無人機(jī)攝影測量技術(shù)在危巖勘查中的應(yīng)用
2021-10-29 04:09:46黃之巍
廣西水利水電 2021年5期
關(guān)鍵詞:測量
羅 崴,黃之巍
(廣西壯族自治區(qū)地質(zhì)調(diào)查院,南寧 530023)
[關(guān)鍵字] 無人機(jī)攝影測量技術(shù);危巖;三維模型;應(yīng)用
0 引言
無人機(jī)技術(shù)最早出現(xiàn)并應(yīng)用于軍事領(lǐng)域,但近年來隨著計算機(jī)技術(shù)、通信技術(shù)、控制技術(shù)、3S技術(shù)等各種技術(shù)迅速發(fā)展,無人機(jī)技術(shù)也取得了巨大的進(jìn)步,使其應(yīng)用范圍從單一軍事方面逐漸進(jìn)入到民用和商用領(lǐng)域[1]。近年來,我國無人機(jī)測繪技術(shù)開始得到廣泛應(yīng)用,尤其是在國土監(jiān)察、農(nóng)業(yè)與林業(yè)監(jiān)控[2]、生態(tài)環(huán)境保護(hù)以及地理測繪等方面起到越來越大的作用[3]。無人機(jī)技術(shù)在地質(zhì)勘查運(yùn)用方面也從理論研究進(jìn)入了實用化階段[4],同時在地質(zhì)災(zāi)害快速測繪、三維建模、排查評估[5]具有明顯優(yōu)越性。通過無人機(jī)攝影測量技術(shù),構(gòu)建危巖三維實景模型[6],從而準(zhǔn)確獲取危巖體參數(shù)數(shù)據(jù),由此,無人機(jī)攝影測量技術(shù)將以其極大優(yōu)越性、極強(qiáng)適應(yīng)能力,在危巖勘查應(yīng)用中發(fā)揮巨大作用。
1 無人機(jī)攝影測量技術(shù)方法
在地質(zhì)災(zāi)害防治工作中,以無人機(jī)對危巖進(jìn)行勘查最為常見。2018年,為進(jìn)一步完善地質(zhì)災(zāi)害信息系統(tǒng)和群測群防網(wǎng)絡(luò)體系,全面提升防災(zāi)減災(zāi)救災(zāi)能力,廣西全面啟動縣(市、區(qū))范圍地質(zhì)災(zāi)害詳查工作。羅城縣積極響應(yīng),成為第一批開展地質(zhì)災(zāi)害詳查的縣市之一。
