多波束漁用聲吶最優(yōu)工作頻點(diǎn)選取方法及探測(cè)性能分析
2021-11-03 07:40:46李國(guó)棟諶志新湯濤林
漁業(yè)現(xiàn)代化 2021年5期
李國(guó)棟 ,諶志新 ,湯濤林 ,陳 軍,程 婧
(1 中國(guó)水產(chǎn)科學(xué)研究院漁業(yè)機(jī)械儀器研究所,上海 200092;2 青島海洋科學(xué)與技術(shù)試點(diǎn)國(guó)家實(shí)驗(yàn)室,深藍(lán)漁業(yè)工程裝備技術(shù)聯(lián)合實(shí)驗(yàn)室,山東 青島 266000)
探魚(yú)儀作為海洋漁業(yè)中使用最廣泛、最典型的助漁儀器之一,有效地提高了海洋漁業(yè)的捕撈效率[1-3]。常見(jiàn)的探魚(yú)儀種類分為垂直單波束探魚(yú)儀、水平探魚(yú)儀、垂直雙頻探魚(yú)儀、分裂波束探魚(yú)儀和多波束漁用聲吶等[2],其中多波束漁用聲吶作為復(fù)雜度高、技術(shù)含量高的助漁儀器,可以獲得更遠(yuǎn)的空間探測(cè)距離和更高的角度分辨能力[4-7],在遠(yuǎn)洋漁業(yè)拖網(wǎng)、圍網(wǎng)捕撈對(duì)魚(yú)群的探測(cè)中有著廣泛的應(yīng)用,可以大幅度提高遠(yuǎn)洋漁業(yè)捕撈效率,也為未來(lái)海洋漁業(yè)精準(zhǔn)和選擇性捕撈提供了技術(shù)手段[8-10]。目前,中國(guó)多波束漁用聲吶僅有部分樣機(jī)開(kāi)展試驗(yàn)性海上測(cè)試,還沒(méi)有可大規(guī)模裝備漁船的商用儀器,極大地限制了中國(guó)海洋漁業(yè)捕撈效率和發(fā)展深度[11-12]。隨著中國(guó)在微電子、換能器材料、水聲圖像處理等新型技術(shù)領(lǐng)域的快速進(jìn)步,帶動(dòng)一大批漁用聲吶相關(guān)行業(yè)的發(fā)展,這必將為開(kāi)展多波束漁用聲吶關(guān)鍵技術(shù)攻關(guān)和自主研制創(chuàng)造了條件[10-12]。
考慮到漁用聲吶實(shí)際部署條件,尤其是漁業(yè)船舶噸位和長(zhǎng)度,多波束漁用聲吶換能器基陣尺寸受到限制,基陣的孔徑設(shè)計(jì)不能任意增大[13-14]。在換能器基陣尺寸一定的條件下,采用相對(duì)較低的工作頻點(diǎn),將有助于減少傳播損失,但這同時(shí)會(huì)降低陣列指向性和增大環(huán)境噪聲,從而綜合影響到多波束漁用聲吶的探測(cè)性能[15]。在對(duì)漁用聲吶性能的分析中,垂直漁用聲吶主要分析上述噪聲的影響,便可以選取主要設(shè)計(jì)參數(shù)及評(píng)估漁用聲吶性能[16-19],然而多波束漁用聲吶通常用作在一定傾角下的水平掃描探測(cè),水平探測(cè)距離不僅受到噪聲的影響,還受到界面混響和體積混響的影響,特別是遠(yuǎn)距離多波束漁用聲吶換能器基陣直徑通常在0.3~0.5 m之間,工作頻段在15 kHz~40 kHz之間[13],受到噪聲和混響的混疊影響作用,對(duì)多波束漁用聲吶研制過(guò)程中工作頻點(diǎn)的選擇、換能器基陣尺寸的確定及作用距離的預(yù)測(cè)等都會(huì)帶來(lái)較大的困難。
