滯后。
2.3 最優提前量不足原因分析
上述不足的原因是調整量至少為1個目標點距,難以實現圖4中一般平衡效果,也無法實現圖5中曲線1的密封效果;這是使用離散數據庫的固有缺陷。
隨著跟蹤頻率的上升,單位周期內總跟蹤點數減少;電磁力曲線單側滯后導致密封性不足,高頻時因總跟蹤點數較少,漏氣趨勢更明顯。同時,圖4中的一般平衡效果在高頻時因過壓余量不足,也存在漏氣風險。
為達到最佳密封效果,此處以圖5臨界曲線1為目標;同時為確保電磁力始終略微大于軸向氣體分離力,上升段提前步數略微大于下降段。因此,需要對文獻[15]366-370中的算法及評價指標進行完善。就此,筆者提出一種累積誤差結合誤差方差的協同評價方法,及雙提前量步數搜索算法。
3 方差和累積誤差協同評價
3.1 以方差評價的平衡誤差的特點
以方差作為平衡效果的評價依據,只能確定電磁力曲線和跟蹤曲線較為接近,無法判斷最優提前量平衡效果是略微提前還是略微滯后。
3.2 基于累積誤差的平衡誤差評價
累積誤差的計算步驟如下:
(1)得到目標曲線上升、下降段轉角范圍,以便分別計算上升段累積誤差和下降段累積誤差;根據正、負斜率,將圖1中的目標曲線切分為兩個部分(上升段和下降段);設單位周期