不確定環(huán)境下多式聯(lián)運(yùn)路徑多目標(biāo)優(yōu)化
2021-11-09 00:48:16肖云鵬羅義娟
重慶交通大學(xué)學(xué)報(bào)(自然科學(xué)版) 2021年10期
彭 勇,肖云鵬,羅義娟
(重慶交通大學(xué) 交通運(yùn)輸學(xué)院,重慶 400074)
0 引 言
多式聯(lián)運(yùn)是目前最重要的運(yùn)輸組織模式之一,合理的多式聯(lián)運(yùn)路徑?jīng)Q策,將降低運(yùn)輸成本,提高運(yùn)輸效率。決策目標(biāo)是影響多式聯(lián)運(yùn)路徑優(yōu)化的關(guān)鍵因素,常見的優(yōu)化目標(biāo)有最小成本、最短時(shí)間、最小風(fēng)險(xiǎn)、最低碳排放等。但過去單一決策目標(biāo)的研究對運(yùn)輸實(shí)踐的指導(dǎo)意義較小,因真實(shí)情況下決策目標(biāo)通常是不唯一且相悖的[1]。如貨主在運(yùn)輸某些具有強(qiáng)時(shí)效性、高附加值的貨物(輕工、紡織品及服裝、醫(yī)藥制品及鮮活易腐品等)時(shí),通常要求盡快運(yùn)輸交付,但提高運(yùn)輸速度往往意味著運(yùn)輸企業(yè)要支出更多的成本[2]。因此選擇一條能滿足企業(yè)經(jīng)濟(jì)效益追求,同時(shí)能縮短運(yùn)輸時(shí)間的最優(yōu)路徑,對于提升企業(yè)效益與服務(wù)質(zhì)量,增強(qiáng)企業(yè)競爭力具有重要意義。現(xiàn)有研究針對多目標(biāo)多式聯(lián)運(yùn)問題的解決方法有權(quán)重法[3],目標(biāo)轉(zhuǎn)換為約束[4],Pareto解[5]等,真實(shí)情況下權(quán)重法中不同目標(biāo)權(quán)重的確定非常困難,目標(biāo)轉(zhuǎn)換為約束后增加了算法復(fù)雜度且求解質(zhì)量不高,而Pareto解能很好處理相悖目標(biāo)之間的表達(dá),而被廣泛應(yīng)用于多目標(biāo)問題的研究中[6]。
此外多式聯(lián)運(yùn)實(shí)踐因受交通、天氣等影響,具有不確定性。現(xiàn)有研究通過隨機(jī)理論[7]、模糊理論[8]或區(qū)間數(shù)[9]來處理多式聯(lián)運(yùn)路徑?jīng)Q策過程中的不確定性。然而忽略了對決策有重要影響的班期[10],當(dāng)問題引入班期后,優(yōu)化目標(biāo)的分布函數(shù)或數(shù)值特征通過以上不確定處理方法求解非常困難[11]。而由電腦進(jìn)行統(tǒng)計(jì)抽樣實(shí)驗(yàn)的蒙特卡洛方法可為各種數(shù)學(xué)問題提供近似解,尤其針對這種太復(fù)雜以至很難分析求解的問題非常有效。
