基于仿生江豚魚群共融型裝置的設計與實現
2021-11-03 07:40:46孔祥洪黃小雙劉帆李炳麟王靜峰劉必林陳新軍
漁業現代化 2021年5期
孔祥洪,黃小雙,劉帆,李炳麟,王靜峰,劉必林 ,4,5,陳新軍,4,5
(1 上海海洋大學海洋科學學院,上海 201306;2 國家遠洋漁業工程技術研究中心,上海 201306;3 上海海洋大學工程學院,上海 201306;4 大洋漁業資源可持續開發教育部重點實驗室,上海 201306;5 農業農村部大洋漁業開發重點實驗室,上海 201306)
中國作為漁業生產大國,隨著水產資源在國民經濟中的地位逐步凸顯,各領域新興科技與智能設備的應用發展,智能化、集約化、自動化、現代化漁業裝備的需求越來越多[1-5]。為了降低養殖成本、減小勞動強度,提高池塘等人工養殖的效率,新興移動式智能投飼裝備的相關研究逐漸成為熱點[6-9]。挪威、瑞典、日本、美國等國家在漁業自動化投飼裝備上處于研究前列,在降低養殖成本、提高生產效率、提高水產品質量,提高飼料利用率等方面取得了較為顯著的成果[10]。日本NITTO SEIKO公司[11]研制的小型料倉投飼系統,通過每個小型養殖塘上方的網箱進行實時監測與遠程投飼。挪威Storvik公司[12-13]自動投飼系統中,以行車為基礎架構,利用移動物流車機器人進行電力滑車完成每個池塘的移動式投飼。國外自動投飼系統大多適用于工業化水產養殖,該養殖模式存在建設周期長、建設成本大、工業生產要求高等問題,在科技興農的推廣中存在一定難度,因此使用小型的移動式投飼裝備可行性更高。目前國內的自動投飼裝備主要為岸基拋撒式和船載拋投式[13],岸基拋撒式存在投放范圍固定、易造成部分水體污染等問題;船載式移動投飼彌補了岸基投飼的不足,但船活動范圍有限,不能航行于水草等復雜環境,且螺旋槳推進方式魚群驚擾大,環境共融性不足。
鯊魚、海豚等水生動物的高效游動機理已成為研究熱點[14]。特別是鯨目類的海豚因具有良好的減阻機制、極高的爆發加速度、較高的游動速度,還能完成躍水、空中轉體、滾翻、大曲率轉向、乘浪等高難度動作,成為仿生機器魚領域的重要研究對象[14-16]。仿生機器魚環境共融性的優勢[17-18],對漁業生產具有重要的意義與研究價值。由于機器仿生魚推進效率、推進方式等直接影響其水下負載力,受當前機器魚仿生推進方式的限制,目前主要研究熱點與應用方向主要集中于水產養殖智能監測等[19]方面,在移動投飼等方面的應用仍有不足。作為背腹式游動的水生生物,海豚游動需氧量較大,其游動軌跡呈波浪形以獲得更多氧含量,將其作為水產養殖業智能裝備具有一定優勢[15-18]。
本研究主要探究豚體高效推進游動機制,構建生物推進運動方程,設計開發仿生江豚機器魚,具備推進效率高、環境共融性強等優勢,實現池塘智能化移動投飼,解決傳統螺旋槳在養殖環境中對魚群的驚擾與環境共融性不足等問題,以研究一種魚群共融、能耗低的移動投飼設備與智能監測設備,進而提升水產業養殖現代化、監測智能化程度。同時,彌補仿生魚與魚群共融性試驗相關研究的欠缺,為魚類行為學機理與仿生機理探究提供參考。
1 仿生機器魚分析與設計
1.1 豚體幾何模型建立
在仿生海豚外輪廓建模過程中,需要對生物形態進行輪廓提取,鯨豚類生物樣本較難獲取,以相關研究[20]中的圖像為依據,進行豚體正視圖與俯視圖外輪廓擬合。圖1所示,為無喙鼠海豚生物圖像作為輪廓擬合曲線[21]。以豚體最前端為原點建立魚體坐標系O-xyz,研究中忽略背鰭對其生物形態與運動學模型的影響,對輪廓曲線平滑處理。

