礦井電牽引滾筒采煤機姿態控制電氣系統設計
2021-11-04 01:28:40郝小衛張亮亮
能源與環保 2021年10期
郝小衛,張亮亮
(山西呂梁中陽西合煤業有限公司,山西 呂梁 033400)
煤炭能源一直占據住我國能源結構的榜首,雖然目前我國正在大力發展新能源和實施綠色發展的環保戰略,但是今后很長一段時間內,我國對于煤炭的需求量還會持續增加,社會的發展需要煤炭提供能源支撐。煤炭開采工藝中引用了各類機械設備和電氣系統。其中采煤機作為直接與煤層接觸的機械設備,保證采煤機工作的穩定性并且提高氣開采效率是關鍵。采煤機將根據綜采工作面的工藝變換轉移位置并且調整工作姿態,以滿足煤炭開采的需要。電牽引滾筒采煤機是煤礦企業常用的開采設備,在實際工程中,依舊是采用人工跟機操作的工作方式對采煤機進行姿態條件,該類姿態調節方式缺乏智能化和高效性。面對綜采工作面智能化發展的趨勢,應該設計出一套應用于電牽引滾筒采煤機姿態監測、控制的電氣系統,解決目前采煤機在工作面地勢變化多端的情況下不能進行自動化姿態調節的瓶頸,擴大電牽引滾筒采煤機的適用范圍[1]。采煤機姿態控制系統的應用將擴大智能化電氣系統在礦井中的應用范圍,提升礦井安全生產本質化管理水平。
1 姿態控制系統的總體方案設計
1.1 系統需求分析
采煤機姿態控制系統主要針對采煤機在綜采工作面不同位置的信息進行獲取,并實時調整姿態的相位坐標。主要從姿態控制系統的任務分析和功能需求方面對其進行準確定義。
(1)姿態控制系統的任務主要分為4點:①檢測采煤機的位置和姿態數據;②通過高速攝像機對采煤機的工作狀態進行攝影;③監測采煤機的歷史工作數據;④根據數據反饋信息對姿態控制策略進行決策。
(2)對系統功能需求進行定義,包括信號采集、控制規劃、運動執行等3個層次的協調工作。首先通過對采煤機姿態的監測,根據數據圖像的采集方式并結合收集到的狀態數據,對姿態下一步位置進行預測。
1.2 系統總體方案
1.2.1 控制結構設計
根據煤礦企業對礦井電氣設備的控制策略,控制類型主要分為集中式控制和分布式控制。其中集中式控制對后臺計算機的性能要求較高,而分布式控制對于綜采工作面各電氣設施布置的合理性要求更為精細。由于礦井工作面分布范圍較廣,采煤機的移動范圍也隨之擴大。因此,選用分布式的控制方案,將控制系統分散至各個綜采工作面,通過多個工業處理器與姿態控制系統聯合運行[2]。分散式系統總體控制方案如圖1所示。

圖1 系統總體控制方案Fig.1 System overall control plan
1.2.2 系統硬件組成
采煤機姿態控制系統的硬件主要包括各類傳感器,對姿態進行監測、數據傳輸、接口通信等功能的實現。其中傳感器的選用應符合本質安全型設備,具有防水、防火、防爆等功能。最關鍵設備——電子羅盤是對采煤機姿態的平衡位置進行檢測,同時可對采煤機的傾角和擺角進行記錄。由于采煤機是通過液壓缸實現各個部件的動作,因此油缸內液壓油的壓力傳感器也是選型的關鍵。最終各類數據的采集,都將通過安裝在采煤機上的編碼器進行解碼,轉化為機器能夠讀取的數字信號。為提高采煤機姿態控制的精度,在采煤上對各類硬件進行布局,也需要進行深入論證。采煤機姿態控制系統硬件布局簡化后如圖2所示。
