基于三維激光掃描技術深圳地鐵十號線現狀調查
2021-11-08 08:03:26肖佳軍
陜西水利 2021年10期
肖佳軍
(深圳市水務規(guī)劃設計院股份有限公司,廣東 深圳 518109)
1 引言
地鐵是城市重要的交通運輸工具,但是地鐵運輸速度快、運力強,人員較為密集,一旦出現危險,后果不堪設想[1]。但在城市內部,基礎設施建設跨越地鐵線路的情況較為常見,需要嚴格控制施工質量,以減輕對地鐵工程的影響。但是,在施工前,獲取地鐵現狀,可減少工程施工后的“糾紛”,是十分必要的。隨著科學技術的發(fā)展,三維激光掃描技術不斷發(fā)展,在軌道交通、市政道路、邊坡巖體等工作中取得了較多的應用[2-6]。多項工程實踐工作表明,采用三維激光掃描技術具備精度高、數據處理簡便等優(yōu)勢。深圳市城市化程度高,地鐵里程名列前茅。在基礎設施建設過程中,經常遇到穿越地鐵線路的情況。結合五和河左支污水干支管網跨越地鐵10號線工程,對三維激光掃描技術在地鐵現狀調查中的應用進行研究。
2 工程概況及設備參數
2.1 工程概況
五和河左支污水干支管網完善工程橫跨地鐵10 號線,施工區(qū)域為W33~W42 污水設計管段。監(jiān)測地鐵隧道里程左線樁號DK14+250~DK14+674,總長424 m;右線樁號DK14+250~DK14+588,總長338 m。
為確保地鐵隧道結構安全,在頂管施工前,需進行地鐵隧道結構現狀調查、隧道三維激光掃描等。三維激光掃描長度:左線460 m(DK14+235~DK14+695),右線355 m(DK14+240~DK14+595),共計815m。
2.2 掃描設備
本次掃描采用法國FAROS350 三維移動掃描設備,FARS350 設備具體參數見表1。
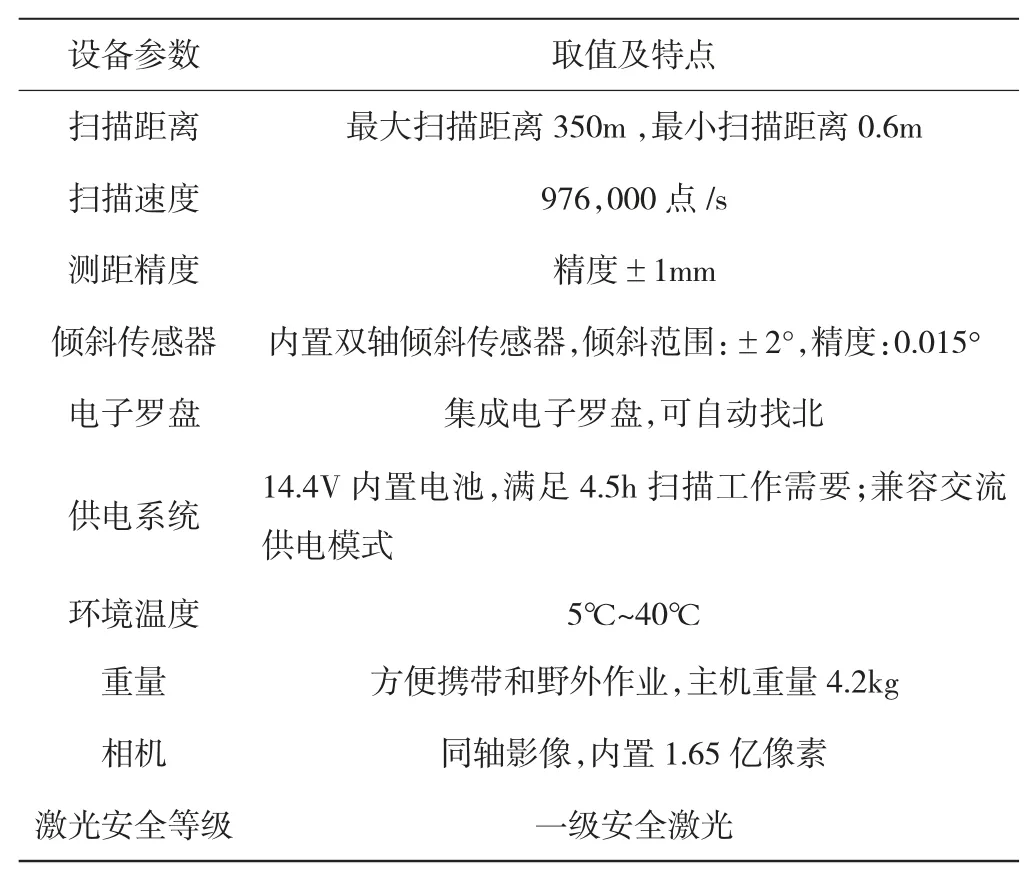
表1 FAROS350 設備參數

