
基于PLC的自動洗車控制系統
2021-11-05 07:47:48北京聯合大學王豐周楊志成
電子世界 2021年17期
北京聯合大學 王豐周 楊志成
針對人工洗車速度低、操作環境差、人工成本高等問題,設計了一種基于PLC的自動洗車控制系統。該系統以歐姆龍PLC為控制核心,實現了自動洗車過程中的變速控制、自動吹掃、自動噴淋、自動吹干、故障報警等功能。為了解決了光電傳感器測量距離可調、與PLC兼容的問題,設計并制作了一款光電傳感器。為了解決了洗車速度低的問題,利用PLC控制器中的計數器對光電傳感器接收信號次數統計,并與比較器中預設的數值進行比較,根據比較值實現精確定位,將原來全程低速變為從定位處開始低速,為洗車節約了時間。
隨著汽車時代的到來,原來的人工洗車存在著洗車速度慢、人力成本高、勞動強度大得缺點,預計自動洗車成為洗車業主流。目前,自動洗車大多采用低壓電器控制,具有成本低、結構簡單、便于維護的優點;而低壓電器為主的自動洗車機存在速度慢、故障頻率高、適應性差、洗車潔凈度不達標等缺點,造成以上問題的原因是傳感器兼容性差、低壓電器過多、設備振動大、工作環境高溫高濕等問題。PLC控制器具有集成度高、穩定性強、兼容性好的優點,以PLC替代低壓電器,實現自動化洗車有較高優越性。因此,研究基于PLC的自動洗車系統具有自動化高、洗車速度高、適應性強的特點。自動洗車系統拖拽系統、噴淋系統、擦抹系統和吹風系統組成。通過四大系統的默契配合,可完成對汽車快速清洗。
1 控制系統工作流程及硬件構成
1.1 工作流程
整個系統的工作流程是:洗車工引導駕駛員將汽車開到移動拖拽鏈上,之后駕駛員將車定位空擋。拖拽鏈由拖拽電機驅動,其功能牽引汽車駛入洗車房。拖拽鏈下方有整齊排列從動滾軸,讓它與汽車輪胎形成滾動摩擦,減少拖拽電機的阻力。噴淋系統主要由一個水泵和多個電磁閥組成。擦抹系統由3組交流電機和3組清洗滾筒組成,清洗滾筒的外圍包裹著一層厚厚的用于擦抹汽車的雞皮布。待汽車被拖拽進入清洗房間后,噴淋系統啟動,控制水泵和噴淋電磁閥的啟停,可以對汽車不同位置的沖洗;稍后,擦抹系統啟動,清洗滾筒在電機的驅動下,汽車在沖洗過程中,擦抹系統和噴淋系統交互作業,不僅提高洗車速度,還可將沖下的雜物快速洗掉,防止劃傷汽車的玻璃和鈑金。吹風系統由風機、風道和風口組成,汽車清洗完成后,吹風系統啟動,分布在汽車周圍的風口同時吹向汽車,汽車快速風干,若在冬天,可考慮增加加熱系統。
