無人機空中發射與回收技術分析
2021-11-08 03:20:42崔巍張悅鄭鵬李思梁楊麗英何玉慶
無人機 2021年3期
關鍵詞:示意圖
崔巍,張悅,鄭鵬,李思梁,楊麗英,何玉慶
1.沈陽工業大學
2.中國科學院沈陽自動化研究所
3.機器人學國家重點實驗室
隨著無人機應用領域不斷擴大,無人機空中發射與回收技術成為熱點,本文列舉國內外典型無人機空中發射與回收技術,闡述其特點及優缺點,對當前空基發射與回收關鍵技術進行分析,并展望未來發展趨勢,促進無人機領域進一步發展。
隨著無人機技術的發展,無人機在電力巡檢、災難救援、反恐防暴等領域應用愈加廣泛。在實際應用中,為解決跨地域、長航時、大范圍搜索以及作戰生存力等諸多問題,可以利用大型載機為平臺,搭載若干子機,發揮互補優勢,在一定程度上能解決后勤補給和續航能力不足等問題,且不易受地形約束,擴大作戰半徑。無人機的空中發射和回收作為應用的重要環節,對其機動性、重復使用性、整體輕量化等指標有直接要求。因此國內外學者通過將母機平臺與釋放回收技術相結合,研究出一系列典型空中發射回收技術。
無人機空中發射技術
繩鉤釋放
早在20世紀初,美國海軍就利用飛艇通過人工掛鉤方式,實現空中釋放“雀鷹”無人機。被回收的子機“雀鷹”由當時典型偵察機改裝而成,如圖1所示。通過在“雀鷹”機翼上方靠近重心的位置,安裝一套帶鉤的懸掛架,與母艇腹部的繩鉤鐵環相連,母艇釋放無人機之前,鉤環處于鎖死狀態,“雀鷹”通過懸掛架后方的斜桿保持機體穩定。釋放時,先由懸掛架將“雀鷹”置于母艇之外的風場滑流區,隨后啟動母艇發動機,待“雀鷹”上的掛鉤從懸掛架末端橫杠滑出,母艇內飛行員稍加油門,“雀鷹”即被釋放轉入飛行模式。但“雀鷹”的釋放操作繁瑣,大部分依賴于人工。
載機投放
載機投放是將子機搭載于其他飛行器機腹或機翼下方,運載平臺先以正常速度飛行,投放時,打開機艙或松開鎖掛裝置,空中投放無人機。
美國動力(Dynetics)公司“小精靈”項目第二階段試驗采用了固定翼載機投放方式。此項目以C-130運輸機為載機,“小精靈”無人機被掛載于其機翼下方,得到投放指令后,C-130松開機翼下方鎖掛裝置,“小精靈”依靠自身重力與母機分離,整個過程類似空中投彈。美國“捕食者”和“暴風雨”均采用此方式完成“西卡德”無人機投放。
另一種載機投放方式用于多旋翼無人機,最近由美國西點軍校ADDAS項目研制。此裝置由直升機作為載機,阻力傘、泡沫分配箱和F450四旋翼無人機被作為整體投放。如圖2是四旋翼無人機空投裝置示意圖,圖3是四旋翼分配器示意圖:被投放的四旋翼無人機左右轉子之間用兩根鋁桿平行連接,豎直置于自動泡沫分配箱中,分配箱中的機電閂門將其鎖定,并分配至軌道上固定,整個箱體上方懸掛阻力傘。投放前由直升機將箱體連同阻力傘帶往指定高度,收到投放信號后,阻力傘打開,箱門自動開啟,閂門解鎖,四旋翼無人機靠重力從滑道中滑出。

圖2 四旋翼空投裝置示意圖。
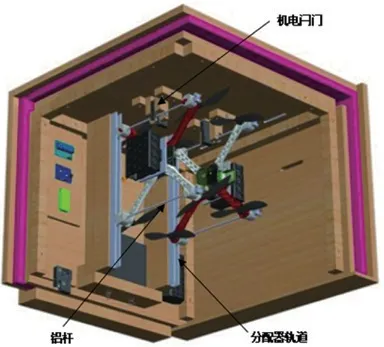
圖3 四旋翼無人機分配器示意圖。
載機投放原理簡單、維護方便,執行速度快,因此可降低從發射到目標區域被攔截的可能。但受風阻及外界環境疊加因素影響,投放時可操縱距離短,對子機控制要求高。
發射管發射
發射管發射主要是以現有戰斗機上的機載干擾彈彈筒作為空中發射平臺,小型無人機折疊后置于干擾彈發射筒中,而后將其彈出的一種發射方式。
美國國防部戰略能力辦公室(SCO)推動發展的“灰山鶉”項目采用了典型固定翼無人機管式發射方式,如圖4所示。“灰山鶉”無人機采用3D打印制造技術,機翼均采用碳纖維復合材料,形狀為風洞試驗確定的最佳氣動布局;選用低阻力凱芙拉纖維作為機身材質。發射前被折疊置于防損壞保護殼內,殼后側裝有阻力傘或減阻飄帶,以確保無人機下降時機頭朝下,金屬保護殼連同無人機被裝載于F-16曳光彈投放器上。發射時,金屬殼體被發射管彈出,降落傘或減阻飄帶展開,隨后與“灰山鶉”無人機分離,最后“灰山鶉”靠尾部螺旋槳及特制機翼穩定飛行。美國海軍研究局(ONR)開展的“蝗蟲”項目和雷神公司發射的“郊狼”均采用管式發射方式。