綜上,不確定環(huán)境下多式聯(lián)運(yùn)研究多以單目標(biāo)函數(shù)為主,忽略了現(xiàn)實(shí)情況下決策目標(biāo)的多樣性,且現(xiàn)有研究中涉及的不確定處理方法,都不能有效解決多式聯(lián)運(yùn)路徑?jīng)Q策中有重要影響的班期。故筆者在充分考慮決策人擁有多種互斥目標(biāo)需求的前提下,針對前人鮮有涉及的班期,構(gòu)建不確定環(huán)境下,考慮班期的以最小成本與最短時(shí)間為目標(biāo)的優(yōu)化模型。利用蒙特卡洛方法處理模型中時(shí)間的不確定性,設(shè)計(jì)一種將蒙特卡洛仿真與多目標(biāo)蟻群算法相結(jié)合的混合啟發(fā)式優(yōu)化求解算法,并改進(jìn)蟻群算法的轉(zhuǎn)移策略和信息素更新策略,提高算法求解質(zhì)量。
1 問題描述與建模
1.1 問題描述
圖1所示多式聯(lián)運(yùn)網(wǎng)絡(luò)中,節(jié)點(diǎn)間的貨物運(yùn)輸有多種運(yùn)輸方式供選擇,運(yùn)輸時(shí)間往往因天氣,事故等原因有一定不確定性。不同運(yùn)輸方式在節(jié)點(diǎn)處轉(zhuǎn)運(yùn)將產(chǎn)生轉(zhuǎn)運(yùn)時(shí)間及轉(zhuǎn)運(yùn)費(fèi)用。另外,在多式聯(lián)運(yùn)中,鐵路與水路運(yùn)輸往往按照一定的時(shí)刻表(班期)發(fā)班,貨物難以做到即到即走,而是要等待該運(yùn)輸方式該班發(fā)班時(shí)刻才能出發(fā),本問題考慮節(jié)點(diǎn)處轉(zhuǎn)運(yùn)不同運(yùn)輸方式有其班期限制這一因素。筆者構(gòu)建不確定環(huán)境下運(yùn)輸總成本最小化及運(yùn)輸總時(shí)間最小化的雙目標(biāo)優(yōu)化模型,求起點(diǎn)到終點(diǎn)的最短路徑。
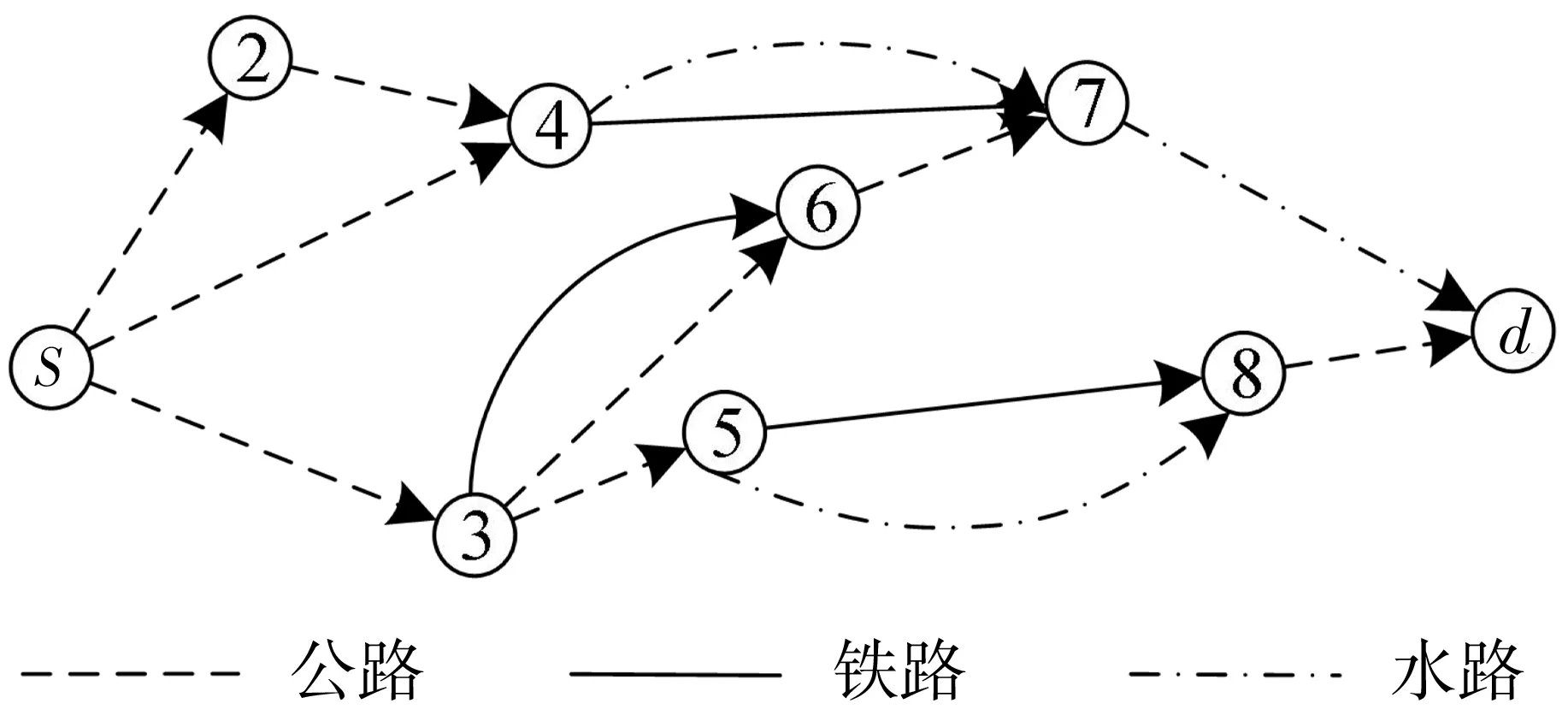
圖1 多式聯(lián)運(yùn)網(wǎng)絡(luò)Fig. 1 Multimodal transport network
1.2 模型假設(shè)
