LOS引導算法的UUV航行控制
2021-11-03 09:23:44中國船舶重工集團公司第七一五研究所
電子世界 2021年18期
中國船舶重工集團公司第七一五研究所 陳 俊
UUV在水下航行時,需要對其深度和航向進行控制。相對于定航向控制,定深控制更為復雜,通常需要對其俯仰角進行控制以達到控制深度的目的。針對定航向控制和定深航行中俯仰角難以控制的問題,使用LOS引導算法,為俯仰角的控制提供參考角度,使用改進的PID控制算法對其航向、深度進行控制,并結合模型,在Matlab中對設計的引導算法和控制控制算法進行仿真驗真,結果表明,引入了LOS引導算法的PID控制器具有良好的控制性能。
無人水下自主航行器(UUV)是一種能夠在水下自主航行的航行體,綜合了耐高壓材料技術、高速動(靜)密封技術、自主控制技術、水下目標定位技術、聲納及圖像識別技術等技術,能夠根據搭載的任務系統的不同執行不同的任務。在軍用方面,UUV已成為反潛戰、水雷與反水雷戰、水下載荷投送、偵查與識別的重要載體,多國海軍已有成型的裝備列裝部隊。而民用方面,UUV也被應用在海洋資源勘探、水下救援、海洋石油開發、水下通信等領域,促進了海洋經濟的發展。鑒于其在軍事及民用方面廣闊的應用場景,UUV近年來一直是各國科研技術人員研究的重點。
UUV在自主航行過程中,通常需要根據任務設定保持一定的速度,在某一深度沿著某個指定方向航行,這對UUV的自主航行能力提出了很高的要求。UUV控制系統設計的主要難點在于:系統模型高度非線性、波浪和海流的隨機性、強耦合性、強時滯性、運動學和動力學參數不確定性等,因此航行控制問題較為復雜。常規的PID控制器對航向控制能起到較好的效果,但深度控制往往因為俯仰角難以有效控制而導致振蕩,產生較大的誤差,且俯仰角不加以控制容易產生安全問題,一旦發生事故,可能造成巨大的財產損失。要獲得良好的控制效果,需對UUV的俯仰角進行控制,同時結合模型特點,采用一定的控制策略和安全管理策略,提升控制器的穩定性和安全性。
1 LOS引導算法設計
對于UUV的定深控制,需要控制UUV以一定的俯仰角度向設定的深度下潛或上浮,并且根據不同的深度偏差值及時調整俯仰角度,因此俯仰角的控制對于深度控制極其重要。過小的俯仰角無法快速地達到期望深度,過大的俯仰角雖然可以快速達到期望深度,但容易產生超調和振蕩,無法滿足精確定深的要求,甚至可導致安全問題。因此在定深控制的過程中,要根據深度誤差,實時調整期望的俯仰角度,控制UUV以合適的俯仰角運動,達到更好的動態特性。
為確保UUV安全準確地實現定深控制,設計俯仰角引導算法,在UUV航行過程中,實時提供參考俯仰角,并控制深度舵輸出,使得UUV跟蹤參考俯仰角,以平滑穩定的方式達到期望深度。
