可折疊旋翼飛行器設計與試驗研究
2021-11-08 02:16:24王守太郝永平邱勇軍有德義羊進
無人機 2021年7期
關鍵詞:設計
王守太,郝永平,邱勇軍,有德義,羊進
1.沈陽理工大學
2.湖南洪源遠大科技有限公司
針對旋翼飛行器續航時間短,結構外形不便于隨身攜帶等問題,通過分析旋翼飛行器結構特點和飛行原理對其進行了優化設計,提出一種基于單兵榴彈的四旋翼飛行器,將機翼折疊之后與榴彈結合呈圓筒狀放入發射器,通過筒壁對折疊機構限位,在沖擊載荷的推動下迅速到達特定區域進行指定的工作。本文給出了結構設計及飛行控制方案,進行了三維仿真建模和強度校核,最后做了實物模型制作和實驗測試。實驗表明,該飛行器實現可折疊功能,能夠穩定懸停定高飛行,避免了浪費過多動力,大大延長了有效工作時間,同時節省攜帶空間,達到了良好的效果。
微型旋翼飛行器在發射之后,能夠實現自主飛行或者遙控飛行,具有帶負載能力強、體積小、飛行穩定、控制特性簡單、執行任務時隱蔽性強的特點,它能夠幫助士兵在戰場上偵察近距離、復雜地形環境下的軍情。除此之外,還可以用作特殊情況下部隊之間的通信聯系工具,甚至還能裝上彈藥直接用作攻擊性武器,實行單兵作戰進行目標識別和打擊。為了能夠增加續航時間,易于隨身攜帶需要做結構優化設計。
飛行原理
對旋翼飛行器的控制問題進行研究,可通過建立旋翼飛行器的系統模型進行。飛行器的飛行原理如圖1所示,具有4個旋翼,其中兩個相對的旋翼順時針旋轉,另外兩個逆時針旋轉,以抵消飛行器的扭矩。電機帶動槳葉產生向上的升力,向上的升力大于自身的重力時,飛機可以向上運動。
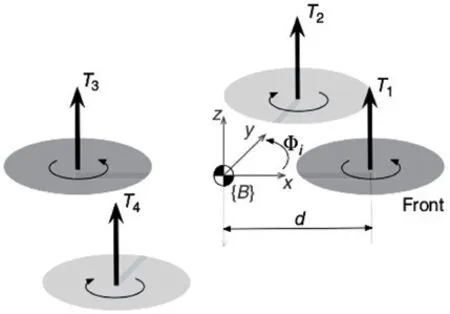
圖1 飛行原理圖。
表1是旋翼飛行器的4個電機相應轉速與旋翼飛行器俯仰、橫滾和偏航等運動形式之間的對應關系。由表可知,想要控制飛行器的運行狀態,必須合理的控制4個電機的轉速。

表1 電機轉速與旋翼飛行器運動形式。
飛行器平臺的硬件系統設計
在機身方面采用碳纖維材料,這是由于碳纖維材料強度高、質量輕,可以最大限度的減小機身自重,而且滿足特殊形狀的加工要求,使無人機具有較高的強度及穩定性。
折疊結構設計
機翼的結構設計要求:
(1)滿足關鍵零件的精度要求,獲得精確的轉動中心位置;滿足關鍵零件的剛度要求,防止打印件塑性變形。
(2)質量輕。微型旋翼飛行器的重量是限制電池尺寸的重要因素,從而影響動力續航能力,所以應盡可能設法減掉多余的材料和質量,從而得到更輕、更高效的飛行動力系統。
