集成成像3D拍攝與顯示方法探析
2021-11-02 06:42:56李瑞鶴
無線互聯科技 2021年18期
李瑞鶴
(西安電子科技大學,陜西 西安 710000)
0 引言
1908年,G·Lippmann首次提出集成成像技術,自此,該技術因全視差、連續視點、無視疲勞等多重優勢而廣受關注。集成成像又被稱為“真3D顯示”,其借助微透鏡陣列記錄3D場景,并借助同參數微透鏡陣列將圖像重現,因而重現的圖像與原場景色彩一致、深度相同。常規集成成像仍存在分辨率低、視場角窄、深度范圍不佳等問題,這些缺陷成為限制該技術產業化、規模化的主要阻礙。因此,有必要深度研究集成成像3D拍攝與顯示方法,探索持續優化集成成像的顯示方案,以促進其在各領域的深度應用。
1 集成成像3D拍攝技術
為了適應不同應用場合,3D拍攝方法也有所差別,或利用單相機記錄物體平面圖像,再利用光、聲等飛行時間獲取物體深度信息;或利用雙目視差原理,以立體攝像系統進行拍攝,獲取具有視差的雙眼視圖,如同感IMAX系統實現3D電影的拍攝;或利用光波振幅、相位信息的記錄獲取3D圖像數據,以實現全息現實;或利用微透鏡陣列拍攝空間物體,直接獲取3D圖像,此即集成成像3D拍攝技術。集成成像3D拍攝方法很多,下文重點就較為典型的兩種方法進行闡述。
1.1 直接3D拍攝
1997年,日本F·Okano等首次以直接拍攝獲得了實時集成成像3D圖像,3D場景所發射的光纖利用微透鏡陣列的各透鏡元進行折射,再利用攝像機直接攝制下來,形成微圖像陣列,各圖像元經中心旋轉180°后被送至集成成像顯示器,經二維顯示器與針孔陣列解決深度反轉問題。值得注意的是,該方法所重構的三維圖像為虛像,其凹進顯示屏中,因而顯示效果不甚理想。隨后,M·Martinez-Corral等學者在微透鏡陣列、攝像機之間設置了一個成像物鏡,如此一來,物鏡所帶來的深度反轉與集成成像本身的深度反轉相結合,最終得到了深度正確的3D圖像,有效簡化了傳統拍攝方法深度反轉的繁冗步驟,同時獲取了實虛兩種3D圖像。為了進一步優化直接3D拍攝法相機鏡頭所引發的圖像畸變問題,J·Arai等學者將漸變折射率微透鏡陣列與圖像傳感器相貼近,然而,該過程需要附加漸變折射率微透鏡陣列等器件,既繁瑣又難免引入圖像畸變問題。因此,J·Kim等引入了計算機處理系統,通過對中心深度平面位置進行控制,有效提升了3D圖像的質量[1]。
1.2 攝像機陣列3D拍攝
該法是以攝像機來取代組成微透鏡陣列的各透鏡元,由此構成一個等間距排列的攝像機陣列,由于透鏡元、攝像機成像均存在上下、左右翻轉性,因此,利用攝像機陣列所獲得的微圖像陣列相當于傳統微透鏡陣列圖像元180°旋轉后的結果,因而解決了傳統拍攝方法深度反轉的問題,加上各攝像機僅需獲取一個圖像元,因而極大地提升了圖像分辨率。然而,該方法也有缺陷,即所需攝像機量大,加上攝像機間的配置、修正等復雜操作,因而在大場景集成成像拍攝中并不適用。為了解決攝像機數量問題,有學者采用稀疏攝像機陣列法進行大場景3D拍攝,獲取場景各角度立體信息,最終得到視差圖像陣列,并通過構建的像素影射模型將其轉換為微圖像陣列,繼而實現3D拍攝[2]。
2 高分辨率集成成像3D顯示方法
