語音控制自動分類智能垃圾桶設計*
2021-11-08 10:10:58劉磊,潘旭,余坤,林權
科技創(chuàng)新與應用 2021年30期
劉 磊,潘 旭,余 坤,林 權
(武夷學院 機電工程學院,福建 武夷山 354300)
隨著環(huán)境污染日益嚴重,近年來智能垃圾分類裝置研發(fā)一直是業(yè)界學者的研究熱點,普通民眾也都意識到保護環(huán)境的重要性[1-3],國家也相繼出臺了“生活垃圾分類制度實施方案”等法規(guī),全國進入垃圾分類的“強制時代”,各種各樣的智能垃圾桶接踵而來,但目前市場上各種智能垃圾桶普遍存在結構復雜和價格“不親民”等不足[4-6],在此研發(fā)一種新型智能分類垃圾桶,該智能垃圾桶不僅結構簡單,而且制造成本低,能夠滿足廣大家庭用戶的使用需求,市場應用前景好。
1 智能垃圾桶設計原理及結構組成
圖1 為智能分類垃圾桶結構,其中圖1(a)為三維模型展示,圖1(b)為內部結構展示,該垃圾桶分為內、外桶兩個部分,外桶1 安裝設置驅動內桶10 的轉動裝置,轉動裝置主要包括轉盤電機11、中心軸9、轉盤2等,四個內桶10 分別為可回收垃圾桶、有害垃圾桶、濕垃圾桶和干垃圾桶,形狀為扇形,垃圾桶通過語音識別模塊控制垃圾桶的開啟關閉,以及所需內桶的旋轉復位,語音識別控制模塊安裝于垃圾桶蓋4 的內側。
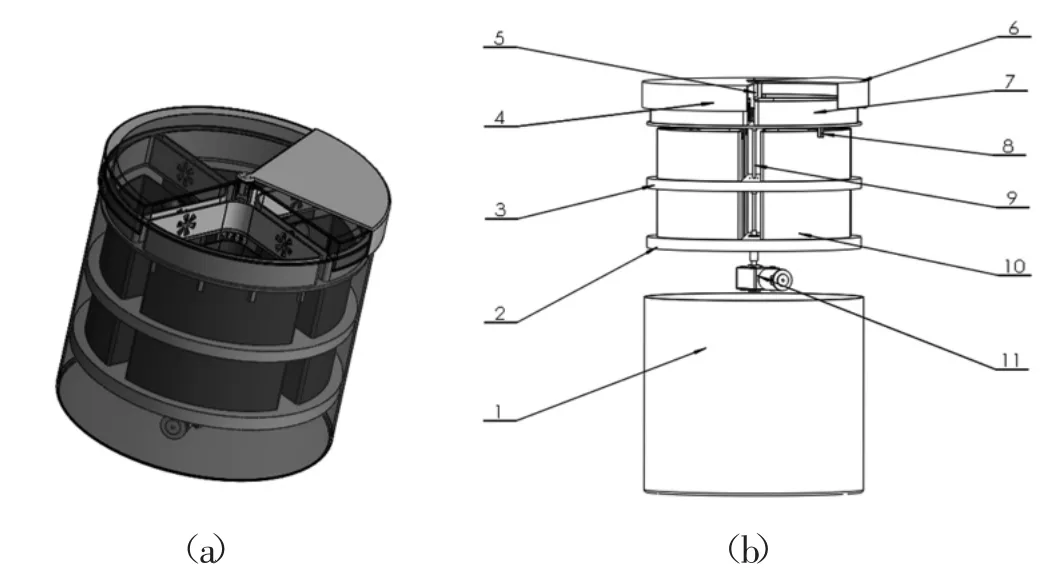
圖1 智能分類垃圾桶結構
智能垃圾桶正常工作中,當投放垃圾時,使用者只要說出垃圾種類,例如“紙盒”,語音識別模塊的聲控接收器接收到語音信號,則驅動轉盤電機11 帶動中心軸9 轉動,同時轉盤2、內桶10、轉架3 和垃圾袋固定盤7跟隨中心軸9 轉動,將“紙盒”相應的內桶旋轉到垃圾桶蓋4 扇形缺口的正下方,隨之轉蓋電機5 帶動垃圾桶轉蓋6 轉動打開垃圾桶,使用者完成投放垃圾。垃圾桶轉蓋6 停留5 秒則自動合上,同時,在垃圾袋固定盤7 和內桶10 空隙中安裝的紅外光電傳感器,能夠隨時監(jiān)測垃圾堆滿的高度,如若垃圾達到規(guī)定高度,則會觸發(fā)蜂鳴器報警,提醒使用者更換垃圾袋,并且垃圾桶轉蓋6 處于常開狀態(tài)。更換垃圾袋完成后,紅外光電傳感器每次間隔兩分鐘檢測一次垃圾堆放狀況,如若垃圾未達到規(guī)定高度,則會驅動垃圾桶轉蓋6 閉合,隨后內桶也會復位轉動到初始位置。