圖4 “灰山鶉”無人機”在空中被發射。
另一種是多旋翼無人機管式發射項目,由美國國防預研局(DARPA)資助。該項目子機“魷魚”(SQUID)為可折疊式六旋翼無人機,機臂采用中空碳纖維復合材料管,碳管通過被動彈簧負載鉸鏈連接到中心體上,允許旋轉90°,為提高被動彈道穩定性,將鋰聚合物電池置于機頭,從而使氣動中心低于重心。此系統能以中小型直升機為搭載平臺。圖5是“魷魚”彈射發射過程,圖6是“魷魚”結構示意圖。發射前,重量為3.3kg的“魷魚”被折疊置于彈道發射管內,“魷魚”和發射管底座之間,通過一個重量為300g的運載組件將壓縮氣體產生的發射載荷直接傳輸到機架的支撐柱上。其中,發射系統的動力由液體一氧化碳提供,同時運載器底部設有聚乙烯泡沫盤形成的低摩擦密封,以保證最大限度將壓縮氣體的能量轉化為動能。

圖5 “魷魚”彈射發射過程。

圖6 “魷魚”結構示意圖。
此種發射方式可一次性連續發射多架小型無人機,響應速度快、隱蔽性高,具備高度安全性;但子機的設計較為繁瑣,另一方面由于子機尺寸和質量較小,易受風向突變等外界因素影響。
無人機空中回收技術
傘降回收
傘降回收是傘降技術與直升機平臺的有機結合,具有無損、精確等特點。其發展大致分為三個階段。
第一階段是采用不具備滑翔能力的圓形傘降系統作為減阻裝置,曾應用于美國 CH-3“海王”直升機;
第二階段取而代之的是高滑翔比沖壓翼傘;
第三階段是在原有基礎上應用智能掛鉤系統。
現階段空中傘降回收過程如圖7所示。母機平臺配有空中回收裝置,子機裝有主降傘、阻力傘、鉤掛傘、吊索和可旋轉脫落機構。其回收過程是,地面站發出指令,阻力傘首先開啟,發動機隨之停車,當子機下降到一定高度和速度時,回收系統發出控制信號,打開主降傘和鉤掛傘。主降傘首先處于充氣飽和狀態,然后完全放氣,此時主降傘低于鉤掛傘,鉤掛傘下的鉤爪感知到組合繩,完成鉤掛后自動閉合,隨后由母機懸掛帶走。英國“不死鳥”、加拿大CL-89無人機均采用傘降回收。

圖7 空中傘降回收示意圖。
傘降回收適用于各種地形,對操作人員要求不高。但僅限直升機作為母機,當回收中小型無人機時,直升機機身周圍擾流區會對回收過程產生不利影響;再者傘降系統占用一定空間和載荷重量,成本較高,回收率較低。
阻攔網回收
傳統網式回收始于20世紀70年代末,阻攔網架于地面,被回收無人機通過視覺引導系統撞向回收網,撞擊產生的能量一部分由彈性網緩沖,另一部分由網兩側的吸收器吸收。
地面回收技術相對成熟,網式回收逐漸向空中回收轉移。最近有單位提出一種微型無人機網式回收裝置,該裝置以無人載機為捕獲平臺,根據接受信號向空中發射捕捉網,可以捕獲3m以外的微型無人機,如圖8所示,其組成包括捕獲部分、射擊部分、閉鎖部分和觸發部分。為了保證折疊后的網能夠移動到所需位置并展開,捕獲部分設計成邊長為1000mm的正方形尼龍網,四顆彈丸分別位于方形網的四個角;射擊部分為斜彈道中的壓縮彈簧;閉鎖部分由曲柄滑塊或凸輪機構組成,用于彈簧能量儲蓄;觸發部分為一個堅固楔形銷,用作彈簧沿彈道的軸向固定。其工作過程可分為三個階段即壓縮、釋放和重置。閉鎖機構同時壓縮四個斜彈道中的彈簧;然后觸發機構立即快速釋放彈簧,接著子彈由彈簧推動,很快從彈道中彈射出去,同時網被展開并捕獲運動目標;之后彈簧向后移動,重新鎖定。