內目標曲線最小幅值處主軸轉角為MinK,最大幅值處主軸轉角為MaxK,則上升段主軸轉角范圍為[MinK,MaxK],下降段主軸轉角范圍為[0,MinK]和[MaxK,359];
(2)同步檢測主軸轉角和誤差,根據主軸轉角判斷誤差處于上升段范圍還是下降段范圍,分別計算其累積誤差。此處設:
誤差=Fa(K)-F(K)
(2)
式中:Fa(K)—目標平衡力,N;F(K)—電磁力,N。
在當前的跟蹤頻率下,設單位周期內經離散系統檢測得出的位于上升段范圍的主軸轉角為Kn1,Kn2,…,Kni,位于下降段范圍的主軸轉角為Km1,Km2,…,Kmj;計算上升段累積誤差的公式為:
(3)
式中:AllErr1—上升段累積誤差,N/°;i—單位周期內上升段誤差最大采樣次數。
計算下降段累積誤差的公式為:
(4)
式中:AllErr2—下降段累積誤差,N/°;j—單位周期內下降段誤差最大采樣次數。
(3)由于高頻時跟蹤步數較少,跟蹤誤差增大,累積誤差的計算也會有誤差,此處將20個周期的累積誤差取平均值。其中,上升段平均累積誤差公式如下:
(5)
式中:AveAllErr1—上升段平均累積誤差,N/°。
下降段平均累積誤差公式如下:
(6)
