基于UWB和視覺信息的吊裝作業安全管控系統
2021-11-06 05:36:28何勇軍羅榮鈞尹習偉劉英男
儀表技術與傳感器 2021年10期
張 斌,何勇軍,程 劍,羅榮鈞,王 欽,尹習偉,劉英男
(1.國網山東省電力公司建設公司,山東濟南 250001;2.國網山東省電力公司,山東濟南,250001;3.山東大學電氣工程學院,山東濟南 250061)
0 引言
近幾年電力施工吊車作業隊伍和工程量不斷擴大[1-3]。吊車司機很難根據肉眼目測來判斷吊車臂與帶電設備間距離,往往因距離較近而未及時停止吊車臂而引發人身安全和大范圍停電事故,國內外公司已研制相關的吊車防碰撞系統并應用于實際工程[4]:法國SMIE公司采用仿真建模技術還原吊車施工現場,吊車操作者可實時觀察吊車動態;德國西門子公司利用超聲波技術測量吊車與障礙物距離,采用碰撞預警算法實現吊車防碰撞;美國CRANE公司采用無線監視系統預防吊車碰撞。上述系統結構復雜、成本較高、兼容性較差,無法適用于特高壓變電站吊裝作業場景。文獻[5-8]提出測量工頻電場進行安全距離預警的方法,特高壓變電站電力設備所發出的工頻電場是一種頻率為50 Hz的交變準靜態電場,在實際應用過程中,工頻電場測量結果受到運行工況和多設備產生電場疊加影響,導致測量結果不準確,產生誤報漏報。UWB(ultra wide band)超寬帶測距技術廣泛應用在室內定位,而在特高壓變電站設備密集遮擋嚴重的室外場合,會導致UWB信號穿透力不足,大大降低測距精度[9]。
為解決特高壓變電站建設過程中對吊車吊臂距離探測和工頻電場測量存在誤差的問題,本文基于UWB和視覺信息,設計了一種特高壓變電站吊裝作業安全預警系統,實時采集吊車和吊臂位置,實現吊車作業過程中的全方位安全管控。
1 總體方案
基于UWB和視覺信息的吊裝作業安全管控系統架構如圖1所示,系統由現場探測單元和站級管控系統組成。現場探測單元包括視覺探測模塊、UWB定位標簽、UWB定位基站,其中視覺探測模塊采用雙目立體攝像機,采集的吊車圖像通過WiFi網橋傳輸至站級管控系統;UWB定位標簽包括UWB模塊DWM1000、控制芯片STM32F411CE和WiFi網橋,負責吊車吊臂距離探測和上傳;UWB定位基站包括UWB模塊DWM1000和控制芯片STM32F411CE,負責提供位置基準和發射UWB信號。站級管控系統由WiFi基站和站級服務器組成,現場探測單元采集的UWB定位信息和吊車視覺信息通過WiFi信號傳輸至站站級服務器,站級服務器搭載變電站設備3D模型,根據變電站設備3D模型計算吊車位置和吊臂位置,并計算吊臂與帶電設備之間距離。
2 硬件設計
本系統主要設計了UWB定位標簽和基站的硬件電路,主要包括STM32F411CE硬件最小系統、UWB定位芯片DWM1000硬件最小系統、供電電路等3個部分。
2.1 STM32F411CE硬件最小系統設計
STM32F411CE是一款基于Cortex-M4內核的CPU,擁有512K字節的片內ROM存儲器,128 K字節的RAM存儲器,最高工作頻率100 MHz,1個SDIO接口,可以實現與802.11b網絡協議的WiFi設備進行通信。其硬件最小系統如圖2所示。