2 智能垃圾桶機械結構設計
2.1 內桶旋轉結構設計
圖2 為內桶旋轉結構,圖中轉盤6、垃圾袋固定盤3 和轉架5 通過法蘭盤聯(lián)軸器4 與中心軸2 連接,中心軸2 通過剛性聯(lián)軸器1 與轉盤電機7 連接,使得轉盤電機7 驅動中心軸2 轉動時,轉盤6、垃圾袋固定盤3 和轉架5 隨之轉動。另外,為了避免中心軸2 在轉動時,出現(xiàn)偏離中心的擺動現(xiàn)象,在中心軸2 的另一端通過軸承9 安裝支撐垃圾桶蓋8 的內側,垃圾桶蓋8 作為固定支撐與外桶固接,實現(xiàn)內桶旋轉結構相對外桶和桶蓋相對運動。
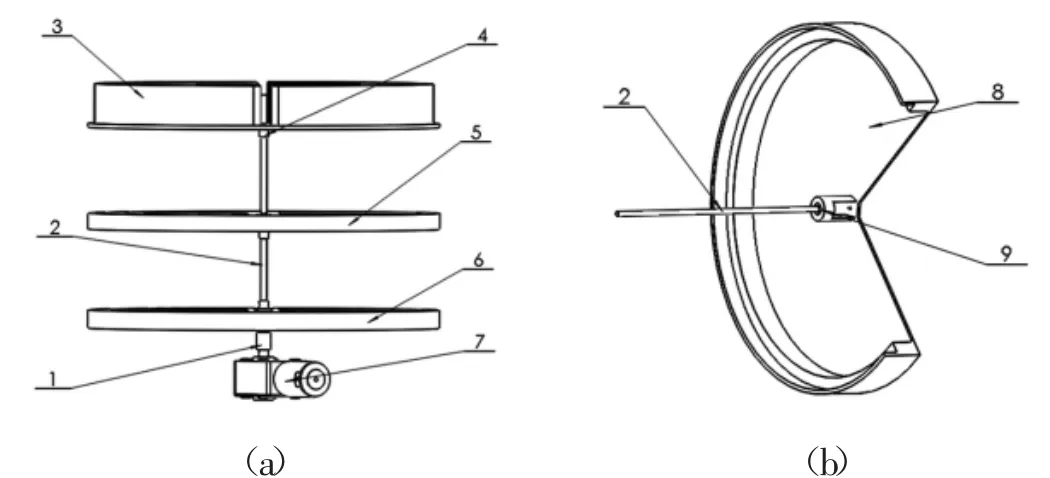
圖2 內桶旋轉結構
圖3(a)為垃圾袋固定盤三維零件模型,垃圾袋固定盤扇形側邊上都設計有類似雪花狀的凹槽,更換垃圾袋時,將垃圾袋塞入雪花槽可以起到固定作用,防止投放垃圾時將垃圾袋扯下。圖3(b)為轉盤三維零件模型,由圖2 可知垃圾內桶放置在轉盤6 的上面,轉盤位于智能垃圾桶底部,不僅支撐著四個垃圾內桶,防止各內桶因為重量不同而發(fā)生傾斜,而且?guī)铀膫€內桶相對外桶同時旋轉。另外,為了避免轉盤旋轉時,內桶發(fā)生位移,因此在轉盤上開設與內桶形狀相似的四個扇形槽,一個內桶定位于一個扇形槽上,且為了轉盤在垃圾桶內定位準確,轉盤設計為球冠形狀。圖3(c)為轉架三維零件模型,轉架為一平板上開設四個扇形通孔的支架結構,扇形孔的形狀尺寸大小與轉盤上的扇形槽一樣,轉架的作用在于避免在內桶旋轉過程中,四個內桶相互之間以及內外桶之間發(fā)生碰撞摩擦,或者發(fā)生干澀內外桶旋轉的現(xiàn)象,同時也對內桶的位置起進一步定位作用。

圖3 固定盤、轉盤與轉架
2.2 開合蓋結構設計