本研究從主動(dòng)聲吶方程出發(fā)建立了多波束漁用聲吶作用距離的預(yù)報(bào)模型,對(duì)換能器基陣尺寸、漁用聲吶最優(yōu)工作頻點(diǎn)和最大探測(cè)距離3者之間的相互制約關(guān)系進(jìn)行了仿真分析。首先在給定換能器基陣尺寸下,對(duì)不同工作頻點(diǎn)下的噪聲限制距離和混響限制距離進(jìn)行了對(duì)比分析,并綜合確定最優(yōu)工作頻點(diǎn);之后,對(duì)于不同換能器基陣尺寸的最優(yōu)工作頻點(diǎn)及最大探測(cè)距離進(jìn)行了分析,并給出了最大探測(cè)距離下的換能器基陣尺寸與最優(yōu)工作頻點(diǎn)的對(duì)應(yīng)關(guān)系。
1 多波束漁用聲吶基本原理及工作過(guò)程
漁用聲吶原理是采用多波束技術(shù),利用魚(yú)群對(duì)聲波的反射,來(lái)探測(cè)魚(yú)群信息的儀器。魚(yú)群密度、大小和種類等信息可以通過(guò)對(duì)回波信息的特征分析獲取。多波束漁用聲吶是采用換能器基陣中多個(gè)陣子發(fā)射和接收信號(hào)進(jìn)行相位控制,來(lái)實(shí)現(xiàn)發(fā)射和接收信號(hào)具有更高的指向性、更小的波束角,達(dá)到更遠(yuǎn)距離、高分辨率探測(cè)的能力[8-9,20]。
如圖1所示,多波束漁用聲吶由換能器、信號(hào)處理主機(jī)、顯控主機(jī)及升降機(jī)構(gòu)組成。當(dāng)進(jìn)行魚(yú)群探測(cè)時(shí),升降機(jī)構(gòu)將換能器降到保護(hù)罩以下,換能器負(fù)責(zé)水聲信號(hào)和電信號(hào)的轉(zhuǎn)換。多波束漁用聲吶通常采用多種形式的換能器基陣,如線型、平面型、圓柱型等[20]。圓柱型漁用聲吶換能器基陣能夠?qū)崿F(xiàn)水平全方位掃描,以及垂直近60°掃描,接近達(dá)到了以漁船為中心的三維空間整體掃描能力,在航行狀態(tài)下可以實(shí)現(xiàn)無(wú)盲區(qū)探測(cè)。船員根據(jù)作業(yè)時(shí)探測(cè)目標(biāo)特性、海況、天氣等因素設(shè)置漁用聲吶探測(cè)參數(shù)。信號(hào)處理主機(jī)根據(jù)相應(yīng)參數(shù)進(jìn)行發(fā)射和接收探測(cè)信號(hào)并進(jìn)行相應(yīng)信號(hào)處理,解算出探測(cè)結(jié)果目標(biāo)數(shù)據(jù),上傳到顯控主機(jī)。

圖1 多波束漁用聲吶系統(tǒng)組成Fig.1 The system configuration of a multi-beam fishery sonar
如圖2所示,由于硬件條件的限制,多波束漁用聲吶發(fā)射和接收過(guò)程有所不同。在定向發(fā)射過(guò)程中,采用定向旋轉(zhuǎn)方式,即在一個(gè)探測(cè)發(fā)射周期內(nèi),為了提高分辨率、集中能量輪流一次發(fā)射不同方位的窄波束去覆蓋一個(gè)扇形探測(cè)區(qū)域,發(fā)射波束密集,信號(hào)覆蓋越均勻,同時(shí),探測(cè)盲區(qū)越大,系統(tǒng)也越復(fù)雜。在接收過(guò)程中,基陣中多陣子同步接收回波信號(hào),并通過(guò)移相來(lái)形成多個(gè)接收波束,達(dá)到更高的分辨率和更遠(yuǎn)的探測(cè)距離的目的,實(shí)現(xiàn)對(duì)被探測(cè)魚(yú)群方位的確定。
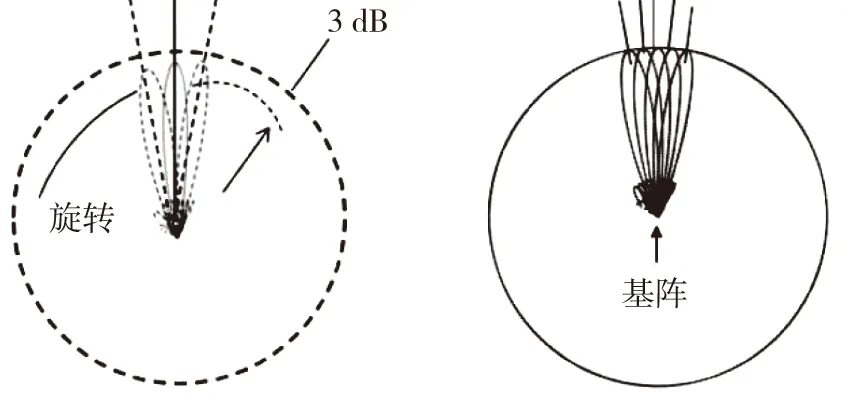