模型假設(shè)如下:①運(yùn)輸貨物單一且不可分割;②不同節(jié)點(diǎn)間單位運(yùn)輸成本已知;③不同節(jié)點(diǎn)間運(yùn)輸時(shí)間隨機(jī)分布已知;④不同運(yùn)輸方式之間的轉(zhuǎn)運(yùn)時(shí)間與成本已知;⑤貨物運(yùn)抵節(jié)點(diǎn)若需轉(zhuǎn)運(yùn),則立即開始裝卸貨物;⑥貨物在完成轉(zhuǎn)運(yùn)后按所選運(yùn)輸方式最近班期開始后一行程運(yùn)輸。
1.3 數(shù)學(xué)模型

目標(biāo)函數(shù)為:
(1)
(2)
(3)
約束條件為:
(4)
(5)
(6)
?m,n∈M
(7)
(8)
(9)
(10)
(11)
(12)

(13)

式(1)為目標(biāo)函數(shù);式(2)為運(yùn)輸總費(fèi)用;式(3)為運(yùn)輸總時(shí)間;式(4)保證路徑第一個(gè)節(jié)點(diǎn)為起點(diǎn);式(5)保證節(jié)點(diǎn)間只選擇一種運(yùn)輸方式;式(6)保證單一節(jié)點(diǎn)最多發(fā)生一次轉(zhuǎn)運(yùn)服務(wù);式(7)保證轉(zhuǎn)運(yùn)之后運(yùn)輸方式存在且連續(xù);式(8)保證路徑最后一個(gè)節(jié)點(diǎn)為終點(diǎn);式(9)保證路徑中每個(gè)節(jié)點(diǎn)的流入邊與流出邊是唯一且連續(xù)的;式(10)為到達(dá)節(jié)點(diǎn)j的時(shí)刻;式(11)為在節(jié)點(diǎn)j完成轉(zhuǎn)運(yùn)的時(shí)間;式(12)為在節(jié)點(diǎn)j等待運(yùn)輸方式m發(fā)車的時(shí)間;式(13)為離開節(jié)點(diǎn)j的時(shí)刻。
2 問題求解
多目標(biāo)多式聯(lián)運(yùn)路徑優(yōu)化問題屬于NP難問題,由M. DORIGO等[12]提出的蟻群算法在最短路徑問題最優(yōu)解質(zhì)量和搜索效率的平衡方面具有較大優(yōu)勢而被廣泛應(yīng)用于解決多目標(biāo)問題。
(14)

2.1 利用蒙特卡洛方法模擬不確定性
蒙特卡羅方法是利用隨機(jī)數(shù)和概率分布處理不確定和確定性問題的方法,通過給定一定數(shù)量的樣本,由優(yōu)化目標(biāo)的樣本平均值估計(jì)優(yōu)化目標(biāo)真實(shí)值,從而求解優(yōu)化問題。且由“強(qiáng)大數(shù)定律”,當(dāng)優(yōu)化目標(biāo)樣本數(shù)量足夠大時(shí),樣本平均值為優(yōu)化目標(biāo)真實(shí)值的無偏估計(jì)量。