圖4(a)為智能垃圾桶開蓋時的狀態(tài),圖4(b)為閉合時的狀態(tài),需要投放垃圾時,語音識別模塊會根據語音內容,驅動桶蓋電機3 將垃圾桶轉蓋1 順時針旋轉90 度,垃圾桶轉蓋1 將重疊在垃圾桶蓋2 上方,如圖4(a)所示,同時語音識別模塊驅動內桶旋轉機構,將備投垃圾類型的內桶旋轉至圖4(a)中扇形缺口的正下方,完成智能垃圾桶開蓋和轉桶動作。投放結束后,內桶旋轉機構將內桶旋轉復位,同時桶蓋電機3 將驅動垃圾桶轉蓋1 逆時針旋轉90 度,智能垃圾桶恢復合蓋狀態(tài),如圖4(b)所示。該智能垃圾桶采用旋轉式開合蓋結構,不僅需要的工作扭矩比翻轉式開合蓋小,而且垃圾桶轉蓋1 設計面積大于四分之一垃圾桶蓋2 的面積,能有效完整地覆蓋扇形開口,有效防止垃圾異味擴散到環(huán)境中,避免了對家庭環(huán)境的影響。
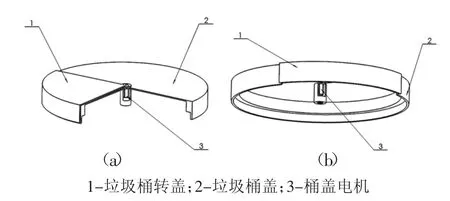
圖4 開蓋合蓋
2.3 垃圾體積檢測結構設計
為了能檢測內桶垃圾堆放狀況,如圖5 垃圾體積檢測結構所示,在垃圾桶蓋缺口的正下方,垃圾袋固定盤2 和內桶1 之間設置紅外光電傳感器,作為體積檢測平面,紅外發(fā)射端3 安裝在垃圾袋固定盤2 上,紅外接收端4 安裝在內桶1 外壁上,當某個內桶垃圾堆放超過體積檢測平面時,光電傳感器發(fā)送信號給控制中心,控制中心則傳遞信號給蜂鳴器,蜂鳴器報警提示使用者更換垃圾袋。
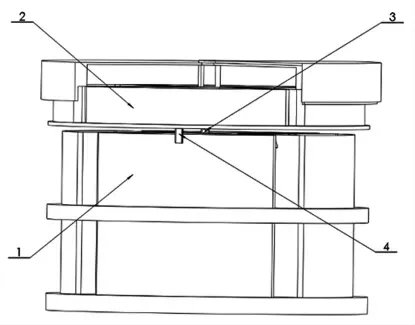
圖5 垃圾體積檢測結構
2.4 內桶結構設計
圖6 為內桶零件三維模型,由于垃圾桶外桶設計為圓柱形,在此基礎上,為了使內桶盡量擁有較大的容量來堆積更多的垃圾,因此將內桶設計成扇形結構,且在內桶兩直角邊設計了兩個向內側凹半圓槽,主要目的是為了清洗時把內桶取出來,可借助兩個半圓槽快速取出,增加智能垃圾桶的使用便捷性。

圖6 內桶零件三維模型
3 智能垃圾桶控制系統(tǒng)設計
3.1 控制系統(tǒng)硬件選擇