圖2 多波束漁用聲吶發(fā)射/接收過(guò)程示意圖Fig.2 Schematic diagram of transmitting/receiving process of multi-beam fishery sonar
2 作用距離預(yù)報(bào)模型及主要約因素
漁用聲吶作為一種主動(dòng)聲吶技術(shù)在漁業(yè)中具體應(yīng)用,其探測(cè)性能依據(jù)噪聲和混響限制條件可以分別表述為下列主動(dòng)聲吶方程形式[21]:
主要工作在噪聲干擾條件下:
SE=SL-2TL+TS-NL-DT
(1)
主要工作在混響干擾條件下:
SE=SL-2TL+TS-RL-DT
(2)
式中:SE為信號(hào)余量,dB;SL為聲源級(jí),dB;TL為傳播損失,dB;TS為目標(biāo)強(qiáng)度,dB;NL為環(huán)境噪聲,dB;RL為混響級(jí),dB;DT為檢測(cè)域,dB。
2.1 水聲信號(hào)在海水中的傳播損失
水聲信號(hào)在海洋聲信道中傳播,由于聲波陣面的擴(kuò)展,和傳播距離的增加帶來(lái)的損失稱為擴(kuò)展損失。多波束漁用聲吶一般使用在較深水域,這里以球面擴(kuò)展法則來(lái)計(jì)算擴(kuò)展損失[22]:
TL擴(kuò)=20lgr
(3)
式中:r為傳播距離,m。TL擴(kuò)為以聲源等效身中心為原點(diǎn),傳播距離為半徑,聲波擴(kuò)展帶來(lái)的損失。
海水質(zhì)點(diǎn)通過(guò)振動(dòng)來(lái)依次傳遞聲波能量。由于阻尼在振動(dòng)時(shí)的作用,聲波在海水中有部分能量會(huì)轉(zhuǎn)化為熱能,消耗產(chǎn)生的損失為吸收損失,表示為[22]:
TL吸=α(f)×r
(4)
式中:TL吸表示吸收損失,TL吸與頻率和距離有關(guān);α為海水吸收系數(shù),dB/km,與信號(hào)頻率f有關(guān)[22]。

+0.003
(5)
式中:f表示信號(hào)頻率,kHz。
綜上,水聲信號(hào)在海水中的傳播損失主要來(lái)源于上述兩方面?zhèn)鞑p失之和,表示為[22]:
TL=20lg(r)+α(f)×r
(6)
2.2 海洋環(huán)境噪聲
噪聲作為漁用聲吶工作過(guò)程中的主要干擾因素之一,其來(lái)源包括:熱噪聲、環(huán)境噪聲和自噪聲等。海洋環(huán)境噪聲是干擾水平漁用聲吶有效探測(cè)距離的主要因素之一,由風(fēng)浪、湍流及海水分子的熱運(yùn)動(dòng)等產(chǎn)生。海況和頻率直接影響深海噪聲譜級(jí)SPL的強(qiáng)弱,如:漁用聲吶常用頻段(15 kHz~ 200 kHz)在6級(jí)海況下的噪聲譜級(jí)比1級(jí)海況下高出20 dB。6級(jí)海況下深海噪聲譜級(jí)SPL的經(jīng)驗(yàn)公式為[23]:
SPL=52-20lg(f/103)
(7)
有指向性系統(tǒng)下寬帶噪聲級(jí)為[24]:
NL=SPL+10lgB-DI
(8)
式中:B表示信號(hào)帶寬,kHz;DI表示基陣的指向性指數(shù),dB。
2.3 圓柱型換能器基陣指向性
為了實(shí)現(xiàn)水平360°電子掃描,更高的探測(cè)效率和使用靈活,本多波束漁用聲吶采用圓柱型陣。圓柱型基陣的指向性指數(shù)約為[24]:
DI=10lg(5×h×D×f2)
(9)
式中:h和D分別為圓柱型基陣的高度和直徑,單位均為m。
