時滯影響的兩輪自平衡小車的PID控制研究
2021-11-03 09:23:52南京林業大學張子璇解文周臺永鵬
電子世界 2021年18期
關鍵詞:信號
南京林業大學 張子璇 解文周 臺永鵬
兩輪自平衡小車本質是一種倒立擺,其控制原理為關鍵技術。考慮控制器、傳感器、驅動電機在平衡控制中的延遲現象,建立了兩輪自平衡小車的動力學模型,采取PID控制算法和Smith預估校正模塊的平衡策略,通過Simulink進行仿真研究。討論了階躍與正弦信號下時滯對小車的影響以及PID的控制效果。發現在控制環節中加入Smith預估校正模塊,能有效減小時滯的影響,得到更好的控制效果。
兩輪自平衡小車是一個典型的靜態不穩定系統,具有控制靈活、結構簡單的特點。其本質是一種倒立擺,在控制領域常常作為典型的控制系統來研究。
目前兩輪自平衡小車的平衡控制,常用方法有模糊控制、遺傳算法控制以及PID控制技術等。模糊控制在參數整定上較困難而遺傳算法的計算量較大,在實時控制以及時滯的應用很難實現,通常用于離線狀態的參數優化設計。時滯是指信號傳輸過程中的延遲,是廣泛存在于自然界中的一種物理現象。文中考慮了控制器、傳感器、驅動電機在平衡控制中的延遲現象,主要研究階躍信號與正弦信號輸入對自平衡小車平衡控制的影響,并根據系統的魯棒性和響應性調節PID控制器的參數,加入Smith預估校正模塊以期獲得良好的控制效果。
1 兩輪自平衡車動力學模型
自平衡小車的平衡控制主要是針對前進時的前后傾倒。在實際過程中的運動十分復雜所以我們需要提出合理的假設:(1)不考慮零部件之間的摩擦力和內部能量損耗。(2)不考慮直流電動機空載阻轉矩,電動機輸出轉矩直接為電磁轉矩。(3)小車的車輪和車體均為剛體。如圖1示以兩輪軸線方向為y軸,車體前進方向為x軸,過車輪軸中點豎直向上為z軸,建立坐標系。圖中M為車輪質量,m為車體質量,L為質心到車輪軸線的距離,r為車輪半徑,Tc為外界給車體的轉矩,θ為車體轉過的角度,Mω為電機給車輪的轉矩,Mb為電機給車體的轉矩,φ為車輪轉過的角度,Ff為地面給車輪的摩擦力。Fx,Fy,Fz分別為車輪組件在x,y,z軸方向上給車體的力。對車輪和車體進行受力分析,電動機對小車車輪的扭矩與電動機對小車車體的扭矩大小相等,方向相反,即Mω=Mb=u。根據牛頓第二定律,得到動力學方程:

圖1 受力示意圖
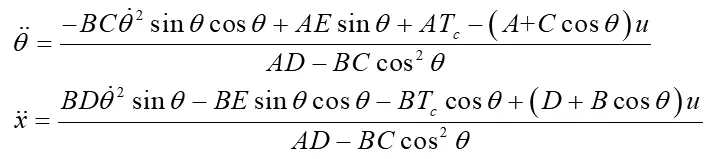
其中A=Iω/r+mr+Mr,B=rmL,C=mL,D=Ib+mL2,E=mgL,Iω為車輪的轉動慣量,Ib為車體的轉動慣量。
2 兩輪自平衡小車的控制模塊的建立