1.2 硬件組成
全自動洗車系統由觸摸屏、PLC、扭力傳感器、光電傳感器等,還包括電動機,水泵、電磁閥,中間繼電器、加熱絲等。結構如圖1所示。
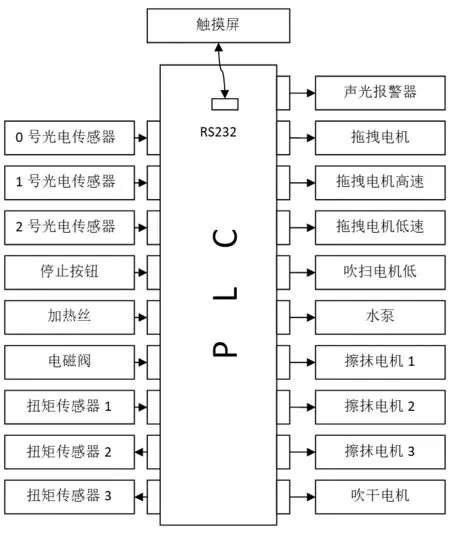
圖1 控制系統結構圖
(1)PLC控制器的特點
PLC選用OMRON公司的C級系列產品,其中CPU為CS1HCPU42—E,底板CS1W-BC023,I/O卡采用為輸入型CS1W-ID211,輸出型CS1W-OC211,模擬量卡為輸入型CS1W-AD081-V1作為監控核心,它有如下特點:1)處理速度快,最快處理速度達到0.04μs;2)I/O容量大,最多可達5120個點;3)指令范圍廣,除基本指令外還包括400余條高級指令;4)軟硬件兼容性好。通過以上的特點,OMRON公司的C級系列PLC,不僅能過滿足自動化控制系統的運算、容量、特殊需求,還能兼容上位機、多種傳感器和各種執行機構的需求。
(2)扭力傳感器
汽車的價格千差萬別,有的價格高達數百萬人民幣,一旦洗車中出現問題都不是小事,特別是在擦抹過程中,不能劃破漆面和玻璃。因此有必要安裝扭力傳感器,采用雙法蘭式靜態扭力傳感器MC10E-100N,安裝在擦抹系統電機的輸出軸上,當清洗滾筒與汽車接觸時,會形成一定的扭矩,根據扭矩的大小該扭矩讓傳感器輸出標準4~20mA電流信號,該信號反饋給PLC控制器。就能保障滾筒既能擦抹汽車表面,又不至于傷害到車身。
(3)可調測距光電傳感器
光電傳感器很多,但能直接能和PLC兼容的不多,因為市場上的傳感器多為3-12VDC,而PLC要用的是24VDC,PLC對傳感器的輸出阻抗要求也高,一般的傳感器達不到要求。為此,專門設計了光電測距傳感器,用于測量汽車在新車間內的具體位置。圖2中D0為發射管,D1為接收管。UA和UB是LM324比較功放電路的兩個門。UA將采集的信號篩選,不符合的信號切除。UB是將UA將輸出的信號電流放大,提高傳感器的可靠性。調整Rw1的阻值就是調整U1A要切除的信號標準;調整Rw2的阻值是調整UB要放大信號的門檻;調整Rw3的阻值是調整UB放大信號的放大倍數,放大倍數Au=Rw3/R6,倍數越高,穩定性越強,一般為10倍。
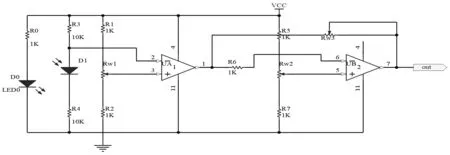
圖2 光電傳感器電路圖
2 控制系統程序設計
2.1 定位控制