羅城縣位于廣西北部,地勢總體北西高南東低,北面為中山峽谷、低山丘陵地貌,南面以巖溶喀斯特地貌為主,大面積分布著巖溶谷地、丘陵、峰林谷地和峰叢洼地,巖溶區(qū)面積1627 km2,約占全縣面積61%。羅城縣境內(nèi)地層巖性分布較復(fù)雜,整體上北西部主要是碎屑巖、變質(zhì)巖、巖漿巖分布區(qū),南東部主要為碳酸鹽巖分布區(qū)。地質(zhì)構(gòu)造發(fā)育較強(qiáng)烈,主要受北北東—南南西向構(gòu)造控制與影響。本次羅城縣地質(zhì)災(zāi)害詳查共調(diào)查到地質(zhì)災(zāi)害點228 處,其中危巖99 處、巖崩27 處,兩者占到災(zāi)害總數(shù)55%。危巖為羅城縣最為常見的地質(zhì)災(zāi)害類型,主要分布于南面巖溶地貌區(qū),規(guī)律明顯,突發(fā)性強(qiáng),致災(zāi)嚴(yán)重。危巖災(zāi)害在羅城縣地質(zhì)災(zāi)害中日益突出,運(yùn)用無人機(jī)新技術(shù)對其進(jìn)行詳細(xì)勘查意義重大。本文以羅城縣地質(zhì)災(zāi)害詳查項目為依托,以無人機(jī)對羅城縣四把鎮(zhèn)白石下危巖點進(jìn)行勘查為例,介紹了無人機(jī)攝影測量技術(shù)在危巖勘查中具體應(yīng)用,為類似條件地區(qū)危巖勘查提供參考。
1.1 無人機(jī)參數(shù)
本次選用某四旋翼測繪級無人機(jī)作為航拍無人機(jī),結(jié)合千尋基站定位信息,航測定位精度優(yōu)于1 cm。無人機(jī)內(nèi)置厘米級導(dǎo)航和定位系統(tǒng),具有支持RTK 和PPK 高性能成像系統(tǒng),精度達(dá)厘米級,外業(yè)操作簡便,內(nèi)業(yè)成圖快捷,對于時間緊迫、任務(wù)繁重的測量任務(wù),可有效地提高工作效率。羅城縣危巖災(zāi)害突出,數(shù)量多,范圍廣,地形復(fù)雜,高差大,測量任務(wù)重,時間緊,精度要求高,綜合考慮項目成本等因素,無人機(jī)最適合運(yùn)用到本次危巖勘查工作中,其參數(shù)見表1。
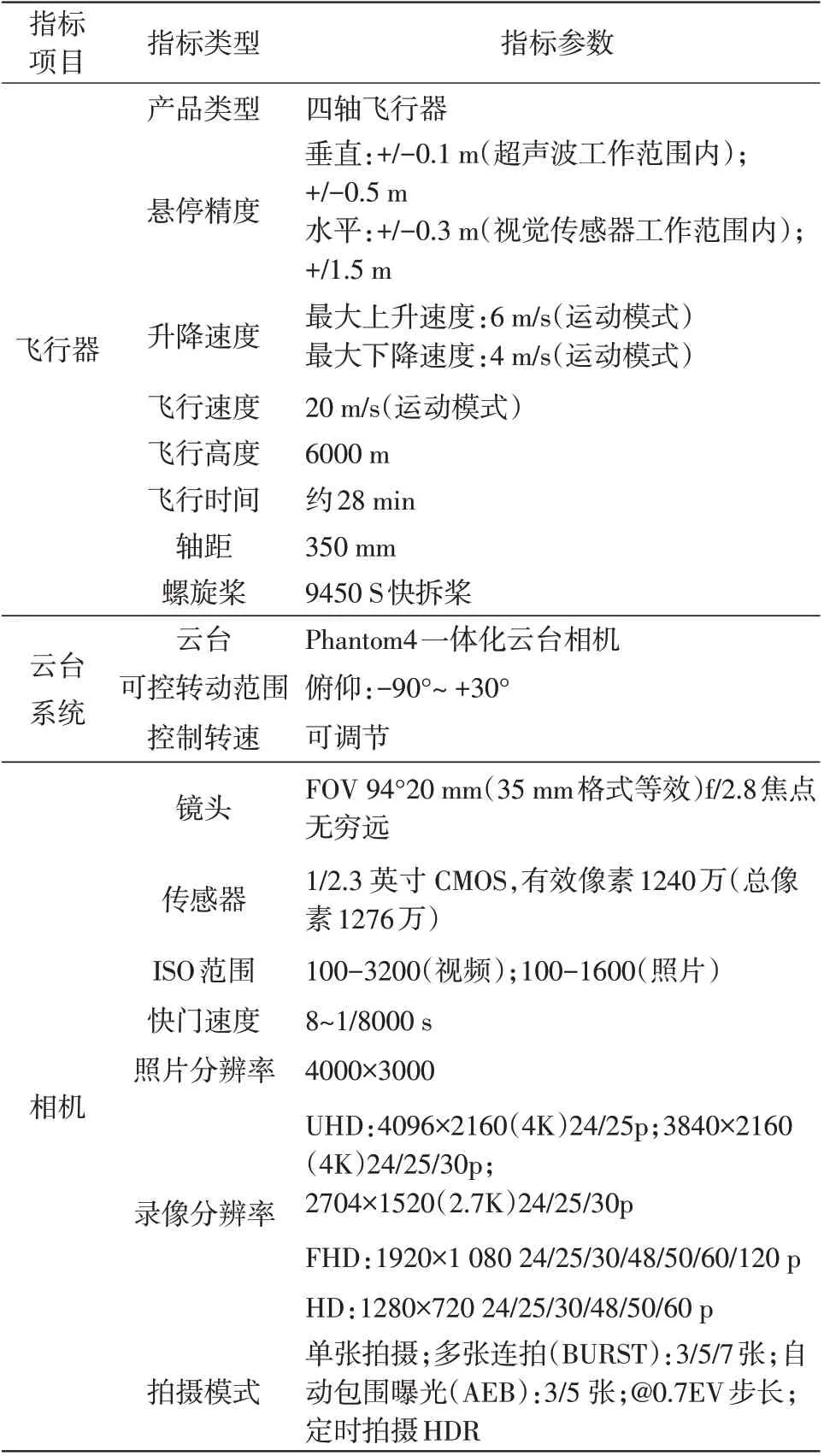
表1 無人機(jī)參數(shù)
1.2 工作流程
1.2.1 周圍環(huán)境確定
結(jié)合收集到的白石下危巖點的地質(zhì)資料,開展實地踏勘,觀察危巖體及周圍植被覆蓋情況,確定是否符合航測作業(yè)。白石下危巖點位于羅城縣四把鎮(zhèn)白石下屯東北部的山體上,山體的正下方是一個采礦區(qū),采礦造成了上方的山體塌陷,塌陷處上方的山體整體劃分為危巖體,塌陷的山體形成3 條明顯的斷裂(見圖1 中①②③),山體存在崩塌和塌陷的安全隱患。山體東南方向較松散的部位已經(jīng)有一定規(guī)模的崩塌,對東邊新遼屯和西邊的白石下屯造成較大威脅。經(jīng)前期踏勘,危巖山體植被以雜草灌木為主,植被覆蓋適中,陡崖處基巖大面積裸露,適合使用無人機(jī)對危巖進(jìn)行航測。