2.2 改進(jìn)蟻群算法
在多目標(biāo)規(guī)劃中,當(dāng)解xA的所有目標(biāo)優(yōu)于解xB的目標(biāo)時(shí),稱xA支配xB,若無解支配xA,xA為非支配解(Pareto解)。
求解多目標(biāo)規(guī)劃的改進(jìn)蟻群算法信息素更新結(jié)合Pareto解,路徑信息素由其存留信息與Pareto解對應(yīng)螞蟻的信息素決定。路徑信息素更新后限制其濃度,避免過早收斂,同時(shí)引入方向啟發(fā)因子,加快迭代速度,改善基本蟻群算法在解決大規(guī)模問題時(shí),迭代速度過慢,過早收斂等使算法求解質(zhì)量低的問題。
2.2.1 多式聯(lián)運(yùn)網(wǎng)絡(luò)編碼及參數(shù)初始化
將原多式聯(lián)運(yùn)網(wǎng)絡(luò)節(jié)點(diǎn)拆分為兩部分后組成新節(jié)點(diǎn),新節(jié)點(diǎn)的整數(shù)位為原節(jié)點(diǎn)數(shù),小數(shù)位為運(yùn)輸方式編碼。初始化蟻群算法相關(guān)參數(shù)。
2.2.2 螞蟻移動(dòng)尋找路徑
大量的運(yùn)輸實(shí)踐經(jīng)驗(yàn)顯示:從起點(diǎn)到終點(diǎn)的最短路徑中任一路段與“起點(diǎn)-終點(diǎn)”連線間的夾角通常較小,即,最短路徑方向總是循著目的地方向,具體如圖2。即下一備選路徑與“起點(diǎn)-終點(diǎn)”連線間的夾角的大小與其成為最短路的概率呈負(fù)相關(guān)關(guān)系。
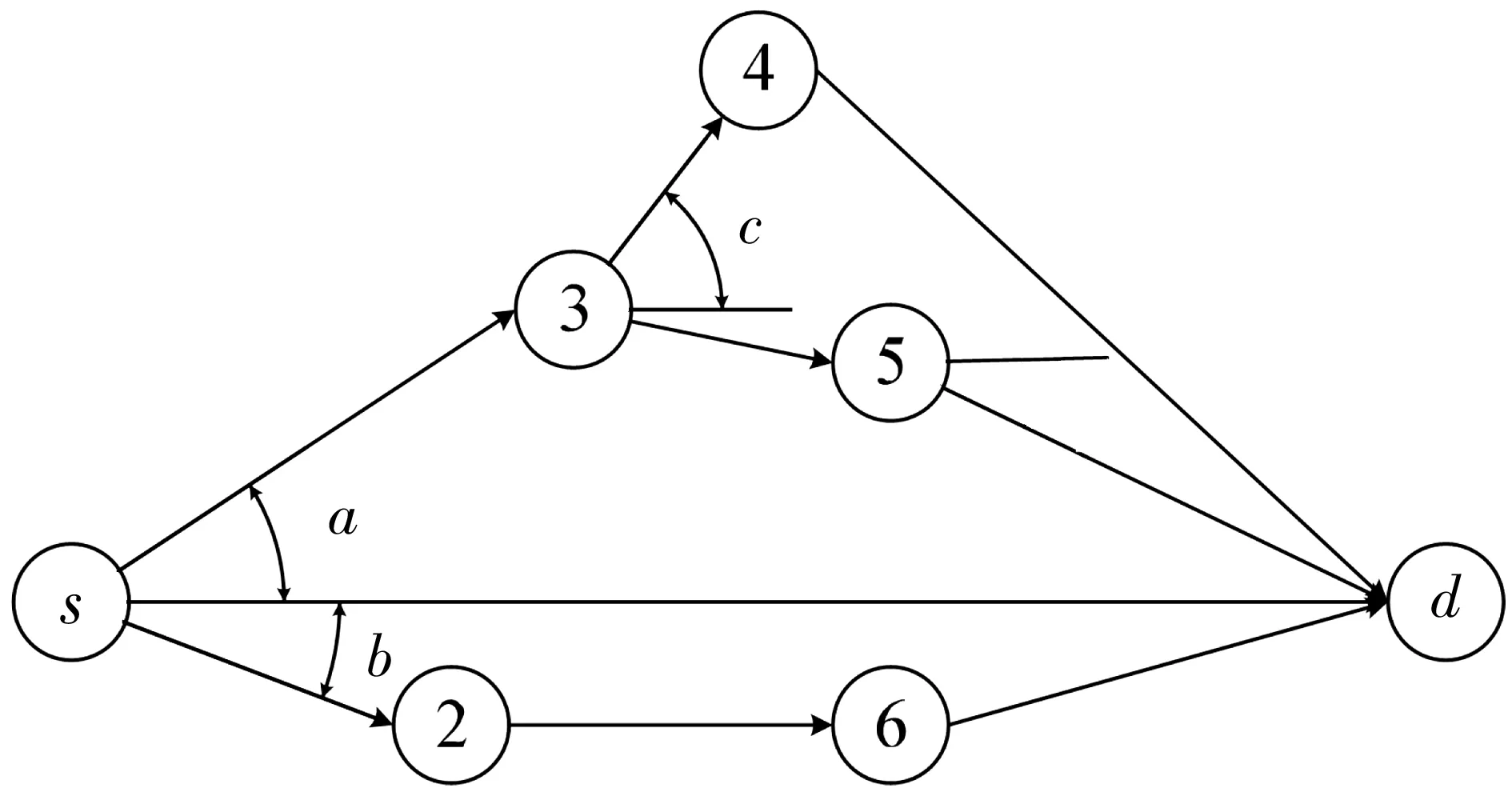
圖2 路段方向夾角示意Fig. 2 Schematic diagram of the angle of road section direction

(15)
(16)
式中:γ為節(jié)點(diǎn)i,j間的路段和“起點(diǎn)-終點(diǎn)”連線間的夾角,夾角越小,φij越大,其為最短路徑與選擇該路徑的概率就越大;τij,α分別為為節(jié)點(diǎn)i,j間的信息素濃度及其啟發(fā)因子;ηij,β分別為為節(jié)點(diǎn)i,j間的能見度及其啟發(fā)因子;allowedk是螞蟻下一步可選擇路徑的集合。
