基于Linux系統(tǒng)的智能停車(chē)場(chǎng)設(shè)計(jì)
2021-10-30 05:19:20周航陳開(kāi)輝甘睿科
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用 2021年10期
◆周航 陳開(kāi)輝 甘睿科
基于Linux系統(tǒng)的智能停車(chē)場(chǎng)設(shè)計(jì)
◆周航 陳開(kāi)輝 甘睿科
(廣西科技大學(xué) 電氣與信息工程學(xué)院 廣西 545616)
為了應(yīng)對(duì)城市交通急速發(fā)展與新能源車(chē)輛的推廣,設(shè)計(jì)了一種基于Linux操作系統(tǒng)的智能停車(chē)場(chǎng)系統(tǒng)。該系統(tǒng)通過(guò)圖像識(shí)別與智能管控系統(tǒng),實(shí)現(xiàn)對(duì)入場(chǎng)車(chē)輛的識(shí)別登記與車(chē)位安排。實(shí)現(xiàn)停車(chē)場(chǎng)無(wú)人管理情況下車(chē)輛的進(jìn)出入并引導(dǎo)車(chē)輛行至正確位置。實(shí)驗(yàn)測(cè)試結(jié)果表明系統(tǒng)運(yùn)作可行性高、效率提升明顯,滿足設(shè)計(jì)需求。
車(chē)輛識(shí)別;智能停車(chē)場(chǎng);智能引導(dǎo);無(wú)人值守
現(xiàn)如今城市化迅速發(fā)展,新能源汽車(chē)隨處可見(jiàn),車(chē)輛停泊充電問(wèn)題成為城市面臨的一個(gè)巨大挑戰(zhàn)[1]。在現(xiàn)有城市停車(chē)面積無(wú)法擴(kuò)增的情況下,提出無(wú)人值守,智能管理的停車(chē)場(chǎng)系統(tǒng)用以取代傳統(tǒng)人工管理模式以緩解城市停車(chē)壓力、交通壓力變得非常重要有意義。針對(duì)司機(jī)停、取車(chē)效率低下,設(shè)計(jì)無(wú)人自識(shí)別登記入庫(kù)系統(tǒng),有利于使司機(jī)停車(chē)更便捷,停車(chē)場(chǎng)盈利和效率提高。針對(duì)司機(jī)在泊車(chē)區(qū)域內(nèi)尋找車(chē)位浪費(fèi)大量時(shí)間,研究基于多定位傳感器智能引導(dǎo)算法引導(dǎo)車(chē)輛泊入空位,縮短了急需停放車(chē)輛的滯留時(shí)間[1]。在新能源汽車(chē)快速發(fā)展的今天,對(duì)新能源汽車(chē)提供了良好支持。
1 系統(tǒng)結(jié)構(gòu)與工作原理
1.1 系統(tǒng)組成
該停車(chē)場(chǎng)系統(tǒng)以 Linux 主控系統(tǒng)為一級(jí)控制系統(tǒng),針對(duì)車(chē)輛停泊多個(gè)流程設(shè)計(jì)車(chē)輛智能登記系統(tǒng),智能引導(dǎo)系統(tǒng),車(chē)位管理系統(tǒng)等多個(gè)二級(jí)子系統(tǒng),子系統(tǒng)間網(wǎng)關(guān)采用ZigBee協(xié)議并發(fā)送信息至主控系統(tǒng)。