LOS(Line of sight)引導算法廣泛應用于軍事領域,是導彈制導中重要的引導算法。LOS引導算法一般包括三個點,即目標點、參考點和追蹤點,LOS引導算法是非常典型的三點式引導算法。在船舶運動控制中,LOS通常應用在路徑跟蹤和軌跡跟蹤中,用以為船舶航行提供參考的艏向角。其基本思想是根據船舶當前位置與期望值的橫向誤差值,得到一前向距離,由橫向誤差和前向距離計算期望的航向角,使得船舶沿著期望航向角航行,在航行過程中,實時更新期望航向角,最終使船舶駛向期望路徑并沿期望路徑航行。根據LOS的基本思想,將該引導算法應用到UUV的航行控制中,為俯仰角提供參考值。


圖1 LOS引導算法應用在UUV航行控制中
運用LOS算法,將深度控制轉化為俯仰角控制,因此UUV的水下深度和航向控制轉化為對航向角和俯仰角的控制。
2 控制算法及策略設計
2.1 控制算法
本控制算法基于一類UUV模型,在傳統PID控制算法的基礎上進行改進。
被控UUV的推進系統為主推帶舵的形式,其深度舵和航向舵垂直相交,舵的控制形式為電磁鐵的吸合帶動舵片運動,由于電磁鐵只有吸合和斷開兩種狀態,因此航向舵只有左/中/右三種狀態,深度舵只有上/中/下三種狀態。假定深度控制和航向控制解耦互不影響,針對航向和深度控制分別設計PID控制器。
航向控制為PID控制,計算給定航向和實際航向的偏差作為控制輸入,再由PID控制器對誤差量進行比例、積分、微分計算求和得到系統的輸出。深度控制為基于LOS引導算法的雙環控制,內環控制對象為俯仰角,外環控制對象為深度,內環的俯仰角由LOS引導算法給出參考角度,通過PID控制算法控制俯仰角來達到控制深度的目的。控制器結構如圖2、圖3所示。

圖2 深度控制器
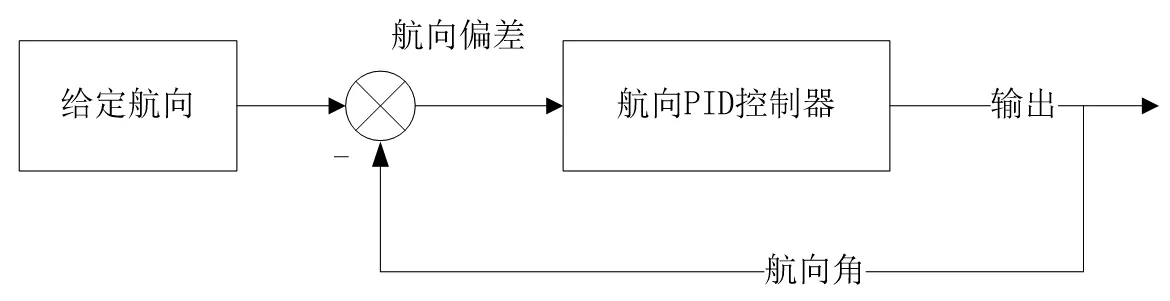
圖3 航向控制器
2.2 控制策略
考慮到UUV的模型特殊性和安全問題,在控制器設計時運用一定的控制策略,實現控制效果和安全性的提升。

但是對于UUV來說,當俯仰角和橫滾角超過一定的角度時,容易產生安全問題,因此控制器設計時引入對允許的最大俯仰角psi_max和roll_max橫滾角,當檢測到俯仰角大于psi_max時,深度舵停止輸出,當橫滾角度大于roll_max時,航向舵停止輸出,防止因俯仰角和橫滾角過大造成的UUV傾覆等嚴重問題。
3 仿真分析
為驗證所設計的LOS引導算法和PID控制算法的有效性,根據已經建立的UUV運動模型,在Matlab中進行航行控制仿真,該仿真過程為:UUV以固定的轉速按照任務設定的深度和航向航行,并在不同時刻給定不同的任務值。仿真時,以初始狀態為0時刻,0時刻時,航向角為0°,UUV所處深度為0m,T=0-300周期內,期望深度為0m,期望航向為120°;T=300-1000周期內,期望深度為20m,期望航向為0°,T=1000-3000周期內,期望深度為45m,期望航向為270°。