每只螞蟻從起點(diǎn)出發(fā),首先確定下一節(jié)點(diǎn)的可行路徑并保存入allowedk中;若allowedk為空集,螞蟻返回起點(diǎn),重新開始選擇路徑;否則根據(jù)式(16)確定的轉(zhuǎn)移概率與輪盤賭,選擇下一個(gè)節(jié)點(diǎn),直至螞蟻到達(dá)終點(diǎn),螞蟻完成一次路徑。
2.2.3 蒙特卡洛仿真

2.2.4 求Pareto解
運(yùn)用快速非支配排序算法[14]求截至本次迭代所有可行解的Pareto解。
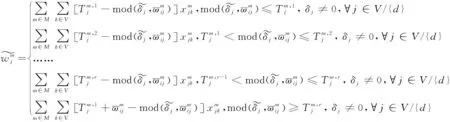
2.2.5 信息素更新
對Pareto解路徑中節(jié)點(diǎn)i,j間路段更新信息素τij,更新策略為:
τij(u+1)=(1-ρ)×τij(u)+ρ×Δτij(u+1)
(17)
(18)
式中:τij(u)為第u次迭代,路段i,j上的信息素值;τij(u+1)為更新后的信息素值;Δτij(u+1)為信息素增量;L(u)為第u次迭代Pareto解中可行解的平均值;ρ為信息素?fù)]發(fā)系數(shù)。
為避免“過早收斂”,通過“最大-最小螞蟻系統(tǒng)”限制路段信息素。
τij(u+1)∈[τmin,τmax]
(19)
(20)
(21)
式中:Vn為節(jié)點(diǎn)總數(shù);θbest為選取最優(yōu)的概率;h(u)為第u次迭代Pareto解中各組可行解平均值的最小值。
3 算例分析
選取文獻(xiàn)[15]的公鐵海聯(lián)運(yùn)實(shí)例,實(shí)例中包含25個(gè)節(jié)點(diǎn),構(gòu)建以朔州為起點(diǎn),上海為終點(diǎn)的多式聯(lián)運(yùn)網(wǎng)絡(luò)。假設(shè)不同節(jié)點(diǎn)同一運(yùn)輸方式班期相同,不同運(yùn)輸方式班期如表1,公路運(yùn)輸時(shí)間在±20%之間波動(dòng),鐵路與水運(yùn)運(yùn)輸時(shí)間在±10%之間波動(dòng)。
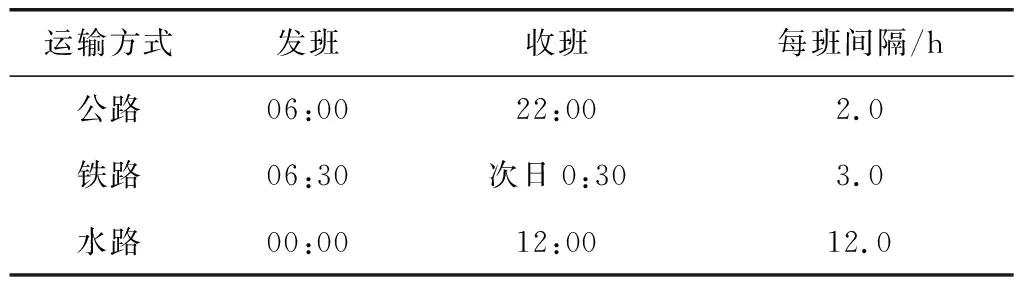
表1 不同運(yùn)輸方式班期Table 1 Schedule of different transportation modes
3.1 算法對比
多目標(biāo)優(yōu)化解的質(zhì)量常用比較指標(biāo)有Pareto解的均勻性(SP)及其寬廣性(MS)。
SP定義為:
(22)
(23)

MS定義為:
MS=
(24)