圖1 鼠海豚生物圖像與輪廓擬合曲線Fig.1 Porpoise bio-images with contour fitting curves
設定靜止狀態的豚體長度(即豚體最前端至尾椎骨末端長度)L為1,形態輪廓經最小二乘法擬合后,擬合方程的外輪廓擬合優度R2均大于0.99,正視圖輪廓擬合方程組O1(x)和俯視圖輪廓擬合方程組O2(x)分別為:
(1)
(2)
基于NACA(美國國家航空咨詢委員會)翼型方程[22],對豚體外輪廓曲線進行優化,對O1(x)與O2(x)與NACA翼型方程進行回歸分析,分別比較O1(x)、O2(x)與NACA翼型方程殘差平方和SSE1、SSE2,由于豚體正視圖外輪廓為非對稱曲線,采用NACA四位數族非對稱翼型[22],俯視圖采用NACA四位數族對稱翼型[23]。
表1為輪廓方程與翼型方程的回歸殘差平方和。上述兩種NACA翼型模型與描邊像素點的擬合優度R2均大于0.9,因此選擇NACA2421和NACA0018翼型方程分別作為靜止狀態的豚體正視圖輪廓方程C1(x)和俯視圖輪廓方程C2(x)[24],即對于海豚正視圖,輪廓方程為非對稱四位數翼型NACA2421[22],即NACA2421翼型方程中參數分別為c=1,m=0.02,p=0.4,t=0.21;對于海豚俯視圖,輪廓方程為對稱四位數翼型NACA0018[22],即NACA2421翼型方程中參數分別為c=1,t=0.18。其中,m—翼型最大彎度與翼型弦長的比值;p—翼型最大彎度處的位置;c—翼型弦長;t—翼型最大厚度。

表1 輪廓方程與翼型方程的回歸殘差平方和Tab.1 Residual Sum of Squares between outlines equations and airfoil equations
1.2 魚體運動學模型
相關研究[25-26]表明,魚體波動是影響機器魚共融性等仿生程度的重要因素,也是提高仿生性與機動性的重要指標之一,因此為提高移動投料平臺的環境共融性,建立鯨豚類背腹式推進魚體運動學模型。根據Lighthill理論[27],研究魚體體干線波動情況,豚體體干線的擺動沿x方向逐步增大,其魚體x位置處擺動的振幅方程為:
A(x)=p0+p1ep2x
(3)
式中:A(x)—魚體x位置處擺動的振幅;p0、p1、p2—振幅方程系數。
豚體體干線的波動方程為:
(4)

豚體體干線的運動方程為:
F(x,n)=A(x)D(x,n)
(5)
圖2為以體長L為單位的擺動角直角坐標系示意圖。

圖2 擺動角直角坐標系示意圖Fig.2 Illustration of the rectangular coordinate system of the wiggle angle defined
定義擺動角θ為o′A與x′軸的夾角。擺動角θ進行如下規定:靜止狀態的豚體擺動角θ0=0°;擺動角θ的正負表征豚體擺動方向,規定尾椎骨末端中心點A點向z′軸正半軸彎曲時,擺動角θ為正值,反之,擺動角θ為負值;擺動角θ的大小可表征豚體擺動振幅大小。
某一運動時刻n的擺動角為:
θ(n)=θmaxD(x,n)
(6)
最大擺動角為:
(7)
式中:Amax為最大振幅,l為A點至O′點的水平距離。
根據視頻資料與相關研究[28],發現海豚尾椎骨末端上下擺動的幅度為體長L的7.8% ~ 20%[14,21],因此表2所示為豚體運動模型參數。
表2 豚體運動模型參數Tab.2 Parameters of the motion model of the dolphin body


