食品搬運機器人小臂的靜態(tài)分析與優(yōu)化
2021-11-06 11:40:14韋洪新王智森
包裝與食品機械 2021年5期
韋洪新,王智森
(景德鎮(zhèn)學院 機械電子工程學院,江西景德鎮(zhèn) 333000)
0 引言
機器人作為一種新興產業(yè),近年發(fā)展勢頭十分迅猛,在我國生產行業(yè)中承擔越來越重要的角色[1]。機器人由于精確度高、適應性強、穩(wěn)定性好等優(yōu)點逐漸獲得企業(yè)的青睞[2]。在實際的生產制造當中,食品搬運是一項十分費時費力且重復性高的工作。在工業(yè)生產制造技術不斷發(fā)展的過程當中,企業(yè)所需的人力成本逐漸增加,出現(xiàn)勞動力短缺的現(xiàn)象也越來越嚴重,食品搬運機器人由于它的種種優(yōu)點可以很好地完成食品運輸工作。由于食品搬運機器人的效率更高,對材料的利用率也高,可以大大地降低生產成本,企業(yè)擴大生產規(guī)模也變得更容易。這對推動食品工業(yè)生產制造產業(yè)發(fā)展壯大,提高產品質量,控制生產成本有巨大的作用。
我國對食品搬運機器人的研究起步較晚,與國外技術相比還存在一定差距。機器人的結構在設計的過程中,除了滿足相應的強度、剛度和工作受載條件外,還應當盡量輕便,提高機器人節(jié)約材料,實現(xiàn)優(yōu)化等效果。近年來,我國研究人員對食品類機器人進行了相關研究。為滿足單體食品在搬運過程中的自動化分揀,蔣毅等[3]采用ADAMS和SimDesigner方法對機器人虛擬樣機進行了分析,為機械臂的設計和驅動電機的選擇提供了參考。針對食品包裝箱碼放的實際要求,陳亞琳[4]采用ADAMS軟件和D-H法對機器人的選型及控制系統(tǒng)的設計提供了理論依據(jù)。趙相博等[5]對食品冷藏箱碼垛機器人進行了路徑規(guī)劃,利用直線和插值多項式,為機器人在搬運中各點的位置準確性提供了技術支撐。本文在SolidWorks中建立食品搬運機器人小臂的三維模型,通過分析計算求出小臂的受力情況,并進行有限元靜態(tài)分析,在此基礎上進行形狀優(yōu)化設計。
1 食品搬運機器人的結構分析
食品搬運機器人的結構主要由傳動軸、大臂、法蘭、小臂、連桿等主要部件及附屬零部件組成,整體模型如圖1所示。其中底座起支撐作用,大臂通過連桿傳動軸和小臂箱體分別與連桿和小臂相連,承受驅動臂座以上載荷。小臂左端與小臂箱體連接,右端與前爪法蘭相連。腕部中心軸為末端執(zhí)行器,通過旋轉法蘭和前爪法蘭將所受載荷傳遞給小臂。
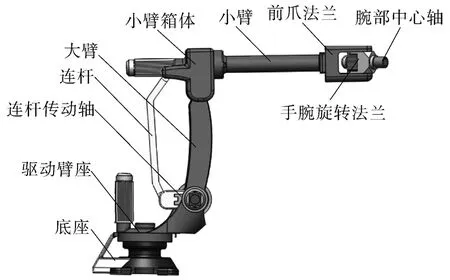
圖1 食品搬運機器人Fig.1 Food handling robot
小臂是連接機器人抓手與大臂的關鍵部件,其強度和剛度對機器人的工作精度有直接影響。因此,研究食品搬運機器人小臂的受力狀態(tài),優(yōu)化結構設計對機器人提高整體性能具有十分重要的作用。
2 小臂的結構與靜態(tài)分析
2.1 幾何模型的建立
ANSYS軟件在處理結構的力學等分析中具有強大的處理功能,但在幾何模型的構建中存在一定的不足,比較繁瑣。三維模型的建模中常用的軟件有UG、Pro E、SolidWorks等,本文選擇SolidWorks軟件對食品搬運機器人的小臂進行實體建模。在模型的構建中,保證強度和剛度的同時,忽略與分析影響不大的細節(jié),如小的倒角、螺紋孔等[6-7]。將建立好的模型保存為.x_t格式,并將其導入到ANSYS Workbench中。
2.2 小臂的有限元模型
小臂的材料選擇硬質鋁合金,相關的材料屬性:密度2 780 kg/m3,泊松比0.29,彈性模量6.9×104MPa,抗拉強度 370 MPa,屈服強度 125 MPa。單元類型設置為SOLID187,在劃分技術中選擇自由網格,同時設定網格單元尺寸為10 mm,將相關參數(shù)輸入到分析軟件中,生成164 663個節(jié)點,235 948個單元,劃分后的有限元模型如圖2所示。

