船舶電力系統的故障診斷及處理研究
2021-10-28 06:41:50桂永勝張志遠杜羅娜
船電技術 2021年10期
桂永勝,張志遠,杜羅娜
船舶電力系統的故障診斷及處理研究
桂永勝1,張志遠2,杜羅娜2
(1. 海裝駐武漢地區第二軍事代表室,武漢 430064;2. 中國艦船研究設計中心,武漢 430064)
介紹了一種船舶電力系統監控架構,針對該監控架構提出故障診斷及處理策略,將電力系統的故障分為直流幅壓電網故障、交流電網故障和直流24 V電網故障,給出不同故障診斷的依據及判斷部位。針對不同故障,提出不同的處理措施,當供電支路發生過載或短路故障時,通過分級保護實現供電支路的隔離;當電源發生故障停機時,通過電力系統拓撲結構改變,實現故障重構,恢復未故障區域供電。該故障診斷及處理策略能夠滿足電力系統自主運行的需求,適用于無人艦船。
故障診斷 分級保護 故障重構 自主運行
0 引言
船舶的無人化是當今世界船舶行業的一個重要發展方向。船舶的無人化要求船舶電力系統更加智能化、信息化。通信技術、控制技術、電力技術等相關行業的發展為電力系統實現智能化和信息化提供了可能[1]。
船舶電力系統的主要動力來自蓄電池、柴油發電機等設備。船舶電力系統的主要輔機,即電網用戶,包括泵、風機、電子設備等。船舶電力系統通過直流斷路器、交流斷路器、DC/AC電源、DC/DC電源等設備實現電力系統的輸配電,將蓄電池、柴油發電機等設備的輸出電壓轉換為船舶電力系統用戶需要的電制。同時,利用直流斷路器、交流斷路器實現電力系統的分級保護功能[2]。
電力系統在運行過程中,電力系統的組成設備,如蓄電池、斷路器、DC/AC電源、DC/DC電源等,一旦發生故障,會造成某個或部分電力系統用戶失電。目前,船舶電力系統主要通過電力系統監控設備進行故障后的分析,而電力系統監控設備只能記錄穩態數據,數據的采集頻率低,約為1 Hz左右,難以真實地復現電力系統發生故障時的狀態。并且,電力系統發生故障后,需要人員去進行判斷和操作,從而盡可能地恢復失電設備的供電。且斷路器需要手動操作,非常耗時。
船舶電力系統的網絡調度自動化是新近發展的一項能有效提高供配電系統安全運行能力及可靠性的技術[3]。中央計算機為整個系統的核心,對每一個終端計算機進行尋址通信,采集相關信息,將其按邏輯方程解算,然后把解算結果的信息指令通過數據總線傳遞到相應終端計算機,控制負載的通斷。本文介紹的船舶電力系統通過應用自動控制技術、通信技術、高頻采集技術等實現電力系統的自主運行、故障診斷和故障處理。
1 船舶電力系統架構