圖1 項目位置示意圖
3 三維激光點云外業(yè)數據采集
3.1 儀器擺放與設置
把腳架調到最高,把儀器從儀器箱里取出,然后放在腳架的接口處并擰緊制動開關。儀器要放在軌道中間,確定放置平穩(wěn)后打開儀器開關,一般開機需要1 min~2 min 的時間;當開機完成后,新建項目文件,文件命名為項目開始時間數字(年+月+日),掃描模式設置為室內10 m 以外,平均點間距設置為0.77 cm,掃描時間5 分20 秒。
3.2 標靶的擺設
標靶分為特制球形標志(也稱標靶球)和棱鏡球。放置標靶球時必須注意:標靶球與掃描儀器的距離控制在8 m~10 m 以內,標靶球擺成三角形;如果側邊標靶球無法擺放,則將球放置地面,不能放成等邊三角形;標靶球不能被物體遮擋;不能將標靶放在一條直線上;否則會降低拼接精度;安放位置要確保穩(wěn)定。
3.3 測站設置
每站掃描結束后,在掃描儀液晶屏上瀏覽點云快速視圖,查閱各標靶球是否清晰可見,對于看不清楚的標靶球,必須選擇刪除當前測站,并重新掃描本測站。

圖2 現場觀測示意圖
4 數據處理及結果分析
4.1 數據預處理
內業(yè)數據處理采用的是FARO 自帶的處理軟件SCENE,見圖3。通過標靶球將相鄰兩個掃描站的數據進行拼接,相鄰兩個掃描站的點云拼接精度一般在2 mm 左右。

圖3 SCENE 軟件處理
左線、右線這兩段地鐵掃描點云見圖4。

圖4 點云分布圖
4.2 斷面提取
考慮到站臺段掃描段和通道段掃描段的頭尾兩端的點云密度較為稀疏,因此在提取斷面時,需要從首尾架站處的點云開始截取斷面。具體斷面提取過程如下:
(1)通過3DReshaper 軟件去除隧道中的噪聲點,然后通過軟件及人工處理的方式刪除非隧道的點云,見圖5。
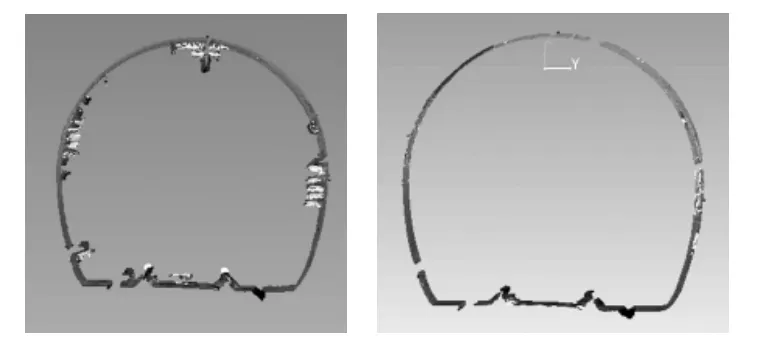
圖5 原始隧道點云與去除噪聲點后的點云
(2)隧道中軸線的提取包括兩個步驟,一是計算隧道整體的全局輔助線,通過人工方式進行繪制;二是借助于全局輔助線,通過軟件自動擬合出一條最佳的隧道中軸線,見圖6。

圖6 隧道點云的中軸線提取
(3)根據《城市軌道交通工程測量規(guī)范》規(guī)定:線路直線、曲線段每6m 和5m 測設一個橫斷面。本項目依據提取的中軸線,每隔5m 提取一個斷面。斷面與中軸線的交點即為斷面的中點,見圖7。