蟻群算法參數(shù)設(shè)置為:螞蟻數(shù)量取20、迭代次數(shù)取20次,蒙特卡洛模擬次數(shù)K=1 000,α=0.8,β=0.2,ρ=0.3,貨物重1 t。將改進(jìn)蟻群算法、方向蟻群算法、信息素限制蟻群算法及基本蟻群算法,分別運(yùn)行50次,結(jié)果如表2。
結(jié)果顯示,方向蟻群算法的解集平均值優(yōu)于基本蟻群算法與信息素限制蟻群算法11%~25%,說明方向啟發(fā)因子能夠加快迭代速度;Pn低24%~57%表明其易過早收斂,無法為決策提供更多選擇。相反,信息素限制蟻群算法能找到更多的Pareto解,但是解的質(zhì)量不高。結(jié)合表2與圖3~圖6,同時(shí)考慮兩種策略的改進(jìn)蟻群算法能在考慮Pn同時(shí)兼顧解的質(zhì)量,相較其他算法有一定優(yōu)越性。
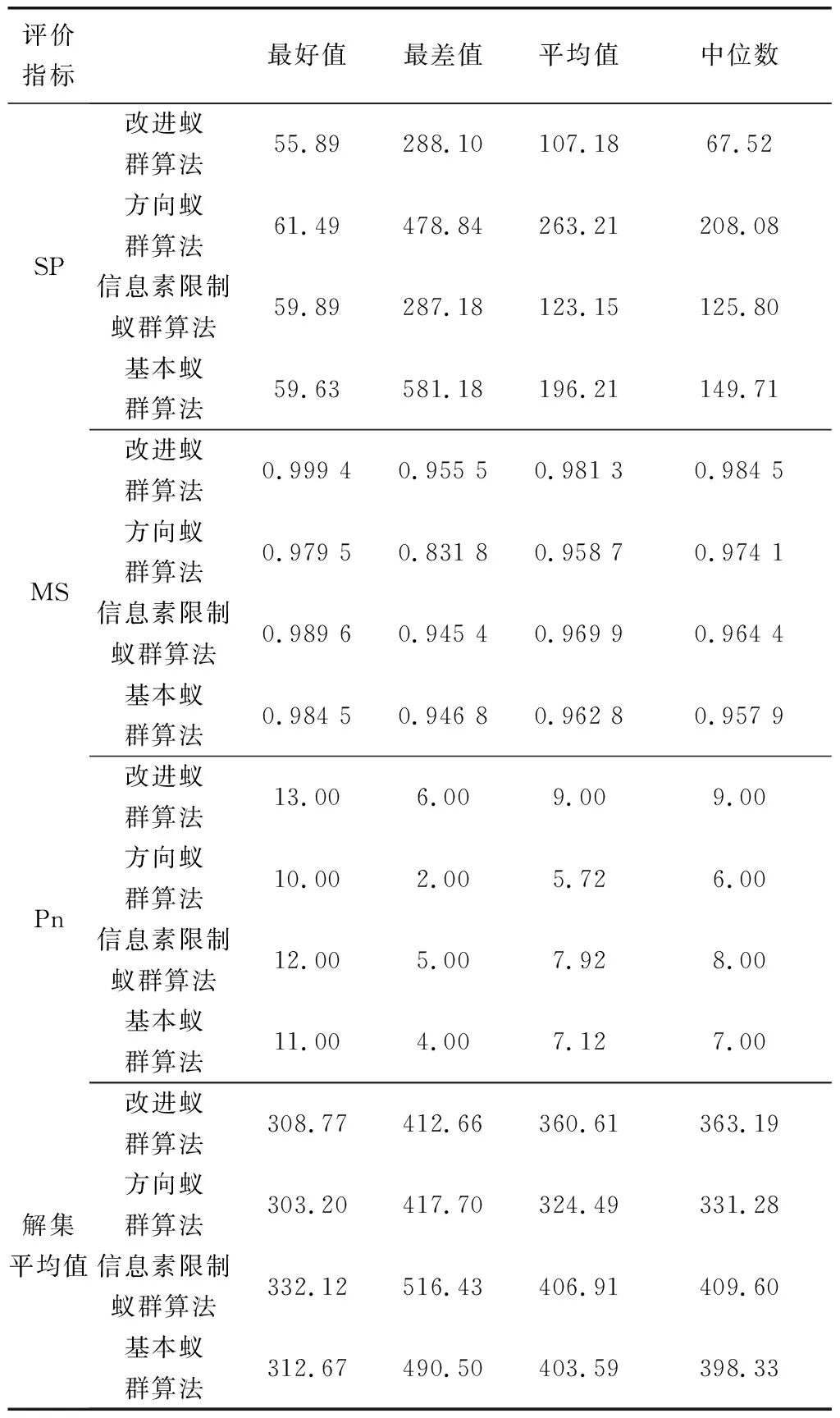
表2 算法運(yùn)行結(jié)果對比Table 2 Comparison of algorithm running results
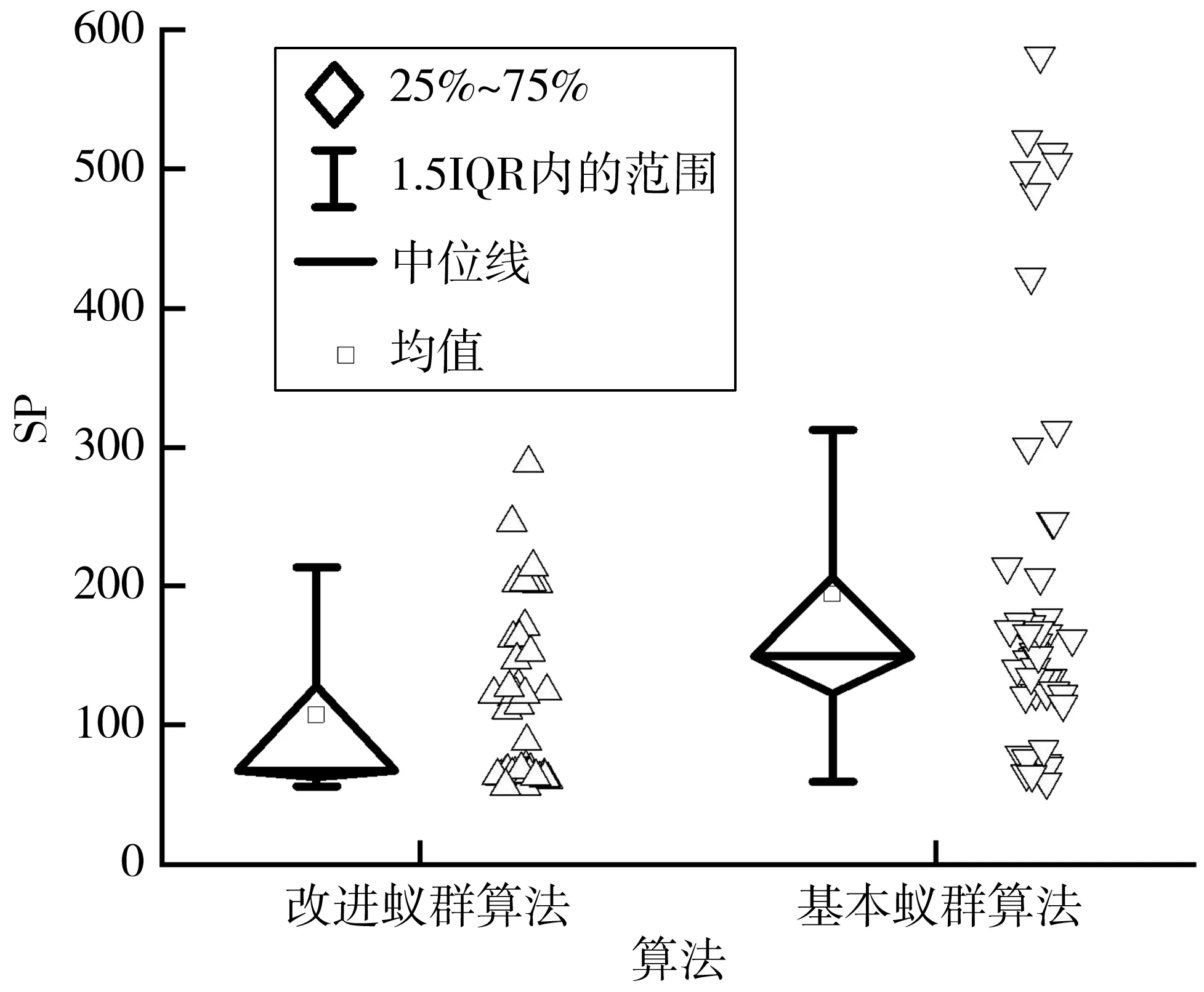
圖3 SP對比箱圖基本蟻群算法Fig. 3 SP comparison box plot of basic ant colony algorithm
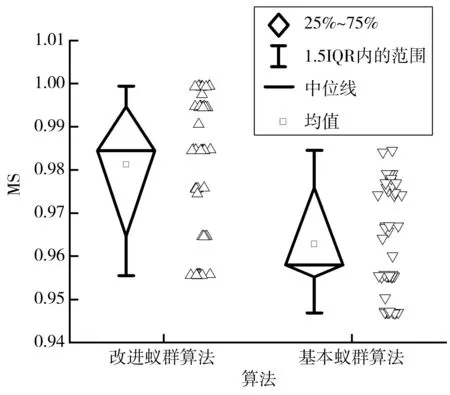
圖4 MS對比箱Fig. 4 MS comparison box plot
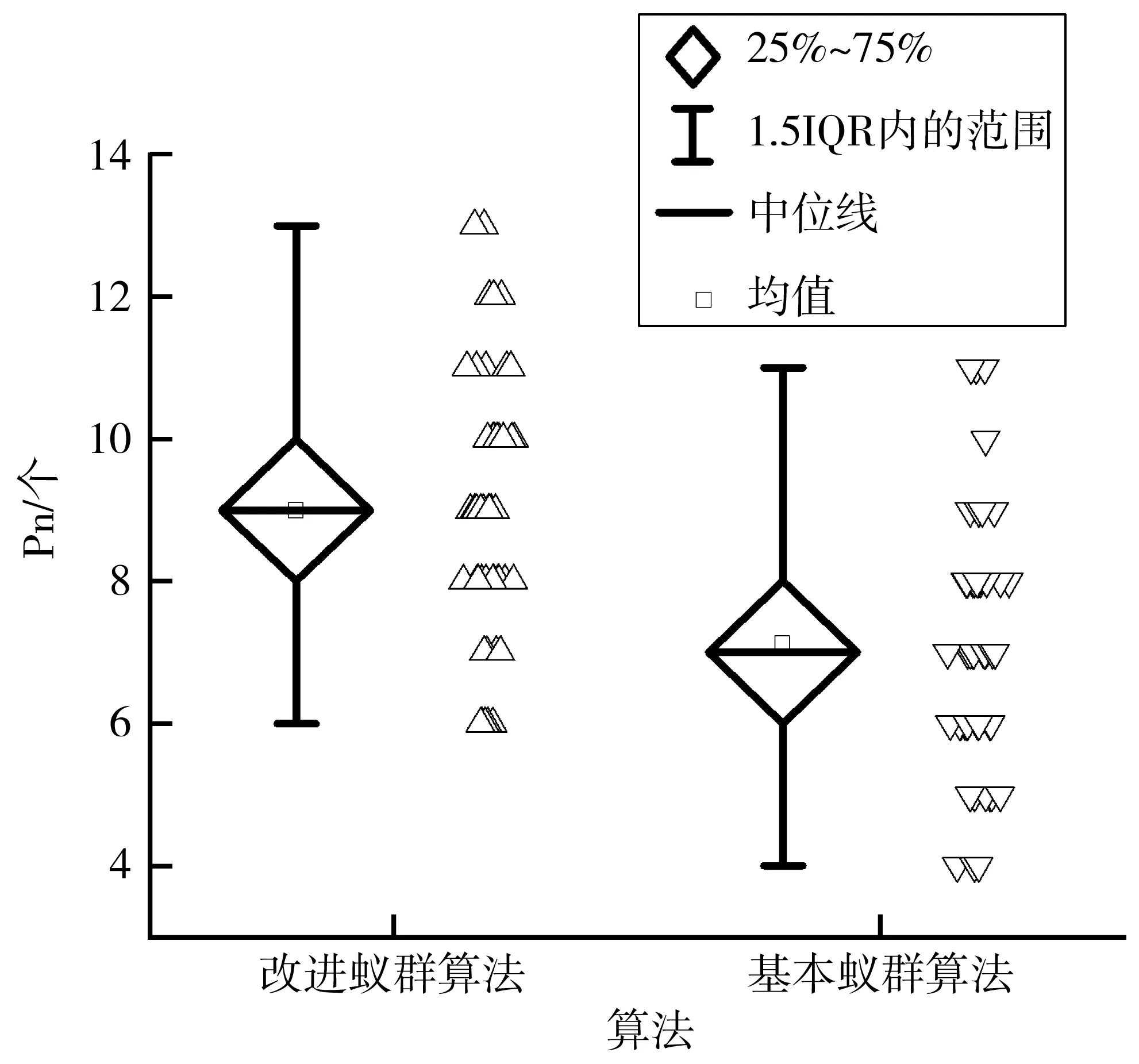
圖5 Pn對比箱Fig. 5 Pn comparison box plot

圖6 解集平均值對比箱Fig. 6 Solution set mean comparison box plot
3.2 算法參數(shù)分析
螞蟻個(gè)數(shù)設(shè)20,最大迭代次數(shù)30,α取0.7~0.9,β取0.3~0.1、ρ取0.2~0.4,其他參數(shù)不變,進(jìn)行50組對比實(shí)驗(yàn)。結(jié)果如圖7,僅α=0.9,β=0.1,ρ=0.4時(shí),實(shí)驗(yàn)平均Pn波動(dòng)超過1;實(shí)驗(yàn)平均解集平均值整體波動(dòng)小于5%。
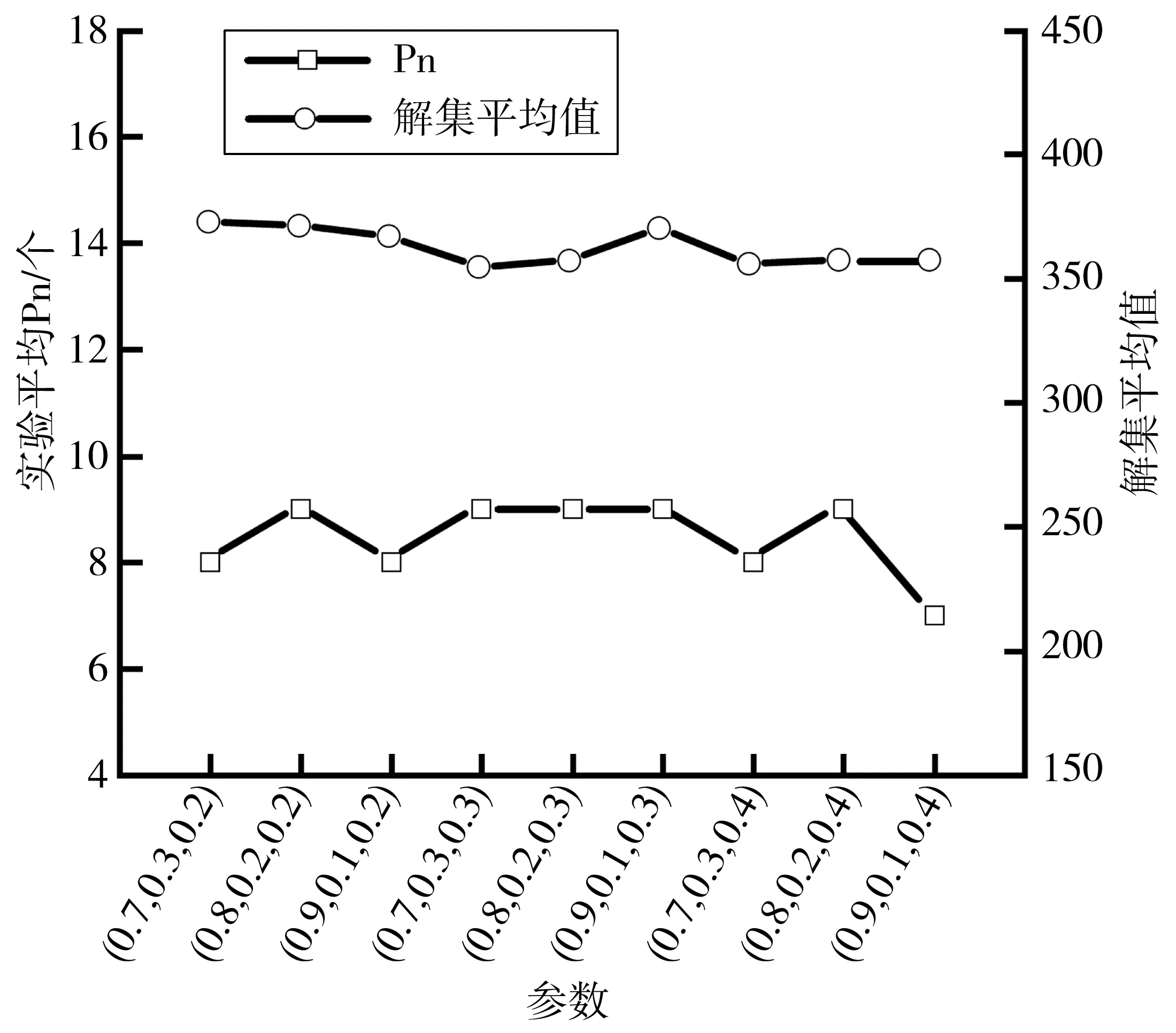
圖7 不同參數(shù)組合實(shí)驗(yàn)平均Pn與解集平均值Fig. 7 Experimental mean Pn and solution set mean of differentparameter combinations
