融合多源信息的室內定位App的設計與實現(xiàn)
2021-11-10 06:00:40朱律
城市勘測 2021年5期
關鍵詞:模型
朱律
(上海市測繪院,上海 200063)
1 引 言
如今,各大公共場所基本部署了一定量的WiFi熱點與網(wǎng)關,智能手機都能接收無線保真(wireless fidelity,WiFi)進行定位[1];同時,智能手機一般都配置有加速度傳感器、磁傳感器、陀螺儀等微型電子機械系統(tǒng)(Micro-Electro-Mechanical System,MEMS)傳感器,利用這些微型傳感器可以在短時間內獲得位置變化信息,即通過行人航跡推算(Pedestrian Dead Reckoning,PDR)來實現(xiàn)室內定位[2]。WiFi定位易受障礙物以及多路徑效應等因素的干擾,穩(wěn)定性較差[3],而PDR定位則存在著嚴重的誤差累積效應[4]。
因此,本文融合上述兩種方式進行組合定位,利用Eclipse跨平臺開源集成開發(fā)環(huán)境和Android SDK軟件開發(fā)工具包,基于JAVA編程語言在安卓智能手機終端開發(fā)了室內定位App,實現(xiàn)了WiFi定位與PDR定位的優(yōu)勢互補,獲得了更高精度的定位結果。
2 WiFi定位模塊
以WiFi接收信號強度(received signal strength indication,RSSI)為觀測值,一般包括傳播模型法和位置指紋法兩類定位方法:傳播模型法是指利用信號傳輸模型將RSSI轉化為距離,再進行距離交會[5];位置指紋法分為離線和在線兩個階段,離線階段建立RSSI與采樣位置對應的關系,在線階段通過位置指紋算法匹配出與實時信號強度最佳匹配的位置[6]。
在傳統(tǒng)對數(shù)路徑損耗模型基礎上設計顧及無線接入點位置和隨機噪聲項的距離交會迭代算法[7],可以提高WiFi距離模型定位的精度;在傳統(tǒng)的位置指紋加權K最近鄰(weighted K-nearest neighbor,WKNN)算法中,引入灰色關聯(lián)分析,依據(jù)方差信息設計每個無線接入點的計算權值[8],可以提高WiFi位置指紋定位的精度。本文設計的室內定位App中的WiFi定位模塊利用上述自主研究的改進WiFi位置指紋定位算法和改進距離模型定位算法,基于安卓智能手機終端分別實現(xiàn)了WiFi數(shù)據(jù)采集和定位功能。Eclipse開發(fā)環(huán)境下WiFi距離模型室內定位的設計界面如圖1所示,位置指紋定位離線指紋建庫界面如圖2所示:
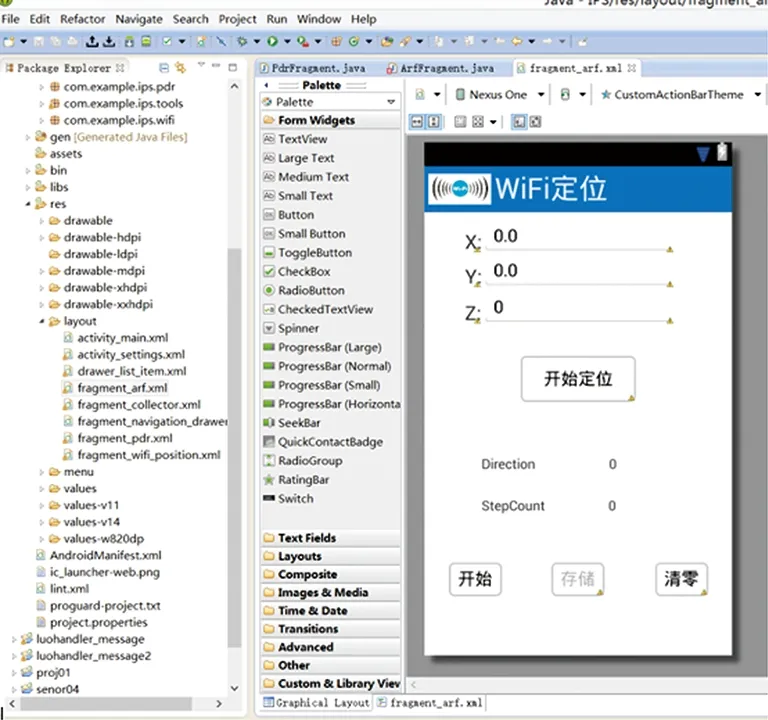
圖1 Eclipse開發(fā)環(huán)境下WiFi距離模型定位界面
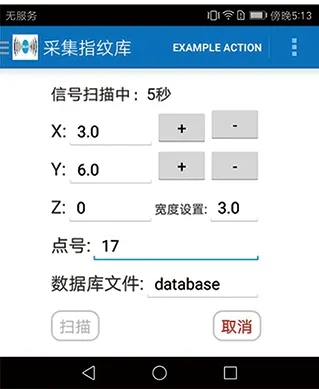
圖2 WiFi位置指紋定位界面
3 PDR定位模塊
PDR定位模塊主要實現(xiàn)了調用手機中的加速度傳感器和磁場傳感器來得到行人行走的步數(shù),調用陀螺儀和方向傳感器得到行人行走的方向,再結合加速度傳感器推估的步長進而得到行人行走的完整軌跡。針對上述主要步驟,本文分別研究算法對獲取到的各類傳感器的數(shù)據(jù)進行處理,降低上述步驟中使用的各種慣性傳感器存在的隨機誤差,結果表明使用優(yōu)化之后的傳感器數(shù)據(jù)能夠有效提高行人航跡推算方法的精度和可靠性。