圖1是本文設計的船舶電力系統架構簡圖,該電力系統主要由直流幅壓電網、50 Hz交流電網、直流24 V電網構成。直流幅壓電網主要由蓄電池組、直流配電設備、推進電機控制板、推進電機等構成。直流幅壓電網主要負責向推進電機、船舶直流輔機用戶、船舶逆變電源、直流24 V UPS等供電。50 Hz交流電網主要由逆變電源、配電設備、變壓器等構成,主要負責向船舶交流輔機用戶供電。直流24 V電網主要由直流24 V UPS、配電設備等構成,主要負責向船舶直流24 V 輔機用戶供電。
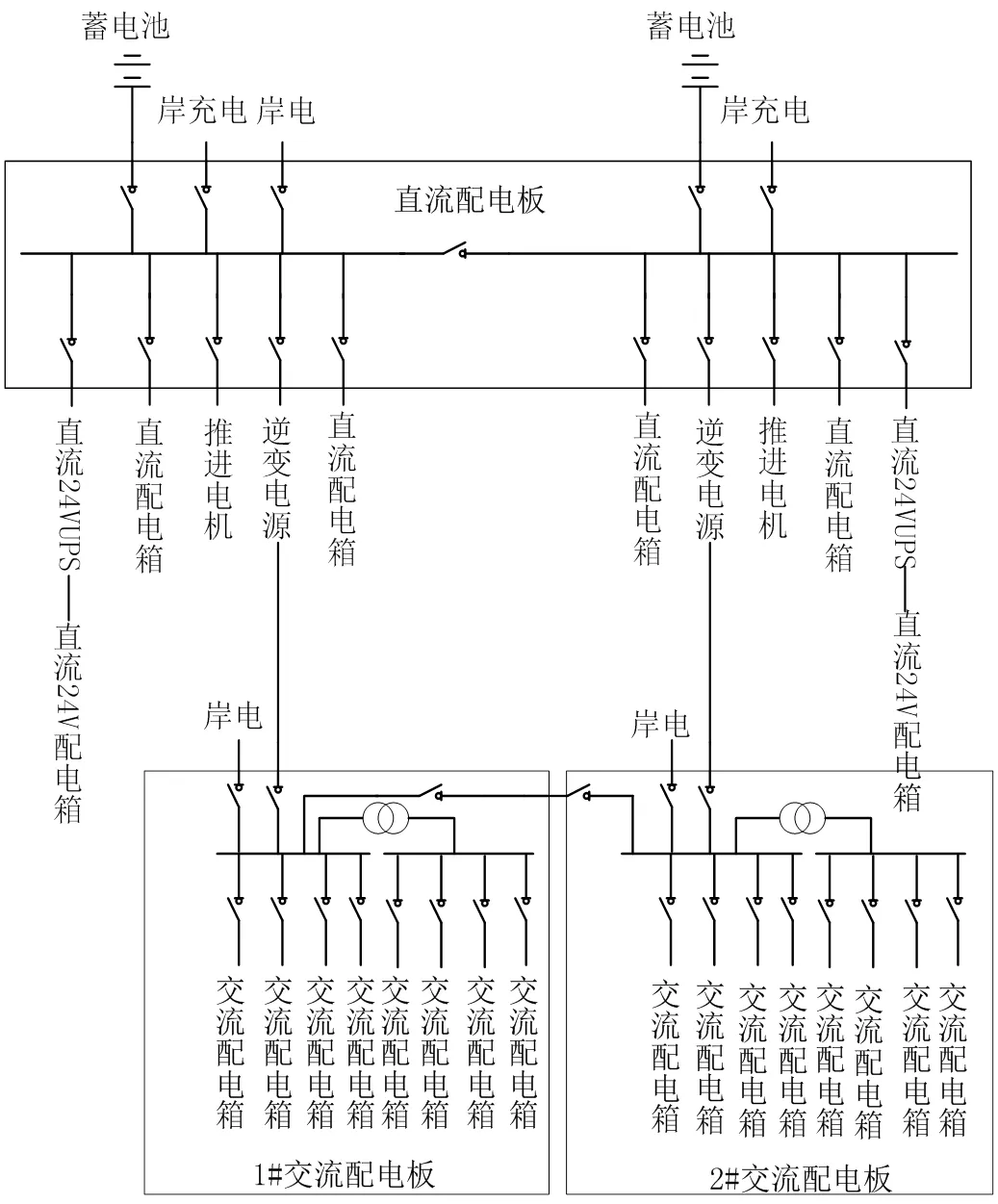
圖1 船舶電力系統架構
本文所述電力系統的左舷和右舷正常工況下一直保持獨立,即母聯斷路器一直保持斷開。對于直流幅壓電網,正常工況下,由兩組蓄電池分別向左舷和右舷的直流輔機用戶、推進電機、逆變電源以及直流24 V UPS提供直流電。當一舷的蓄電池組出現故障,由另外一舷的蓄電池組為全船用電負荷供電。對于50 Hz交流電網,正常工況下,由兩臺逆變電源裝置分別向兩舷的交流用戶供電,當一臺逆變電源裝置故障或失電時,由另外一臺逆變電源裝置為全船交流用戶供電。對于直流24 V電網,當一舷的直流24 V UPS故障或者無法供電時,由另外一舷的直流24 V UPS為全船直流24 V用戶供電。
2 船舶電力監控系統設計
根據所述電力系統架構,設計了圖2所示的電力監控系統架構。為了實現對直流幅壓主干網絡和50 Hz交流電網主干網絡的信號采集,在直流配電板和交流配電板的各個支路布置了霍爾電流傳感器,在直流配電板和交流配電板的母排和電源進線端布置了霍爾電壓傳感器。圖2所示的錄波采集箱內的錄波采集模塊內置模擬量采集板卡和開關量采集板卡,能夠將霍爾傳感器輸出的模擬量信號和斷路器自帶的輔助觸點信號轉換為數字量信號。同時,錄波采集模塊通過內置的CPU模塊將上述數字量信號在CPU模塊的內存中不斷的進行判斷和刷新,一旦上述數字量信號滿足故障判據,便將故障點前后一段時間內的數據按照40 kHz的采集頻率存入CPU模塊內的硬盤中。如果上述數字量信號不滿足故障判據,則將送入CPU模塊內的數字量信號按照1 kHz的采集頻率存入CPU模塊的硬盤內。
電力系統的主要電源設備包括兩臺直流24V UPS和兩臺逆變電源。逆變電源能夠通過CAN總線向外部發送自身的電壓、電流、頻率信息、工作狀態,同時逆變電源自身能夠根據設備內部的采集裝置進行故障判斷,能夠識別的主要故障包括過載、過壓、輸入絕緣低、輸出絕緣低、過熱、輸入欠壓、逆變裝置輸出是否短路等故障,上述故障信息能夠通過CAN總線發送到圖2所示的錄波采集箱內的CANHub。直流24 V UPS能夠通過CAN總線向外部發送自身的電壓、電流、工作狀態等信息,同時直流24 V UPS自身設置了監控模塊,該監控模塊能夠識別UPS裝置本身的輸出過載、輸出過壓、輸入過壓、輸入欠壓、過溫、輸出短路等故障。另外,UPS裝置本身采用模塊化設備,因此監控模塊還設置了與UPS裝置各個電源模塊之間的通訊故障,一旦某個模塊損毀或故障。上述的UPS裝置故障均能通過自身的CAN通訊發送至圖2所示的錄波采集箱內的CANHub。