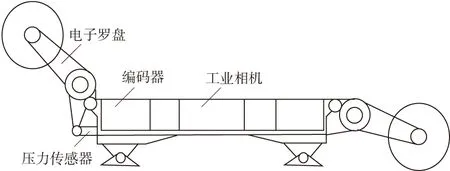
圖2 采煤機姿態控制系統硬件布局Fig.2 Hardware layout of shearer attitude control system
2 采煤機姿態檢測系統設計
2.1 位置檢測功能的實現
(1)定位方式分析。實現自帶控制系統的功能,首先應該對采煤機位置實施精準的檢測。根據采煤機的工作狀態,采煤機與液壓支架、刮板輸送機是聯動的機械設備作業集體。在明確采煤機工作位置時,應結合工作面位置和液壓支架、刮板輸送機的作業面位置聯合確定。面對復雜惡劣的作業環境,首先對位置定位方案進行確定。由于采煤機是通過鋪設在工作面的軌道進行位置的變化,可通過采煤機行走輪的轉動齒數對采煤機的位移情況進行判定。
(2)定位方案設計。明確了采用角位移傳感器測量采煤機行走輪角速度的方式對位移進行檢測。采煤機的多個行走輪的圈數和角位移數據通過編碼器采集后,會形成脈沖信號,通過數據總線傳輸至單片機芯片處理,此時單片機形成了上、下位機的數據輸送通道[3],定位方案如圖3所示。

圖3 采煤機位置檢測定位方案Fig.3 Shearer position detection and positioning scheme
由圖3可知,通過霍爾開關的直接校對,實現絕對編碼器在磁感應方面有較大的提升。不同電回路內的電子芯片兩端有電位差,使得霍爾開關的內部產生霍爾效應,影響了對感應磁場的靈敏性。因此,單片機芯片采用集成封裝工藝設計,同型號芯片也將在刮板輸送機的關鍵位置安裝,通過信號在同頻道的傳輸,編碼器可讀取多個位置傳輸的位置信號,實現最終的信號位置的統一校正。
2.2 姿態檢測方案
MG2×200/550-WD型采煤機配備有HMR3300型的三維電子羅盤[4]。該型號電子羅盤可通過周圍磁場的變化對空間位置進行確定。姿態檢測系統將通過電子羅盤對磁場的感應測量,對航向角、俯仰角和橫滾角等關鍵姿態參數進行記錄。電子羅盤依據的空間法則為笛卡爾坐標體系,采用右手法則,圍繞X軸右向旋轉為俯仰角、y軸右向旋轉為橫滾角、z軸右向旋轉為航向角。通過HMR3300電子羅盤的磁阻傳感器和橫滾傳感器的雙重測量,獲得數據存儲至電子羅盤的內部直接存儲器內。同時,電子羅盤與計算機的通信接口進行連接,經過PC端的解析計算采煤機俯仰角,對采煤機的姿態進行調節、修正。
2.3 采煤機視頻監視功能
除了對采煤機姿態控制的后臺智能調節,還將實現采煤機姿態的視頻監視功能。采用FA-IE088M型工業相機(圖4)對采煤機姿態動作進行抓拍,獲得高分辨率圖像,計算機可通過圖像分析采煤機的姿態狀態。FA-IE088M型工業相機適合對高速運轉的物體進行抓拍,每秒的幀率可達60幀。拍照圖像效果極佳,具有高達60 dB的信噪比[5]。視頻監測功能的實現,還需要對視頻信息的處理軟件進行開發。調取函數庫IEUCap(V4.7.0.0)連接硬件數據端口,將工業相機進行初始化設置。在完成數據采集后,在函數庫中調取相應的函數編碼,便可獲得視頻數據的圖像顯示。