1.2.2 航線規(guī)劃及像控點布置
根據(jù)危巖與周圍環(huán)境情況,白石下危巖山體面積約10 000 m2,測量面積較小,山頂標(biāo)高最高約700 m,相對地面高差300 m,因此,根據(jù)大疆自帶的飛行APP,本次飛行相對高度設(shè)置為330 m,選擇RTK坐標(biāo)系,設(shè)置照片比例尺1∶2500,點選3個邊界點生成測繪區(qū)域,自動規(guī)劃航線見圖1,航線為弓字型路線,共7條航帶,線路航向與山體延伸方向垂直,設(shè)置覆蓋度航向80%,旁向70%。為獲取精準(zhǔn)地面坐標(biāo),拍攝前需要進(jìn)行控制點的布設(shè),分別于白石下、新遼及兩者之間共布設(shè)3個控制點(見圖1中K1、K2、K3),并采用RTK進(jìn)行控制點坐標(biāo)的精確測量。
1.2.3 航拍作業(yè)
由于危巖山體面積較小,危巖與周圍環(huán)境高差大,本次采用四旋翼智能無人機(jī)根據(jù)航線進(jìn)行危巖數(shù)據(jù)采集。無人機(jī)根據(jù)規(guī)劃好的航線進(jìn)行低空攝影,對危巖進(jìn)行多角度高覆蓋的拍攝。為更豐富地捕捉危巖細(xì)節(jié)信息,除按規(guī)劃航線采集數(shù)據(jù)外,根據(jù)危巖形態(tài)和構(gòu)造特征,還對危巖上的斷裂、巖崩、塌陷、陡崖危巖等地方進(jìn)行手動的加密航拍(見圖1)。

圖1 白石下危巖點位置及航線規(guī)劃圖
1.2.4 數(shù)據(jù)處理
航拍數(shù)據(jù)處理主要步驟包括照片質(zhì)量審核、數(shù)據(jù)預(yù)處理、幾何校正、區(qū)域網(wǎng)聯(lián)合平差、真正射糾正、三維建模、三維數(shù)據(jù)生成及多格式輸出等。驗證合格的數(shù)據(jù)通過無人機(jī)處理軟件及點云處理軟件,完成傾斜影像自動空中三角測量、傾斜影像密集匹配和傾斜影像的拼接等。數(shù)據(jù)處理后可得到正射影像、DSM和真實三維模型。處理好的危巖三維再通過點云軟件和平面制圖軟件的處理,可對危巖結(jié)構(gòu)面、體積等進(jìn)行量測,獲得危巖所需的測量數(shù)據(jù),包括危巖體邊界、結(jié)構(gòu)面產(chǎn)狀、地形圖、剖面圖、危巖體尺寸及體積等。具體流程見圖2。