設計的控制算法涉及的控制參數較多,主要控制參數為:控制周期T_c=0.15s,course_output_min=1.2,psi_output_min=4,course_error_int_max=9.2,psi_error_int_max=12,roll_max=10,psi_max=30,航向PID控制器參數分別為Kpc=-0.1,Kic=-0.05,Kdc=-1,LOS引導算法參數為Delta_min=5,Delta_max=10,k=1,俯仰角控制參數分別為Kpd=-0.4,Kid=-0.015,Kdd=-3。仿真結果如下圖所示,圖5、圖6中,紅色虛線部分為任務設定值,藍色實現為UUV實際深度和航向。
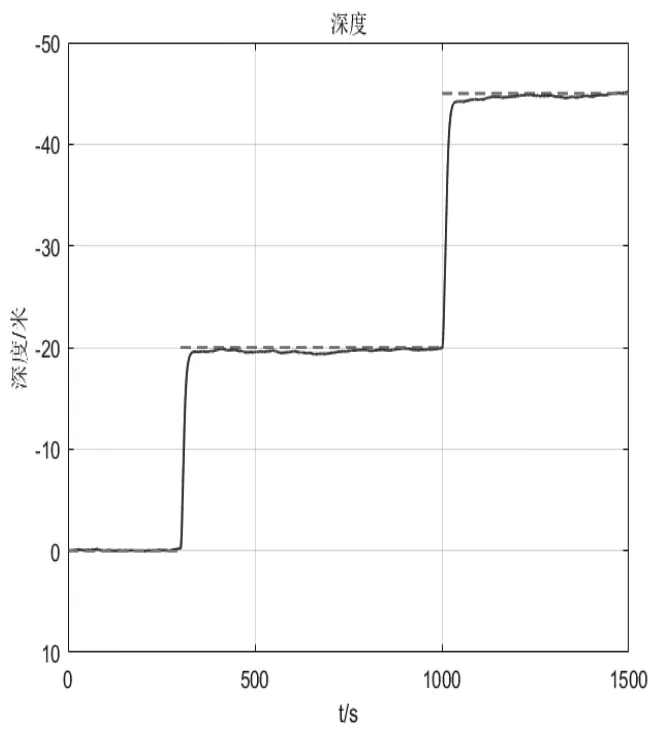
圖5 UUV深度軌跡
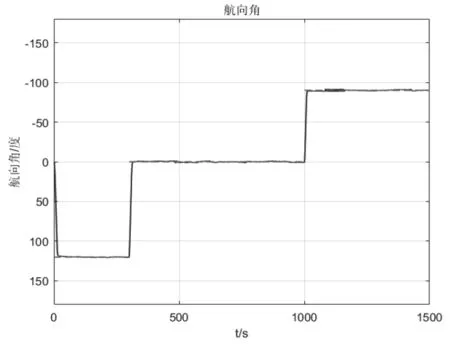
圖6 UUV航向角
從圖4可以看出,仿真過程中,UUV三維空間運動軌跡平滑順暢,宏觀上按照任務設定的航向和深度航行,航向和深度均能較快地達到期望值,且在穩定后能夠長時間保持,沒有明顯的超調和振蕩,從俯仰角曲線可以看出,在最大俯仰角的限制下,UUV俯仰角未出現超調和振蕩,在設定深度突變時,俯仰角及時增大,快速下潛至指定深度并能及時矯正至水平狀態,在期望深度附近保持水平的姿態航行。
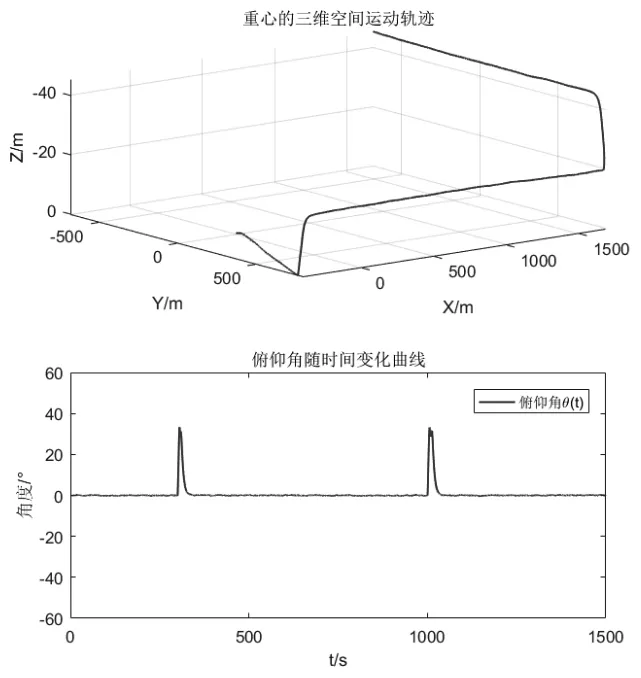
圖4 UUV三維空間軌跡圖及俯仰角
從圖5和圖6可以看出,得益于俯仰角的平滑控制,UUV的深度值和航向值均能跟蹤任務設定值,響應速度快,無明顯超調和振蕩。
圖7的舵角輸出曲線表明,深度舵和航向舵輸出平滑,大部分時間處在中位狀態,也未出現左右舵或上下舵頻繁交替的情況,在任務產生變化時快速響應,實現了對UUV深度和航向的有效控制,同時也有效地避免因打舵產生的機械磨損,減少能耗,保護舵的驅動機構。
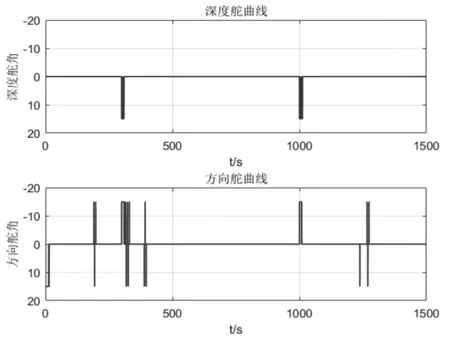
圖7 舵角輸出曲線
針對UUV水下航行控制問題,分別設計了航向PID控制器和基于LOS引導算法的深度PID控制器,其中深度控制器以俯仰角內環控制,外環為深度控制。在Matlab中的仿真結果表明,所設計的控制器能夠較好地完成水下定深和定航向控制任務,具有響應速度快,超調量小,控制穩定,輸出平滑等特點。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16