圖8 阻攔網回收小型四旋翼無人機示意圖。
目前網式回收技術主要依靠精確的末端引導技術,現階段國內外主要有雷達引導、電視跟蹤引導、GPS組合引導和激光引導等先進引導技術。空中網式回收的優點是不受地形和空間約束,但由于回收網面積有限,遇到惡劣風沙天氣易引起捕獲偏離。
機械臂回收
機械臂回收是利用母機平臺上搭載的機械臂回收裝置,將無人機拖入機艙內的一種回收方式,圖9是某型固定翼無人機機械臂回收裝置。回收時控制器發出信號,母機機身下的升降臺升起,將作動桿拉起,從而使機械臂旋轉,與子機機身上的鉸接裝置進行對接。待光學測量設備檢測無誤后,控制器發出指令,升降臺下降,機械臂攜帶子機進入機艙,艙門閉合,回收結束。由美國國防高級研究計劃局發起的“小精靈”項目第三階段試驗,曾采用此種回收方案。

圖9 某型無人機空基機械臂回收裝置結構圖。
機械臂回收較其他回收方式操作原理簡單,不易受氣流變化影響;但其末端抓取效率低,且用于回收的機械臂占用部分載重,更適合采用大型母機平臺。
錐管捕獲式回收
錐管捕獲式回收方式源于空中加油對接,即升壓級翼形助推器與母機在空中實現動態耦合對接,從而將其拖拽至目的地。回收系統由浮標引導裝置和“錐形探針”組成。回收時,在翼形助推器和母機保持協同飛行的前提下,由空氣動力控制面保持尾翼穩定,浮標引導裝置用于引導無人機機頭的翼形助推器,GPS對此過程定位,與大型捕獲機攜帶的錐套浮標引導裝置對準配合,實現空中捕捉并鎖死,隨后由大型捕獲機牽引至回收區域降落。圖10是椎管捕獲對接示意圖,圖11是某種錐套浮標引導裝置結構示意圖。