圖1 系統(tǒng)組成圖
2 子系統(tǒng)運(yùn)行流程
2.1 基于Opencv建立車(chē)輛信息識(shí)別子系統(tǒng)
本系統(tǒng)采用基于Opencv視覺(jué)識(shí)別庫(kù),移植至Linux平臺(tái),首先由CCD相機(jī)收集車(chē)牌圖像數(shù)據(jù),進(jìn)行預(yù)處理,定位識(shí)別區(qū)域,將圖像特征提取;然后將圖像做二值化處理與分析,獲得所需車(chē)輛信息。在現(xiàn)有技術(shù)下識(shí)別“92式”車(chē)牌號(hào)非常成熟,獲得車(chē)輛信息后由系統(tǒng)判斷選擇,推送相應(yīng)車(chē)位,并由車(chē)位引導(dǎo)子系統(tǒng)進(jìn)行下一步引導(dǎo)[3-4]。
2.2 車(chē)位引導(dǎo)子系統(tǒng)
本系統(tǒng)主要功能是迅速引導(dǎo)車(chē)主行駛至系統(tǒng)選定的車(chē)位。在引導(dǎo)前系統(tǒng)已通過(guò)圖像識(shí)別,獲得停車(chē)場(chǎng)車(chē)位信息。首先系統(tǒng)分配最優(yōu)車(chē)位,通過(guò)引導(dǎo)系統(tǒng)所設(shè)傳感器獲取車(chē)輛位置,然后通過(guò)最優(yōu)路徑算法得出最優(yōu)路徑,最后通過(guò)指示燈顯示屏引導(dǎo)車(chē)主泊入車(chē)位。
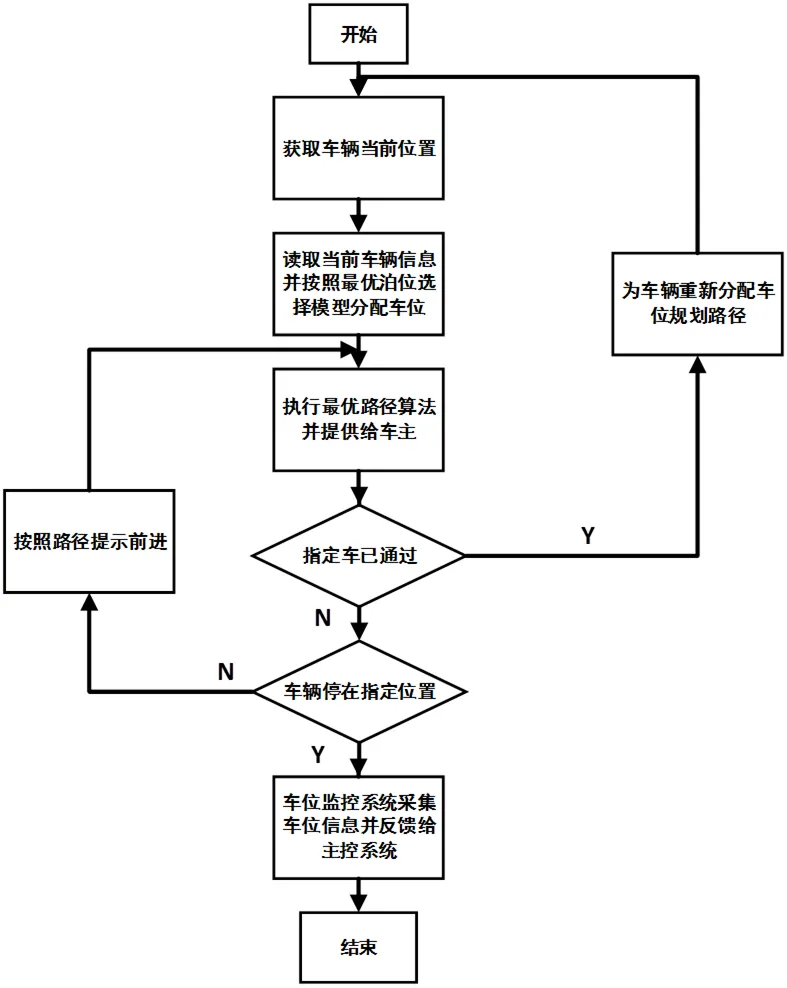
圖2 車(chē)位引導(dǎo)系統(tǒng)工作流程圖
3 系統(tǒng)車(chē)牌識(shí)別設(shè)計(jì)
本系統(tǒng)提出的識(shí)別和讀取車(chē)牌的方法包括四個(gè)部分:處理圖像和分離車(chē)牌,調(diào)整分離后的車(chē)牌至適當(dāng)大小后對(duì)其處理以進(jìn)行字符識(shí)別,從車(chē)牌中獲得單獨(dú)提取的字符,并最終在處理后的字符圖像上進(jìn)行識(shí)別以獲得車(chē)牌號(hào)[3]。
3.1 車(chē)牌粗定位
對(duì)于該步驟,處理圖像的第一步一般是將彩色圖像轉(zhuǎn)化為灰色圖像,稱(chēng)為灰度化處理,是一個(gè)降維處理過(guò)程[4]。步驟目的在于將其轉(zhuǎn)換為一個(gè)方便處理的二維數(shù)組。第二步利用雙邊濾波器去除圖片底噪使得圖像變得平滑。然后將該圖像處理為電腦可以讀取的格式,并發(fā)送給樹(shù)莓派進(jìn)行下一步處理。中國(guó)國(guó)內(nèi)車(chē)牌大部分以藍(lán)色背景白色字符為主以此為識(shí)別目標(biāo)提取特征。
3.2 圖像調(diào)整和預(yù)處理
處理圖像的第一步是將該圖片從RGB圖像裝換為灰度圖像。步驟目的在于將其轉(zhuǎn)換為一個(gè)更有用的二維數(shù)組。第二步利用雙邊濾波器去除圖片底噪使得圖像變得平滑。車(chē)牌圖像必須調(diào)整大小,以便車(chē)牌上的每個(gè)字符的大小可以根據(jù)相對(duì)于整個(gè)圖像的大小進(jìn)行調(diào)整。