電力系統的主要配電設備包括直流配電板、交流配電板、直流配電箱、交流配電箱、直流24 V配電箱。直流配電板和交流配電板主要電量信息均通過霍爾傳感器進行采集,并由錄波采集模塊進行A/D轉換、故障判斷及存儲。直流配電箱、交流配電箱通過內置的PLC及傳感器實現對電壓、電流以及開關狀態信息的采集,直流24 V配電箱通過內置的采集電路實現對電壓、電流以及開關狀態信息的采集,直流配電箱、交流配電箱、直流24 V配電箱通過CAN總線將采集的信息送至錄波采集箱內的CANHub。
為了實現對電力系統蓄電池組的監測,電力監控系統配置了一套蓄電池監測裝置。蓄電池監測裝置能夠實現對蓄電池組的總電壓、總電流、剩余電量等的監測,同時也能實現對每塊蓄電池的電壓及溫度的監測。蓄電池監測裝置能夠根據監測到的蓄電池電壓和溫度對蓄電池狀態進行判斷,當蓄電池的電壓或者溫度超出閾值時,蓄電池監測裝置即認為此蓄電池為故障。蓄電池監測裝置能夠判斷出當前狀態下的總的故障電池數目,并將蓄電池的故障數、蓄電池組的電壓、蓄電池組的電流等信息通過以太網發送至能量管理柜。
為了實現對電力系統絕緣狀態的檢查,電力監控系統配置了一套絕緣監測裝置。該絕緣監測裝置由一套直流絕緣監測裝置和兩套交流絕緣監測裝置構成。其主要功能有:(1)在線測量直流電網和交流電網在正常工作工況下的供電網絡及各個支路的絕緣電阻,并將測量結果通過CAN通訊傳輸給能量管理柜;(2)接收能量管理裝置離線絕緣測量指令,離線測量直流配電板主動力蓄電池組斷路器進線支路及各個用電支路的絕緣電阻,離線測量交流配電板進線支路及各個用電支路的絕緣電阻,并將測量結果通過CAN通訊傳輸給能量管理柜;(3)當電網絕緣電阻低于預設值時,自動啟動故障支路定位功能,判斷故障負載支路并通過狀態燈顯示,同時給能量管理柜發送報警信息及故障支路。
錄波采集模塊對電壓電流信息、開關狀態信息進行存儲、分析和故障判斷后,并將結果通過以太網發送到顯控模塊(PCM)和控制模塊。顯控模塊采集以太網和CAN網的所有信息以及通過顯控模塊觸摸屏本身下發的控制指令信息進行存儲,同時將本身所能采集到的所有信息發送給上級的綜合控制系統。控制模塊作為邏輯處理中心,接收來自能量管理柜本身的控制部位和控制模式指令、來自顯控模塊的控制指令、來自綜合控制系統的控制指令以及其他參與邏輯處理的其他CAN通信設備和以太網通信設備。