圖7 斷面與中軸線提取
4.3 掃描結果分析
提取各掃描段的斷面及其中心點后,對各掃描段的中心高度值、最大水平寬度值、頂點高度值進行統(tǒng)計。
4.3.1 左線掃描分析
依據三維激光掃描數據,將左線各斷面的中心高度值、水平最大寬度值、頂點高度值,由起點位置開始依次序繪制成圖8,以便直觀的判別各參數在隧道中的變化情況。左線隧道中心高度值在2.1 m~2.3 m 之間,整體稍有起伏;水平最大寬度值為5.4 m,沿線變化不大;頂點高度值在4.6 m~4.8 m 之間,整體較為平緩,變化較小。
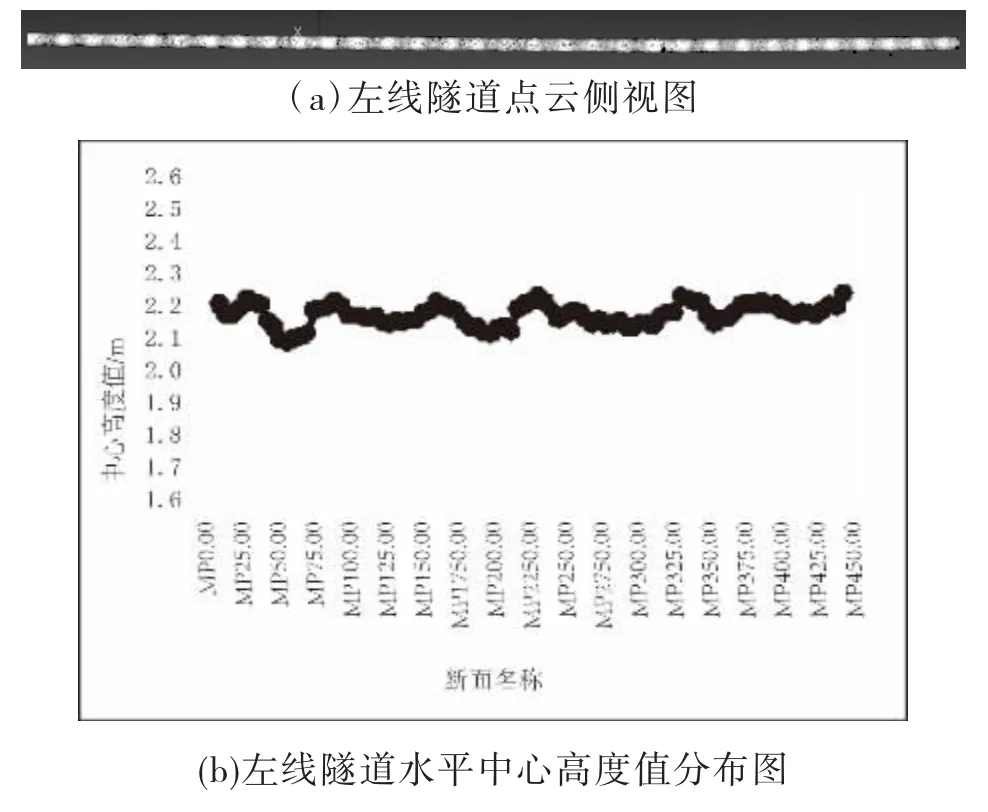

圖8 左線三維激光掃描數據
4.3.2 右線掃描分析
依據三維激光掃描數據,將右線各斷面的中心高度值、水平最大寬度值、頂點高度值繪制成圖9,以便直觀地判別在隧道的變化情況。

