一種基于UG/Motion實現曲線求導的方法
2021-11-10 04:17:20李玉勝董保香趙國慶王圣偉
山東理工大學學報(自然科學版) 2021年1期
李玉勝 ,董保香 ,趙國慶 ,王圣偉
(1.山東理工大學 機械工程學院, 山東 淄博 255049;2.淄博職業學院 電子電氣工程學院, 山東 淄博 255314;3. 山東飛馬索道纜車設備有限公司, 山東 淄博255000)
諸如凸輪機構等運動機構的設計,不僅僅需要實現機構預期的運動軌跡,而且還需要考慮其速度、加速度等運動規律特性。用解析法設計軌跡曲線時,因為有數學公式,求導容易,可方便地給出速度、加速度曲線;但用圖解法設計軌跡曲線時,則無法給出求導后的曲線。因此,對于圖解法,迫切需要一種利用已知軌跡曲線,求導得出速度、加速度曲線的方法[1-4]。本文給出一種連續曲線的求導方法。
1 導數的形成
2 利用UG/Motion求導的步驟
利用UG/Motion的求導步驟如下:
1)根據機構的運動要求,繪制位移軌跡曲線;根據需要繪制描述點t0(X0,Y0)、點t(X,Y),描述求導得出所需的Y方向運動曲線。
2)建立表達式變量Δx等。
3)創建運動仿真模型,定義連桿與運動副,并賦予傳動運動副以驅動,特別要注意處理好描述求導得出的自定義函數。
4)定義點在線上幅、線在線上幅等約束條件。
5)創建標記點,用于追蹤求導后的結果。
6)設置追蹤,追蹤上述標記點。
7)設置求解時間與步數等求解參數并求解。
8)運行動畫,激活追蹤,運行后獲得追蹤點,該點云就是描述求導后的軌跡點。
9)用樣條曲線擬合點云,獲得求導后的曲線。
3 sin(x)曲線的求導方法
以曲線sin(x),x∈[0,2π]為例,利用UG/Motion運動仿真模塊,按照上述步驟,實現正弦曲線的求導。
1)在UG環境中,新建文件QiuDao.prt,為方便參數化驅動以及分析求導后的點云和曲線與正弦曲線之間的偏差,在QiuDao.prt文件中不繪制任何圖形元素,把所有參數以及幾何元素繪制在創建的motion.sim文件中。
2)進入運動仿真模塊,新建運動仿真,選擇動力學分析類型,仿真名為motion。
3)進入建模模塊,利用表達式功能,建立如圖1所示表達式:t=1,t是UG系統變量,是從0到1的動態變量;xt=2*pi()*t,pi()是UG系統內函數,xt的變化范圍是[0,2π];yt_sin=sin(xt*180/pi()),UG中正弦函數自變量只能是度數,所以需要把弧度值轉化為對應的角度值;yt_dos=cos(xt*180/pi()),正弦求導后對應的余弦曲線,用來檢測求導結果的正確性與準確程度;zt=0,z軸值為0,正弦余弦曲線繪制在XOY平面內;Delta_X=2*pi()/360,用Delta_X表示增量Δx。