圖3 豚體體干線擺動曲線Fig.3 Illustration of the dolphin body wave during swimming
1.3 機器魚樣機設計
根據生物形態特點與結構特征,設計了一種柔性仿生江豚機器魚樣機,主要由以下3部分組成:頭部、尾部、鰭肢。設計樣機全長為50 cm,其中頭部占體長2/3,尾部占體長1/3。頭部內置通信模塊和控制模塊,可采用無纜通信和有纜通信兩種方式。頭部與尾部連接有俯仰驅動機構,胸鰭固定于頭部兩側起到穩流與平衡游動姿態的作用,同時這種形態有利于完成水下滑行動作,降低游動阻力以提高續航能力,仿生江豚機器魚高機動性和高負載性可以滿足長航時和大范圍作業的需求。如圖4所示為仿生江豚機器魚三維模型,依據該模型真實還原制作了柔性機器魚樣機,圖5所示為樣機模型,表3為樣機主要設計參數指標。
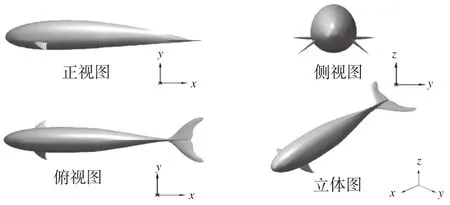
圖4 仿生江豚機器魚三維模型示意圖Fig.4 3D model of a bionic robotic porpoise fish

圖5 仿生江豚機器魚樣機Fig.5 Bionic robotic porpoise fish prototype

表3 仿生江豚機器魚樣機主要設計參數Tab.3 Main design parameters of the bionicrobotic porpoise prototype
2 仿生機器魚數值模擬
2.1 計算參數
為計算仿生機器魚水動力特性[29],表征豚體水動力特性的參數主要有升沉力系數Cl,阻力系數Cd和雷諾數Re
(8)
(9)
(10)
式中:Fz—豚體游動升沉力(N),Fx—豚體游動阻力(N),S—豚體濕表面積(m2)。規定沿z軸正方向為豚體游動升力方向,沿z軸負方向為豚體游動沉力方向。沿x軸正方向為豚體游動阻力正方向。
2.2 計算工況
計算域為圓柱形流場,長為6 L,流場直徑為6 L。利用Curvature和Proximity算法對該計算域進行四面體非結構網格劃分,網格最大面尺寸為0.1 m,最小單元尺寸設為5×10-3m,網格單元增長率為1.1,其余為默認設置,如圖6所示為數值模擬網格劃分結果。

圖6 網格劃分結果Fig.6 Structure of grids
計算域所涉及的介質為20 ℃液態水(密度ρ=998.2 kg/m3,黏度μ=1.003×10-3N·s/m2)。域的左邊界設置為速度v=15.3 m/s(即55 km/h)[20]的速度入口,初始壓強為0 Pa,而右邊界設置為壓力出口。圖7為計算域示意圖。