本設計采用Arduino UNO R3 為智能分類的系統(tǒng)核心,由紅外光電傳感器、電源電路、驅動模塊、語音模塊構成智能分類控制系統(tǒng),其工作流程如圖7 所示。首先對使用者發(fā)出的語音進行識別判斷,獲知垃圾類別,再驅動相應的內桶旋轉到垃圾投放口,接著垃圾桶蓋旋轉打開,使用者投放垃圾,完成投入垃圾后紅外光電傳感器進行紅外檢測,判別垃圾堆放高度,按需發(fā)出警報提示使用者更換垃圾袋,最后桶蓋旋轉關閉。
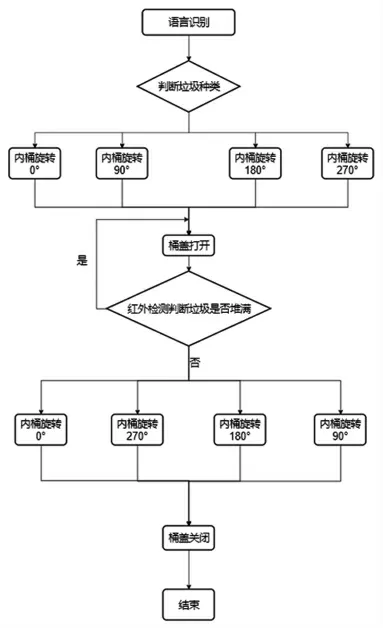
圖7 控制系統(tǒng)工作流程
3.2 主控電路設計
本設計主控電路是采用Arduino UNO R3,以Atmega328P 為基礎的智能語音分類垃圾系統(tǒng),實現(xiàn)垃圾桶的語音識別控制垃圾桶的開啟關閉,電路輸入電壓為外部供電的7V-12V 直流電源輸入,USB 供電電源電壓為5V,電路原理圖如圖8 所示。
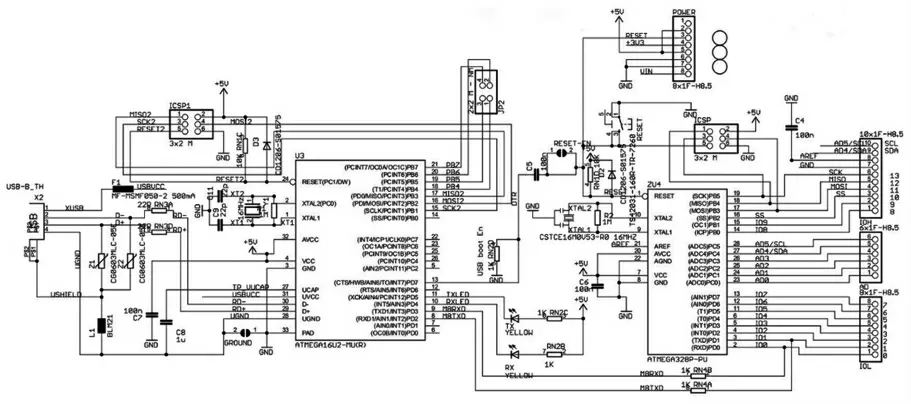
圖8 Arduino UNO R3 電路原理圖
其中電機和蜂鳴器的接線如圖9 所示,兩個電機與Arduino UNO R3 連接,GW600-5 渦輪電機接引腳8,同時外接電源;GA12-N20 電機接引腳9,同時也外接電源;在程序中以低電平驅動,以防單片機驅動時,電機所需的電壓不足。蜂鳴器則連接引腳11,另一引腳連接電源。

圖9 電機和蜂鳴器接線圖
3.3 語音識別模塊設計
本智能垃圾桶LD3320 語音識別模塊由STC11L08XE的主控芯片與LD3320A 的語音識別系統(tǒng)組成,原理圖如圖10 所示,圖10(a)為STC11L08XE 構成主控芯片原理圖,圖10(b)為LD3320A 構成語音識別系統(tǒng)原理圖。該模塊需要5V 電源以保證供電穩(wěn)定,可識別在2.0m 以內的所有普通話,該模塊最多可以識別50 條語音,并可接任意單片機。其中STC11L08XE 的RXD 與主控電路的TXD 即引腳0 相連,TXD 連接RXD 即引腳1,如圖11 所示。
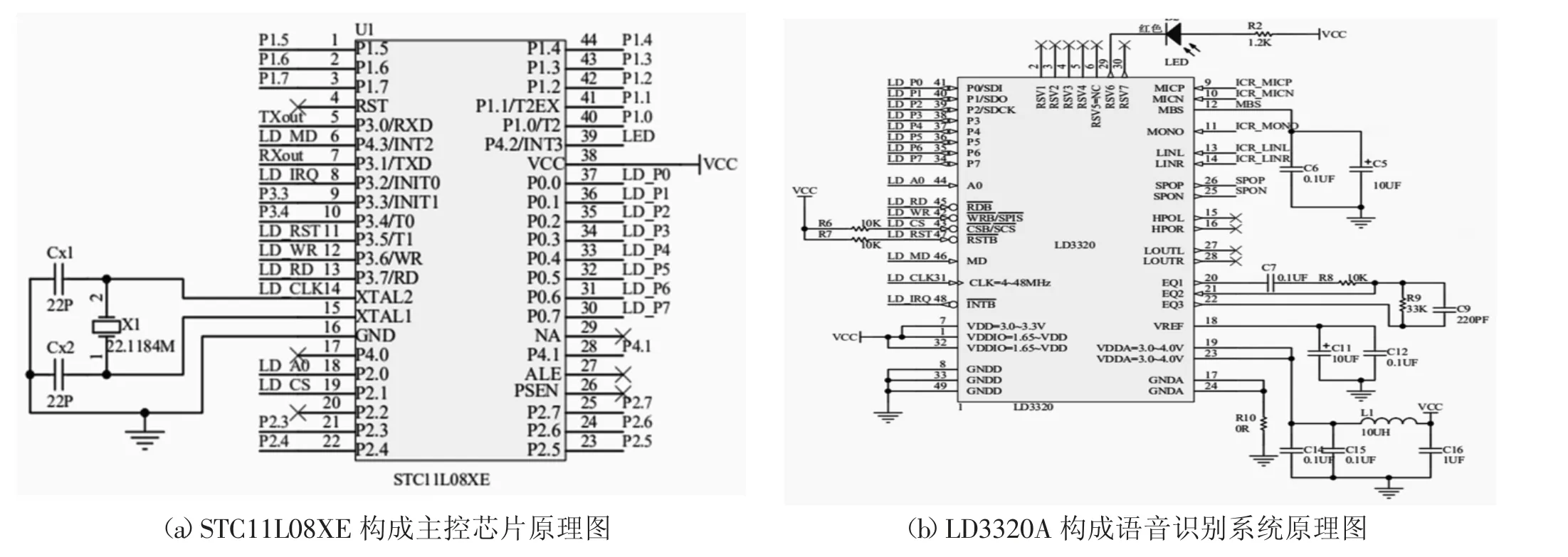