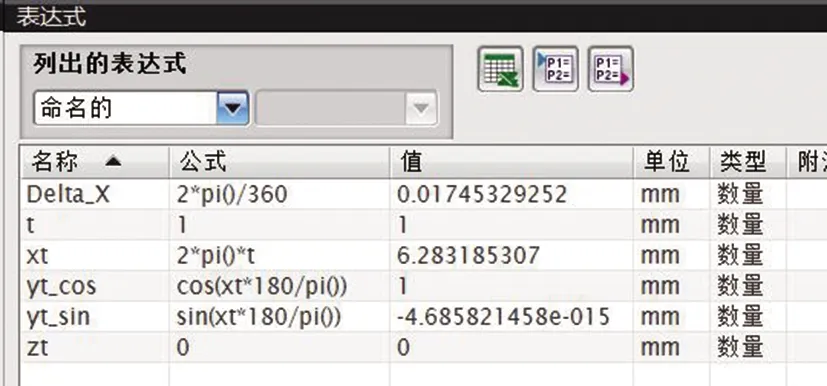
圖1 表達式Fig.1 Expression
4)利用規律曲線,結合上述表達式,建立正弦曲線、余弦曲線,其中距離公差設置為0.000 1。
5)基于XOY平面創建草圖,繪制如圖2所示4條線段,線段端點與正弦曲線存在點在線上幾何約束,用這4條線段與正弦的交點表示點t0(X0,Y0)與t(X,Y),兩點之間水平距離設置為Delta_X。用這4條線段分別描述t0與t點沿著X、Y方向移動的連桿。在表達式對話框中,可隨時修改Delta_X值,參數化驅動功能會立即更新兩點之間的水平距離。
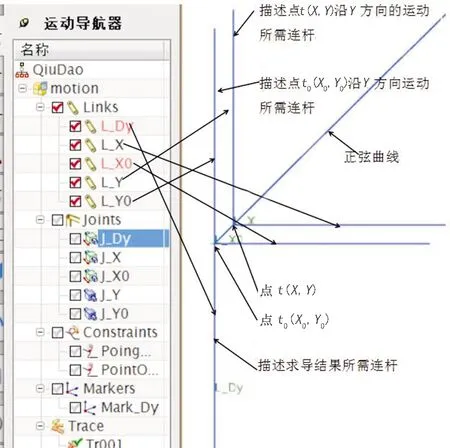
圖2 連桿與運動副Fig.2 Links and joints
6)進入運動仿真模塊,激活Motion仿真,創建如圖2所示5個連桿。L_X用來表示t點沿X方向運動的所需連桿;L_Y用來表示t點沿Y方向運動的所需連桿;L_X0用來表示t0點沿X方向運動的所需連桿;L_Y0用來表示t0點沿Y方向運動的所需連桿。L_Dy是獲取導數值所需連桿。所有連桿質量屬性為自定義,質心選擇各條線段靠近正弦曲線側的端點,慣性CSYS采用絕對坐標系,質量為10;IXX、IYY、IZZ分別為10;IXY、IXZ、IYZ分別為0。
7)創建如圖2所示平動副。J_X是連桿L_X的水平方向平動副,無基本連接桿。J_Y是連桿L_Y的豎直方向平動副,基本連接連桿為L_X。J_X0是連桿L_X0的水平方向平動副,無基本連接桿。J_Y0是連桿L_Y0的豎直方向平動副,基本連接連桿為L_X0。J_Dy是連桿L_Dy的豎直方向平動副,基本連桿連接為L_X0。
8)利用點在線上幅,把t與t0點約束到正弦曲線上。PointOnCurve_XY是把連桿L_Y用于表示點t(X,Y)的下端點約束到正弦曲線上。PointOnCurve_X0Y是把連桿L_Y0用于表示點t0(X0,Y0)的下端點約束到正弦曲線上。為保持精度,選擇基于曲率的曲線參數化方法。
9)對J_X,J_X0分別設置驅動,皆為恒定平移模式,初速度值為2*pi(),單位為mm/s,即用1 s時間平動運動2*pi() mm的距離。
10)設置描述導數值的平動副J_Dy,驅動方式選擇函數,函數類型為位移,采用函數管理器,插入函數math_func,值為點t(X,Y)與點t0(X0,Y0)在Y方向的差值,即只需要導入Y方向的位移,觀察變量為位移,選擇分量為Y,參考框架為絕對坐標系。在本仿真中,值為(DY(45,1,1)-DY(71,1,1))/Delta_X。
11)建立標記點Mark_Dy,連桿選擇L_Dy,指定點為L_DY連桿靠近正弦曲線側的端點,CSYS采用絕對坐標系。