圖2 小臂的有限元模型Fig.2 Finite element model of forearm
2.3 分析載荷受載情況
食品搬運機器人在工作時,小臂的受力情況隨其他零部件結構位置的改變而變化。經分析可知,當小臂與小臂箱體、前爪法蘭、手腕旋轉法蘭及腕部中心軸處于水平位置,即圖1所示位置時,小臂所承受載荷量最大,產生的變形和位移最大。在對小臂進行靜態(tài)分析時,以此時的受力狀態(tài)為研究對象。由原始設計參數(shù)可知,機器人所能抓取的最大載荷為90 kg,小臂右端零部件的總質量為22 kg,在計算時將右端物體和零部件視為剛體,簡化為施加在小臂右端的力F物和力矩M1,小臂的質量為51.8 kg,其重心位置距離大臂335 mm,機器人的受力及結構尺寸簡圖如圖3所示。
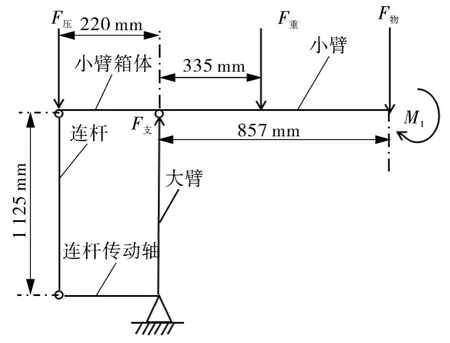
圖3 食品搬運機器人結構受力簡圖Fig.3 Structural stress diagram of food handling robot
根據(jù)材料力學中力和力矩平衡公式可得以下方程:
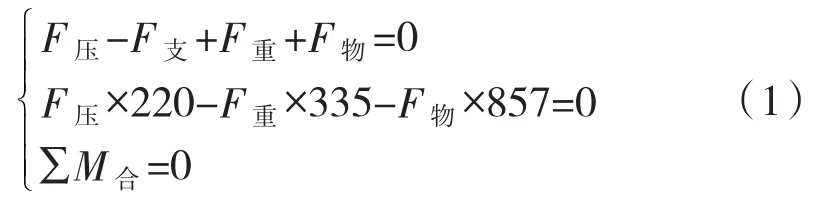
將已知條件代入式(1)可求出相關未知量,大臂所承受的支撐力為6 656.8 N,小臂箱體左端的壓力為5 050.8 N。此時,可將小臂箱體左端壓力分解為施加在小臂左端的力和力矩。機器人小臂結構的受力簡圖如圖4所示,其中力矩M2的大小為2 272.9 N·m。
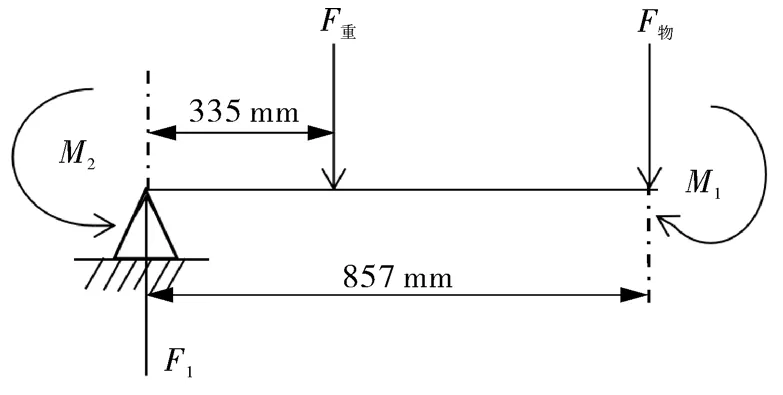
圖4 受力簡圖Fig.4 Force diagram
2.4 應力與應變求解
由上述對小臂的載荷分析和受力情況,在ANSYS Workbench中輸入相關載荷及位移約束,并進行結果后處理[8]。總的變形云圖和von-Mises應力分布云圖分別如圖5和圖6所示。