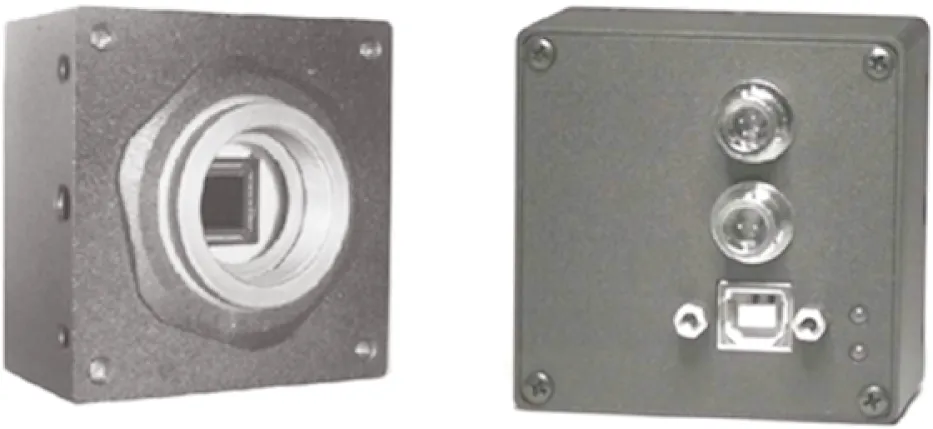
圖4 FA-IE088M型工業相機示意Fig.4 Schematic diagram of FA-IE088M industrial camera
3 采煤機姿態控制系統設計
3.1 姿態控制系統的整體性分析
采煤機并非是綜采工作面的一個絕對獨立的機械設備,受到液壓支架和刮板輸送機安裝位置的影響,采煤機擺臂的姿態受到工作面空間大小的影響,而整體的機身傾角姿態受到了刮板輸送機的影響。MG2×200/550-WD型采煤機作為電牽引滾筒采煤機,主要的工作姿態為機身傾角和搖臂傾角。當刮板輸送機的底板在工作面內安裝不平整時,就會影響采煤機的截割滾筒高度。而煤炭的開采高度,由擺臂的擺角決定。因此,采煤機任何一個姿態參數都由多個其他參數共同決定,如圖5所示。
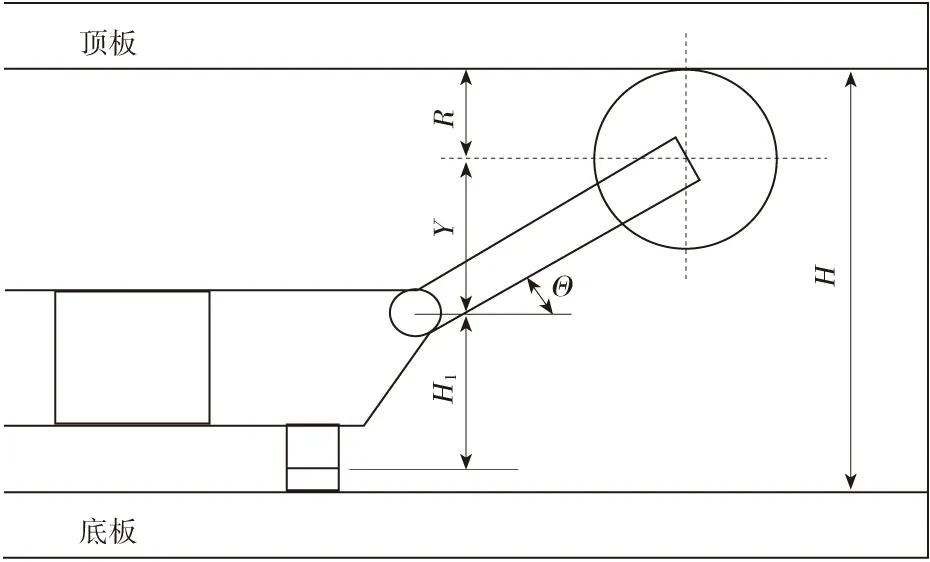
圖5 采煤機姿態調高模型Fig.5 Shearer attitude height adjustment model
采煤機的調高裝置是由液壓伺服系統完成,通過電磁閥控制液壓油的運動,液壓缸活塞推動液壓油完成零部件的動作。采煤機的姿態調整主要以滾筒高度、搖臂傾角、調高油缸行程變化量為主要的參數[6]。在系統軟件編程設置調高油缸行程為控制量,搖臂傾角為監測量。當綜采工作面呈傾斜狀態時,在計算采煤機機身傾角時,應結合搖臂的水平面傾角和底板傾角綜合計算。在設計采煤機姿態控制系統時,要充分考慮綜采工作面的傾角問題,尤其是采煤機在仰采煤炭時,由于底板不平整將加劇采煤機的整體波動。
3.2 控制方案設計
隨著時間的推移,煤礦地質條件會產生一定的差異性,在設計方案時應采用動態設計的理念。不同煤層夾雜的巖石硬度各不相同,采煤機的搖臂觸及到煤層時,會產生不同的油壓反應。系統將根據油缸工作壓力的變化,對采煤機運動姿態進行不斷修正。根據當前的采高對調高點的高度進行修正。首先記錄采煤機在正常煤層開采的壓力數值,其次對采煤機實現自動控制時的油缸壓力數值進行記錄,并將2個壓力數值相減獲得壓力差值。確保該差值在合理的誤差控制范圍內,如超過極限插值,將按照調高指令進行調整。控制方案誤差控制修正流程如圖6所示。
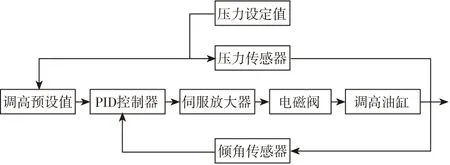
圖6 控制方案誤差控制修正流程Fig.6 Error control and correction flow chart of the control scheme
3.3 截割軌距調高制定