2.2 UWB定位芯片DWM1000硬件最小系統
本文采用Decawave公司所生產的射頻收發芯片DWM1000作為核心,在此基礎上設計UWB基站和移動標簽的電路。DWM1000與STM32F411CE通過SPI接口通信。DWM1000硬件最小系統如圖3所示。
2.3 供電電路
本系統采用鋰電池供電,鋰電池輸出接入SP6205電源轉換芯片,電源電路如圖4所示。SP6205是200 kHz固定開關頻率PWM直流降壓轉換器,轉換器輸入電壓在5~80 V范圍內,輸出0.5 A連續電流,內建頻率補償和固定頻率振蕩器。PWM控制電路可以將占空比從0~100%線性調整。具有EN功能,過流保護功能,在輸出短路保護情況下,開關頻率可從200 kHz降至45 kHz,保證電源系統的工作穩定性。
3 基于UWB和視覺信息的位置計算
特高壓變電站現場設備多、體積大,不易安裝UWB定位基站,本文將定位基站和標簽安裝在吊車上,結合視覺技術定位吊車位置,并將該位置映射到變電站3D模型中,從而獲取實時吊裝設備空間坐標和帶電設備之間的距離。
3.1 UWB測距計算
根據汽車吊的設置,UWB的3個定位基站分別部署在汽車駕駛室左右兩側以及吊車駕駛室的前方固定位置,3個基站距離地面高度一致均為h1,標簽強磁吸附在吊鉤上,部署方式如圖5所示。
其中,以定位基站A為坐標原點,標簽i映射到基站平面坐標系的坐標為(xi,yi),基站A坐標為(0,0)、基站B坐標為(0,yB)、基站C坐標為(xc,0)標簽到基站坐標平面高度為h。
dA2=xi2+yi2+h2
(1)
dB2=xi2+(yB-yi)2+h2
(2)
dC2=(xC-xi)2+yi2+h2
(3)
由式(1)~式(3)求解標簽i的坐標(xi,yi)及標簽所處高度h。
3.2 基于視覺位置的吊車位置計算
在特高壓變電站,固定安裝視覺探測模塊,監控范圍覆蓋整個變電站。當吊車進入并停止在施工區域,雙目攝像頭開始采集吊車圖像,兩個攝像頭位置不同,吊車目標點的采集的左右圖像中的成像點必然存在一定的像素差,即視差[9]。根據相似三角形測距原理,即可由算法提取對應點視差值計算吊車對雙目相機的深度距離。
如圖6所示,雙目攝像機左右光軸互相平行,成像平面處于同一平面上,光心到成像平面距離即攝像機的焦距為d1,左右光心之間平移距離為兩攝像機之間的極限距離d2,空間中吊車目標投影到左右相平面成像點上,d3和d4分別是吊機投影到左右像平面成像點和成像平面主點之間距離,d是吊機到雙目攝像機之間的距離,由距離可獲取吊車坐標,并將該坐標錄入到變電站3D模型中。
由參考文獻[10]可得d的計算公式:
(4)
3.3 預警計算
吊車在吊裝作業過程中,會不斷移動,本文采用碰撞時間(time to collision,TTC)作為吊車吊裝作業安全的評估指標[10-13]。根據連續2個時刻內標簽相對位置的變化計算出吊車吊臂移動速度v,通過測出的距離值,計算得到TTC值來評估吊車與帶電設備的碰撞風險。