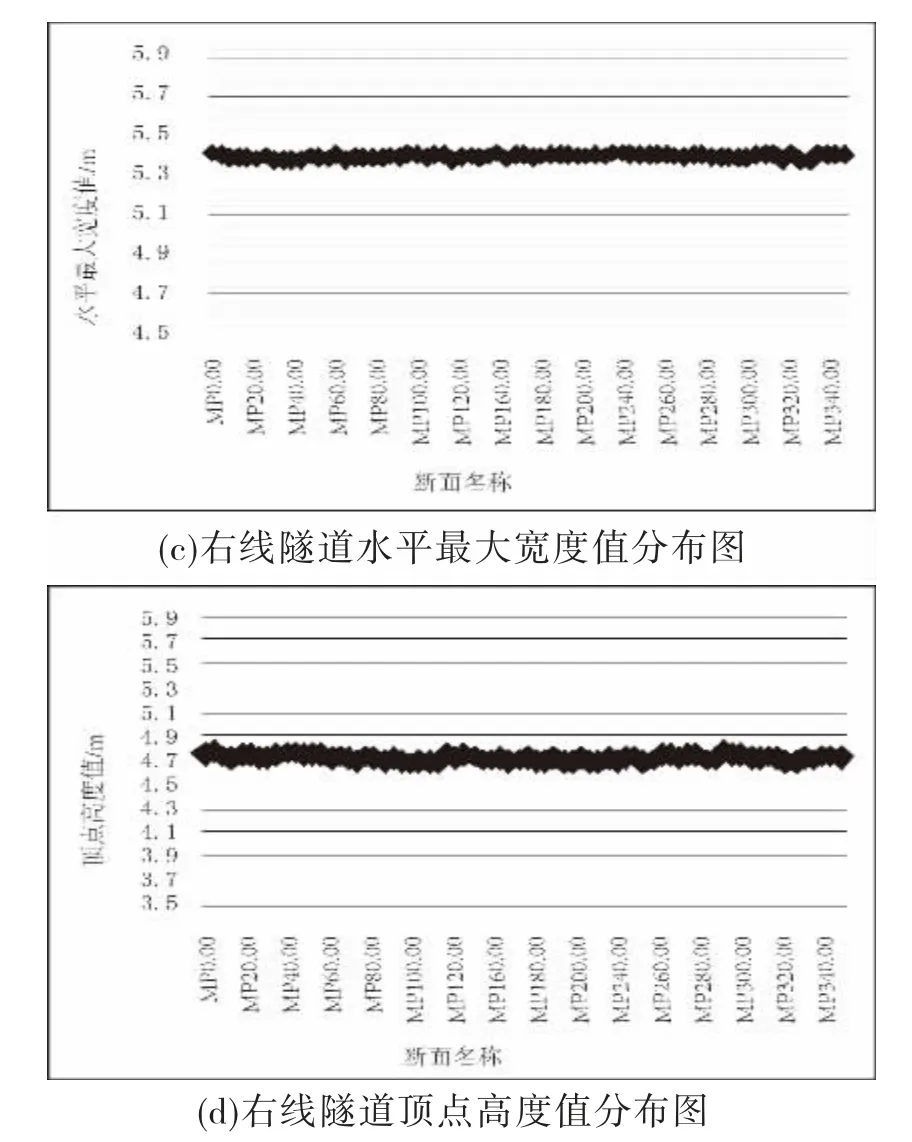
圖9 右線三維激光掃描數據
右線隧道中心高度值在2.1 m~2.3 m 之間,整體稍有起伏;水平最大寬度值為5.4 m,沿線變化不大;頂點高度值在4.7 m左右,整體較為平緩,變化較小。
4.4 三維激光掃描精度檢查
1)SCENE 軟件點云拼接精度檢查,檢查結果表明:相鄰站拼接誤差為2 mm 左右,誤差在規(guī)范允許的范圍以內。
2)隨機選取5 個斷面,使用測距儀對水平最大寬度值,頂點高度值量取,每個值量取2 次,取平均值作為該檢查值,與三維激光掃描原測值進行比對分析。經比對計算,邊長最大差值為0.3 cm,說明斷面測量成果合格,三維激光掃描精度滿足精度要求。
隧道現狀調查利用三維激光掃描儀及人工調研形式進行,在地鐵隧道左線記錄到13 個部位病害影響資料,右線記錄到13 個部位病害影像資料。
5 結論
為了獲取地鐵10 號線現狀,利用架站式三維激光掃描儀獲取地鐵隧道中的點云數據,點云測距精度為毫米級。借助于標靶球對各相鄰掃描站之間的拼接精度為毫米級。使用FARO自帶的點云處理軟件,對點云每隔5 m 提取一個斷面,從而獲取了整個掃描區(qū)域的輪廓形態(tài),數據成果滿足相關要求。三維激光掃描結果表明:深圳地鐵10 號線調查段整體情況良好,部分區(qū)域存在修補、濕跡等病害現象。
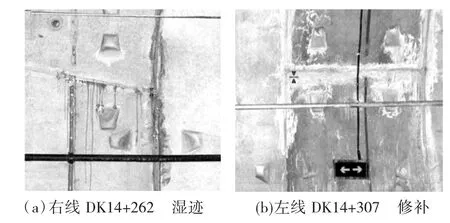
圖10 部分病害影像資料