汽車清洗采用流水線作業,這樣汽車經過洗車間的過程就是洗車過程,這樣設計的優點節約設備,減少投資。為了提高汽車速度,將原來的在洗車間內全程低速行進,而變成高低速結合行進,即在擦抹階段和吹風階段低速行駛,而其他階段高速行駛。這無疑給控制方面帶來難度,而變速行進的難度在于精確定位。為了提高定位精度,課題采用發掘PLC控制器的內部特殊繼電器眾多的優勢,利用PLC控制器中的計數器對光電傳感器接收信號次數統計,并與比較器中預設的數值進行比較,根據比較值實現精確定位,將原來全程低速變為定位處開始低速,其他時間為高速,節約了洗車時間。具體實現方法如圖3所示,在拖拽系統中,拖拽電機驅動主動輪。在主動輪的后方安裝一個對射型光電傳感器(2號光電傳感器)。主動輪上有凸齒,當光電傳感器的發射管和接收管之間有遮擋時,傳感器輸出為0,反之為1。當拖拽電機轉動時,就會帶動主動輪轉動,主動輪的轉動就會帶動主動輪的凸齒轉動,凸齒會對2號光電傳感器的遮擋,使得接收管處于通斷狀態,每個通斷都代表主動輪旋轉的角度,也能換算成拖拽鏈帶汽車前進的距離。也就能夠對汽車在洗車間內精確定位。
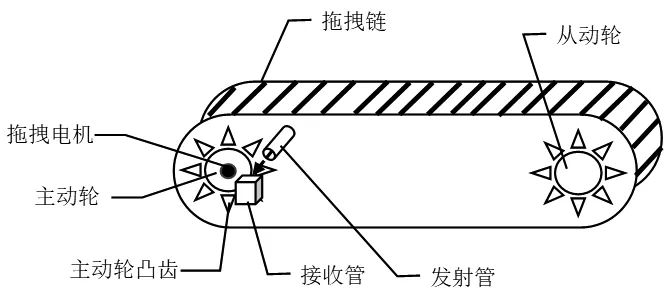
圖3 定位測量原理圖
2.2 PLC程序設計
圖4為控制系統流程圖。
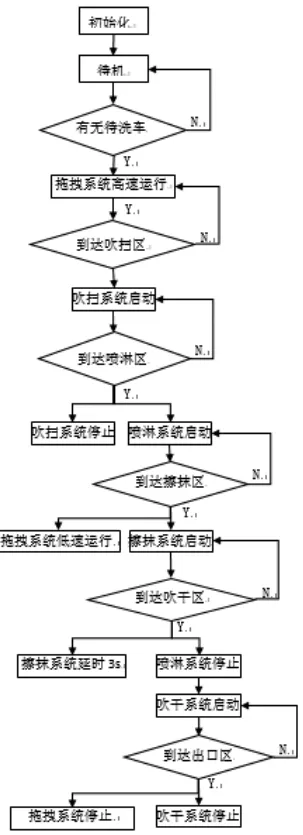
圖4 控制程序流程圖
系統上電后,程序進行初始化,隨后整個系統進入待機狀態。如果有汽車需要清洗,駕駛員駕車駛上有拖拽鏈的洗車平臺,0號光電傳感器檢測到汽車前端,拖拽電機啟動并高速運行。拖拽鏈將汽車載入洗車間。與此同時,2號光電傳感器也開始工作,拖拽電機驅動主動輪旋轉,主動輪旋轉的齒數以將通斷的形式,送到PLC控制器中。PLC內部的計數器會對拖拽鏈的運動情況統計,統計的數量與比較器的預制數數值時比較,當到達預制數數值時,吹掃系統、噴淋系統會相繼運行的,當到了擦抹處時,拖拽電機變成低速運行,同步啟動擦抹系統,關斷吹掃系統。由于拽電機變成低速運行,汽車經過擦抹段的時間相對會變長,同理,擦抹系統對汽車擦抹的時間變長,效果就越好。同樣到了吹干階段,控制系統會啟動吹風電機及加熱絲。
2.3 PLC選型和I/O口分配
項目采用歐姆龍(OMRON)PLC控制器,它相對于西門子、施耐德不僅具有價格優勢,它還有豐富的片上資源,便于開發和應用。關鍵點它的端子接口比較大,便于配線,對于洗車系統這樣集成度要求不太嚴格場合,更利于組裝操作。PLC的I/O地址分配如表1所示。工程師根據表1的I/O地址分配接線即可。