如果漁用聲吶工作采用單扇區(qū),水平方向采用1/3周長(zhǎng)上陣子進(jìn)行發(fā)射和接收,其水平和垂直波束的半功率弧度開(kāi)角分別為[24]:
θh=88×2π/360×D×f
(10)
θv=76×2π/360×h×f
(11)
式中:θh和θv分別表示水平和垂直波束的半功率開(kāi)角,rad。
2.4 界面和體積混響級(jí)
水聲信號(hào)在傳播過(guò)程中,海面和海底對(duì)它的反射會(huì)在接收端產(chǎn)生界面混響,界面混響級(jí)公式為[24]:
RLS=SL-2TLR+Sb+10lgA
(12)
海水中分布的生物和無(wú)生命物質(zhì)以及海洋自身的不均勻性會(huì)產(chǎn)生體積混響,體積混響級(jí)為[24]:
RLv=SL-2TLR+Sv+10lgV
(13)

2.5 發(fā)射聲源級(jí)
在恒定發(fā)聲功率P下的水平漁用聲吶聲源級(jí),可以表示為[24]:
SL=10lgP+170.8+DI
(14)
式中:P為聲功率,單位是W。
2.6 單體魚(yú)和魚(yú)群的目標(biāo)強(qiáng)度
研究魚(yú)類的聲學(xué)目標(biāo)強(qiáng)度,可以分別從單體魚(yú)的目標(biāo)強(qiáng)度和魚(yú)群的目標(biāo)強(qiáng)度來(lái)分析。通常單體魚(yú)的目標(biāo)強(qiáng)度定義為[25-27]:
TS單=20lg(σbs/4π)
(15)
式中:σbs為魚(yú)體的聲學(xué)截面,m2,TS單可以理解為魚(yú)體對(duì)入射聲波產(chǎn)生的散射,與魚(yú)體的聲學(xué)截面積有關(guān)。由于無(wú)法直接測(cè)量入射聲波在魚(yú)體產(chǎn)生散射的等效面積,建立了目標(biāo)強(qiáng)度與體長(zhǎng)相關(guān)的經(jīng)驗(yàn)公式[25-27]:
TS單=algL+b
(16)
式中:L為目標(biāo)魚(yú)體體長(zhǎng),cm;a、b為回歸系數(shù),其可以根據(jù)目標(biāo)強(qiáng)度測(cè)定實(shí)驗(yàn)確定。
多波束漁用聲吶的主要探測(cè)目標(biāo)是魚(yú)群。當(dāng)平面探測(cè)聲波指向魚(yú)群且魚(yú)群處在聲波覆蓋范圍內(nèi)時(shí),魚(yú)群的回波可視為各條單體魚(yú)反射波按相位疊加的總和。如果僅簡(jiǎn)單考慮同相位疊加的情況,2條魚(yú)的回波聲強(qiáng)要比單體強(qiáng)1倍,即反射損失少3 dB,4條魚(yú)的回波聲強(qiáng)增強(qiáng)為單魚(yú)的4倍。由此可以推論,處在投射聲場(chǎng)范圍內(nèi),由n條相距較大的魚(yú)所構(gòu)成的平面散射魚(yú)群,其中總的目標(biāo)強(qiáng)度為[14,20,25]:
TS=TS單+10lgn
(17)
如果被探測(cè)目標(biāo)為一定容積的密集魚(yú)群,情況則變得較為復(fù)雜,由于魚(yú)群反射性質(zhì)上的改變,這時(shí)魚(yú)群反射強(qiáng)度大致與每立方米中的魚(yú)數(shù)成正比[20,25]。
2.7 檢測(cè)閾
漁用聲吶檢測(cè)閾值的計(jì)算方法可以表示為[24]:
DT=5lgd-10lg(BT)
(18)
式中:d為檢測(cè)指數(shù);BT為信號(hào)的脈寬和帶寬,s。