圖10 錐管捕獲對接示意圖。

圖11 某種浮標引導裝置結構示意圖。
美國國防預研局“小精靈”項目采用了錐管捕獲式回收,“抵消戰略”、“空中集群發射與回收”、“分布式協同作戰”是“小精靈”項目的關鍵任務,如今已完成第三階段測試,其錐管捕獲式回收主要分為三個階段。
第一階段:利用錐管捕獲系統在母機外強烈紊流區實施軟式捕捉;
第二階段:將“小精靈”無人機發動機關閉,以保護母機為前提,利用六自由度機器人在紊流區對其硬抓取;
第三階段:將“小精靈”無人機帶到貨艙內儲存架上。
據美國官方媒體報道,在“小精靈”項目第三階段測試中,由于錐管捕獲系統與“小精靈”無人機僅相差“幾英寸”距離,未能成功對接,美方預計最早于2023年開展第四階段測試,即“功能分解式作戰”。
錐管捕獲式回收中,牽引機與待回收無人機穩定飛行時,相互作用可忽略不計。但其纜繩末端對接處氣動作用形式復雜,穩定性差、難以控制,效率較低。
空中發射與回收關鍵技術
空中精準對接與安全分離技術
空中精準對接技術主要包括無人機高可靠性飛行控制技術、高精準導航和定位技術、視覺引導技術和子母機信息交互技術等。無人機末端引導精度的高低關系著發射回收系統的復雜程度、規模大小及使用的便利性。與此同時,在對接過程中,激烈變化的外界環境嚴重影響精準對接和回收安全性。“小精靈”項目第三階段的失敗即是精準對接技術未達到要求的典型體現。現有末端引導技術包括雷達引導、光電引導、視覺跟蹤引導和GPS組合引導等技術。光電引導又包括激光引導、紅外引導、電視引導和紫外引導等。現階段單一傳感器精度難以滿足精準對接需求,多傳感器與信息融合技術成為發展趨勢。
分離時,機體任務載荷和重心分配不均將產生不穩定影響,另外分離時機身周圍為非定常流,擾流強烈,對回收時的運動和操控產生較大影響。對于高空高速無人機分離,亦伴有熱、光、輻射等問題。針對類似問題,目前常用CFD數值仿真分析方法,模擬分離氣動力矩來評估其穩定性。
智能集群技術
無人機集群作戰模式已成趨勢,相較單架大型無人機,其最大優勢在于,能以較小成本獲得同等價值功能,實現多方位、多元化信息獲取。
一方面,由于集群無人機之間的交互和復雜性,在發射或回收過程中,無人機集群需協同通信、組網、避障、感知、路徑規劃等,因此應發展可靠的集群協同通信技術,高機動性、高魯棒性分布式協同算法;采用集群控制器,使集群完成規模化、有序化飛行;再者要求子機在遇到突發狀況時,可完成故障診斷、自我修復和環境自適應,利用模塊化設計技術,最終實現高度集成化。
變體無人機技術
變體無人機通過改變結構、材料、氣動布局、控制等,從而改變全機構型,以適應不同任務需求。將變體無人機技術應用于無人機的發射回收,有利于空中存儲、發射、回收和適應各種突發環境和場景。
與普通無人機相比,變體無人機技術更加復雜,任務載荷要求更加嚴格;折疊翼無人機的折疊方式、制造工藝、材料選取等都要符合使用要求。對大型固定翼載機,主要通過改變機身相關技術參數,機翼后掠角、展弦比等增加升阻比,或通過機翼和尾翼的組合變形,以適應各種復雜環境。中、小型旋翼機、仿生撲翼機等能實現高效精密任務。
我國相關研究處于起步階段,主要從幾大關鍵技術入手氣動結構一體化技術、抗風阻過載技術、先進材料制造技術、遠程數據傳輸和控制技術。
緩沖吸能技術
無人機空中網式回收依賴于緩沖吸能技術,網式捕捉一方面要保障子機機體和其他部件不受損壞;另一方面要求回收網在滿足快速捕捉的前提下不破損,防止造成無人機二次損壞。
典型的緩沖吸能裝置如渦輪阻尼裝置,其工作原理可以將動能轉化為液體內能貯存起來,達到緩沖效果。現階段有單位已成功采用兩組渦輪阻尼緩沖系統,實現地面回收固定翼無人機,動能吸收率高達95%。
除此之外,使用聚乙烯發泡材料、聚氨酯材料、蜂窩復合材料等優質緩沖吸能材料,探索先進緩沖吸能方式。
低成本制造技術
現有運輸機或偵察機在空中發射或回收智能無人機,實現半自主到完全脫離人工的過渡,節約成本且更加易于維護。采用材料改進、系統替換、目標優化等措施,滿足任務需求的同時,提升平臺整體性能。如CICADA無人機使用3D打印技術制造關鍵或損壞的零部件,大大降低成本,并獲得輕量化空基一體化發射回收平臺。
技術展望
無人機空中分布式作戰已成趨勢,而空基發射回收技術仍不夠成熟,應借鑒國內外現有經驗及科研成果,重點發展以下關鍵技術。
重點發展末端引導技術
現階段單一末端引導技術已不能滿足使用需求,應融合光電、雷達、衛星等技術,以適應新的發展策略。與此同時,無人機結構設計、載體動態特征等都與末端引導技術息息相關,因此從不同角度發展末端引導技術,有利于提高無人機空中對接和捕獲效率。
集群高機動性空基發射回收機構開發
集群作戰規模和抵消戰略不容小覷,空基集群發射和回收技術是集群作戰的基礎。因此有必要開展一體化空中發射回收相關研究,一方面為集群無人機之間提供信息交互、自我修復和后勤支配;另一方面提供高機動性發射回收平臺,提高發射回收效率,使作戰模式多元化;并行發展集群與反集群技術研究,早日實現快速、高機動性智能集群作戰體系。
追求輕量化、高效載機平臺
現階段受無人機動力系統技術限制,續航能力明顯不足。尋求新能源的同時,應從飛機結構材料出發,在保障承載能力的前提下,機身及部件可采用先進復合材料和高強度工程塑料,實現輕量化平臺。另一方面采用高效、優化方法,對無人機外形和尺寸加以優化,合理設計氣動布局、搭載平臺和各分系統的兼容性,發揮其最大效能。■
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
娃娃樂園·3-7歲綜合智能(2016年1期)2016-10-25 09:32:48
中國共青團(2015年7期)2015-12-17 01:24:38
中學生數理化·八年級物理人教版(2014年1期)2015-01-09 08:50:45
中國扶貧(2014年8期)2014-06-27 15:33:39
中國扶貧(2014年8期)2014-06-27 04:09:02
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
能源(2014年3期)2014-03-27 09:55:20