式中:AveAllErr2—下降段平均累積誤差,N/°。
累積誤差指標評價效果為:
當平均累積誤差=0時,是一般的控制效果。而實際因為調整量是按照整點距進行的,所以一般得到的是圖6的兩種效果。
平均累積誤差>0時平衡效果如圖7所示。
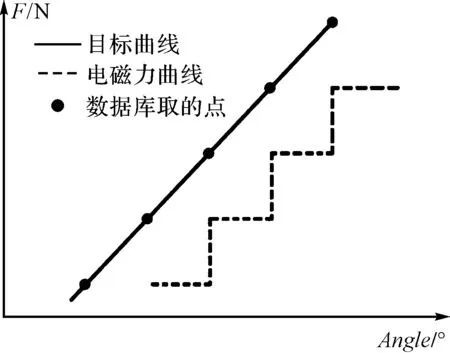
圖7 平均累積誤差>0平衡效果
電磁力總體小于軸向氣體分離力,動、靜渦盤分離趨勢會隨著平均累積誤差的增大而增大,氣體泄露程度也隨之增大。
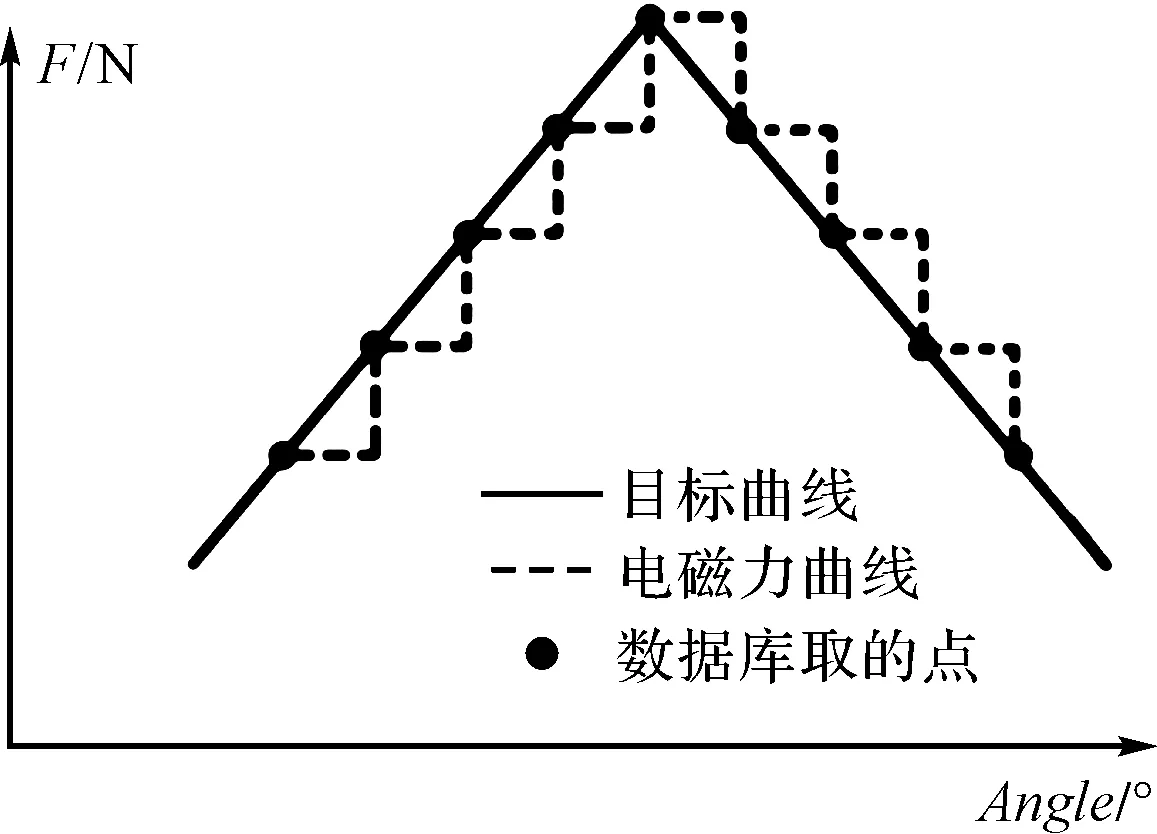
平均累積誤差<0時平衡效果如圖8所示。
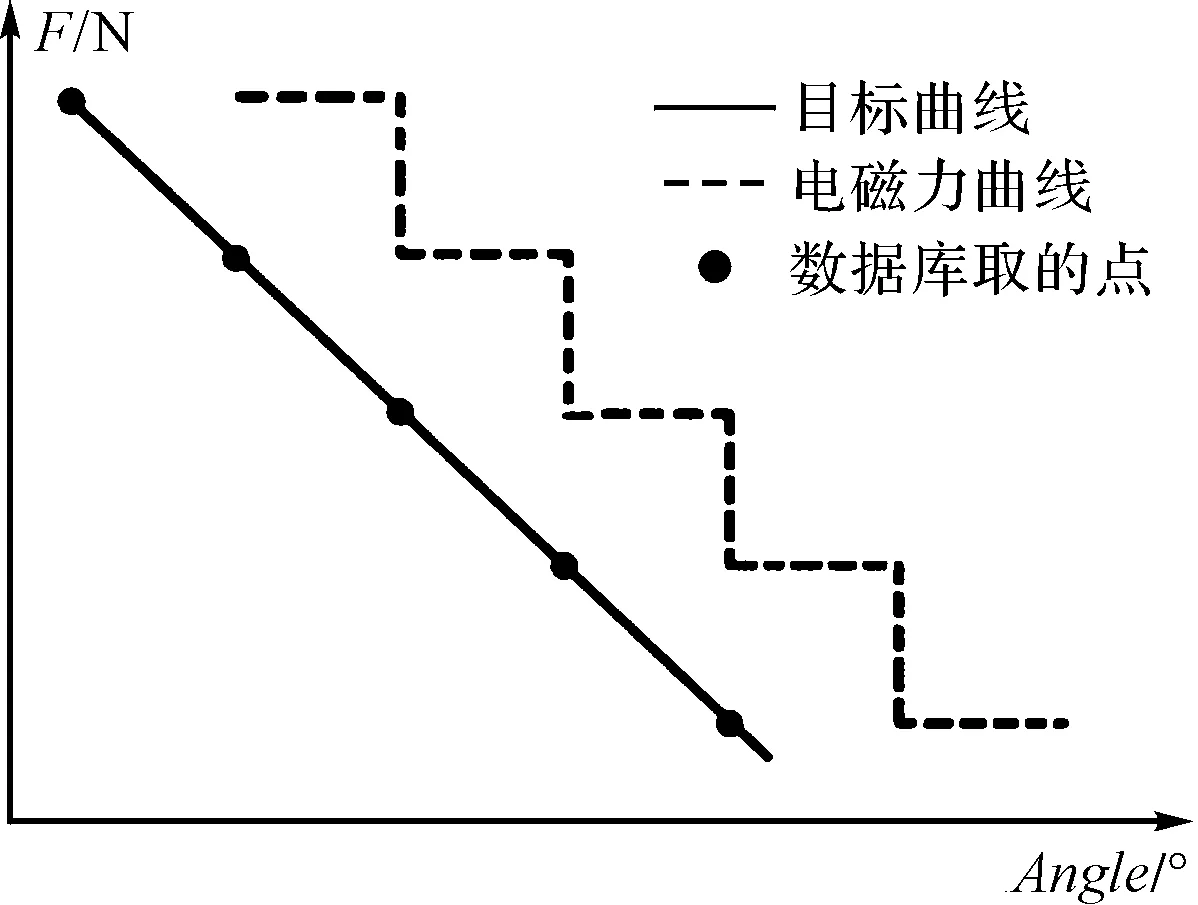
圖8 平均累積誤差<0平衡效果
電磁力總體大于軸向氣體分離力,動靜渦盤接觸趨勢會隨著平均累積誤差絕對值的增大而增大,動靜渦卷磨損程度也隨之增大。因此,以累積誤差作為評價平衡效果的標準,可判斷出其過壓或者密封性不足。
50 Hz跟蹤累積誤差和提前步數數據如表2所示。
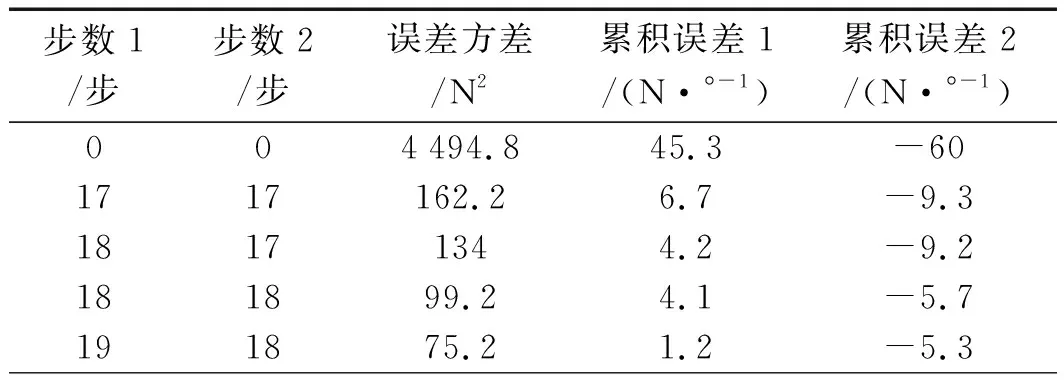
表2 50 Hz跟蹤累積誤差和提前步數數據