圖7 計算域示意圖Fig.7 Illustration of computational domains
在ANSYS Fluent 2020R2版本中,設置Coupled算法和Third-Order MUSCL離散算法求解SSTk-w兩方程湍流模型。其余為默認設置。
2.3 水動力性能計算
圖8所示為數值模擬速度云圖。流場中沿魚體x軸方向,魚體表面速度先增大后減小,江豚前部流速明顯加快,在外流場壓力差的作用下包裹渦旋在前部,而尾部表面渦旋脫落明顯。江豚通過彎曲體干線控制周身的水流與身體表面的邊界層分離,以渦旋的形式脫出,在江豚后側會形成產生推進力的尾渦和尾流,尾流可被認作由渦旋產生的向后噴出的射流[31]。前部的渦旋較好地包裹在表面,而尾部的渦旋則脫落明顯,所以尾渦主要由尾部脫落產生,并且后側的尾渦結構隨擺幅變化呈變大和變小的趨勢。
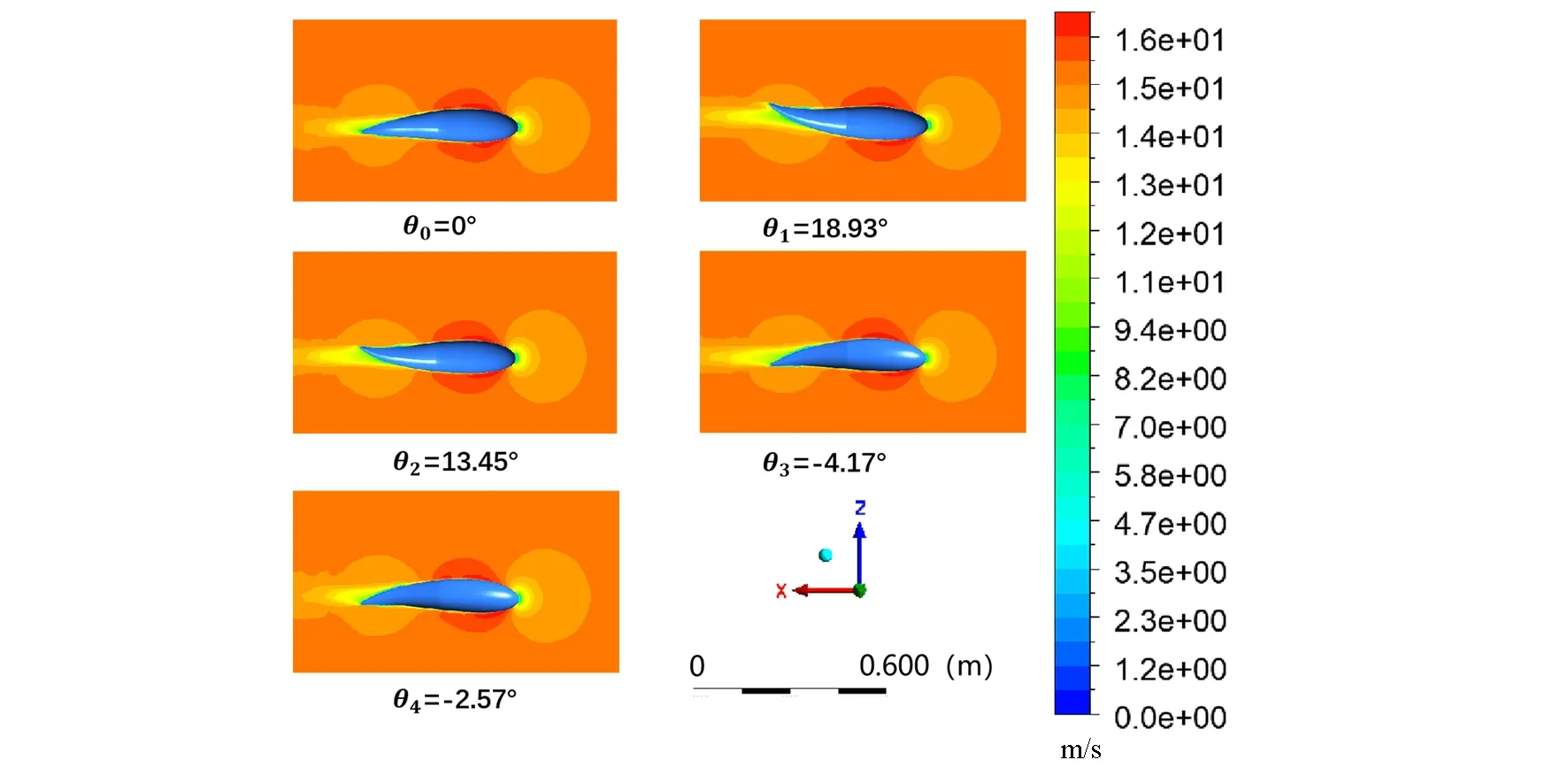
圖8 不同擺動角下的速度云圖Fig.8 Velocity clouds at different oscillation angles
江豚在下潛游動過程中,不僅獲得升沉力,也受到游動阻力。前側形成較大的正壓強,而后側形成較小的正壓強,形成從前向后的正壓強差,阻礙江豚向前游動。江豚尾部形狀的改變會引起游動阻力和升沉力的變化,見表4。相比于滑翔狀態的豚體阻力系數0.001 693,當尾部上擺時,阻力系數先減少后增大,當擺動角θ為13.45°時,阻力系數下降為0.001 683,減幅為0.6%,當擺動角θ增大到18.93°時,阻力系數上升到0.001 798,增幅為6.2%;而當尾部下擺時,阻力系數先增大后減少,當擺動角θ為-2.57°時,阻力系數上升到0.001 751,增幅為3.4%,當擺動角θ為-4.17°,阻力系數為0.001 704,增幅為0.6%。
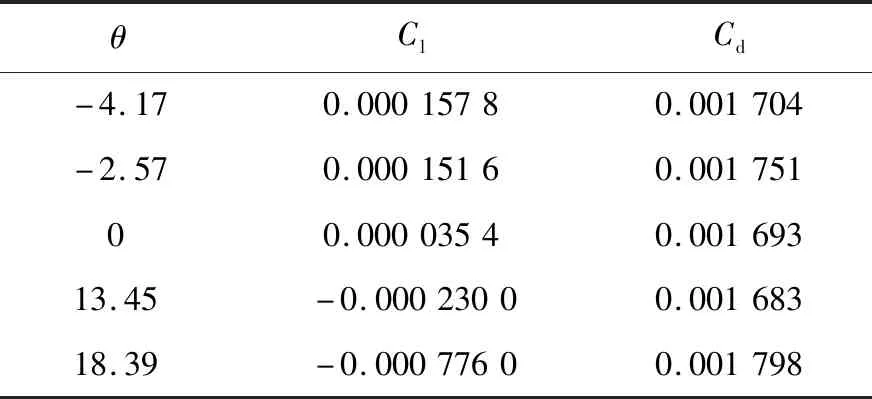
表4 不同擺動角下的水動力學系數Tab.4 Hydrodynamic coefficients at different swing angles
3 樣機試驗
為進一步分析仿生江豚機器魚在移動投飼作業中的可行性,根據本研究的CFD水動力學數值模擬與背腹式推進運動學模型,利用柔性仿生材料制作仿生江豚機器魚樣機,在上海海洋大學進行樣機池塘實地試驗。試驗地點為開放水域環境,并進行多次魚群共融性樣機測試。
仿生江豚機器魚以半徑約為1.5 m的范圍內進行水平面回旋游動,18 s內池塘中魚群出現聚集現象,且出現跟隨機器魚游動的現象,如圖9所示,為了區分池塘中所養殖的魚群,機器江豚為紅色樣機。機器魚以約為0.5 m/s的速度游動,t=0 s時池塘中魚為個體游動;t=3 s時周圍魚群向機器魚方向游動;t=6 s時機器魚周圍聚集較多魚群;t=9 s后魚群發生跟隨效應,跟隨機器魚尾流軌跡進行游動。在試驗中,樣機多次游動均有集魚現象與魚群跟隨游動現象。