如果圖像大小不同,字符大小也可能不同。整個(gè)車(chē)牌的長(zhǎng)寬比應(yīng)該得到保持,以便所需字符不會(huì)在尺寸調(diào)整時(shí)被扭曲。為此,需要為車(chē)牌設(shè)置一個(gè)目標(biāo)區(qū)域,使得拍攝所獲得字符彼此之間可以被區(qū)分開(kāi)來(lái)。在設(shè)置的圖像區(qū)域內(nèi)調(diào)整圖像的寬度和高度以匹配原始車(chē)牌圖像的長(zhǎng)寬比。同時(shí)縮小圖像大小可以進(jìn)一步減少識(shí)別處理字符所需要的時(shí)間。
車(chē)牌需要進(jìn)一步處理以區(qū)分車(chē)牌上的字符與其他的無(wú)關(guān)特征,比如像螺絲和污跡,國(guó)家要求的標(biāo)記等干擾物。首先使用高斯模糊處理調(diào)整過(guò)的圖片灰度版本,使圖像變得平滑,然后對(duì)車(chē)牌進(jìn)行分割處理,圖像分割是圖像處理和計(jì)算機(jī)視覺(jué)中應(yīng)用的基本技術(shù)手段[4]。國(guó)內(nèi)外廣泛使用的圖像分割方法主要包括閾值分割法、聚類(lèi)分割法、區(qū)域生長(zhǎng)法、深度學(xué)習(xí)法等[10],本系統(tǒng)采用最大類(lèi)間方差法。最后應(yīng)用侵蝕函數(shù)對(duì)所獲得的車(chē)牌圖像進(jìn)行閾值處理,得到更清晰的字符特征集。
3.3 字符定位
為了實(shí)現(xiàn)字符識(shí)別,最好將車(chē)牌上的字符分離為單獨(dú)的圖像。將前一節(jié)預(yù)處理得到的平板圖像作為輸入。將所獲得圖像利用取反函數(shù)進(jìn)行反轉(zhuǎn)。下一步是找到圖像中的所有輪廓,并在給定的尺寸范圍內(nèi)分離出與預(yù)期大小相對(duì)應(yīng)的輪廓[4-5]。為了進(jìn)一步清理車(chē)牌并只留下車(chē)牌上的所需字符,制作一個(gè)掩模圖像覆蓋除所需字符的其他不必要區(qū)域,最后得到只有字符特征的車(chē)牌圖像。
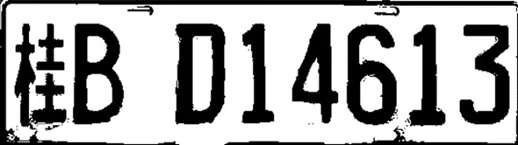
圖3 字符二值化處理圖
3.4 字符識(shí)別
這涉及將上一步獲得的字符圖像與數(shù)據(jù)庫(kù)中已經(jīng)存在的字符數(shù)據(jù)進(jìn)行比較,將字符圖像與一組相似的字符模板進(jìn)行匹配。每個(gè)模板都有一個(gè)獨(dú)立的字母與數(shù)字的組合,這些將組合構(gòu)成車(chē)牌號(hào)碼。
4 車(chē)輛數(shù)據(jù)庫(kù)