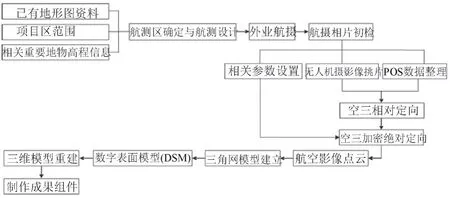
圖2 無人機(jī)攝影及數(shù)據(jù)處理流程
2 測量結(jié)果
2.1 危巖點正射影像圖
根據(jù)無人機(jī)航測數(shù)據(jù)處理成果,以危巖體及威脅對象為主體,生成反映危巖周邊環(huán)境和受威脅對象的位置且比例尺為1∶2500的垂直正射影像圖(見圖3),能夠完整體現(xiàn)危巖與受威脅對象的關(guān)系,其中危巖點與東南部的新遼屯距離最近。為了反映危巖點的臨空狀態(tài)及與母巖的分離狀態(tài),根據(jù)無人機(jī)對危巖點斷裂拍攝測量得到兩張斷裂正射影像圖(圖3)。

圖3 白石下危巖點正射影像圖
2.2 危巖點的DSM
根據(jù)無人機(jī)航測數(shù)據(jù)處理成果,生成白石下危巖點及其周邊的DSM(見圖4),通過DSM 的數(shù)值可以直觀得到,危巖點所處位置高程大概在550~700 m,東南部的新遼屯所處的地勢位于400~450 m。可以看出從山頂?shù)缴襟w東南的新遼屯高差變化大,危巖點對村莊構(gòu)成巨大威脅。根據(jù)DSM 提取相應(yīng)的等高線數(shù)據(jù),生成等高線差為5 m 等高線圖(見圖4)。根據(jù)等高線分布的疏密情況可知,危巖點的坡度較陡,高差變化大,陡坡是誘發(fā)危巖地質(zhì)災(zāi)害的因素之一。
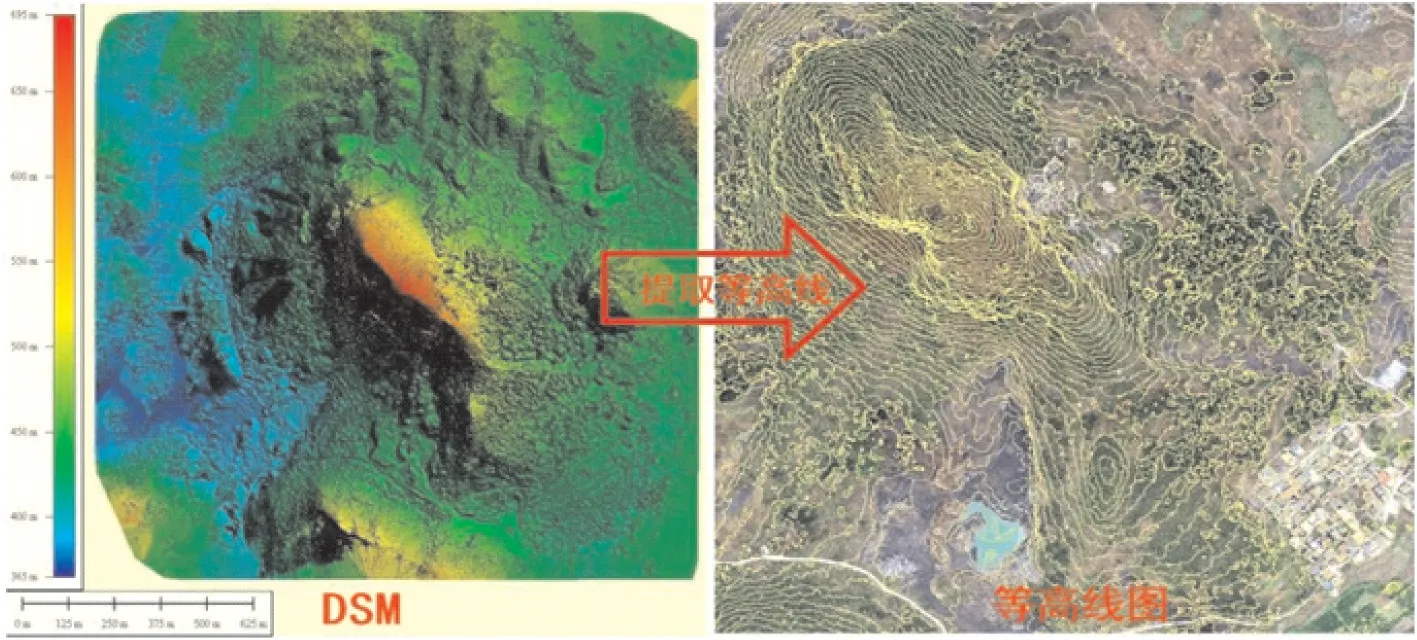
圖4 白石下危巖點DSM提取等高線圖
2.3 危巖點的三維模型
三維模型圖可用相關(guān)的三維視圖軟件打開(見圖5。白石下屯獲取的航測數(shù)據(jù)比較完整,是在相對高差330 m 處獲取的航拍影像,生成的三維模型質(zhì)量較高,無明顯的空洞,從三維模型中可以直觀地看出危巖點與威脅對象的空間位置關(guān)系,整體的三維模型長度為1500 m,寬度為1460 m。
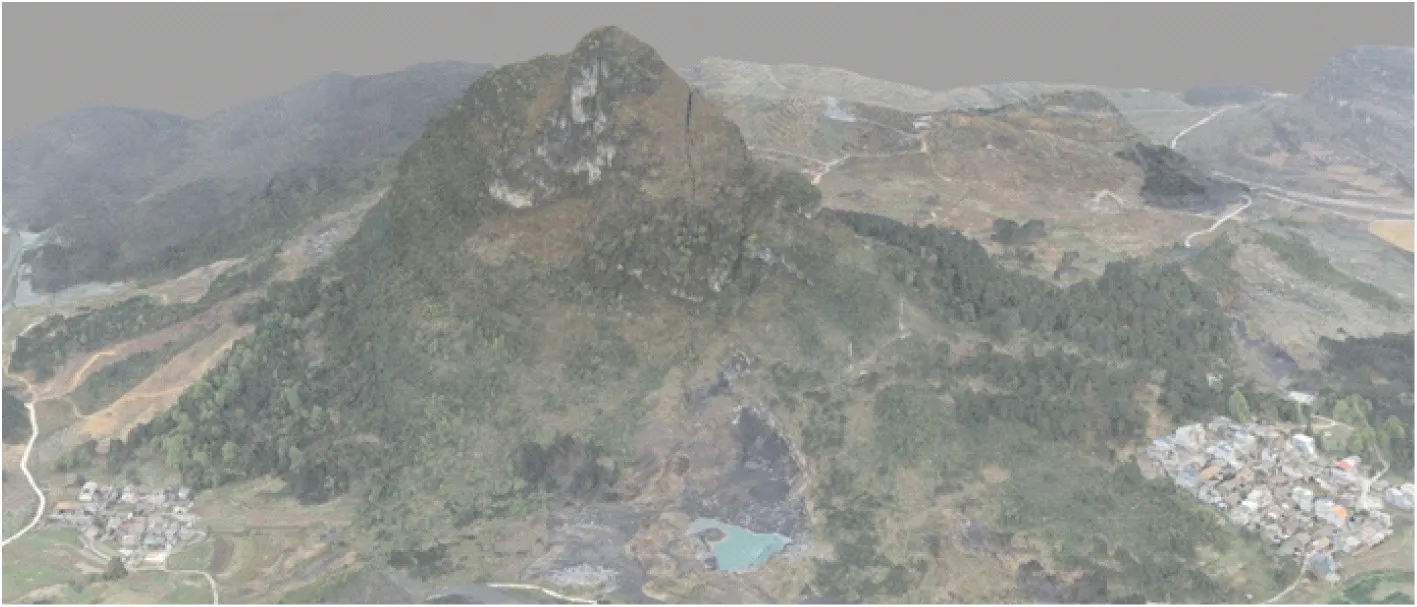
圖5 白石下危巖點三維模型圖
2.4 危巖點初始崩滑方向剖面圖
運(yùn)用相關(guān)的軟件制作危巖體崩滑方向的剖面圖(見圖6),從剖面圖體現(xiàn)危巖與威脅對象的空間關(guān)系,反映危巖與受威脅對象的相對高度、水平距離及地形坡度變化。從剖面圖上獲取危巖點與最近村莊的水平距離約200 m,最大高差是110 m,危巖體所在的山體坡度約為30°。從這些參數(shù)可知,危巖體如果發(fā)生滑坡崩塌,極易威脅到下方的村莊,而且具有比較大的破壞力。
