T型逆變器并網(wǎng)控制策略
2021-11-03 09:23:44遼寧工業(yè)大學(xué)孟麗囡
電子世界 2021年18期
遼寧工業(yè)大學(xué) 唐 源 孟麗囡
對(duì)于光伏并網(wǎng)發(fā)電系統(tǒng)來(lái)說(shuō),逆變器的并網(wǎng)控制策略是關(guān)鍵。針對(duì)比例諧振控制策略靜態(tài)性能較差,抗干擾能力不足等問(wèn)題,提出了比例諧振控制結(jié)合重復(fù)控制的復(fù)合并網(wǎng)控制策略,既能夠保留比例諧振控制對(duì)于正弦參考信號(hào)的無(wú)靜差跟蹤能力,又引入重復(fù)控制降低系統(tǒng)諧波含量。最后通過(guò)仿真驗(yàn)證了所提控制策略的可行性,能夠有效降低系統(tǒng)的THD值。
隨著人們對(duì)能源的依賴和強(qiáng)烈需求,使得國(guó)內(nèi)外將研究的焦點(diǎn)放在了能源的合理開(kāi)發(fā)和利用上。目前,太陽(yáng)能憑借其清潔、可持續(xù)發(fā)展等優(yōu)勢(shì)為經(jīng)濟(jì)和環(huán)境的和諧發(fā)展帶來(lái)巨大的希望,這種發(fā)展將導(dǎo)致世界各國(guó)更加專注對(duì)于光伏發(fā)電系統(tǒng)技術(shù)的研究,以確保發(fā)電系統(tǒng)的可行性并提高其效率、擴(kuò)大使用規(guī)模。而對(duì)于光伏并網(wǎng)發(fā)電系統(tǒng)來(lái)說(shuō),逆變器的并網(wǎng)控制策略則是關(guān)鍵。
最常用的控制方法是PI控制,該方法的優(yōu)點(diǎn)在于控制器的設(shè)計(jì)簡(jiǎn)單,且成本較低,但是由于該控制是在直流坐標(biāo)系下進(jìn)行,需要復(fù)雜的解耦過(guò)程,并且無(wú)法追蹤交流分量,存在穩(wěn)態(tài)誤差問(wèn)題。針對(duì)這一問(wèn)題,陽(yáng)喜提出了比例諧振控制(PR)方法,PR控制方法可以直接控制交流分量,實(shí)現(xiàn)無(wú)靜差跟蹤交流信號(hào),具有較好的動(dòng)態(tài)性能。但是PR控制器帶寬較小,除了在特定頻率處增益無(wú)窮大外,其它頻率處增益很小,抗干擾能力不足。針對(duì)上述問(wèn)題,本文以T型逆變器拓?fù)浣Y(jié)構(gòu)為基礎(chǔ),在準(zhǔn)PR控制中加入重復(fù)控制器,增強(qiáng)系統(tǒng)穩(wěn)定性的同時(shí)降低諧波含量。最后利用仿真驗(yàn)證了控制策略的可行性和有效性。
1 基于重復(fù)準(zhǔn)PR的并網(wǎng)控制策略
基于重復(fù)準(zhǔn)PR控制的LCL型并網(wǎng)逆變器雙閉環(huán)電流控制策略框圖如圖1所示。

圖1 雙閉環(huán)控制原理
其中G(s)為控制器的傳遞函數(shù);Kc表示電容電流反饋系數(shù);Kpwm表示逆變器等效增益。圖中內(nèi)環(huán)用于抑制傳統(tǒng)LCL濾波器的諧振尖峰,采用電容電流反饋方法。外環(huán)用于對(duì)并網(wǎng)電流進(jìn)行反饋控制,采用重復(fù)準(zhǔn)PR并網(wǎng)控制策略。
1.1 準(zhǔn)比例諧振控制策略
準(zhǔn)比例諧振控制是基于比例諧振控制改進(jìn)的一種方法,PR控制器在諧振頻率處有無(wú)窮大增益。如果將PR控制器的諧振頻率設(shè)置為基波頻率便可以實(shí)現(xiàn)對(duì)電網(wǎng)基波頻率的無(wú)靜差跟蹤。PR控制器的傳遞函數(shù)為:

其中,Kp為比例系數(shù);KR為諧振系數(shù);ω0=2πf0為基波角頻率。
由式(1)得到PR控制器在基頻ω0處的增益為:

由式(2)可以看出,該增益趨于無(wú)窮大,也就是PR控制器將一個(gè)無(wú)限大的增益引入到了其基波頻率處,其它頻率處的增益沒(méi)有變,所以PR控制能夠?qū)崿F(xiàn)并網(wǎng)逆變器輸出電流的無(wú)靜差控制。
本文采用的是一種準(zhǔn)PR控制器,在PR控制器上增加了零點(diǎn),其控制器的傳遞函數(shù)為:

1.2 重復(fù)控制策略
重復(fù)控制的基本思想來(lái)源于內(nèi)膜原理,它巧妙地構(gòu)造了一個(gè)“重復(fù)信號(hào)發(fā)生器”的內(nèi)膜,重復(fù)控制的離散形式為:

式(4)中N代表周期內(nèi)采樣次數(shù);Q表示積分衰減系數(shù);S(z)為補(bǔ)償函數(shù)。圖2所示為重復(fù)控制框圖。
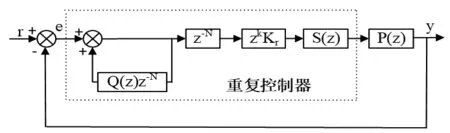
圖2 重復(fù)控制結(jié)構(gòu)圖
其中r為參考信號(hào);e為誤差信號(hào);z-N為周期延遲環(huán)節(jié);Kr為增益系數(shù);zk為超前補(bǔ)償環(huán)節(jié);S(z)為補(bǔ)償器;P(z)為被控對(duì)象;Q(z)為輔助補(bǔ)償器。
1.3 重復(fù)控制器的設(shè)計(jì)
通過(guò)對(duì)圖2分析可知,重復(fù)控制器的設(shè)計(jì)主要分為以下幾個(gè)部分:
(1)積分環(huán)節(jié)Q(z)。為了方便設(shè)置Q(z)=0.95。
(2)補(bǔ)償器C(z)是重復(fù)控制設(shè)計(jì)中最重要的,它決定等效控制對(duì)象在高頻段中的衰減能力,由以下三部分組成:
第一,二階濾波器S(z)的設(shè)計(jì)。二階濾波器能夠提高高頻段時(shí)的衰減速度,設(shè)置其阻尼比ζ=0.7,截止頻率取4KHz,得到最終的傳遞函數(shù)為:

第二,相位補(bǔ)償zk的整定。由分析可知,重復(fù)控制系統(tǒng)前端存在延時(shí)環(huán)節(jié),導(dǎo)致整個(gè)系統(tǒng)相位滯后,這時(shí)就需要zk來(lái)進(jìn)行相位補(bǔ)償。通過(guò)參數(shù)調(diào)試,選取k=5補(bǔ)償效果比較好。
第三,增益kr的選擇。kr的大小決定了抑制諧波能力的強(qiáng)弱,通常范圍在0~1之間,但是又不能等于1,因?yàn)楫?dāng)取kr的時(shí)候發(fā)現(xiàn)雖然能夠完全的抑制周期性諧波干擾,但是又暴露出穩(wěn)定性和魯棒性的問(wèn)題。故本文選取kr=9。
2 仿真驗(yàn)證
為了驗(yàn)證所提控制策略的正確性和可行性,在Matlab/Simulink中搭建T型逆變器仿真模型,仿真參數(shù)設(shè)置如下:直流側(cè)電壓為700V;直流側(cè)電容為3600μF;濾波電感L1=2.75mH,L2=1mH,R=3.03Ω,濾波電容為9.76μF;電網(wǎng)額定頻率為50Hz,其它參數(shù)按上文所提供設(shè)置。分別得到準(zhǔn)PR控制和重復(fù)準(zhǔn)PR控制下電流、電壓波形圖如圖3所示。

圖3 兩種控制下并網(wǎng)電流、電壓波形圖
對(duì)比兩張圖可以看到,當(dāng)系統(tǒng)采用準(zhǔn)PR控制策略進(jìn)行閉環(huán)控制時(shí),并網(wǎng)電壓和電流基本保持同相位,并網(wǎng)電流反應(yīng)迅速,能夠及時(shí)對(duì)參考電流進(jìn)行跟蹤。但是在0.15s后,系統(tǒng)受到了外界干擾,電流波形發(fā)生畸變。而基于重復(fù)準(zhǔn)PR控制策略的輸出并網(wǎng)電壓、電流波形均較好,并網(wǎng)波形質(zhì)量較高,雖然在前0.1s系統(tǒng)不穩(wěn)定,但是經(jīng)過(guò)短暫的調(diào)整,逐漸變穩(wěn)定。使用Powergui里的FFT工具,分別兩種控制下的T型三電平逆變并網(wǎng)輸出進(jìn)行傅里葉變換,進(jìn)而分析并網(wǎng)波形的諧波含量。如圖4所示,設(shè)置相同的起始時(shí)間為0.01s,頻率都為50Hz。

圖4 兩種控制下網(wǎng)側(cè)電流FFT分析對(duì)比
圖4(a)為準(zhǔn)PR控制下FFT分析圖,其THD=3.34%;圖4(b)為重復(fù)準(zhǔn)PR控制下FFT分析圖,其THD=0.72%。很明顯,重復(fù)準(zhǔn)PR控制的THD值更低,即對(duì)諧波抑制能力更強(qiáng)。
本文基于T型三電平逆變器模型,提出了一種將準(zhǔn)PR控制策略與重復(fù)控制策略相結(jié)合的復(fù)合并網(wǎng)控制策略,既保留了準(zhǔn)PR控制器對(duì)參考電流的無(wú)靜差跟蹤能力,同時(shí)引入了重復(fù)控制對(duì)周期性擾動(dòng)和對(duì)高次諧波良好的抑制能力,最后在Matlab/simulink仿真環(huán)境中,將準(zhǔn)PR控制策略和重復(fù)準(zhǔn)PR控制策略進(jìn)行對(duì)比,驗(yàn)證了基于重復(fù)準(zhǔn)PR控制策略具有良好的動(dòng)靜態(tài)性能,并能夠有效的抑制高次諧波。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26