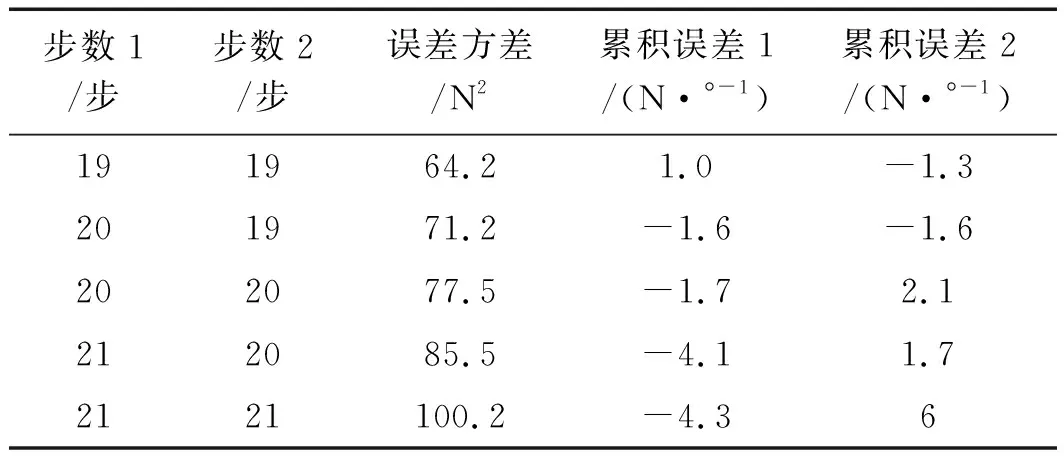
(續表)
步數1—上升段提前步數;步數2—下降段提前步數;累積誤差1—上升段平均累積誤差;累積誤差2—下降段平均累積誤差
表2中,上升、下降段提前步數均為19步,即單提前參數PID的最優提前步數;上升段平均累積誤差為1.0,密封性略微不足,下降段平均累積誤差為-1.3,略有過壓;實際平衡效果如圖6(a)所示。
不同頻率以累積誤差篩選得到的匹配值如表3所示。
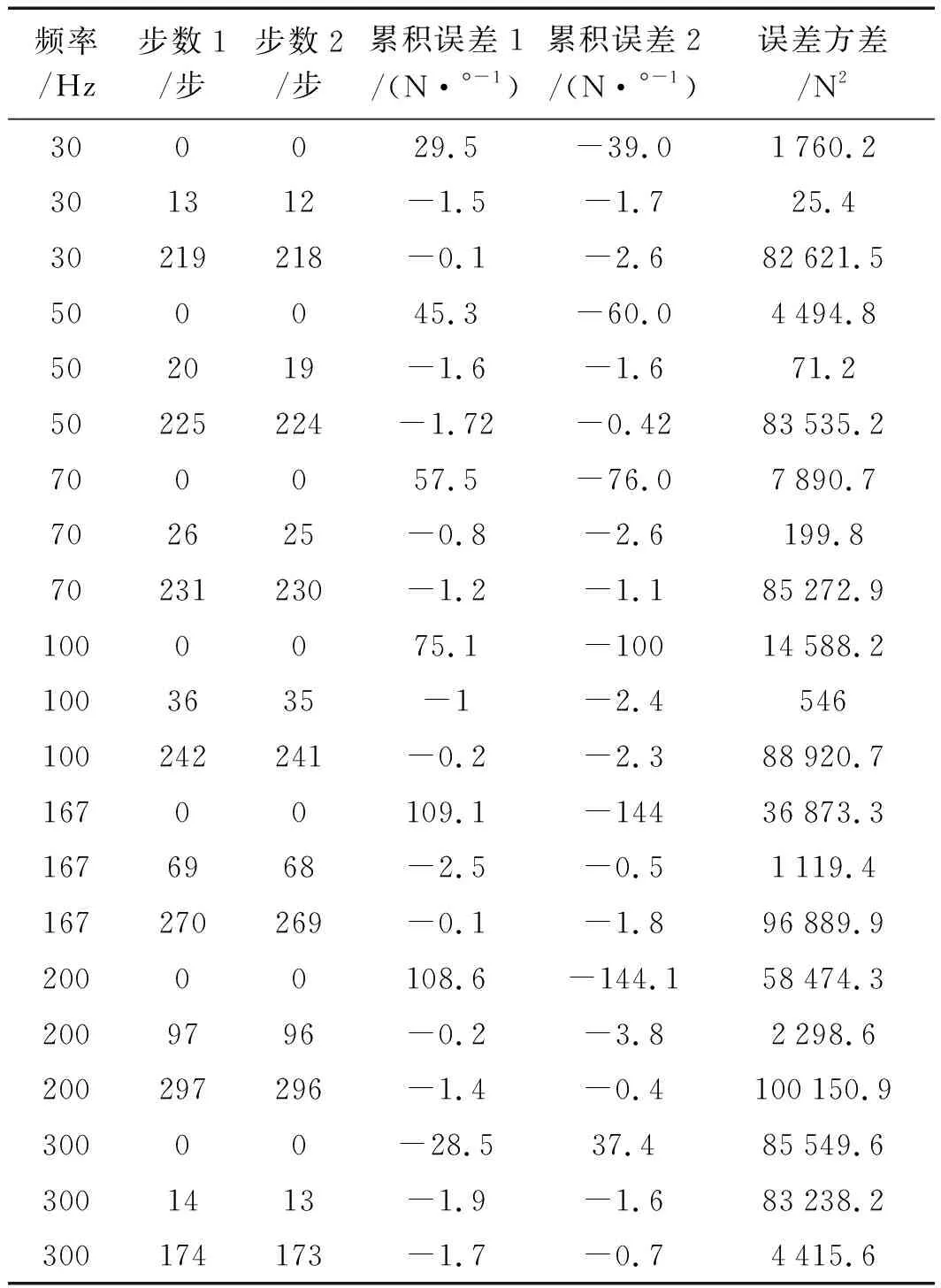
表3 不同頻率篩選得到的匹配值
步數1—上升段提前步數;步數2—下降段提前步數;累積誤差1—上升段平均累積誤差;累積誤差2—下降段平均累積誤差
表3中,以上升、下降段平均累積誤差略微小于零為指標尋優,不同頻率單位周期內會得到2個匹配值。
跟蹤頻率為300 Hz時,經篩選匹配到的兩種平衡效果如圖9所示。
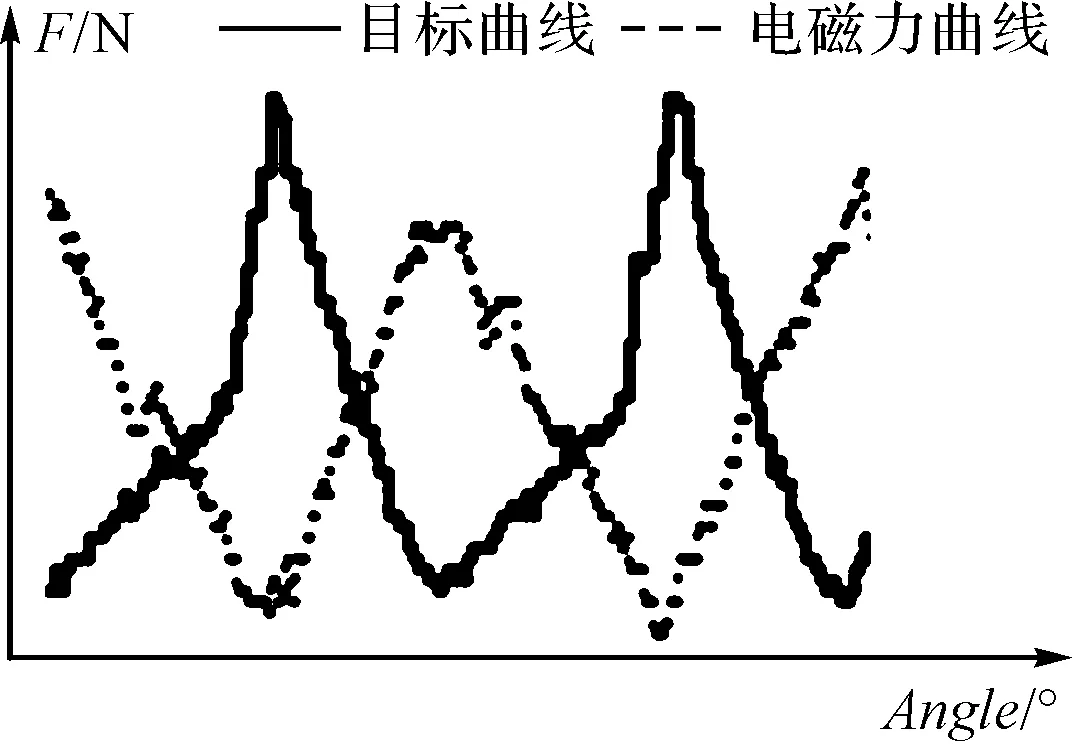
(a)上升段提前步數14,下降段提前步數13
(b)上升段提前步數174,下降段提前步數173