3 最優(yōu)頻點(diǎn)選取及探測(cè)性能仿真分析
3.1 仿真參數(shù)設(shè)置
多波束漁用聲吶的探測(cè)性能主要受限于其使用頻點(diǎn)、帶寬、換能器基陣尺寸及陣子數(shù)量等因素,而換能器尺寸和發(fā)射功率又受到部署漁船的條件制約,對(duì)于不同條件下多波束漁用聲吶最優(yōu)工作頻點(diǎn)及其最大探測(cè)性能存在一定差異。最優(yōu)工作頻點(diǎn)的選取主要考慮兩點(diǎn):一是在換能器基陣尺寸給定條件下,實(shí)現(xiàn)最大作用距離的工作頻點(diǎn);二是在最大探測(cè)距離給定下,實(shí)現(xiàn)最小換能器基陣尺寸的工作頻點(diǎn)。結(jié)合中國(guó)遠(yuǎn)洋漁船具體特點(diǎn)及典型多波束漁用聲吶現(xiàn)狀,采用的探測(cè)性能仿真參數(shù)如表1所示。

表1 多波束漁用聲吶探測(cè)性能仿真主要參數(shù)Tab.1 Main parameters for simulation of detection performance of multi-beam fishery sonar
3.2 不同干擾下的信號(hào)余量分析
在噪聲影響下,將式(1)展開(kāi)
SE=SL-2TL+TS-(SPL+10lgB-DI)-[5lgd-10lg(BT)]
(19)
化簡(jiǎn)為:
SE=2DI-2TL-SPL+NA
(20)
式中:NA=10lgP+170.8+TS-5lgd+10lg(T)為常量。
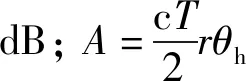
SE大小與DI、TL、SPL變化有關(guān),但工作頻點(diǎn)變化時(shí)3個(gè)參數(shù)隨之變化,如圖3所示,隨著頻率的增加DI和TL變大,而SPL變小,對(duì)SE的影響有所不同;同時(shí),基陣尺寸的改變也將影響指向性DI的改變。假設(shè)在基陣尺寸固定的情況下,這里存在最優(yōu)工作頻點(diǎn)求解問(wèn)題。
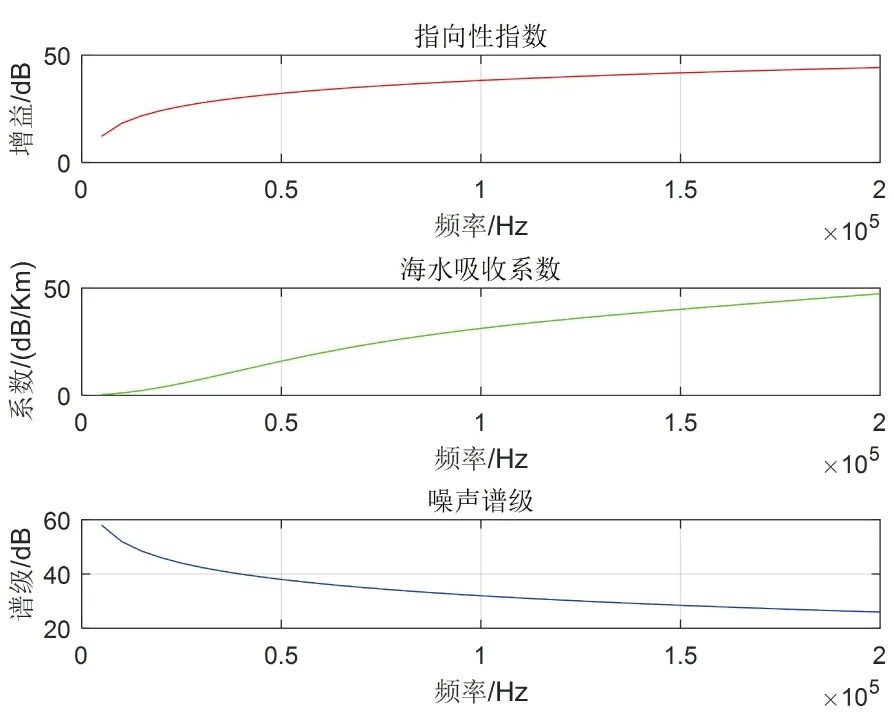
圖3 頻率變化對(duì)主要參數(shù)的影響Fig.3 The influence of frequency variation on main parameters
在界面混響影響下,將式(2)展開(kāi)
SE=SL-2TL+TS-(SL-2TL+Sb+10lgA)-[5lgd-10lg(BT)]
(21)
化簡(jiǎn)為:
SE=-10lgθh+SbA
(22)
同理,在體積混響影響下可化簡(jiǎn)為:
SE=-10lgθhθv+SvA
(23)

隨著頻率的增加,等效平面角10 lgθh和等效立體角10 lgθhθv會(huì)相應(yīng)地減小,導(dǎo)致在界面混響和體積混響影響下,對(duì)應(yīng)的信號(hào)余量也會(huì)相應(yīng)地增加,又由于等效體積角相較于等效平面角隨頻率增加減少得更快,因此,提高頻率可以明顯地降低體積混響對(duì)漁用聲吶性能的影響。
多波束漁用聲吶的最優(yōu)工作頻段通常工作在混響和噪聲混疊干擾區(qū)域,因此,對(duì)最優(yōu)工作頻點(diǎn)的判斷需要綜合考慮兩者的影響。
3.3 換能器基陣尺寸、最優(yōu)工作頻點(diǎn)和最大作用距離3者關(guān)系分析