3.1 步數(shù)檢測
行人的行走步態(tài)包括抬腳、跨步、落地,各個方向的加速度表現(xiàn)為波峰與波谷曲線的交替變換,具有一定規(guī)律和周期性。所以,步數(shù)的檢測可以利用加速度傳感器來實現(xiàn)[9]。首先通過對加速度傳感器三軸的測量值進行低通濾波,可以分離出重力在各個軸上的分量剔除重力干擾后三軸的線性加速度[10]。加速度傳感器在三軸輸出的波形都具有一定的周期性,但都不十分明顯。因此,計算三軸的平方和開根號作為整體加速度來進行分析。由于行人行走的隨意性和手機MEMS傳感器不高的精度,在加速度傳感器采集信號的過程中會產生一定的噪聲。為了盡可能減小噪聲對判斷計步數(shù)的影響,采用簡單移動平均法(Simple Moving Average Method,SMA)來平滑數(shù)據(jù)[11]。簡單移動平均法將該時刻前的若干個測量值的均值作為預測值,與此刻的測量值共同得到平滑值。經(jīng)過SMA平滑后,能夠比較明顯地區(qū)分出各步的周期。
3.2 步長估計
在行人前進的過程中,使用動態(tài)模型來進行估計。動態(tài)模型通過建立人體行走模型分析步長和每個記步周期中身體位移之間的聯(lián)系,從而獲取步長與加速度之間的關系并推算步長的動態(tài)變化[12]。行人在正常變速行走的情況下,速度是一個逐漸變化的過程。因而在使用動態(tài)模型進行步長估計時,任意時刻前后兩步之間步長的差異不會過大。所以,可以借助前一步的步長對后一步的步長進行預測與調整,即使用卡爾曼濾波結合動態(tài)估計模型對步長進行修正。
3.3 航向估算
當所處的室內環(huán)境中有較強的磁干擾時,磁傳感器數(shù)據(jù)會嚴重失真,造成一定程度的方位偏離。陀螺儀不受磁干擾的影響,在短時間內通過對輸出的角速度積分能夠得到精確的方位數(shù)據(jù)[13],但受制于自身數(shù)據(jù)漂移的影響誤差會隨著時間不斷累積,并且得到的方位都是相對于初始方向的位置。因此,本文融合加速度傳感器,磁傳感器和陀螺儀三種傳感器共同對行人的方位進行估計,從而削弱室內磁干擾信號和陀螺儀漂移誤差帶來的影響,得到更可靠的方位角信息。在獲得加速度傳感器和磁傳感器計算的方向值后,將該數(shù)據(jù)與陀螺儀輸出的角速度積分得到的方向值進行融合,使用卡爾曼濾波算法彌補兩種方式各自的缺點,得到更符合行人實際行走情況的航向角。融合傳感器方向信息的卡爾曼濾波狀態(tài)預測方程可以表示為:
(1)
(2)

(3)
(4)
(5)

4 WiFi與手機慣性傳感器組合定位
WiFi定位方法可以獲取用戶的實時絕對位置,且誤差不隨時間積累,具有良好的低頻響應特性,但其數(shù)據(jù)輸出頻率低,并易受障礙物以及多路徑效應等因素的干擾,定位穩(wěn)定性較差;基于手機慣性傳感器的航跡推算定位方法在短時間內能夠獲取較高精度的定位結果,但需要其他定位方式提供初始絕對位置,且存在著嚴重的誤差累積效應。因此,引入自適應抗差濾波理論,構建誤差判別統(tǒng)計量,設計一種WiFi與PDR自適應抗差濾波組合定位算法,融合兩種方式進行組合定位,可以獲得更高精度的定位結果。根據(jù)卡爾曼濾波模型,行人行進中的線性動力學模型和觀測模型可以分別表示為:
(6)
Lk=AkXk+ek
(7)
式(6)中,Φk,k-1為狀態(tài)轉移矩陣,Wk為動力學模型噪聲向量,Xk為系統(tǒng)狀態(tài)向量,式(7)中ek為觀測噪聲向量,Ak為設計矩陣,Lk為觀測向量,共有三個參數(shù),前兩項由WiFi與PDR兩種定位方式的位置差構成,后一項由不同傳感器之間的航向差構成,即:
(8)
觀測誤差方程:
(9)
自適應抗差濾波的預測方程:
(10)
(11)
當預測步驟完成后,根據(jù)狀態(tài)參數(shù)估計向量與預測狀態(tài)參數(shù)向量之間的不符值可構成模型誤差的狀態(tài)不符值統(tǒng)計量。求得狀態(tài)不符值統(tǒng)計量后,根據(jù)設置的閾值來確定自適應因子αk,即可得到自適應抗差濾波的更新方程:
(12)
(13)
(14)
(15)
(16)
基于安卓移動端的室內定位App分別按照上述步驟實現(xiàn)了組合定位。組合定位設計界面如圖3所示,組合定位中需要設置的掃描時間參數(shù)、計步參數(shù)和靈敏度如圖4所示:

圖3 組合定位模塊界面 圖4 組合定位模塊參數(shù)設置界面
5 實驗分析
為了驗證算法的可靠性與準確性,進行了實驗分析。實驗環(huán)境搭建在上海市測繪院C樓二樓走廊,在實驗場地內共分散布設了5個信號節(jié)點,WiFi指紋點的分布位置如圖5紅色圓圈所示。行人的真實行走軌跡為以走廊的一端為起始方向保持直行,直至步行到走廊的另一端轉彎,如圖5紅色實線所示,起始點用紅色五角星標注。

圖5 測繪院二樓走廊場地
重復進行4次實驗,PDR定位、WiFi定位以及兩者自適應抗差濾波組合的定位軌跡如圖6所示。圖6中黃色線型為實際軌跡;藍色線型為PDR定位軌跡;綠色線型為WiFi定位軌跡;紅色線型為組合定位軌跡。
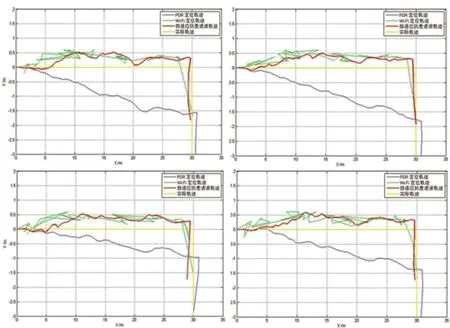
圖6 不同室內定位模型定位軌跡圖
重復實驗的精度統(tǒng)計結果如表1所示:
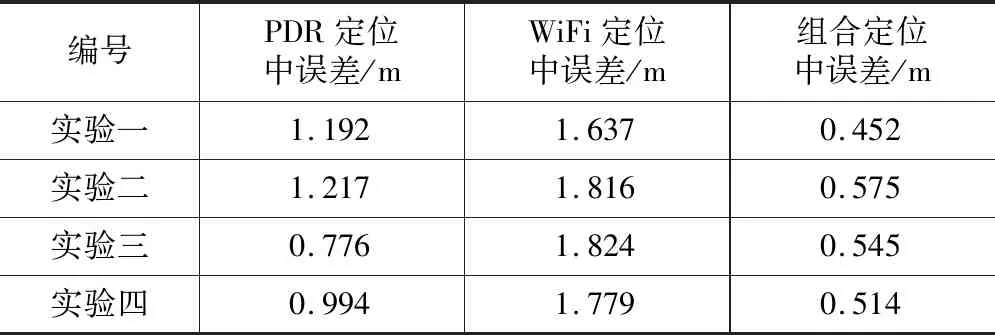
不同室內定位模型的定位結果對比 表1
由定位點統(tǒng)計結果可知,每次實驗中兩者的自適應抗差組合定位精度均優(yōu)于單獨使用PDR定位方式和WiFi定位方式。
6 結 論
本文通過引入自適應抗差濾波理論,構建誤差判別統(tǒng)計量,設計了WiFi與PDR自適應抗差濾波室內組合定位算法,并基于安卓移動端開發(fā)室內定位App實現(xiàn)了上述算法。通過實驗分析,結果表明融合WiFi與MEMS傳感器兩種定位方式的組合定位更加符合實際的行走軌跡。如何在定位算法中更好地融合采樣頻率不同的多源數(shù)據(jù),進而獲得更高的定位精度是接下來需要進一步研究的問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19