圖9中,平衡效果上升、下降段平均累積誤差皆為大小較接近的負值。因此,無法僅從累積誤差來進行評價,需要結合誤差方差指標來協同評價。
3.3 誤差方差和累積誤差協同評價
誤差方差和累積誤差協同評價可同時篩選出電磁力曲線較接近目標曲線,且滿足平衡效果略微過盈的目標提前量,可排除提前量,篩選出最優提前量。
協同計算方法為:先初步搜索上升段和下降段的平均累積誤差<0的提前量,再以誤差方差為指標,進一步篩選出誤差方差最小的提前量。
4 雙提前量軸向動態密封算法
由于單提前量PID算法存在不足,筆者提出一種基于雙提前量的動態平衡控制方法,并提出累積誤差結合誤差方差的協同評價方法。
4.1 基于雙提前量的動態平衡控制
為提供更高的壓力余量,確保電磁力略大于軸向氣體分離力,設置上升段提前步數為略微大于下降段。
單提前參數PID算法與雙提前參數PID算法提前步數的對比圖,如圖10所示。
(a)單提前參數PID跟蹤目標
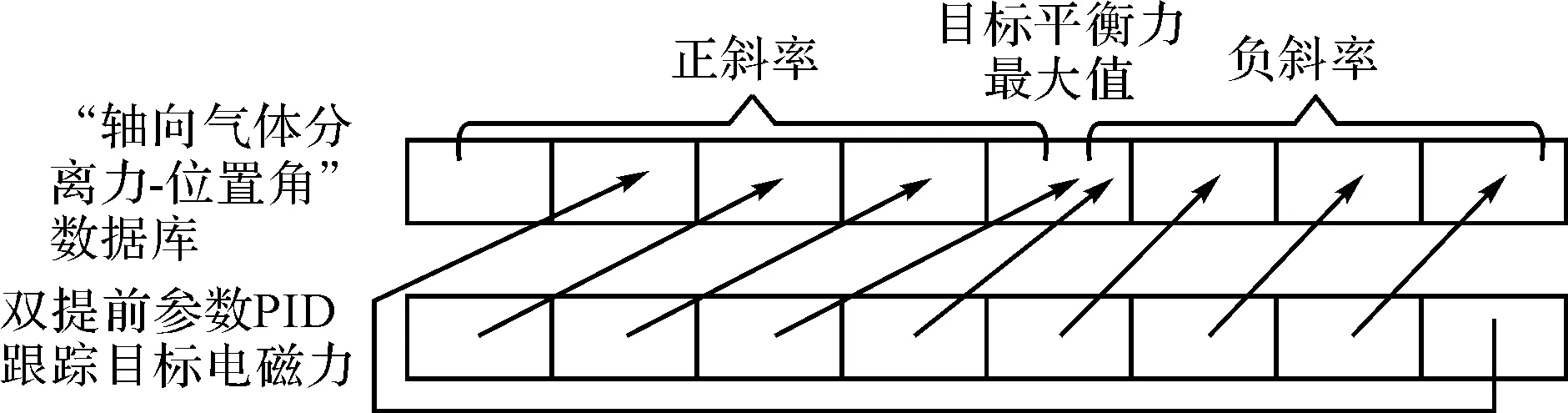
(b)雙提前參數PID跟蹤目標
設M=上升段提前步數-下降段提前步數。圖10中,雙提前量步數搜索算法會使總跟蹤點數減少,跟蹤誤差變大,因此,M越小越好。
4.2 自適應軸向動態密封算法