圖5 小臂總變形云圖Fig.5 Total deformation nephogram of forearm

圖6 小臂應力云圖Fig.6 Stress nephogram of forearm
從圖5可知,小臂在承受最大載荷時的總的變形量為0.338 mm,最大變形量發(fā)生在小臂右端與前爪法蘭連接位置。與小臂總長相比,變形量很小,可以滿足食品搬運機器人在工作時的精度要求。從圖6可知,小臂所受應力較小,最大應力為9.68 MPa,主要集中在左端小臂套筒與直徑連接最外側部分,由于硬質鋁合金的屈服強度為125 MPa,所以小臂的強度滿足設計要求。
3 拓撲優(yōu)化
3.1 拓撲優(yōu)化的理論根據(jù)
在數(shù)學模型處理中,一般的優(yōu)化問題可由下式獲得:minV(x)
式中V(x)——目標函數(shù);
ximax,ximin—— 優(yōu)化變量取值的最大值和最小值;
xi——優(yōu)化變量;
i——優(yōu)化變量的數(shù)量;
Gj,Hk——約束函數(shù);
j——不等式約束的數(shù)量;
k——等式約束的數(shù)量。
對于連續(xù)體結構引入柔順度函數(shù)C,C取值越小,結構越穩(wěn)定,剛度越大[9]。函數(shù)C:

式中F——結構載荷;
U——位移量;
K——剛度矩陣;
ui——單元位移矩陣;
ki——單元剛度矩陣。
代入中間密度懲罰模型公式:

式中xi——相對密度;
E0——彈性模量;
p——懲罰因子。
對于插值單元,懲罰后的剛度矩陣k(xi)關系式:

式中k0——密度為1單元剛度矩陣;
f——隱函數(shù)映射關系。
通過式(2)、(3)、(5)聯(lián)立,求出以質量為約束的拓撲優(yōu)化模型公式(6)。
其中,f為各參量間的隱函數(shù)關系,M(xi)為最終優(yōu)化的質量,M0為原始質量,M*為設定質量允許的最大值,mi為單元質量,gj為可能存在的不等式約束,hk為可能存在的等式約束,ximax,ximin指相對密度的上下限。
由上述理論基礎,在ANSYS Workbench中選擇拓撲優(yōu)化分析,優(yōu)化分析流程如圖7所示,優(yōu)化空間的選取結合實際情況選擇應力較低且在設計中便于裝配調試的區(qū)域。

圖7 拓撲優(yōu)化流程圖Fig.7 Topology optimization flow chart
3.2 小臂的拓撲優(yōu)化
小臂在整體連接時大部分為實體材料,結構存在很大的優(yōu)化空間。利用ANSYS Workbench軟件自帶的形狀優(yōu)化模塊功能,基于前面的靜態(tài)分析,原有的網格劃分設置和受力情況不變,在形狀優(yōu)化模型求解中,設置小臂的質量減少20%為優(yōu)化目標[10]。完成分析計算后可以得到滿足初始條件的優(yōu)化結果圖8,圖中淺色部分為不建議去除部分,深色部分為建議去除部分。建議去除部分主要分布在2個地方,一為小臂的兩側及中心軸處,一為小臂套筒右端圓角處。其中,沿水平方向的小臂兩側邊的深色部分全長分布,其他方向分布很少。