由于漁業(yè)船舶一般相對(duì)較小,漁用聲吶部署空間有限,決定了漁用聲吶換能器陣尺寸往往受到一定限制。這里通過(guò)仿真不同漁用聲吶換能器基陣尺寸下的最優(yōu)工作頻點(diǎn)及該頻點(diǎn)下的最大作用距離,明確換能器基陣尺寸、最優(yōu)工作頻點(diǎn)和最大作用距離3者之間的相互關(guān)系。為了方便分析,這里假設(shè)換能器高度與直徑相等。由圖4可見(jiàn),隨著換能器基陣尺寸的增加,最優(yōu)工作頻點(diǎn)在降低,而最大作用距離在不斷增加。因此,在漁用聲吶部署條件允許的情況下,盡量增加換能器基陣尺寸,可以有效提高漁用聲吶的探測(cè)性能。

圖4 不同換能器基陣尺寸下的最優(yōu)頻點(diǎn)選擇和最大作用距離Fig.4 Optimal frequency and maximum operating distance with different transducer array sizes
在某些應(yīng)用場(chǎng)景,漁用聲吶的最大作用距離是一定的,這就需要確定換能器基陣最小尺寸時(shí)的最優(yōu)工作頻點(diǎn)。如圖5所示,實(shí)現(xiàn)最小換能器基陣尺寸的漁用聲吶最優(yōu)工作頻點(diǎn),隨最大作用距離的增加而降低。

圖5 給定最大作用距離下最優(yōu)工作頻點(diǎn)Fig.5 Optimal working frequency under given maximum operating distance
3.4 最優(yōu)工作頻點(diǎn)及最大作用距離分析
這里從以中層拖網(wǎng)漁船的使用需求出發(fā),在固定換能器基陣尺寸的基礎(chǔ)上來(lái)尋找達(dá)到漁用聲吶最大工作距離的最優(yōu)工作頻點(diǎn)。參考挪威Simrad公司SX90多波束漁用聲吶換能器基陣尺寸:高h(yuǎn)=0.356 m,直徑d=0.374 m,進(jìn)行仿真分析。
換能器基陣尺寸一定的條件時(shí),如圖6所示,在不同距離上,隨著頻率的增加混響干擾下的信號(hào)余量逐漸最大,但噪聲干擾下的信號(hào)余量存在先增加后下降的情況。令SE≥ 0 dB,可以檢測(cè)到目標(biāo),在距離1 km處工作頻率10 kHz~200 kHz均可以滿足要求;在距離2 km處工作頻率20 kHz~40 kHz才能滿足要求;在距離3 km僅有小部分頻點(diǎn)(25 kHz附近)接近滿足要求;在距離4 km均不存在3條信號(hào)余量曲線同時(shí)大于0 dB的情況,所以在該換能器尺寸條件下不能檢測(cè)到目標(biāo)強(qiáng)度為TS=0 dB的目標(biāo)。可見(jiàn)在給定換能器基陣尺寸條件下,最大作用距離是已經(jīng)確定下來(lái)了,我們?cè)O(shè)計(jì)過(guò)程更多的是需要考慮選用合適的頻段,來(lái)實(shí)現(xiàn)所研制漁用聲吶系統(tǒng)的最大距離。

圖6 不同距離上信號(hào)余量隨工作頻點(diǎn)的變化Fig.6 Variation of signal margin with frequency at different distances
圖7給出了噪聲、界面混響和體積混響干擾影響下的漁用聲吶最大作用距離,可見(jiàn)在換能器基陣尺寸固定情況,界面和體積混響干擾條件下最大探測(cè)距離隨著頻率的增加而增加,其中體積干擾的改善更為明顯;而噪聲干擾下最大作用距離隨著頻率的增加先增加后降低,存在最大作用距離求解問(wèn)題。由可見(jiàn),噪聲干擾下最優(yōu)工作頻率處界面混響限制距離小于噪聲限制距離,因此,此時(shí)的噪聲限制下最大距離對(duì)應(yīng)頻點(diǎn)并不是漁用聲吶系統(tǒng)最優(yōu)頻點(diǎn),最優(yōu)頻點(diǎn)選取需要尋找共同滿足噪聲限制距離和混響限制距離綜合最大處的頻點(diǎn)。