圖2 電力監控系統架構
3 船舶電力系統故障診斷及處理
根據電網類型,將電力系統的故障分為三類:直流幅壓電網故障、交流電網故障、直流24 V電網故障。
3.1 直流幅壓電網
直流幅壓電網故障主要分為電源故障和供電支路故障。電源故障是指蓄電池組發生故障,電壓超出正常供電電壓,部分電池溫度過高,無法正常工作,需要及時切除故障電池,減少蓄電池放電電流,從而避免電池故障擴大化,而為了保障電力系統的正常運行需要進行直流幅壓電網故障重構。供電支路故障是指供電支路出現過載或者短路,為了避免支路故障擴大化,實現故障隔離,需要及時切除故障支路。
蓄電池組是電力系統最重要的動力來源,電力系統正常運行時,1號蓄電池組和2號蓄電池組分別給左、右舷電網供電,供電拓撲結構詳見圖3,每塊蓄電池頂部都配備了蓄電池監測模塊,實時監測蓄電池電壓和溫度,當監測到電壓和溫度超出正常范圍后,上傳故障信息,蓄電池監測裝置主機匯總故障電池個數,監測電池組總電壓,當故障電池數量超出一定數量時,電池組總電壓范圍超過直流幅壓用戶設備正常工作電壓,不滿足直流幅壓電網的電壓要求,需要及時切除故障電池組,能量管理裝置判斷另一組蓄電池組故障數低于要求值,電壓滿足并聯供電要求后,下發直流配電板內故障蓄電池組供電開關分斷指令,同時閉合直流配電板內母聯開關,實現單組蓄電池組給左右舷電網供電,供電拓撲結構如圖4所示。
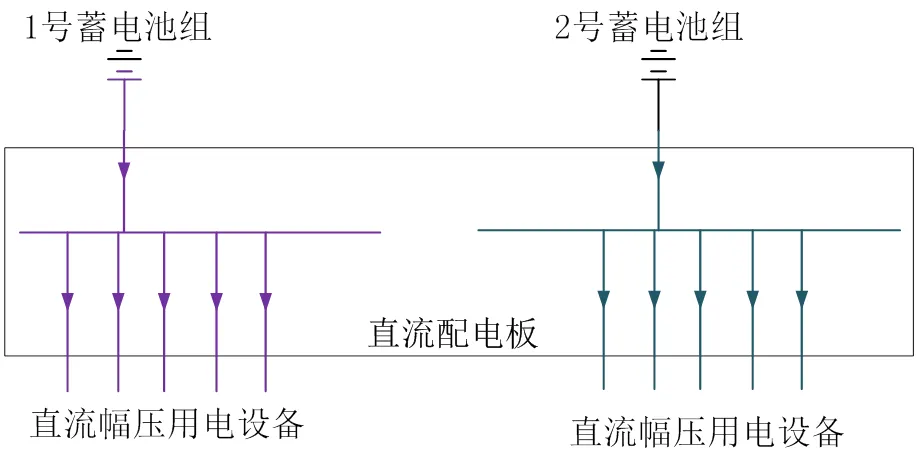
圖3 直流電網左右舷獨立供電拓撲結構
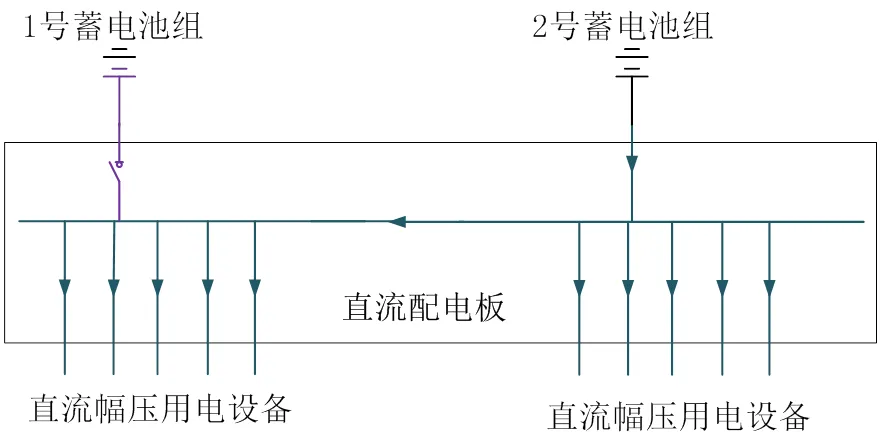
圖4 故障模式下單蓄電池組供電拓撲結構
直流配電板各個供電支路均設置了電流傳感器,能夠實時采集電流信號,當電流突變超過一定閾值后,能量管理裝置內部錄波模塊進行越線報警,并以40 kHz的采樣頻率采集電流和電壓信息進行存儲,作為故障分析的依據。目前有效的故障支路切除是依據斷路器自身的保護特性,蓄電池供電開關、供電支路開關和直流配電箱內開關設置分級保護,通過時間和電流實現分級切除。當電流超出短路整定值后,對應支路斷路器分斷,切除最小故障支路,實現故障隔離,恢復未故障區的正常供電。
3.2 交流電網
交流電網故障主要分為電源故障和供電支路故障,電源故障是指逆變電源發生過壓、絕緣低、過熱、短路等,電源故障主要由逆變電源對設備狀態判斷并上傳給能量管理裝置。供電支路是指交流配電板供電支路或交流配電箱內供電支路過載、短路等故障,通過分級保護,及時切除故障。