基于雙提前跟蹤量的軸向動態密封流程包括:離線建立數據庫和在線自適應跟蹤。
雙提前量離線數據庫的建立流程如圖11所示。
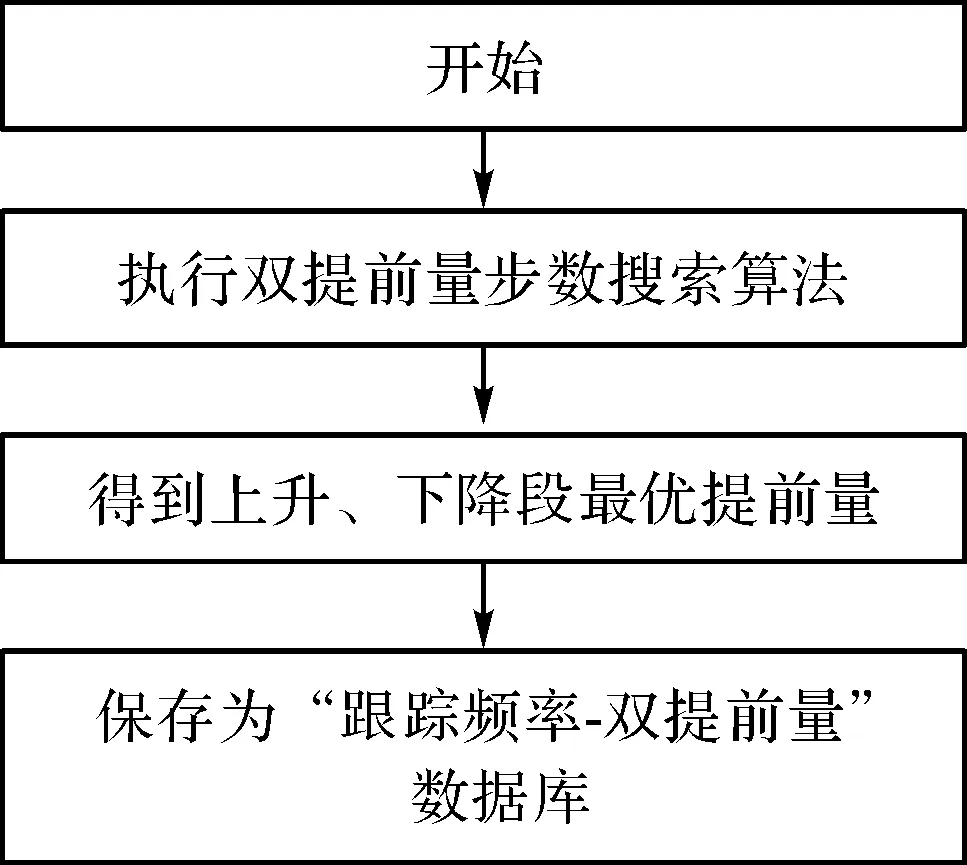
圖11 雙提前量離線數據庫建立流程
離線數據庫建立階段目標是:采集各個跟蹤頻率下最優提前量,建立“跟蹤頻率-雙提前量”數據庫。
雙提前量在線自適應跟蹤流程圖如圖12所示。

圖12 雙提前量在線自適應跟蹤流程
系統剛運行時,根據實時反饋的轉速信號設置系統跟蹤頻率,根據跟蹤頻率查詢數據庫自適應匹配最優提前量。
4.3 離線雙提前量步數搜索算法
雙提前量步數搜索算法流程圖如圖13所示。
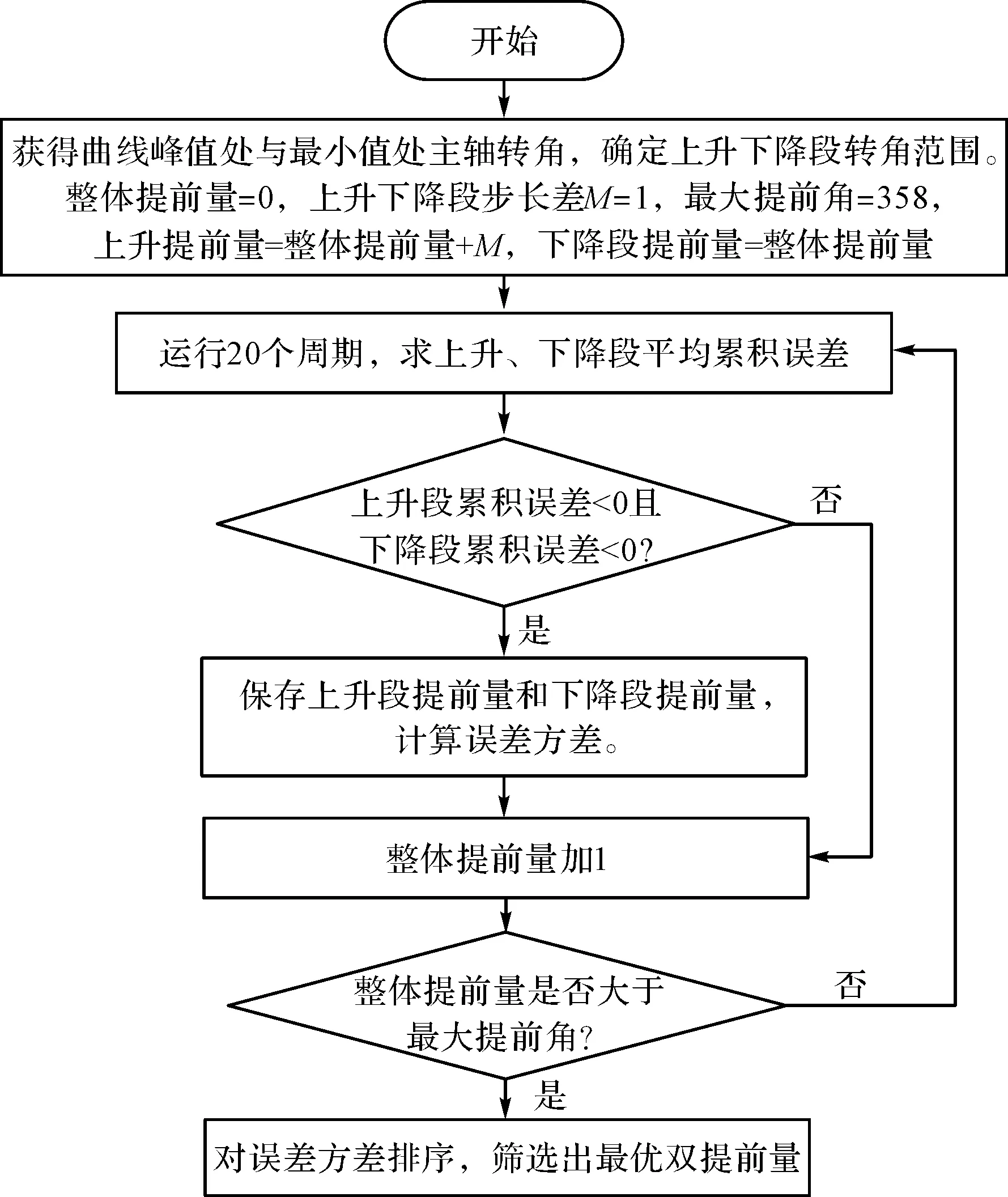
圖13 離線雙提前量步數搜索算法流程
4.4 基于雙提前量的在線跟蹤方法
雙提前量在線自適應跟蹤流程圖如圖14所示。
圖14中,系統可實時獲取當前主軸轉角,根據主軸轉角位于上升段還是下降段轉角區間,匹配相應的提前量。
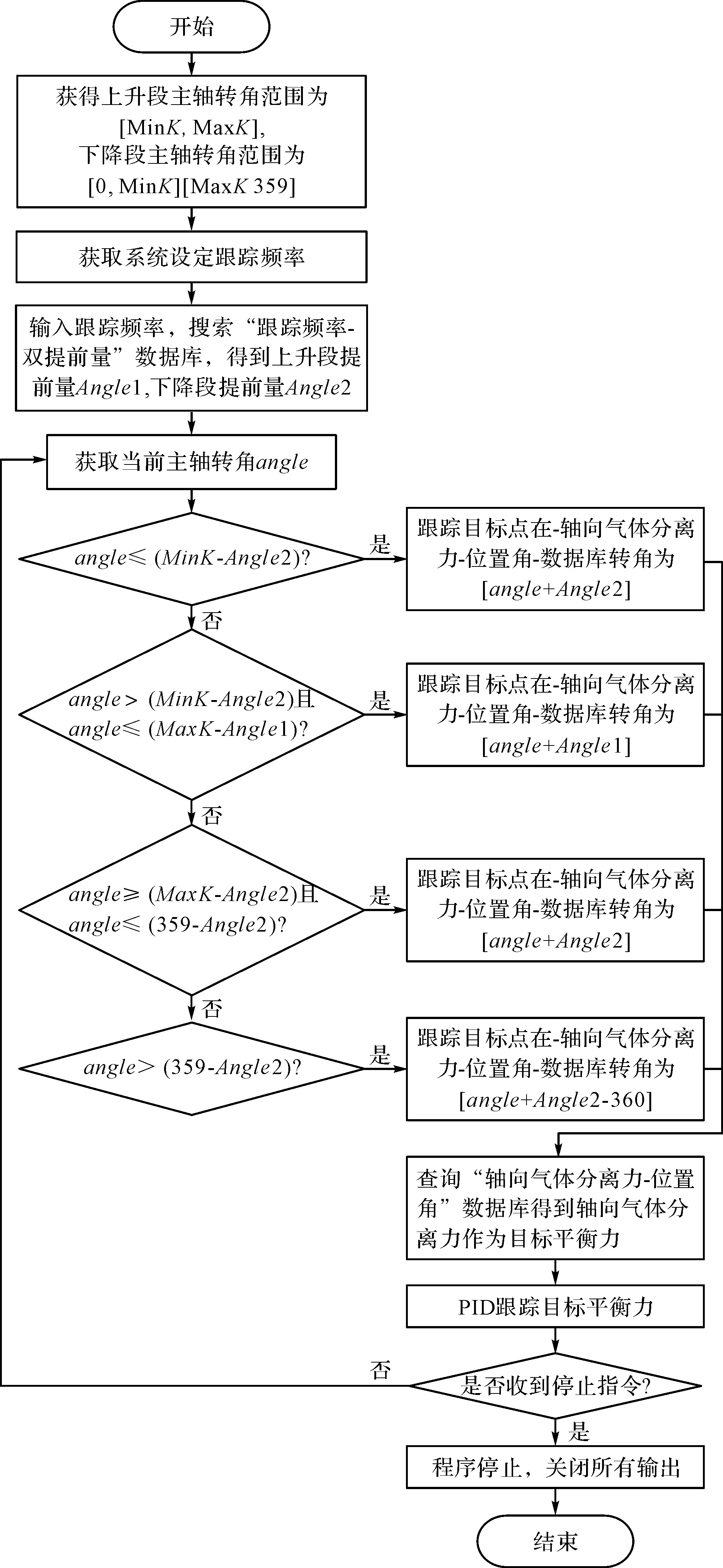
圖14 雙提前量在線自適應跟蹤流程圖
5 實驗和結果分析