設(shè)最大迭代次數(shù)30次,其他參數(shù)不變,螞蟻數(shù)分別為10、15、20和25進(jìn)行了50組對比實(shí)驗(yàn)。結(jié)果如圖8~圖9,不同螞蟻數(shù)算法都能在較低的迭代次數(shù)使實(shí)驗(yàn)平均Pn與解集平均值趨于定值;迭代結(jié)束實(shí)驗(yàn)平均Pn接近統(tǒng)一,實(shí)驗(yàn)平均解集平均值波動(dòng)小于5%。以上結(jié)果表明改進(jìn)蟻群算法對參數(shù)設(shè)置要求較低,算法具有一定的魯棒性。
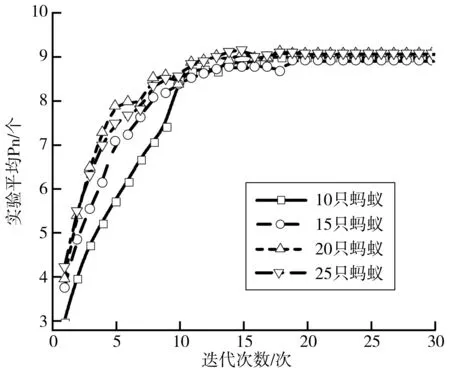
圖8 迭代次數(shù)與螞蟻數(shù)對實(shí)驗(yàn)平均Pn的影響Fig. 8 The influence of the number of iterations and ants on theexperimental mean Pn
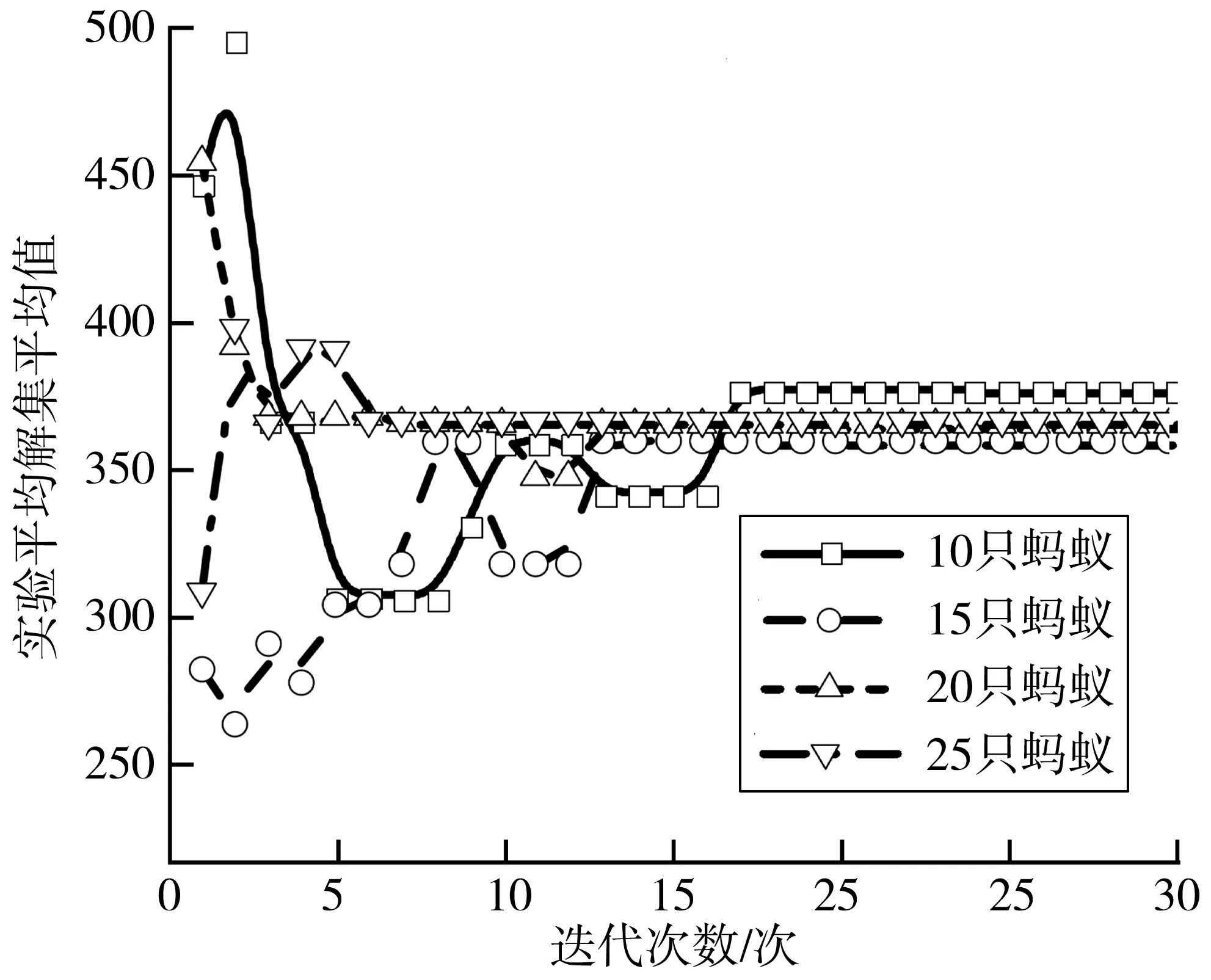
圖9 迭代次數(shù)與螞蟻數(shù)對實(shí)驗(yàn)平均解集平均值的影響Fig. 9 The influence of the number of iterations and ants onthe average value of experimental mean solution set
3.3 Pareto解分析
取算例結(jié)果中部分Pareto解如表3,決策人可根據(jù)對成本與時(shí)間的敏感性挑選不同方案。
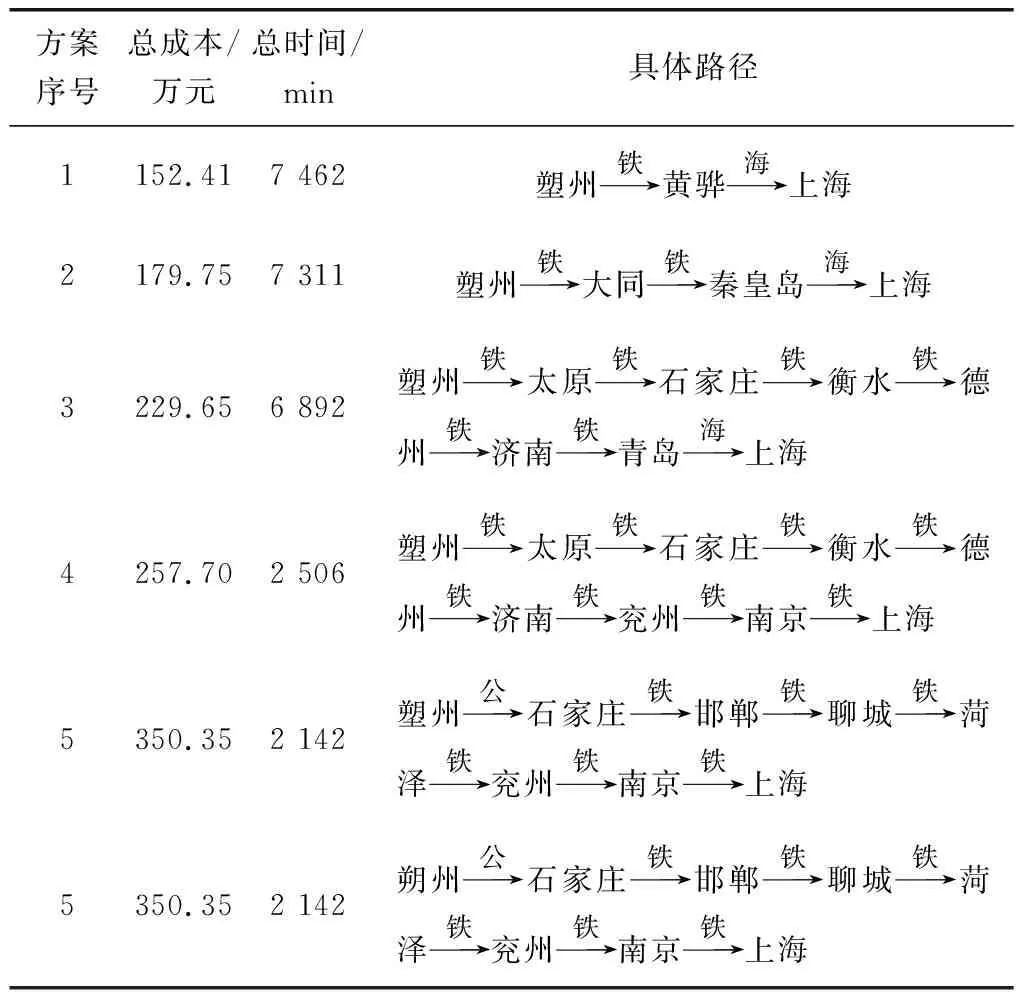
表3 部分非支配的運(yùn)輸方案Table 3 Partially non-dominant transportation scheme
將基于權(quán)重和基于Pareto理論的蟻群算法進(jìn)行比較,C和T兩個(gè)優(yōu)化目標(biāo)通過權(quán)重轉(zhuǎn)化為minZ=ω1C+ω2T單目標(biāo),其中ω1和ω1為權(quán)重,通過調(diào)整權(quán)重比例得到如表4。
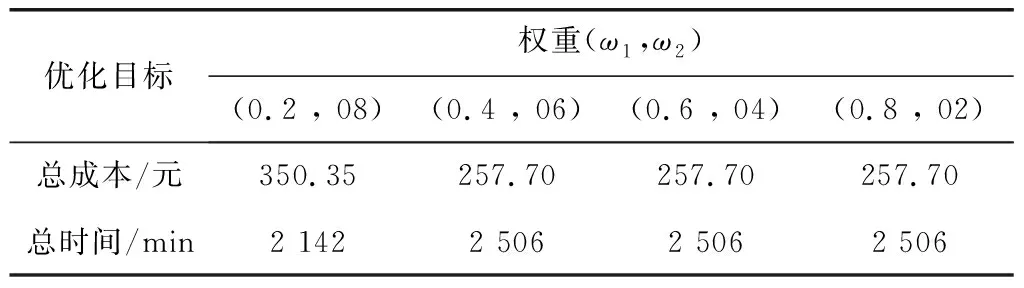
表4 不同權(quán)重下運(yùn)輸方案Table 4 Transportation schemes under different weights