圖7 不同干擾影響下的最大作用距離Fig.7 Maximum operating distance under different interferences
由仿真結(jié)果可見(jiàn),漁用聲吶的最大作用距離,在15 kHz以下頻段以界面混響影響限制為主,在40 kHz以上頻段以噪聲影響限制為主,而在15 kHz~40 kHz頻段受噪聲和混響共同影響。同時(shí)滿足上述3個(gè)余量要求的最優(yōu)頻點(diǎn)為25 kHz,對(duì)應(yīng)的最大作用距離為2 600 m。
4 其他影響因素
4.1 海洋環(huán)境因素
本研究假設(shè)漁船在一定的海深、底質(zhì)和水體的條件下作業(yè),這些條件決定了仿真過(guò)程中的信號(hào)擴(kuò)展損失、體積散射強(qiáng)度和海底散射強(qiáng)度等具體參數(shù)值,而實(shí)際中漁船可能在不同海域作業(yè),可以在仿真中更多考慮不同的參數(shù),運(yùn)用多重優(yōu)化算法,選取適應(yīng)性更強(qiáng)的參數(shù)。
4.2 寬帶因素
上述分析均基于窄帶系統(tǒng),在最優(yōu)頻點(diǎn)附近10 kHz帶寬范圍內(nèi)各頻點(diǎn)的作用距離小于400 m,如果設(shè)計(jì)寬帶漁用聲吶,可以參考選取帶寬10 kHz左右。然而如果采用寬帶系統(tǒng),混響影響也會(huì)降低,可以適當(dāng)多選取低于最優(yōu)頻點(diǎn)的頻段。在寬帶條件下,不同頻帶帶寬對(duì)最優(yōu)參數(shù)選取的影響有待進(jìn)一步分析。
4.3 捕撈作業(yè)方式因素
不同的作業(yè)方式對(duì)最大探測(cè)距離的需求也不相同,如中層拖網(wǎng)需求在4~6 km。追求更遠(yuǎn)的探測(cè)距離,會(huì)占用大空間的漁船艙體,造成有限的漁船艙體空間浪費(fèi)。因此,對(duì)于漁用聲吶的研制應(yīng)從擬部署漁船的作業(yè)類型和特點(diǎn)出發(fā),在換能器基陣尺寸、最優(yōu)工作頻點(diǎn)和最大作用距離3者之間權(quán)衡最優(yōu)的參數(shù)配比。
5 結(jié)論
通過(guò)對(duì)噪聲和混響影響條件下多波束漁用聲吶最大工作距離、換能器基陣最小尺寸及最優(yōu)工作頻點(diǎn)3者關(guān)系的仿真分析,給出了圓柱陣多波束漁用聲吶最優(yōu)工作頻點(diǎn)選取方法及探測(cè)性能,分別對(duì)噪聲和混響影響條件下的探測(cè)性能進(jìn)行評(píng)估;提出了多波束漁用聲吶在部署條件或使用場(chǎng)景確定下的最優(yōu)化頻點(diǎn)選取方法,并評(píng)估了不同情況下的漁用聲吶探測(cè)性能,具體明確了適用于遠(yuǎn)洋捕撈場(chǎng)景中的換能器直徑在0.375 m,針對(duì)0 dB目標(biāo)魚(yú)群的最大探測(cè)距離為2 600 m,最優(yōu)工作頻點(diǎn)應(yīng)選取為25 kHz,本研究為后續(xù)自主進(jìn)行裝備研制、測(cè)試和試驗(yàn)提供了理論指導(dǎo)。
□