12)設置追蹤Tr_Dy,追蹤對象為Mark_Dy,參考框架為絕對坐標系,目標層為10,并激活。
13)新建結算方案,時間為1 s,步數為360步,即用360步仿真完整個過程。在求解器參數中,設置動力學/運動學的誤差為0.000 1,靜力學誤差為0.000 1。
14)求解。
15)設置圖層10為工作圖層。打開動畫對話框,啟用追蹤封裝選項,播放后,可看到隨著點t(X,Y)與點t0(X0,Y0)沿著正弦曲線的移動,Mark_Dy標記點被打出,該點的Y值就是t0(X0,Y0)點的導數。
4 驗證
1)將Mark_Dy的追蹤點與余弦曲線對比,肉眼基本看不出區別。利用菜單“分析->偏差-->度量”偏差度量功能,把所有點與余弦曲線對比,如圖3所示,可得出最大偏差值為0.006 2 mm,該值是在Delta_X為2pi()/360的前提下得到的,如果進一步縮小Delta_X值,則偏差會更小。圖3顯示了Mark_DY追蹤點與余弦曲線的對比,為方便觀察,追蹤點只顯示了大約一半。

圖3 點云與余弦曲線Fig.3 Points and cos(x) curve
2)利用樣條曲線的擬合功能,把點云擬合成樣條曲線,分析樣條曲線與余弦曲線的誤差,也為0.006 2 mm。樣條曲線與余弦曲線的曲率梳對比如圖4所示,左側是余弦曲線的曲率梳,右側是求導后曲線的曲率梳,可以看出求導所得曲線的曲率略有不光順,但總體來說,沒有比較大的突變。

圖4 擬合樣條與余弦曲率梳對比Fig.4 Curvature comb of cos(x) and spline
3)若著重曲率的光順,可在擬合樣條曲線時,略微放大公差,圖5是曲線階次為3,公差為0.01時的擬合樣條曲線,該樣條曲線與理論預先曲線偏差為0.011 2 mm,左側是余弦曲線的曲率梳,右側是擬合樣條曲線的曲率梳,可以看出,兩曲率梳基本沒什么區別。
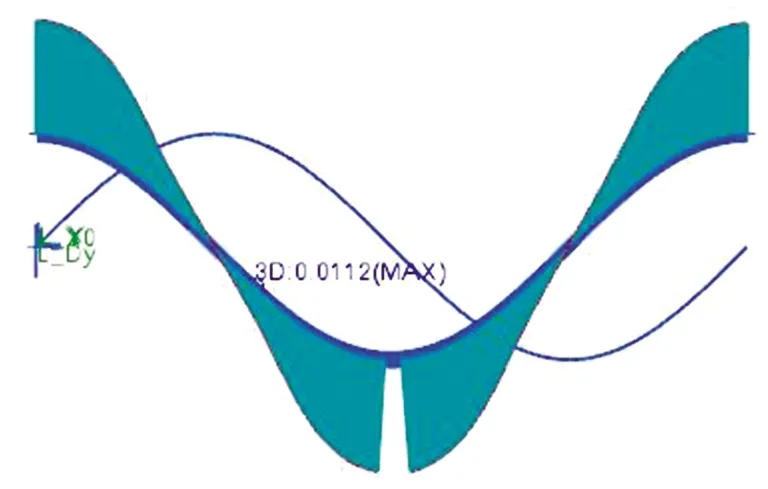
圖5 擬合樣條調整后的曲率梳Fig.5 Spline curvature after modification
5 結論
1)根據導數定義,利用UG的運動仿真功能,實現對sin(x)曲線的求導,驗證了利用運動仿真功能對連續曲線求導方法的正確性。
2)給出了運動仿真得到的點云、擬合樣條曲線與理論求導曲線的誤差,若想提高精度,可減小Δx的變量值,直到滿足工程應用需求。
3)對于非連續曲線,若非連續點恰好被Δx越過,也可以求出導數曲線。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
少先隊活動(2021年4期)2021-07-23 01:46:22
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