通過圖10可知,Pareto解比基于權(quán)重的雙目標(biāo)蟻群算法的求解結(jié)果好,能提供更多可行方案,表明Pareto方法能更好地處理雙目標(biāo)問題。
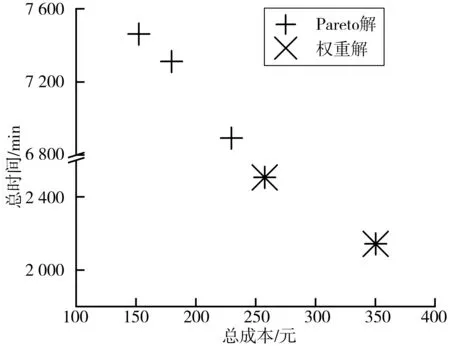
圖10 Pareto解與權(quán)重解對比Fig. 10 Comparison of Pareto solution and weighted solution
4 結(jié) 語
以運(yùn)輸總成本與運(yùn)輸總時(shí)間為優(yōu)化目標(biāo),構(gòu)建不確定環(huán)境下的多式聯(lián)運(yùn)最短路徑模型。使用蒙特卡洛方法處理網(wǎng)絡(luò)中的不確定性,改進(jìn)基本蟻群算法的轉(zhuǎn)移策略和信息素更新策略,結(jié)合非支配排序的改進(jìn)蟻群算法求解Pareto解。同一環(huán)境下進(jìn)行50次試驗(yàn),驗(yàn)證改進(jìn)蟻群算法優(yōu)化效果;然后分別改變迭代次數(shù)、螞蟻數(shù)量、信息素啟發(fā)因子、能見度啟發(fā)系數(shù)和信息素?fù)]發(fā)系數(shù),結(jié)果顯示:算法參數(shù)設(shè)置對算法影響不明顯;同時(shí)算法結(jié)果驗(yàn)證了Pareto理論解決多目標(biāo)問題的優(yōu)越性。
通過對一個(gè)仿真算例進(jìn)行實(shí)驗(yàn)分析。研究發(fā)現(xiàn)公路運(yùn)輸擁有較高靈活度,能提高貨物運(yùn)輸效率,但運(yùn)輸成本較高;鐵路運(yùn)輸各屬性平衡;海運(yùn)運(yùn)輸將大幅度提升運(yùn)輸總時(shí)間,但成本較低。故當(dāng)決策人對貨物無時(shí)效性要求,且對成本比較敏感,可選擇方案1或2,通過海運(yùn)運(yùn)輸,犧牲運(yùn)輸時(shí)間,降低運(yùn)輸成本;如決策人對貨物時(shí)效性(如原材料限制后續(xù)生產(chǎn))及成本皆有要求,可根據(jù)決策人實(shí)際要求選擇合適方案;如決策人對貨物時(shí)效性有要求,且愿意提高預(yù)算,可選擇方案5,在運(yùn)輸路徑中部分選擇公路運(yùn)輸,提高運(yùn)輸效率。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中華手工(2017年2期)2017-06-06 23:00:31
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