(3)結構簡單,裝配容易。不同于普通四軸飛行器的固定機臂,微型折疊飛行器通過在機臂處增加扭簧折疊裝置以達到旋轉機臂的目的。通過扭簧折疊機構控制機臂角度,來達到減小尺寸,達到飛行模式的轉換并促進飛行效率的提升,折疊機構如圖2所示。
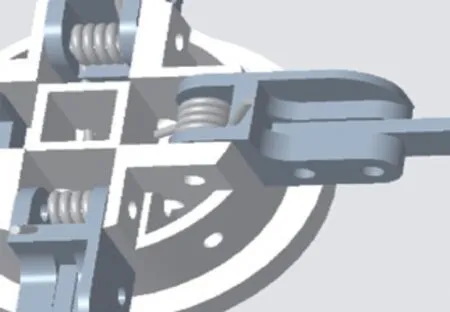
圖2 折疊結構設計。
關鍵結構強度校核
對機臂水平和豎直方向進行力學分析,彎矩圖如圖3所示。
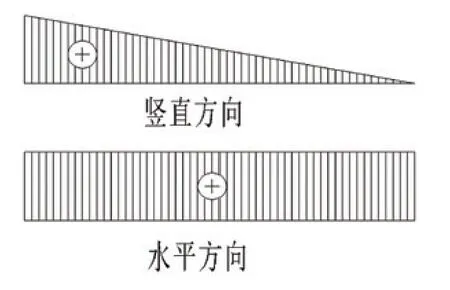
圖3 機臂彎矩圖。
由彎矩圖可知:
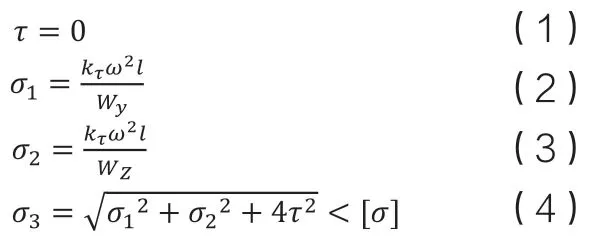
已知6061碳纖維的許用應力[σ]=1000MPa,計算得出σ3=10.45MPa<1000MPa,可以得出強度符合要求。
鎖緊裝置設計
由于微型四旋翼的尺寸限制,分別在旋轉機翼夾和內襯卡槽相互配合的表面上,取相應的機翼展開時的工作位置設計球冠形凸點和凹坑。當轉動機翼臂時,凸起部強力頂開機架內壁,利用塑料機架零件的內壁變形所產生的彈性恢復力實現自鎖功能。
扭簧設計
扭簧依靠扭轉變形給折疊機構提供相應的勢能。扭簧的設計要滿足展開力的要求,并且要保證折疊角度,飛行器機翼的折疊角度定為90°。
在材料的選擇方面,根據工程經驗,扭簧的材料選用高強度鋼。彈性模量E=184GPa,泊松比μ =0.31,σb=2000 MPa。對于規格和尺寸,則根據折疊翼卡槽的外形尺寸,以及需要滿足的扭矩確定扭簧的規格。
電源模塊設計
飛行器的主要動能來源是鋰電池,高聚合物鋰電池能夠高效的滿足電路的需要。本次設計電源模塊電壓為11.2V,電子調速器可以直接從3S鋰電池獲得電源供應,足以提供驅動電機的電壓和電流。而微控制器和其他傳感器,既可以單獨供電也可以通過電子調速器降壓模塊獲取5V電壓,來實現飛控系統的穩定運行,電源冗余設計能夠保證動力持續提供,電壓穩定滿足飛控的需求。
電機驅動設計
選用4500kV無刷電機1303.5配3020螺旋槳,其外轉子轉動,而內部線圈固定,在扭力和轉速等上具有優越的性能,每個電機都需要電調驅動,選用四合一穿越機電調,單個電機最大拉力為180g,總機最大升力為 720g,為了使飛機能有足夠動力進行姿態調整,通常留有 40%的冗余,所以飛行器滿足升力需求。由圖4可見,電機模塊驅動正常,電機槳葉選型合適。
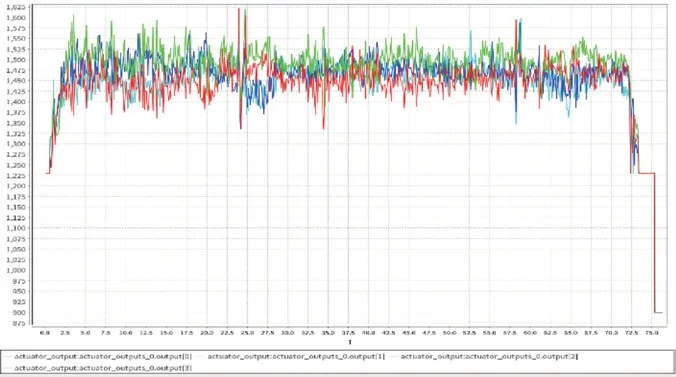
圖4 電機實際與期望的pwm 輸出。
飛行器平臺的軟件系統設計