車(chē)牌識(shí)別所得到的車(chē)牌存儲(chǔ)在系統(tǒng)數(shù)據(jù)庫(kù)中,方便以后的提取調(diào)用。本系統(tǒng)使用SQLite來(lái)實(shí)現(xiàn)數(shù)據(jù)庫(kù)。SQLite是一個(gè)獨(dú)立的數(shù)據(jù)庫(kù),適合于小型獨(dú)立應(yīng)用程序。它也是跨平臺(tái)和ACID兼容的,也適用于大多數(shù)高級(jí)編程語(yǔ)言。同時(shí)車(chē)牌號(hào)碼可以手動(dòng)存儲(chǔ)在數(shù)據(jù)庫(kù)中,也可以在車(chē)牌識(shí)別過(guò)程中同步存儲(chǔ),并可以與數(shù)據(jù)庫(kù)現(xiàn)有數(shù)據(jù)比對(duì),以確定各個(gè)車(chē)牌的所有人。本系統(tǒng)這為現(xiàn)有的車(chē)牌識(shí)別提供了額外的設(shè)施,同時(shí)有助于擴(kuò)展系統(tǒng)包括付費(fèi)停車(chē)功能和盜竊檢測(cè)等功能。
5 控制進(jìn)程與界面
控制進(jìn)程運(yùn)行在樹(shù)莓派控制器上,控制整個(gè)系統(tǒng)的運(yùn)行。GUI程序可以在連接到同一網(wǎng)絡(luò)的任何計(jì)算機(jī),并在其上打開(kāi)。控制器程序偵聽(tīng)來(lái)自GUI的TCP端口的請(qǐng)求[6]。它還控制系統(tǒng)正常運(yùn)行時(shí)的完整功能。控制器對(duì)距離傳感器進(jìn)行輪詢,以確定是否有車(chē)輛停在車(chē)道上。如果有車(chē)輛存在,則使用攝像頭模塊單擊圖像,然后運(yùn)行圖像處理模塊。圖像處理的結(jié)果是車(chē)牌號(hào)碼,并與數(shù)據(jù)庫(kù)核對(duì),并打開(kāi)閘機(jī)護(hù)欄。在緊急情況下,管理員可以繞過(guò)整個(gè)系統(tǒng),為救護(hù)車(chē)、消防車(chē)等車(chē)輛放行。
6 實(shí)現(xiàn)和結(jié)果
該系統(tǒng)使用樹(shù)莓派3、一個(gè)攝像頭來(lái)捕捉車(chē)輛圖像,以及一個(gè)超聲波傳感器來(lái)檢測(cè)車(chē)輛并觸發(fā)車(chē)牌識(shí)別過(guò)程。車(chē)牌識(shí)別過(guò)程使用OpenCV庫(kù)處理和提取車(chē)牌圖像中的字符數(shù)據(jù),實(shí)現(xiàn)軟件完全使用Python 2.7編碼。系統(tǒng)管理員的獨(dú)立GUI是使用Jython實(shí)現(xiàn)的[6]。后臺(tái)數(shù)據(jù)庫(kù)使用維護(hù)在樹(shù)莓派上的SQLite3數(shù)據(jù)庫(kù)來(lái)存儲(chǔ)用戶數(shù)據(jù)和車(chē)輛日志。一個(gè)LCD顯示屏用于車(chē)輛進(jìn)入過(guò)程中的用戶交互。電機(jī)用于模擬閘機(jī)護(hù)欄,并在一定程度上達(dá)到了設(shè)計(jì)要求。
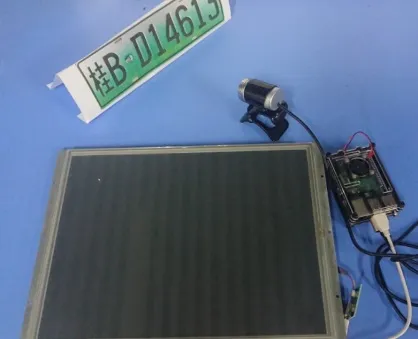
圖4 實(shí)物測(cè)試連接圖
7 結(jié)論