圖10 語音識別模塊電路原理圖
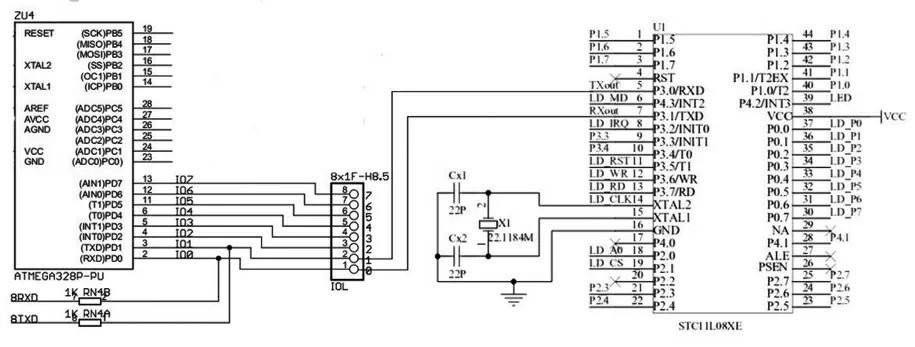
圖11 語音模塊與主控電路接線
3.4 紅外光電傳感器
本智能垃圾桶采用紅外F3 對射式傳感器,可感應2.0-25.0cm 的距離,檢測距離可調節(jié),感應時間為2.0 ms,工作電源為4.5V-5.5V,輸出電流100.0mA,具有靈敏度高、使用壽命長的特點,其電路原理如圖12 所示。圖中顯示,左邊為發(fā)射端,引腳1 連接GND,引腳2 連接VCC;右邊為接收端,引腳1 連接VCC,引腳2 連接Arduino UNO R3 圖9 的引腳10。

圖12 紅外F3 對射式傳感器電路圖
3.5 控制系統(tǒng)程序設計
本智能垃圾桶通過語音識別控制垃圾桶蓋開閉以及垃圾桶內桶旋轉。
首先語音模塊的程序設計,設置四個指令,分別為干垃圾、濕垃圾、可回收垃圾、有害垃圾,如下所示:
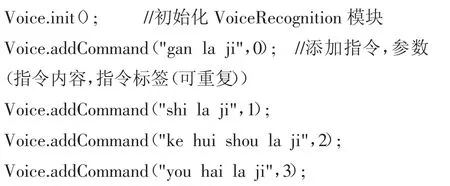
然后是識別后工作程序,以下程序為垃圾桶轉蓋正下方的內桶假設為干垃圾內桶的情況。當語音模塊識別出干垃圾時,內桶不動桶蓋旋轉,投入垃圾后進行紅外檢測,若是檢測到垃圾堆滿則觸發(fā)蜂鳴器,其他保持原狀態(tài)。延時2 分鐘進行再次檢測,如若沒有更換垃圾袋,將一直循環(huán),若是檢測到內桶未滿,垃圾桶蓋就會旋轉關閉。


4 結束語
本項目研發(fā)的新型智能分類垃圾桶主要由內外桶、內桶旋轉結構、開合蓋結構、垃圾體積檢測結構以及控制系統(tǒng)等構成。該垃圾桶通過利用語音識別模塊控制垃圾桶蓋開啟關閉和驅動內桶旋轉復位,實現(xiàn)垃圾分類投放,利用紅外傳感器檢測垃圾的堆放體積,警示更換垃圾袋,內桶分為可回收垃圾、有害垃圾、濕垃圾和干垃圾四類,符合我國的垃圾分類標準,該新型智能垃圾桶,不僅結構簡單制造成本低,而且使用便捷,適合廣大家庭用戶的推廣使用。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32