飛行器平臺軟件設計的總體目的是協調各模塊的正常工作,使旋翼自主飛行器能夠按照既定的方案穩定飛行。經過卡爾曼濾波和融合,使在加速度測量的角度估算當前旋翼飛行器的姿態更加精確。利用經典多級PID控制算法,期望姿態變化轉化為控制器輸出PWM波占空比的變化來控制電機轉速。通過控制電機的加速或減速,保持飛機的平衡和各種姿態變換和運動形式。
飛行控制系統采用STM32F745 處理器作為整個系統的控制核心,首先將有加速度計、陀螺儀和磁力計檢測當前無人機的姿態信號并傳輸給處理器,然后處理器進行信號處理來估計飛行器當前姿態和位置,進而采用一定的控制算法對飛行器進行控制。數字式的輸出量直接轉換成輸出由處理器處理。接收模塊能夠實現遙控器和飛行的實時通信,保證飛行器的飛行路徑和飛行高度。
仿真與測試
針對飛行器軟硬件系統設計合理性,進行了系統仿真、調試與分析。
仿真模型建立
首先,對在三維建模軟件中建立的裝配模型進行相應和必要的簡化,將不存在相對運動的一組零件簡化成單個零件,生成裝配模型后導入 Adams View中添加約束關系、力和力矩、輸入及輸出變量,最終輸出動力學模型文件。可以得到機臂質心展開時,在z軸角速度變化的曲線,如圖5所示。分析z軸角速度變化的曲線,可知機臂展開正常,機構合理,符合設計要求。

圖5 z 軸角速度的變化曲線圖。
地面飛行測試臺的搭建

圖6 飛行測試現場圖。
為了防止因大量參數調整對飛行器進行的損壞,搭建飛行測試臺,通過測試臺實現橫滾、俯仰、偏航的單獨運動或者組合運動,進行PID的調參,最終確定了控制器中參數的最優組合,如表2所示。
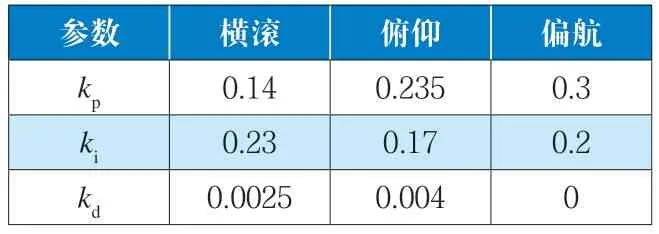
表2 PID 控制參數表。
實際飛行測試中的橫滾俯仰變化可見圖7。分析飛行日志得知,雖然在姿態控制上存在一些震蕩,但是隨著時間的變化,震蕩都是在一定范圍內并且有收斂的趨勢,使姿態控制比較平穩,橫滾、俯仰及加速度的實際輸出值接近期望輸出值,達到了控制無人機姿態的目的。最后在控制程序完成后,基本實現平穩飛行。

圖7 實際與期望橫滾和俯仰姿態變化曲線。
總結
本文設計了一款微型折疊旋翼飛行器,對折疊機構、飛控系統、動力系統的原理和結構方案進行了闡述與設計,分析了實際過程中可能遇到的問題并提出了相應的解決方法,對各個模塊進行調試及調整使得旋翼飛行器能夠正常工作,最后將各個模塊整合與協調使飛行器基本達到了良好的懸停狀態,對無人機技術的發展與國產化有很好的借鑒價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