渦旋壓縮機的軸向力電磁平衡方案,是以軸向氣體分離力為跟蹤目標,通過電磁吸力值來實時調整電磁線圈電流(電磁吸力),以平衡氣體分離力,實現電磁力略微過盈狀態下的壓縮機動態接觸密封。
筆者搭建了半實物實驗平臺(實驗系統沒有壓縮腔,其余動態電磁吸力機構參數與完整系統一致)對方案進行模擬驗證,如圖15所示。

圖15 半實物實驗平臺概況
模擬平臺參數如表4所示。
表4 半實物實驗模擬平臺參數
筆者分別針對30 Hz,50 Hz,70 Hz,100 Hz,167 Hz,200 Hz,300 Hz不同跟蹤頻率進行了驗證。各跟蹤頻率下的最優提前步數如表5所示。
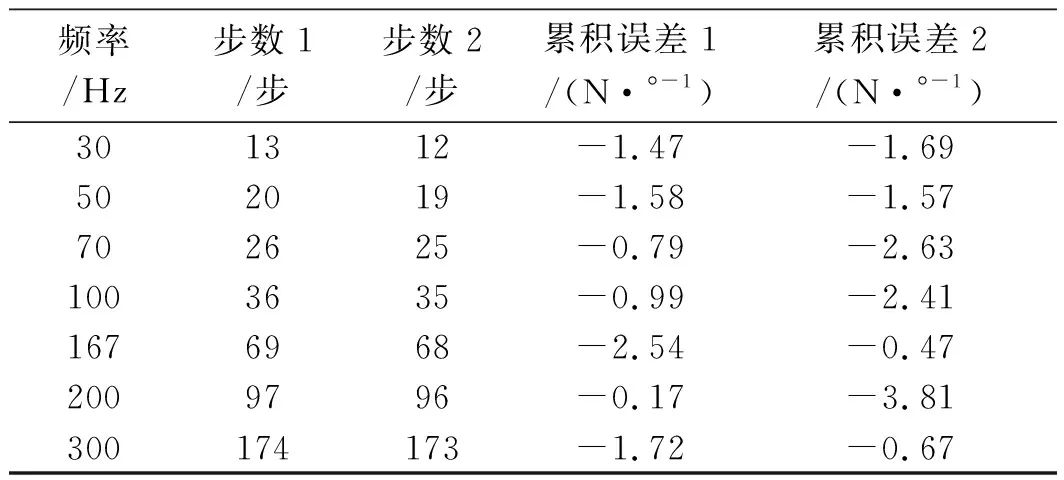
表5 各個跟蹤頻率下尋優結果
步數1—上升段提前步數;步數2—下降段提前步數;累積誤差1—上升段平均累積誤差;累積誤差2—下降段平均累積誤差
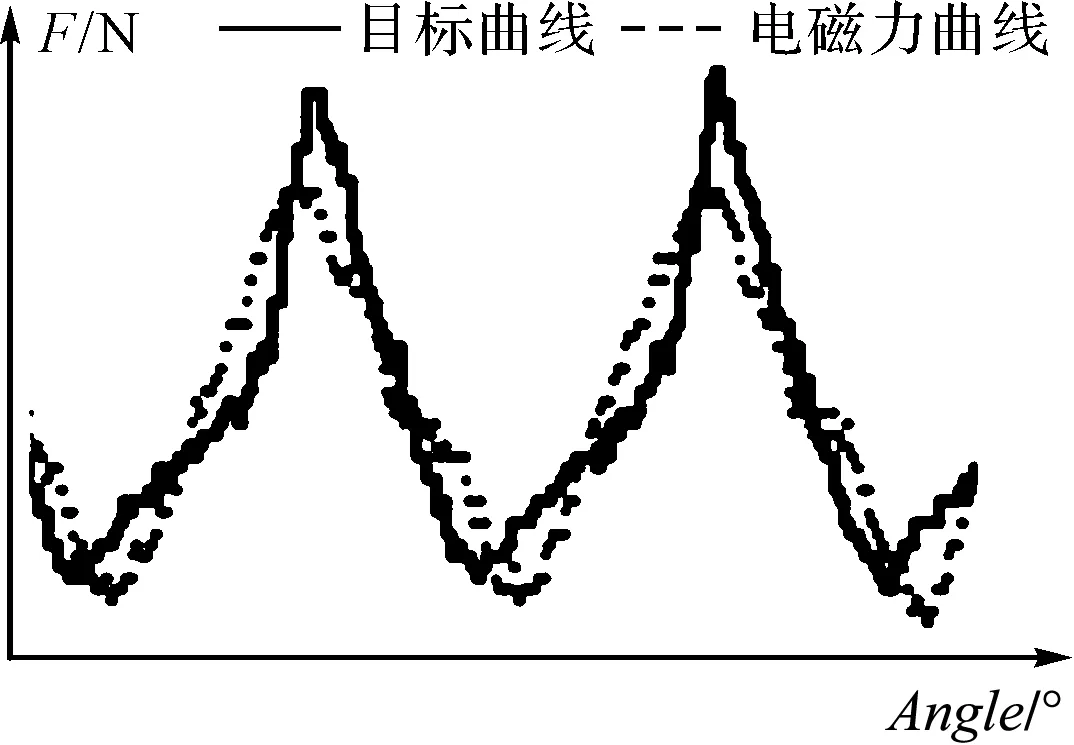
跟蹤頻率為50 Hz時的平衡效果如圖16所示。
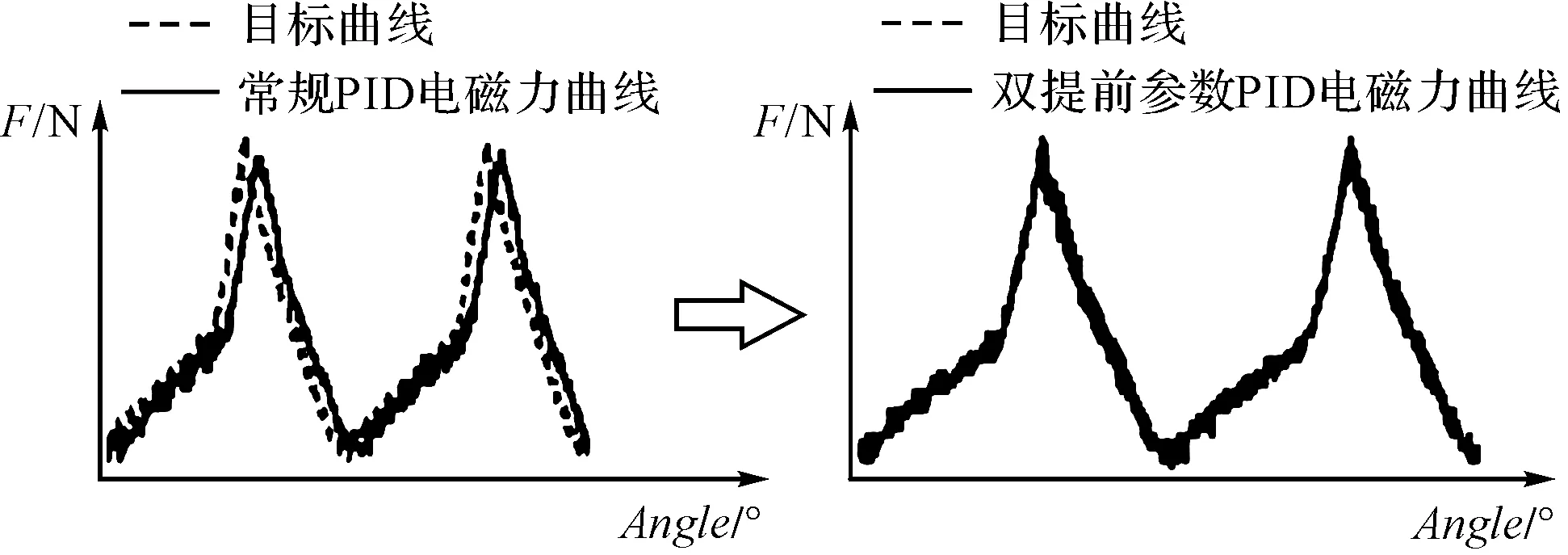
圖16 50 Hz平衡效果
平臺200 Hz的平衡效果如圖17所示。