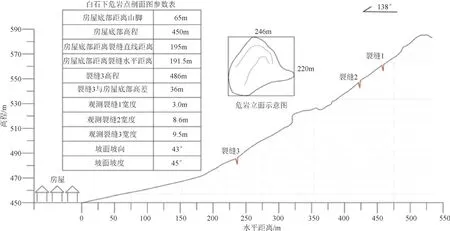
圖6 白石下危巖點初始崩滑方向剖面圖
2.5 危巖點周邊可見的結(jié)構(gòu)面產(chǎn)狀
根據(jù)航拍影像形成的點云數(shù)據(jù),運(yùn)用點云處理軟件對危巖點的坡面、巖層、主要的斷裂等產(chǎn)狀進(jìn)行測量,結(jié)果如下:
(1)邊坡:危巖邊坡坡向為43°、坡度45°。由于此處是塌陷斷面,邊坡測量的數(shù)據(jù)為危巖點初始滑動方向的坡向和坡度。
(2)巖層產(chǎn)狀:由點云處理軟件測得巖層面產(chǎn)狀為105°∠18°。
(3)斷裂:兩組大的斷裂,斷裂1,產(chǎn)狀為93°∠69°,延伸120~130 m,張開度1.5~10 m,形成明顯的斷裂面;斷裂2,產(chǎn)狀為36°∠72°,延伸200~250 m,張開度4~7.5 m。
2.6 白石下危巖點結(jié)構(gòu)面赤平投影分析
根據(jù)結(jié)構(gòu)面產(chǎn)狀測量的結(jié)果,通過平面制圖軟件制作出相應(yīng)的赤平投影圖(見圖7)。由圖7可知,斷裂1 與斷裂2 相交點在邊坡的對側(cè),對巖體的不穩(wěn)定性貢獻(xiàn)較小,單塊結(jié)構(gòu)體是比較穩(wěn)定的結(jié)構(gòu)體。但是此處由于地面下沉,整個山頭處于下沉的狀態(tài),為不穩(wěn)定的邊坡。幾組斷裂形成的錐形體都屬于不穩(wěn)定的結(jié)構(gòu)體。隨著地面的下沉,山體可能還會出現(xiàn)更多的新的斷裂面和不穩(wěn)定結(jié)構(gòu)體。
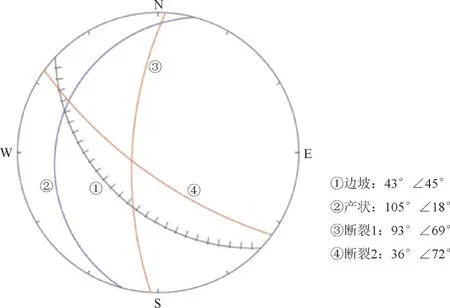
圖7 危巖結(jié)構(gòu)面赤平投影圖
2.7 白石下危巖點體積測量
體積通過截取三維模型上裂隙以及山腳輪廓來確定危巖體的邊界,采用軟件的體積測量工具來量取危巖體的體積。由于白石下危巖點是整個山體的塌陷,在測量時,將塌陷部分的山體一起測量。由此可量取危巖體的體積量為2 580 668 m3。
3 無人機(jī)對危巖勘查優(yōu)勢與局限性
無人機(jī)攝影測量技術(shù)在危巖勘查中的應(yīng)用具有顯著優(yōu)勢:
(1)對已發(fā)現(xiàn)危巖勘查更精細(xì)化,測量數(shù)據(jù)更準(zhǔn)確,為后期防治提供有力依據(jù)。對于高陡危巖,以往勘查手段基本上是用高清相機(jī)拍攝,危巖產(chǎn)狀、尺寸等數(shù)據(jù)多為肉眼估算。而無人機(jī)可通過數(shù)據(jù)采集,建立三維模型,準(zhǔn)確得到危巖邊界、結(jié)構(gòu)面產(chǎn)狀、危巖體尺寸及體積等數(shù)據(jù),方便快捷。
(2)對潛在危巖排查更精準(zhǔn),提高災(zāi)害預(yù)防有效性。在以往對危巖調(diào)查時,因無法直接觀察到潛在的危巖體,而將山高坡陡,植被發(fā)育的點作為易發(fā)村屯點。而近幾年新發(fā)生的巖崩地質(zhì)災(zāi)害多出于這些易發(fā)村屯點。通過無人機(jī)技術(shù),對易發(fā)村屯進(jìn)行全面排查,找出潛在危巖點,獲取相關(guān)參數(shù),圈出危巖體威脅范圍,根據(jù)危巖特征參數(shù),落實具體防治對策,提高危巖災(zāi)害治理成效。
(3)有效減少外業(yè)工作量,提高安全保障。相比以往需攀爬靠近危巖體測量的方法,無人機(jī)技術(shù)外業(yè)操作簡單,獲取更多參數(shù)數(shù)據(jù),有效降低高陡邊坡或災(zāi)害頻發(fā)區(qū)相關(guān)調(diào)查人員發(fā)生傷亡的概率,極大改善危巖勘查工作條件,保障人員安全。
(4)靈活性強(qiáng),自動化程度高,可視化監(jiān)測,安全可靠。采用四旋翼智能無人機(jī)進(jìn)行危巖勘查,起降方便,無需機(jī)場或發(fā)射裝置,靈活機(jī)動。采用飛控系統(tǒng)可按航線自動飛行,電量不足時自動返航。在航空攝影過程中可實時畫面監(jiān)控,深度可視化。
同時,受科技水平、軟件能力和經(jīng)濟(jì)條件等因素影響,本次無人機(jī)攝影測量技術(shù)在危巖勘查中應(yīng)用也存在一些技術(shù)難題:①外業(yè)數(shù)據(jù)采集過程中,危巖點周邊山體高度都比較大,高程差較大,以周邊最高的山為基準(zhǔn)點設(shè)計航線后,會造成正射及三維成果中危巖點偏小,效果較差;②危巖點山體高差比較大,危巖體周圍植被比較多,在三維建模數(shù)據(jù)處理過程中影像的拼接出現(xiàn)拉花現(xiàn)象,危巖體有時也會變形,造成大三維的山頂出現(xiàn)數(shù)據(jù)缺失,整體質(zhì)量下降;③由于植被過于茂盛,造成有些照片無法通過空中三角計算,對正射和三維的完整性造成一定的影響;④由于無人機(jī)無法自動避障電線、樹枝等細(xì)小物體,無法靠近拍攝,危巖點的裂隙、分離面、懸空面等微細(xì)節(jié)拍的不夠細(xì);⑤無人機(jī)續(xù)航時間普遍較短,難以滿足較大范圍危巖勘查,軟件運(yùn)行對計算機(jī)配置要求較高。