圖8 優(yōu)化結果Fig.8 Optimization results
綜合考慮小臂的實際使用情況和形狀優(yōu)化結果,小臂套筒右端圓角及附屬零部件和小臂圓軸中心處可以考慮減重。經多次反復計算分析,可將小臂套筒圓角設定為35 mm,小臂中心軸切除直徑值為80 mm,優(yōu)化后的小臂模型如圖9所示。對重構后的小臂模型再次靜態(tài)分析,可求得總變形云圖和應力云圖分別如圖10和圖11所示。
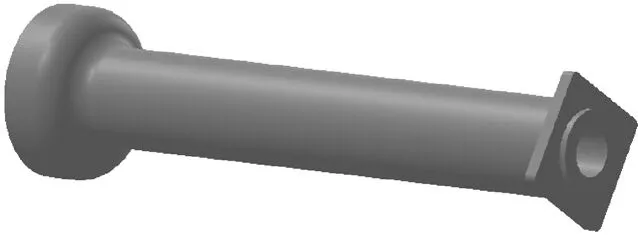
圖9 優(yōu)化后的小臂模型Fig.9 Optimized forearm model
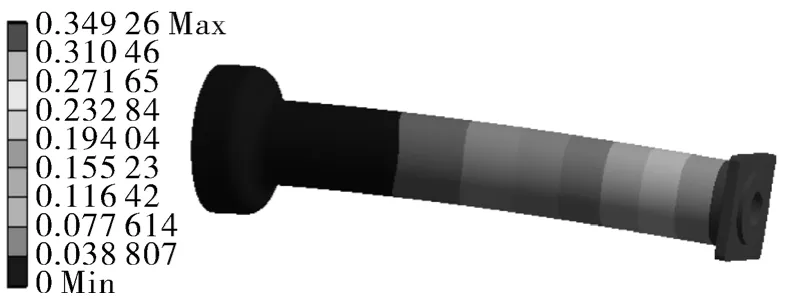
圖10 優(yōu)化后總變形云圖Fig.10 Total deformation nephogram after optimization
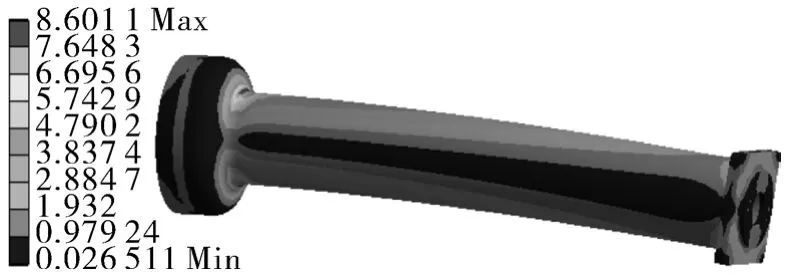
圖11 優(yōu)化后應力云圖Fig.11 Stress nephogram after optimization
優(yōu)化前后的結果對比如表1所示,對優(yōu)化后的小臂進行分析,可以得出以下結論:從圖10可知,小臂的最大變形量仍然很小,為0.349 mm,與優(yōu)化前0.338 mm相比變化率增加了約3.2%,位移變形量不大,能夠滿足機器人作業(yè)要求;從圖11可知小臂的最大應力值為8.60 MPa,遠低于硬質鋁合金材料屈服強度125 MPa,與優(yōu)化前9.68 MPa相比減少了約11.2%,有充足的安全余量;在剛度和強度均滿足于設計要求條件下,小臂質量由原來的51.8 kg減少為現(xiàn)在的41.6 kg,減輕原有質量的約19.7%,達到了輕量化的設計要求。綜合分析可知,除小臂位移量發(fā)生較小增加外,最大應力和質量均有較大的減少,優(yōu)化后的整體結構滿足設計性能要求。
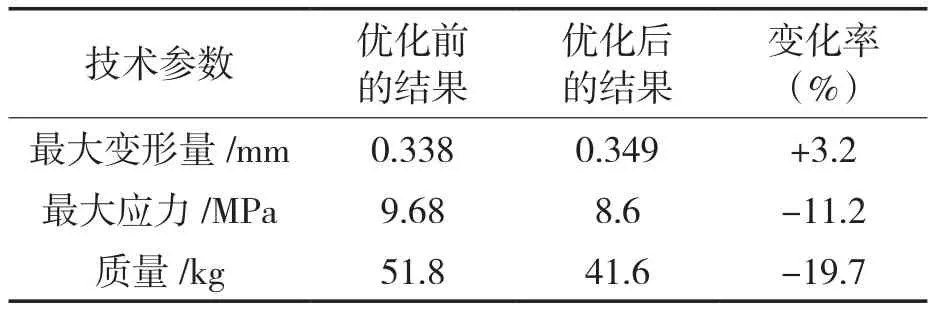
表1 小臂優(yōu)化前后的性能對比Tab.1 Performance comparison of forearm before and after optimization
4 結語
以食品搬運機器人小臂為主要研究對象,對小臂進行研究,建立機器人的三維模型,確立其危險工況時小臂的受力情況。通過ANSYS Workbench對小臂進行靜力學分析和拓撲優(yōu)化,獲得相關分析數(shù)據(jù)。以實現(xiàn)機器人小臂的輕量化為目標,結合拓撲優(yōu)化分析和實際制造工藝及加工裝配的影響,對小臂結構進行優(yōu)化。結果表明:經過輕量化設計后,小臂的質量減輕了19.7%,與此同時,小臂的剛度得到提升,小臂的強度在合理的變形量內。該優(yōu)化方法為食品搬運機器人同類其它產品和相關結構的設計提供理論參考,為其他結構的優(yōu)化設計提供相關經驗。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36