逆變電源從直流幅壓電網取電,是交流電網的動力來源,交流電網正常工作時,1號逆變電源和2號逆變電源分別給左、右舷交流電網供電,供電拓撲結構詳見圖3所示。當逆變電源監測到輸入欠壓、絕緣值較低、過熱、輸出欠壓、過壓等故障時,逆變電源會自動停機保護,保證設備自身的安全,同時給能量管理裝置上傳故障信息。此時一舷交流電網斷電,能量管理裝置判斷另一臺逆變電源工作狀態,如果另一臺逆變電源無過載,運行正常,能量管理裝置會下發交流配電板內故障電源供電開關分斷指令,同時閉合交流配電板內母聯開關,實現單臺逆變電源給左右舷交流電網供電,供電拓撲結構如圖6所示。

圖5 交流電網左右舷獨立供電拓撲結構
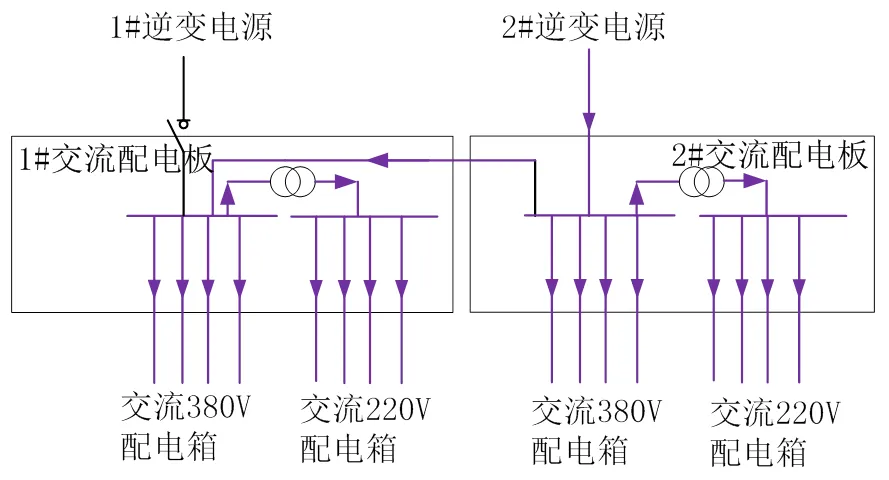
圖6 故障模式下逆變電源供電拓撲結構
交流配電板各個供電支路均設置了電流傳感器,能夠實時采集到電流信號,當供電支路出現電流突變時,能量管理裝置內部錄波模塊進行越線報警,并以40 kHz的采樣頻率采集電流和電壓信息進行存儲,作為故障分析的依據。目前有效的故障支路切除是依據斷路器自身的保護特性,逆變電源供電開關、供電支路開關和交流配電箱內開關設置分級保護,通過時間和電流實現分級切除。當電流超出短路整定值后,對應支路斷路器分斷,切除最小故障支路,實現故障隔離,恢復未故障區的正常供電。
3.3 直流24 V電網
直流24 V電網故障主要分為電源故障和供電支路故障,電源故障是指直流24 V UPS出現輸入過壓、過溫、輸出短路等故障,直流24 V UPS內部監控模塊對各個模塊的故障狀態進行監測并上傳給能量管理裝置。供電支路故障是指直流24 V配電支路出現過載或短路故障,當電流過大時,切除供電支路,實現故障隔離,同時恢復未故障區的正常供電。
正常工況下,直流24 V UPS從直流幅壓電網取電,給直流24 V電網供電,供電拓撲圖詳見圖7,當直流24 V UPS出現欠壓故障時,24 V UPS從自帶備用電池取電,給直流24 V電網供電,保證重要用戶不斷電;當直流24 VUPS出現過溫、過壓等故障,直流24 V UPS會停機保護,保證電源設備自身的安全,同時將故障信息上傳給另一臺直流24 V UPS和能量管理裝置,正常工作的直流24 V UPS通過閉合母聯開關,實現失電側直流24 V電網斷電恢復,由于直流24 V配電箱內采用的是電力電子開關,斷電后支路分斷,能量管理裝置監測到母聯開關閉合,會下發斷電恢復的直流24 V配電箱支路閉合指令,恢復供電,實現直流24 V電網故障重構,供電拓撲結構詳見圖8。
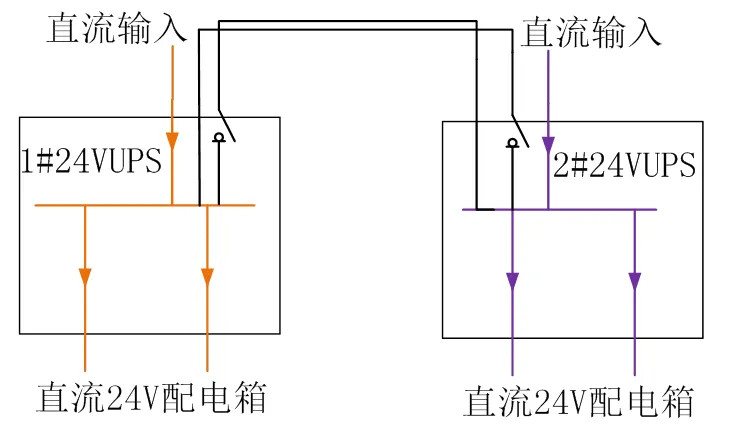
圖7 直流24 V UPS左右舷獨立供電拓撲結構