表1 I/O地址分配表
2.4 PLC控制梯形圖設計
根據自動洗車的工作流程以及拖拽系統變速運行的特點,采用計數器和比較器聯合的方式,編制PLC的梯形圖,主程序梯形圖(部分)如圖5所示。圖中計數器CNT0的設置值為#9999,實際中要遠比次數小,同樣比較器CMP(20)中的比較值也要根據現場測試,然后確定。
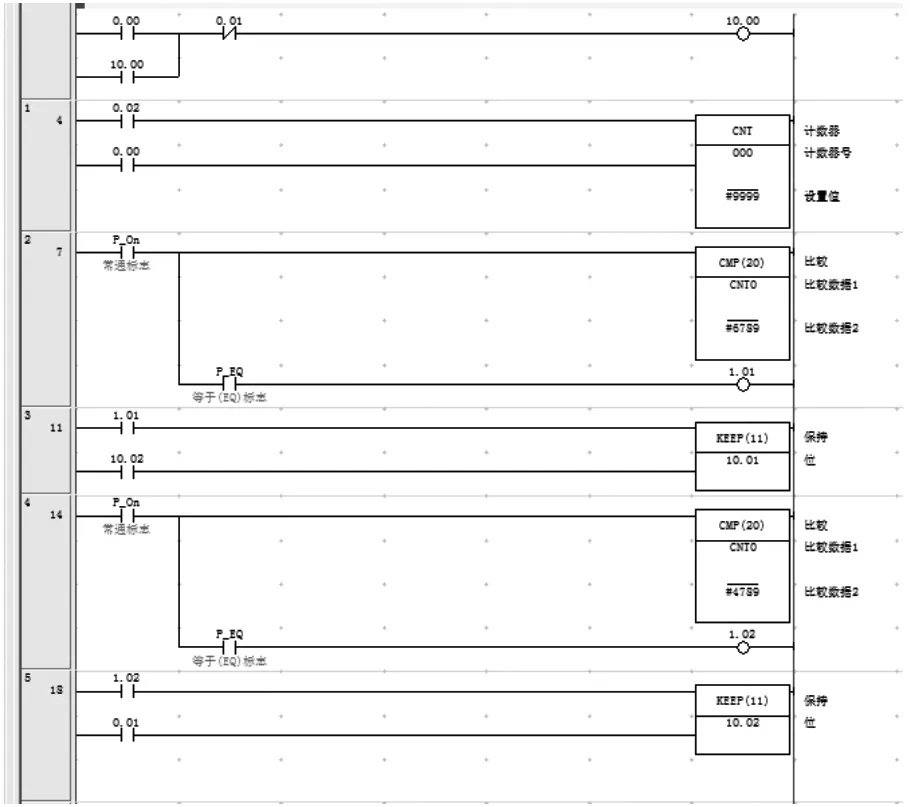
圖5 主程序梯形圖(部分)
3 控制系統調試
經過對洗車間設備的組裝和軟件系統測試完成的基礎上,需要對整個控制系統進行調試。由此可以發現存在的問題,確保洗車順利。首先檢查硬件設備的組裝情況,主要包括對PLC、光電傳感器、觸摸屏和停止按鈕等各設備的上電檢查,觀察他們的響應狀態,最后在聯機調試。在整個系統完全排除故障后,才可真車試驗。真車試驗如圖6所示。同時做好應急預案,防治漏水、漏電、運動傷害等。完成上述準備工作以后,對以下系統各項功能進行調試。
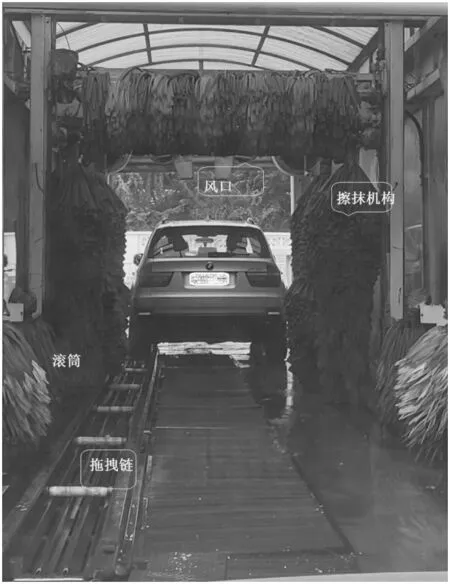
圖6 洗車試驗現場圖
(1)自動控制模式下,依次觀察、吹掃系統、噴淋系統、擦抹系統、吹干系統的運動狀態。
(2)自動控制模式下,按下急停按鈕,觀察這個系統的運行狀態。
(3)在手動控制模式下,觀察手動前進的運行狀態。
(4)在手動控制模式下,觀察手動倒退的運行狀態。
(5)設置故障點,觀察報警情況。
(6)將汽車污損,通過自動洗車,觀察被洗車輛每個部位的潔凈度,測試洗車潔凈率。
通過試驗,對同一車輛清洗,洗車速度由原來的3min20s,縮短為2min55s。節約時間25s。說明變速行進可以提高洗車速度。另外,對以上功能的調試非常重要,但不限于此,做好記錄,改善缺點,才能完善洗車控制系統的功能。
結束語:本文論述了一種基于PLC控制的自動洗車控制系統。實現了洗車中的變速行進、提高了洗車速度;采用內部計數器、比較器,減少現場的傳感器的安裝,避免環境惡劣對傳感器毀損而造成的事故;該控制系統已經成功應用于市內某洗車間。實踐證明,該控制系統安全可靠,改善洗車人員的工作環境,為洗車店帶來較好效益,推廣前景十分廣闊。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