由于綜采工作面的作業底板凹凸不平,缺乏平整性,要求采煤機要根據實際情況實時調節對底板的適應性。采煤機在截割煤炭時,受到綜采工作面底板平整度的影響,需要根據煤炭的截割部位,調集采煤機的高度以及運動姿態。礦井技術人員會制動采煤機截割軌跡,按照擬定的速度向前推進。由于采煤機推進速度較低,同時液壓缸的伺服電機調解具有延時性,導致截割運動軌跡的自動調高不宜太過頻繁。為了提高采煤機姿態控制計算的效率,將單位面積內的綜采工作面劃分為30×30網格點的信息采集點,并且實現了多段同時調高點的信息采集。MG2×200/550-WD型采煤機的最大移動速度為7 m/min[7],而綜采工作面按照大約每200 m為一段,在設計采煤機滾筒姿態的信息采集點時,一個工作面內設置約30個點,假定采煤機按照6 m/min勻速運動向前推進。根據移動速度調整姿態控制系統,按照采煤機的移動速度對擺臂調高數據進行采集。姿態控制系統將發射調高指令電信號,同時輸出一個偏差電壓信號,該信號會控制電磁閥對液壓缸進行吸油動作[8]。此時的擺臂將上揚,當部件達到預定位置后就會發射反饋信號。反饋信號與偏差電信號相比較,2個信號的誤差值小于系統規定的參數后,將停止截割搖臂的調高動作。此時,采煤機便完成一次自動調高過程,如圖7所示。

圖7 采煤機截割軌距調高流程Fig.7 Shearer cutting gauge height adjustment process
4 姿態控制系統仿真結果分析
根據所檢測的物理量不同,通過仿真技術軟件模擬液壓伺服系統的工作特性,主要有3種典型的控制方式,即位移反饋、速度反饋和力(壓力)反饋。針對MG2×200/550-WD型采煤機自動調高系統,分析其在壓力控制方式下的動態特性。該系統主要由PID控制器、電磁換向閥閥、閥控液壓缸及負載和壓力傳感器等構成。電磁閥控制液壓油的流動方向,使得活塞產生往復運動,MG2×200/550-WD采煤機的采高范圍最大為2.0 m[9],由于液壓油具有液體的黏性,摩擦系數設置為1.36×105N·s/m,在初始運行階段應設置不小于1 MPa的最低啟動壓力[10]。

圖8 采煤機姿態控制系統仿真模型計算Fig.8 Calculation diagram of the simulation model of the shearer attitude control system
利用Matlab/Simulink軟件建立采煤機自動調高控制系統的模型。控制系統各部分在正常工作的各種工況下的延時是相同的,模型中不考慮各部分的延時對控制系統的影響。MG2×200/550-WD采煤機正常工作時調高油缸活塞腔內的壓力為7~18 MPa,因此在仿真模型中設定液壓缸壓力控制誤差限值為18 MPa。
4.1 油缸工作壓力正常時的控制系統仿真
假設t=3 s時刻,液壓缸的壓力值為p=10 MPa,煤層頂板落差為0.1 m,即系統的輸入r1=10,r=0.1。則在仿真系統中的仿真結果如圖9所示。
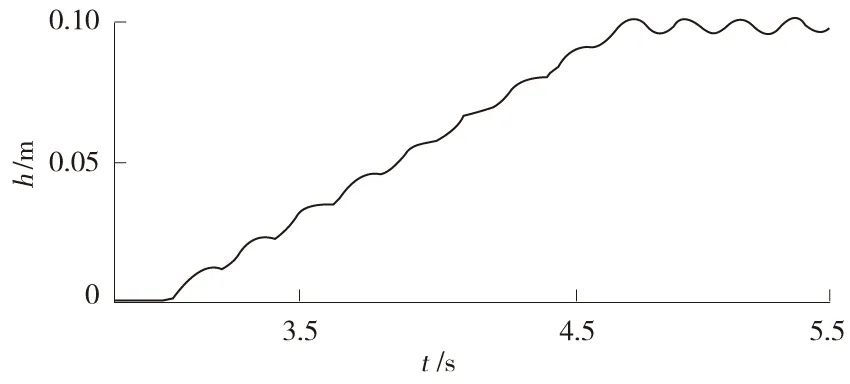