該系統(tǒng)提出用一個(gè)自動(dòng)系統(tǒng)取代目前的人工車(chē)輛管理,該系統(tǒng)可以實(shí)時(shí)監(jiān)錄、引導(dǎo)進(jìn)入場(chǎng)所的車(chē)輛,以達(dá)到減少勞動(dòng)力成本、延誤和給用戶帶來(lái)的不便并提出新能源汽車(chē)充電、停放困難的解決方法。該原型模型成功地實(shí)現(xiàn)了系統(tǒng)的設(shè)計(jì),能夠以最小的運(yùn)營(yíng)成本提供可靠的服務(wù)。此外,還可以根據(jù)現(xiàn)實(shí)情況實(shí)現(xiàn)增加防盜檢測(cè)和付費(fèi)停車(chē)等附加功能與改進(jìn)的算法和圖像處理技術(shù)提高服務(wù)質(zhì)量。
[1]程潔羚,歐麗君,薛君志.淺析國(guó)內(nèi)城市停車(chē)現(xiàn)狀及信息化解決措施[J].信息通信,2018(2):114-115.
[2]錢(qián)承山,蔣奇峰,茅韻怡,等.基于物聯(lián)網(wǎng)技術(shù)的智能停車(chē)場(chǎng)系統(tǒng)的設(shè)計(jì)[J].物聯(lián)網(wǎng)技術(shù),2016,6(7):26-27,31.
[3]李亞榮.基于Linux的停車(chē)場(chǎng)管理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].內(nèi)蒙古大學(xué),2018.
[4]黃勇軍,溫錦鋒,關(guān)芳芳,等.92式機(jī)動(dòng)車(chē)號(hào)牌檢驗(yàn)鑒定方法的研究[J].廣東公安科技,2012(4):16-18.
[5]張廣才,萬(wàn)守鵬,何繼榮. 數(shù)字圖像處理技術(shù)與MATLAB應(yīng)用[J]. 軟件,2019,40(11):139-142.
[6]陳敬靜. SQLite數(shù)據(jù)庫(kù)研究與可視化[D].南京郵電大學(xué),2020.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
財(cái)經(jīng)(2017年2期)2017-03-10 14:35:35
財(cái)經(jīng)(2016年15期)2016-06-03 07:38:02
 網(wǎng)絡(luò)安全技術(shù)與應(yīng)用2021年10期
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用2021年10期
- 網(wǎng)絡(luò)安全技術(shù)與應(yīng)用的其它文章
- 基于SPSS Modeler的涉警網(wǎng)絡(luò)輿情預(yù)警研究
- 基于深度學(xué)習(xí)的相聲推薦系統(tǒng)
- 異構(gòu)無(wú)線網(wǎng)絡(luò)環(huán)境下大規(guī)模入侵動(dòng)態(tài)取證仿真
- 基于風(fēng)險(xiǎn)點(diǎn)知識(shí)庫(kù)的銀行業(yè)務(wù)安全測(cè)試方法研究
- 基于自然語(yǔ)言處理的職務(wù)犯罪文書(shū)數(shù)據(jù)庫(kù)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 基于擬合決策邊界表達(dá)式的對(duì)抗攻擊方法