直流24 V配電箱內部配置了單獨的采集電路,當電流超出過載或短路電流時,直流24 V配電箱快速分斷支路,實現故障電路的切除,其它未故障支路電壓在短暫的拉低后恢復正常,有效實現了故障的隔離。
直流幅壓電網、交流電網和直流24 V電網故障可通過斷路器分級保護切斷故障支路,恢復非故障區供電,如果電源發生故障,則需要通過供電拓撲結構的變化,來實現供電重構。
4 小結
本文介紹的故障診斷及處理技術,能夠實現無人艦船上的電力系統狀態實時監測,通過分級保護原則,及時將故障區域進行隔離,有效保證電力系統的正常運行。能量管理裝置作為電力系統的監控中心,在電力系統自主運行過程中,當電源發生故障停機,引發一舷電網失電時,能夠迅速進行故障重構,快速恢復未故障區域的供電,滿足電力系統自主運行的需求。電力系統的架構及故障診斷及處理策略,能夠有效保證電力系統的自主運行,同時對故障信息進行存儲,能夠快速定位故障,適用于各類無人艦船,滿足自主化、智能化的新需求。

圖8 故障模式下直流24 VUPS供電拓撲結構
[1] 蘇紹娟, 韓靜, 王天霖等. 船舶無人化對船舶設計的影響[J]. 船舶工程, 2018(s1): 346-351.
[2] 莊勁武, 張曉鋒, 楊鋒, 等. 船舶直流電網短路限流裝置的設計與分析[J]. 中國電機工程學報, 2005, 25(20): 26-30.
[3] 傅薈璇. 大型船舶電力系統網絡拓撲重構技術研究[J]. 全國優秀碩士論文, 2007.
Research on Diagnosis and Processing of Ship Power System Faults
Gui Yongsheng1, Zhang Zhiyuan2, Du Luona2
(1. Second Military Delegates’ Office in Wuhan, Wuhan 430064, China; 2. China Ship Development and Design Center,Wuhan 430064, China)
U665.1
A
1003-4862(2021)10-0001-05
2021-06-28
桂永勝(1970-),男,高級工程師。研究方向:船舶操縱控制,船舶電氣。E-mail: 13707115537@139.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
船舶(2021年4期)2021-09-07 17:32:22
海峽姐妹(2020年8期)2020-08-25 09:30:18
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39