吊車運動過程中,會有水平方向和垂直方向碰撞帶電設備的風險,分別計算水平方向和垂直方向TTC,標簽由A移動到B點軌跡如圖8所示,計算公式如式(5)所示。
(5)
式中:v為吊車運動速度;Δt為連續2時刻間的時間間隔,即檢測系統更新吊車位置的時間間隔;θ為吊車運動速度方向與水平方向間的夾角;d水平、d垂直為吊車標簽距離水平方向和垂直方向帶電設備的間距。
當計算出的水平和垂直TTC值達到安全閾值時,判定此時吊車超越安全距離,有觸電風險。
為了將UWB定位及視覺檢測吊車位置相融合,建立世界坐標系,將UWB定位結果與視覺檢測的吊車位置分別轉換到世界坐標系中,如圖9所示,設置主控樓為世界坐標系原點,攝像頭在世界坐標系位置已知,通過視覺技術獲取吊車與攝像頭的距離,可確定吊車處于世界坐標系的具體位置,將UWB測量定位的坐標進行轉換。
4 系統軟件設計
站級服務器獲取吊車吊裝位置,通過實時坐標轉換,站級服務器根據3D設備模型各個帶電設備位置坐標,計算吊裝設備距離帶電設備之間的水平和垂直方向距離,計算水平和垂直方向的碰撞時間,判斷TTC是否達到安全閾值,超過閾值進行觸電預警,系統流程如圖10所示。
5 系統測試
本系統應用在某1 000 kV特高壓變電站,吊裝標簽安裝位置如圖11所示,攝像頭拍攝吊車圖像如圖12所示。
DWM1000測距理論精度小于5 cm,測距范圍100 m。攝像機采用雙目立體攝像機,鏡頭焦距4 mm,兩鏡頭距離160 mm,測距范圍50 m。現場測試誤差結果如表1和表2所示。
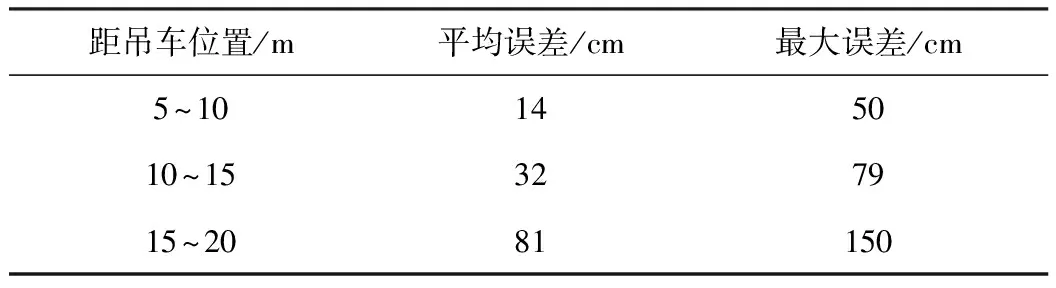
表1 視覺測距誤差
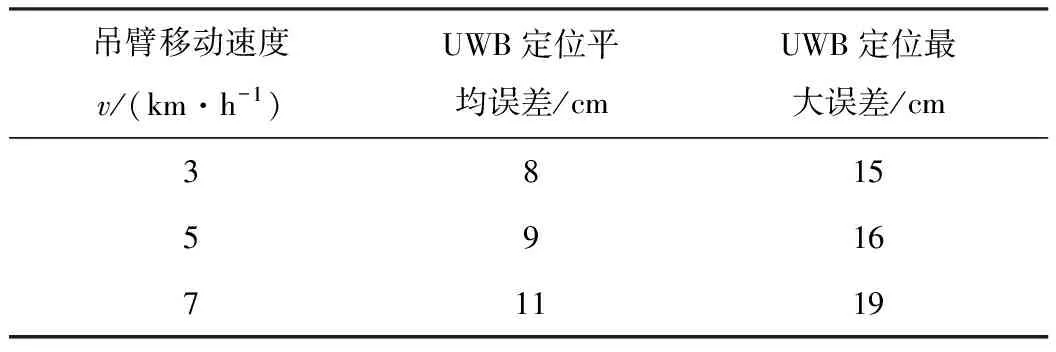
表2 UWB定位誤差
根據測量結果可知:
(1)在雙目攝像頭距離吊車20 m以內,測距平均誤差在81 cm以內,滿足吊車定位精度;
(2)在吊車移動速度小于7 m/h時,UWB測距平均誤差11 cm以內,滿足吊裝定位精度要求。
在1 000 kV主變區域吊裝時,當吊裝設備移動在1 000 kV避雷器周圍時,超過碰撞時間閾值,吊裝預警,預警結果如圖13所示。
6 結束語
開發了一種融合UWB和視覺信息的特高壓變電站吊裝作業安全預警系統。現場應用結果表明,本系統能夠用來檢測吊車所處變電站位置和吊裝位置,并提高吊車吊裝碰撞預警系統的可靠性。UWB定位技術廣泛應用在室內定位,本文將UWB基站和標簽與吊車車身結合,減少了變電站設備遮擋,提高了UWB測距精度和可移植性,為UWB技術在電力安全生產應用中提供了一種新的思路。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
河南電力(2015年5期)2015-06-08 06:01:45
設備管理與維修(2015年12期)2015-04-09 06:57:00
水電站機電技術(2014年1期)2014-09-26 11:59:53