圖9 壓力控制與滾筒調高關系曲線Fig.9 Relationship curve between pressure control and drum height adjustment
上述情況下,液壓缸工作壓力在控制誤差限之內。當液壓缸工作壓力在控制誤差限以內時,調高系統根據調高指令來決定是否需要動作。所以調高系統依據調高指令進行動作。在t=3 s時刻,搖臂開始動作,在t=5 s時刻達到穩定。
4.2 油缸工作壓力超限時的控制系統仿真
當液壓缸壓力超出誤差控制限時,要先通過子系統if action 2來改變滾筒的位置,使其向液壓缸工作壓力減小的方向變化,待液壓缸工作壓力回到誤差控制限以內時,再通過調高指令決定滾筒高度是否需要改變。假定t=3 s時刻,液壓缸的壓力值為p=19MPa,煤層頂板落差為0.1m,即系統的輸入r=0.1,即r1=19。控制系統仿真結果如圖10所示。
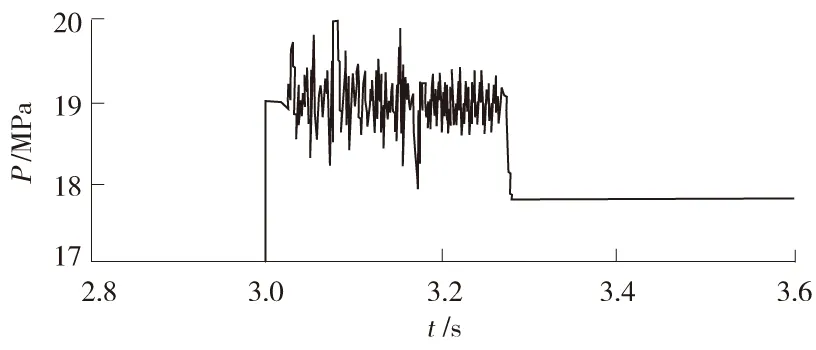
圖10 壓力超限后的變化曲線Fig.10 Change curve after the pressure exceeds the limit
在t=3 s時刻,當液壓缸工作壓力超限時,首先通過子系統if action2對控制系統進行調整,在t=3.3 s時刻壓力值回歸到誤差限以內。此時,再觸發調高指令子系統if action1對系統進行調整。由圖11可看出,在上述情況下,調高子系統也是在t=3.3 s時刻后才開始對滾筒實施調高,說明滾筒調高控制系統對系統的壓力監測響應良好。
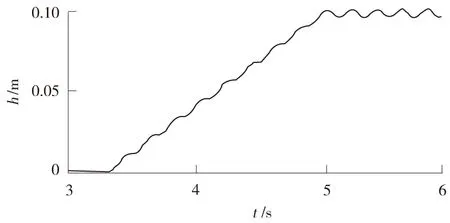
圖11 壓力超限情況下滾筒跟蹤曲線Fig.11 Roller tracking curve when the pressure exceeds the limit
通過仿真結果看出,該方案中,采煤機滾筒控制系統對液壓缸工作壓力監測狀況的響應良好,在壓力監測值由超限回復到正常水平后,滾筒調高模塊能夠迅速按照調高指令的命令對滾筒高度進行調整。
5 結語
針對目前采煤機在實際工程應用中所出現的工作姿態控制問題,以MG2×200/550-WD型采煤機為研究對象,根據該型號采煤機的工作特點,對其姿態控制和監測方案進行了設計。首先對姿態控制系統的任務、目標、需求進行了闡述,結合電牽引滾筒采煤機的實際工況條件,對姿態控制系統的硬件、軟件的需求進行了分析,并對軟、硬件在姿態控制運動控制方面的要求進行了規定。利用仿真技術軟件對姿態控制系統進行了建模,依據不同工況下的采煤機姿態模型,設計出采煤機姿態監測、檢測、控制一體化的控制系統,有效提升了綜采工作面的自動化水平、保障了煤炭物料開采的高效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
河南科技(2014年18期)2014-02-27 14:14:58