圖9 仿生江豚樣機池塘游動試驗Fig 9 Bionic porpoise prototype pond swimming experiment
具有流線型的仿生江豚機器魚面向未來智能化移動投飼和養殖監測的研究方向,載荷量大、續航力強,且游動速度可達0.5 m/s,具有游動效率高、與魚群環境共融的優勢。航行過程中,基于背腹式推進運動模型,實現了魚群的共融,通過試驗發現魚群會跟隨機器魚游動軌跡進行集群游動,有效達到了移動投飼的效果。相關研究[31-33]也發現仿生魚的不同行為對斑馬魚的集群、應激等行為有不同的影響機制,在樣機試驗測試過程中,發現不同顏色江豚機器魚、不同擺動頻率與擺動幅度時,對于魚群的誘集均有不同的效果,因此在后續的研究中可以針對不同的游動參數[34]對魚群共融性進行研究探索。
4 結論
在仿生江豚機器魚的設計研究中,背腹式推進方式的游動為其提供了強大動力,構造流體外型對游動阻力的減少至關重要。數值模擬結果顯示,擺動角θ=0°的阻力系數為0.001 693,θ=13.45°的阻力系數為0.001 683,而θ=18.93°的阻力系數為0.001 798,該阻力系數數值相較于規則幾何形體較小,而剛性橢球體阻力系數約為0.5左右,因此推測流型與柔性體對于生物游動提高推進效率具有重要影響機制。研究設計了一種可用于智能水產養殖的共融性仿生機器魚,移動投飼機器魚可輔助相關養殖設備進行移動投飼,也可通過搭載水質參數傳感器完成養殖水環境動態監測與魚群監測,更好地服務與水產養殖的現代化與智能化。
□