可以看出,危巖山體高程差太大,植被過多,對無人機(jī)測量結(jié)果造成較大的影響,其中植被影響更甚。因此,在今后無人機(jī)對危巖勘查應(yīng)用中,對于山體高程差過大的危巖點,可綜合考慮選擇適合的測量技術(shù)方法,提高危巖體測量數(shù)據(jù)采集的準(zhǔn)確性。對于一些植被覆蓋或其他附屬雜物較多的地方,無法保證其測量精度時,還需進(jìn)行人工補(bǔ)測;也可以選擇帶有雷達(dá)測量功能的無人機(jī)進(jìn)行航測,從而盡可能降低植被對測量結(jié)果的影響。隨著科學(xué)技術(shù)不斷進(jìn)步,通過研發(fā)改進(jìn),優(yōu)化升級,多技術(shù)融合發(fā)展,規(guī)范管理,無人機(jī)技術(shù)在危巖勘查中的應(yīng)用將取得更顯著成效,體現(xiàn)出更大的應(yīng)用價值。
4 結(jié)語
長期以來,危巖勘查一直是地質(zhì)災(zāi)害調(diào)查工作的難點。根據(jù)無人機(jī)攝影測量工作流程,對羅城縣白石下危巖點進(jìn)行具體應(yīng)用,通過無人機(jī)攝影測量技術(shù),可精準(zhǔn)采集危巖體參數(shù)數(shù)據(jù),生成危巖點正射影像圖、DSM、三維模型等,從而準(zhǔn)確地獲取危巖體的尺寸、形狀、巖層產(chǎn)狀、構(gòu)造特征、主滑方向以及體積等具體參數(shù),為危巖防治提供有力基礎(chǔ)數(shù)據(jù)。可以看出,無人機(jī)攝影測量技術(shù)能很好地解決高陡山體上的危巖地質(zhì)參數(shù)的采集問題,大幅度提升危巖勘查的測量效率和測量精度,有效減少人力、物力以及時間的投入,產(chǎn)生良好效益。今后應(yīng)用中,應(yīng)當(dāng)在保持無人機(jī)技術(shù)優(yōu)勢的基礎(chǔ)上,科技創(chuàng)新,突破難題,將無人機(jī)技術(shù)更廣泛地應(yīng)用于地質(zhì)災(zāi)害調(diào)查中,進(jìn)一步促進(jìn)地質(zhì)災(zāi)害勘查工作信息化、現(xiàn)代化發(fā)展。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