集成成像3D顯示方法很多,下文重點就現階段研究熱點高分辨率集成成像3D顯示方法進行探討。集成成像3D顯示的性能參數是評價顯示效果的基本指標,主要包括觀看分辨率、觀看視角、深度范圍3種,其中,觀看分辨率是3D顯示最關鍵的性能指標,該參數直接關系著觀者的感受。該指標影響因素眾多,如顯示屏分辨率、微透鏡陣列焦距、中心深度平面與微透鏡陣列之間的距離、元透鏡口徑等,在實虛像模式下,中心深度平面的成像分辨率直接決定了觀看分辨率。通常而言,集成成像借二維顯示器的有限像素對光線、方向兩大類要素信息進行同步顯示,難免會導致空間分辨率下降,這是制約分辨率提升的最主要原因。較為典型地提升集成成像分辨率的方法是利用時分/空分復用法加以實現,包括增加采樣率、提高顯示屏像素密度兩種方法[3]。
2.1 增加采樣率
從某種角度來看,集成成像觀看過程猶如采樣,受采樣定理的限制,人眼從各單元透鏡采樣一個或多個像素拼接成所看到的3D圖像,因而單元透鏡數、節距等直接影響采樣率乃至觀看分辨率。為了克服采樣定理的局限性,J·S·Jang等學者引入移動微透鏡陣列技術,使拍攝、顯示的微透鏡陣列在雙目視覺暫留時間內迅速同步振動,并從不同位置對3D場景拍攝多組單元像陣列,顯示用的微透鏡陣列亦同步振動,在差異位置重構不同方向的光線,最終達到增加采樣率與觀看分辨率之效。然而,該法對機械振動要求極高,并不具備很強的實用性;隨后,Y·Kim提出移動針孔陣列法,其借助液晶面板生成自動控制的針孔陣列,并利用顯示畫面的改變實現針孔陣列的移動,配合對應的單元像陣列即可重構兩個3D圖像,這兩個圖像所包含的像素在空間分布位置上互為補充,因而一旦兩個模式在肉眼反映范圍內迅速切換,即可觀看到具有高分辨率的3D圖像。
2.2 提高顯示屏像素密度
顯示屏像素量直接反映了集成成像顯示系統所能呈現的信息量,因此,提升像素密度可達到高分辨率顯示之效。通常而言,可利用多臺投影儀空分復用地投影高像素數量的圖像,或以單臺投影儀時分復用地掃描投影多幅圖像,而這對掃描速度提出了較高的要求,即其必須高于肉眼的閃爍融合頻率。這兩種方法雖可提升像素密度,但也會導致系統復雜性大增。因此,也有學者提出以差異化焦距透鏡陣列分別進行顯示,配合單元像有效區域的擴大,以提升視覺分辨率,其原理如圖1所示,其中,圖1(a)為傳統集成成像單元像有效區域,圖1(b)為擴大單元像有效區域方法的原理圖,通過將EIA1單元像有效區域進行裁剪,作為新單元像顯示于EIA2中,即可使顯示區域面積大幅增加,使有效區域占用率提升至100%,極大地提升圖像分辨率[4]。
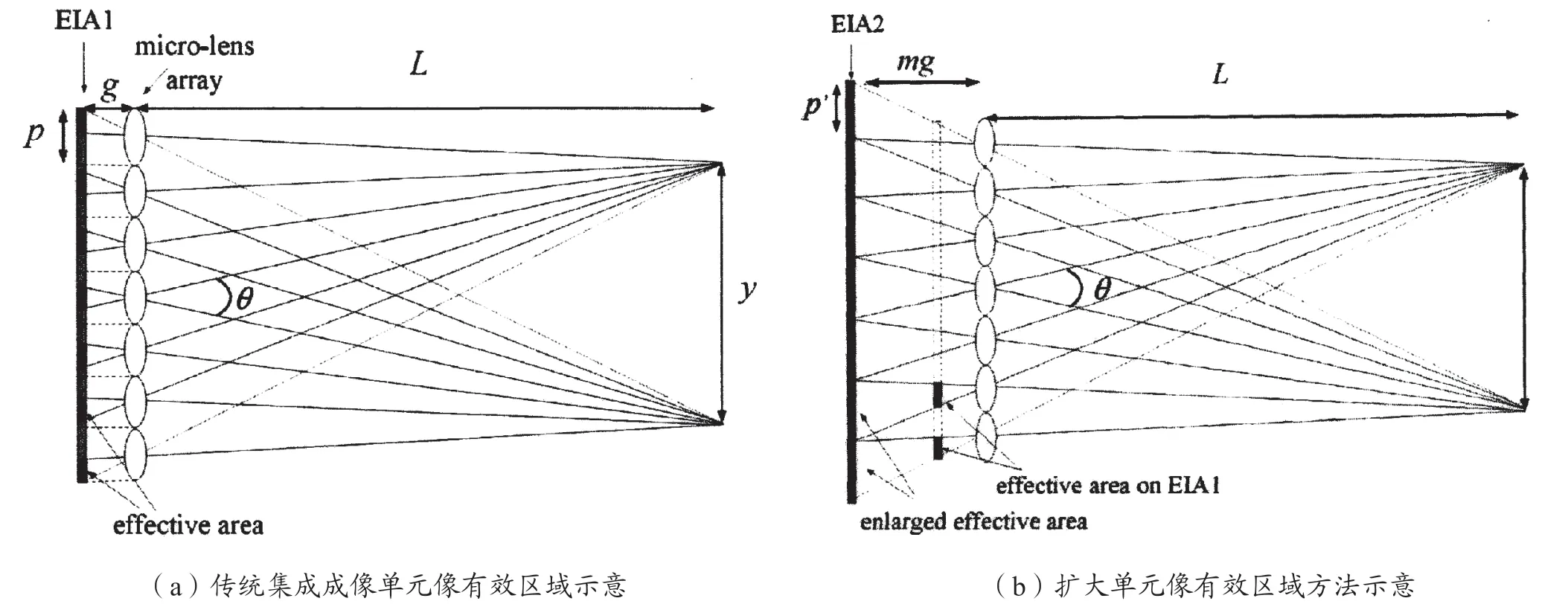
圖1 原理
3 結語
集成成像3D顯示技術被視為3D顯示技術最具前景的發展趨向,加上計算機、微透鏡陣列制備工藝、記錄及顯示設備等的高速發展與逐步完善,集成成像3D拍攝與顯示技術將在3D電視、印刷、深度測量、軍事、醫學、建筑等各項領域加速滲透,并將持續深入地改變人們的生活。然而,受原理、器件等因素的局限,集成成像3D拍攝與顯示技術的分辨率、視場角、深度范圍仍不甚理想,因此,還需進一步深化研究,探索頭部跟蹤技術、導光板、角錐回射器陣列、虛擬現實及增強現實等技術的引入,以尋求更優越的集成成像顯示方案。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
新聞傳播(2015年10期)2015-07-18 11:05:40