文中兩輪自平衡小車被控對象為車身傾角,根據傾角傳感器檢測到的傾角,通過PID控制器來調節電動機帶動轉子盤旋轉,轉子盤對車身的反作用力矩使車身平衡。我們考慮時滯的影響建立PID控制仿真模塊并對其進行分析。可以根據系統的響應性和魯棒性調節PID控制器的參數。調節參數Kp=-275,Ki=0,Kd=-18時,系統的控制效果較好。當時滯較大時僅僅利用PID不能得到很好的控制效果,可以加入Smith預估控制模塊以期得到更好的控制。圖2所示為Smith預估控制模塊。
3 仿真分析
3.1 階躍信號下不同延遲時間的仿真分析
圖3(a)所示為作用1s的階躍信號得到不同延遲時間的角度變化曲線。圖中無延遲時最大的傾斜角度約為0.235rad,5.8s后逐漸平衡;延遲時間為0.006s時的最大傾斜角度為0.239rad,平衡時間為6s;延遲時間為0.02s時的最大傾斜角度為0.25rad,小車在8s后平衡。隨著延遲時間的增加,小車的最大傾斜角度增加,平衡所需要的時間也增大。圖3(b)所示為在上述階躍信號下加入預估控制模塊,延遲時間為0.02s時不同提前預估時間的角度變化曲線圖。圖中無預估控制時傾斜角度為0.25rad;預估時間為0.02s時最大傾斜角度為0.232rad,平衡時間約為6s;提前預估0.04s時傾斜角度為0.225rad,平衡時間約為5s。
圖3 角度變化曲線圖
3.2 正弦信號下不同延遲時間的仿真分析
圖4(a)為1s的正弦信號得到不同延遲時間的角度變化曲線。圖中沒有延遲時最大傾斜角度為0.047rad,5.8s后回平衡狀態;延遲時間為0.006s時最大傾斜角度為0.048rad,5.9s后回到平衡狀態;延遲時間為0.02s的最大傾斜角度為0.052rad,8s后回到平衡狀態。圖4(b)為在上述正弦信號下加入預估控制模塊,延遲時間為0.02s時不同提前預估時間的角度變化曲線圖。提前預估0.02s和0.04s的最大傾斜角度分別為0.048rad和0.044rad,平衡時間約為6s。與無預估控制時相比較傾斜角度和平衡時間都減小,得到了很好的控制效果。
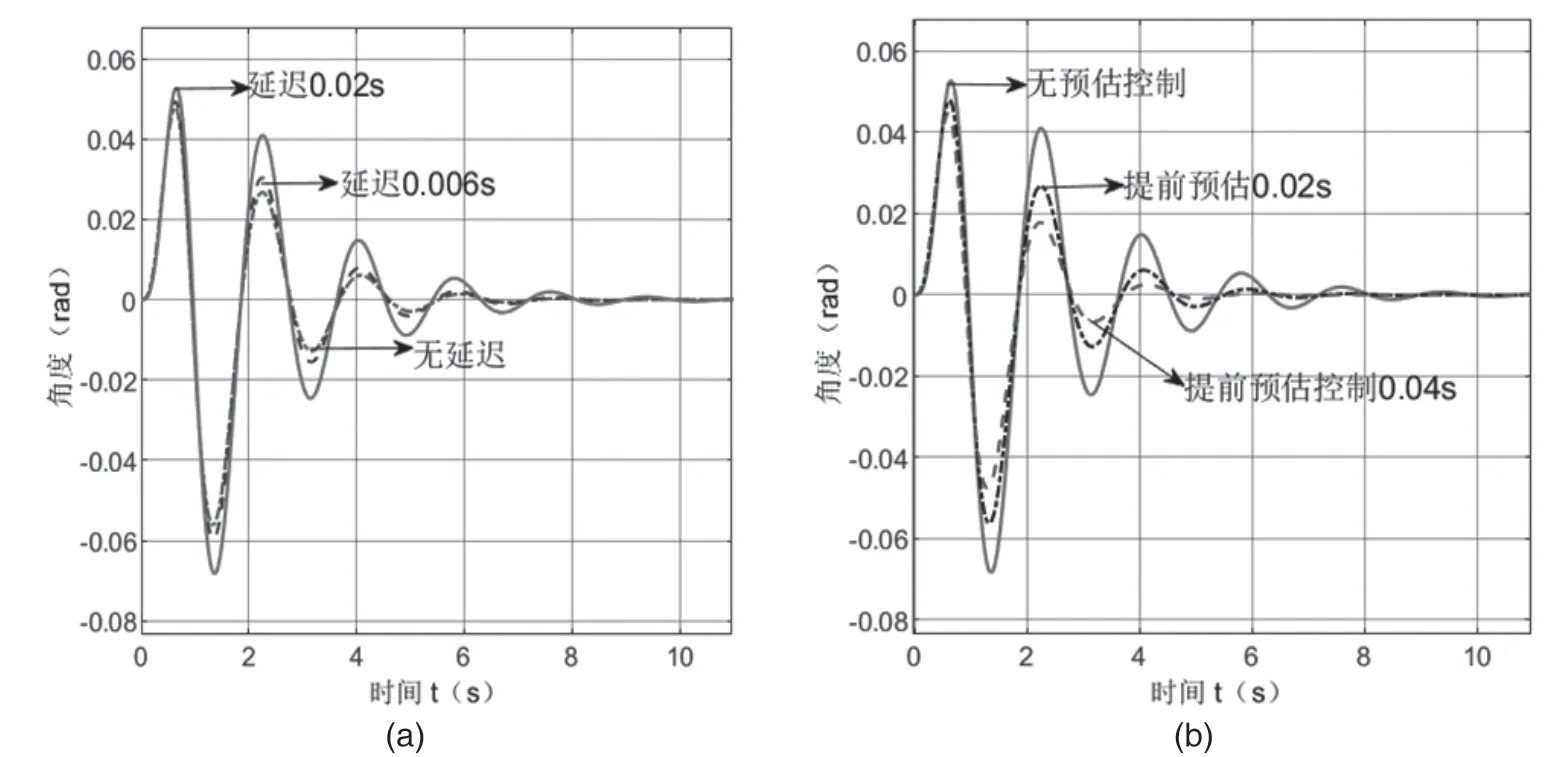
圖4 角度變化曲線
二輪自平衡小車是靜態不穩定、動態穩定的系統,具有非線性、多變量等特點。本文采取PID控制的平衡策略,對時滯影響的兩輪自平衡小車進行了動力學建模并利用了PID控制,同時加入了Smith 預估校正模塊對其仿真分析。在階躍信號下,延遲時間為0.02s的最大傾斜度為0.25rad,平衡時間為8s。在正弦信號下,延遲0.02s時最大傾斜角度為0.052rad以及平衡時間為8s。由此知在該PID控制器的控制下小車受突然的外力,傾斜角度較小同時能在較短的時間內回到平衡狀態。此PID控制器的控制效果很好。加入了Smith預估控制模塊對時滯影響進行提前預估。隨著預估時間的相應增加小車的傾斜角度減小,回到平衡狀態的時間也縮短。Smith預估控制模塊使得小車的自平衡控制得到了很好的改善。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06