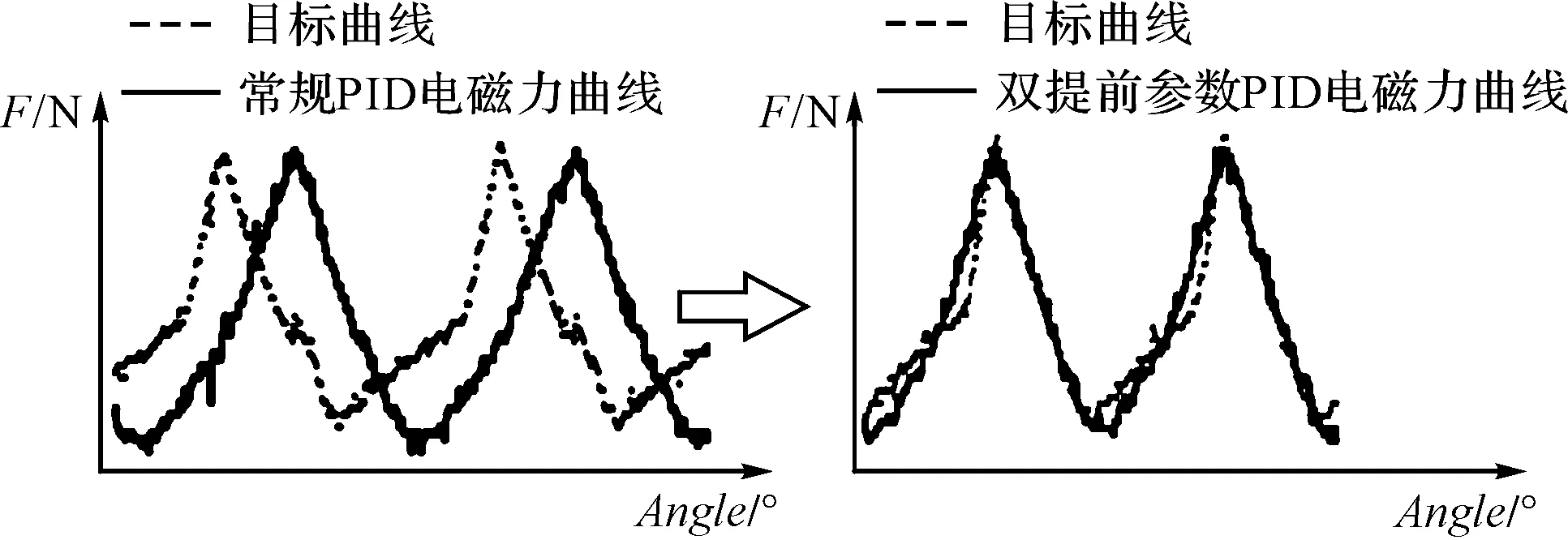
圖17 200 Hz平衡效果
由圖(16,17)結果可知:最優提前量隨跟蹤頻率增加而增加;該算法可以針對不同跟蹤頻率自動尋優最佳提前量,增加系統密封性和穩定性。
6 結束語
為改善渦旋壓縮機的軸向力動態平衡問題,進而改善渦旋壓縮機的動態密封,筆者在電磁機構產生電磁力快響應動態平衡方案的基礎上,對誤差方差和累積誤差評價的平衡特點進行了分析,針對單提前參數PID最優提前量平衡效果的不足,提出了以累積誤差結合誤差方差協同評價的雙提前量步數搜索算法,并以半實物試驗驗證了壓縮機的動態電磁平衡效果。
研究結果表明:
(1)以累積誤差結合誤差方差協同評價,不僅可以判斷跟蹤匹配程度,還可以判斷出略過壓密封狀態或略欠壓密封性不足狀態;
(2)離線階段,對不同跟蹤頻率,采用雙提前量步數搜索方法同樣可以較好地自動尋優提前步數;
(3)在線跟蹤階段,雙提前參數動態平衡方法可以確保全程以略過盈壓力狀態實現更好的動態密封效果,高頻時比單參數提前的優勢作用更明顯。
在后續的研究工作中,筆者將對不同跟蹤頻率下的最佳過壓余量展開研究,以實現渦旋壓縮機更好的動態密封效果。